基于深度卷積特征的水下目標(biāo)智能識(shí)別方法
2019-07-16 06:16:16廖泓舟
水下無(wú)人系統(tǒng)學(xué)報(bào) 2019年3期
杜 雪,廖泓舟,張 勛
(哈爾濱工程大學(xué) 海洋裝置與控制技術(shù)研究所,黑龍江 哈爾濱,150001)
0 引言
水下無(wú)人航行器(unmanned undersea vehicle,UUV)作為各種水下任務(wù)的輔助手段,可避免作業(yè)人員在較危險(xiǎn)的水下環(huán)境中工作,且能很好的適應(yīng)水下環(huán)境和開(kāi)展水下任務(wù)[1-2]。在民用領(lǐng)域,其可用于水下電纜鋪設(shè)、水下管道質(zhì)量檢測(cè)、水下設(shè)備的維護(hù)與維修、漁場(chǎng)監(jiān)測(cè)等,例如美國(guó)Ocean Seaver公司生產(chǎn)的Iver2 UUV已經(jīng)被廣泛用于環(huán)境監(jiān)測(cè)和海洋勘探等領(lǐng)域[3];在軍用領(lǐng)域則可用于偵察、布雷、滅雷和援潛救生等,比如美國(guó)海軍著名的先進(jìn)無(wú)人搜索系統(tǒng)(advanced unmanned search system,AUSS)能潛入海底6 100 m,自動(dòng)搜索水下目標(biāo)并通過(guò)水下攝像機(jī)進(jìn)行拍照,實(shí)現(xiàn)對(duì)水下軍事目標(biāo)的搜索和跟蹤任務(wù)[4]。這些都是依據(jù)UUV對(duì)水下目標(biāo)的識(shí)別而完成的。
目前水下目標(biāo)的識(shí)別主要可以通過(guò)聲視覺(jué)和光視覺(jué) 2種方式。其中,聲視覺(jué)系統(tǒng)在遠(yuǎn)距離目標(biāo)識(shí)別跟蹤上占有絕對(duì)優(yōu)勢(shì),但由于受到聲波的盲區(qū)和多通道效應(yīng)的影響,在近距離目標(biāo)識(shí)別領(lǐng)域的發(fā)展受到限制;相反,UUV可通過(guò)光視覺(jué)充分利用人工智能技術(shù)進(jìn)行水下目標(biāo)的探測(cè)和描述,逐漸成為近距離水下目標(biāo)識(shí)別跟蹤的主要研究方向[5]。傳統(tǒng)的水下目標(biāo)識(shí)別主要分為被識(shí)別信號(hào)獲取、信號(hào)特征提取、目標(biāo)識(shí)別 3個(gè)過(guò)程[6]。其中的特征提取是一個(gè)既費(fèi)時(shí)費(fèi)力又需大量經(jīng)驗(yàn)的繁瑣處理過(guò)程,整個(gè)水下目標(biāo)識(shí)別系統(tǒng)屬于一個(gè)半自動(dòng)化過(guò)程,并于近年向全自動(dòng)識(shí)別方向發(fā)展[7]。基于此,對(duì)水下智能目標(biāo)識(shí)別方法的研究具有重要意義。借助于人工智能技術(shù)的蓬勃發(fā)展,將基于深度學(xué)習(xí)的圖像識(shí)別技術(shù)引入水下,構(gòu)建水下端到端的通用圖像智能識(shí)別技術(shù),提高UUV在“看”方面的智能化水平,使UUV學(xué)會(huì)“看得更多,看得更準(zhǔn)”,將對(duì)UUV的智能化發(fā)展有著重大意義,同時(shí)在軍民融合的時(shí)代背景下,能夠進(jìn)一步促進(jìn)UUV的多用途化。
近幾年,國(guó)內(nèi)外學(xué)者開(kāi)始將深度學(xué)習(xí)技術(shù)引入水下進(jìn)行目標(biāo)智能識(shí)別。國(guó)外的公開(kāi)研究主要是將深度學(xué)習(xí)技術(shù)用于水下聲吶圖像識(shí)別,如Kim等[8]提出了將深度卷積神經(jīng)網(wǎng)絡(luò)用于前視聲吶圖像,對(duì)聲吶圖像中的遙控水下航行器(remotely operated vehicle,ROV)進(jìn)行識(shí)別跟蹤,顯著提高了識(shí)別準(zhǔn)確度;Matias[9]也將深度卷積神經(jīng)網(wǎng)絡(luò)用于前視聲吶中多種目標(biāo)物的檢測(cè)和分類,從而達(dá)到水下多目標(biāo)檢測(cè)分類的最好水平。
國(guó)內(nèi)的研究主要是海洋科學(xué)領(lǐng)域,比如漁場(chǎng)監(jiān)控任務(wù),通過(guò)視頻采集技術(shù)借助深度學(xué)習(xí)理論對(duì)海洋生態(tài)系統(tǒng)進(jìn)行無(wú)干擾監(jiān)控和測(cè)量。Li等[10-11]利用深度卷積神經(jīng)網(wǎng)絡(luò)對(duì)水下自由游動(dòng)的魚(yú)類進(jìn)行了準(zhǔn)確的檢測(cè)與分類,實(shí)現(xiàn)了無(wú)干擾情況下對(duì)海洋生態(tài)的監(jiān)測(cè)與調(diào)查研究,但其使用的網(wǎng)絡(luò)結(jié)構(gòu)并非真正意義上的深度網(wǎng)絡(luò),此外可用的數(shù)據(jù)量需足夠大。同時(shí),國(guó)內(nèi)對(duì)聲吶圖像進(jìn)行深度識(shí)別也在嘗試中,Zhu等[12]利用深度卷積神經(jīng)網(wǎng)絡(luò)對(duì)聲吶圖像進(jìn)行特征提取,再通過(guò)支持向量機(jī)(support vector machine,SVM)進(jìn)行分類任務(wù),試驗(yàn)結(jié)果表明效果優(yōu)于傳統(tǒng)方向梯度直方圖(his togram of oriented gradient,HOG)方法。王強(qiáng)等[13]將卷積神經(jīng)網(wǎng)絡(luò)用于水下3類實(shí)測(cè)目標(biāo)噪聲數(shù)據(jù)的分類識(shí)別,并與傳統(tǒng)的SVM方法對(duì)比,可知2種方法所得結(jié)果比較接近。但以上研究存在以下問(wèn)題:一是將深度學(xué)習(xí)用于水下目標(biāo)識(shí)別方法尚不成熟,國(guó)內(nèi)外的研究都是將其作為應(yīng)用于水下的一種新嘗試,尚無(wú)完整的框架或理論;二是國(guó)內(nèi)外在聲目標(biāo)方面研究較多,但相關(guān)水下光視覺(jué)圖像的深度學(xué)習(xí)智能識(shí)別算法研究較少。針對(duì)以上問(wèn)題,文中從水下光視覺(jué)圖像出發(fā),提出了一套水下光視覺(jué)圖像智能識(shí)別框架并進(jìn)行了仿真驗(yàn)證,結(jié)果表明,在特定測(cè)試集下提出的水下目標(biāo)智能識(shí)別方法在識(shí)別效果與自動(dòng)化程度方面相比傳統(tǒng)識(shí)別算法具有明顯優(yōu)勢(shì)。
1 水下圖像預(yù)處理
1.1 圖像濾波去噪
水下光學(xué)圖像相比水上光學(xué)圖像具有更高的椒鹽噪聲,文中先使用基于空域的中值濾波(median filter)進(jìn)行圖像去噪處理,該方法對(duì)于非線性信號(hào)的處理有很好的效果,運(yùn)算快,效率高,中值濾波去噪原理如下。
1)中值輸出:假定數(shù)組x1,x2,…,xn,并從大到小將這n個(gè)數(shù)值依次排列

數(shù)組x1,x2,…,xn的中值為
2)濾波窗口:一維情況下可直接用y代替濾波窗口的中心值。但因圖像為二維,故需將窗口擴(kuò)展到二維,用二維數(shù)組來(lái)表示數(shù)字圖像中各點(diǎn)的灰度值,因此濾波窗口為二維的中值濾波定義為

3)窗口尺寸:對(duì)于實(shí)際問(wèn)題,不同的圖像常常需要使用不同形狀和大小的窗口來(lái)處理。二維中值濾波的窗口形狀有很多種,根據(jù)圖像的不同,窗口形狀也大相徑庭。經(jīng)過(guò)多次試驗(yàn)發(fā)現(xiàn),文中窗口尺寸選擇為5×5比較合適。
1.2 圖像局部增強(qiáng)
水下拍攝時(shí),光的散射會(huì)對(duì)水下圖像產(chǎn)生很大影響,此外湍流、氣泡和浮游生物等隨機(jī)因素也會(huì)影響水下圖像的質(zhì)量。水下圖像局部增強(qiáng)是指通過(guò)提高圖像對(duì)比度、亮度及清晰度等,增加圖像視覺(jué)效果,增強(qiáng)圖像質(zhì)量。對(duì)比度有限的自適應(yīng)直方圖均衡(contrast limited adaptive histogram equalization,CLAHE)算法[14]是直方圖均衡化(HE)算法和自適應(yīng)直方圖均衡(AHE)算法的集成與改進(jìn),水下圖像局部增強(qiáng)效果較好,因此,文中使用CLAHE算法對(duì)圖像進(jìn)行局部增強(qiáng)處理,為后續(xù)的智能識(shí)別做鋪墊。
2 水下目標(biāo)智能識(shí)別方法
2.1 水下圖像智能識(shí)別原理
水下圖像智能識(shí)別的核心是深度學(xué)習(xí)算法,文中使用的是深度卷積神經(jīng)網(wǎng)絡(luò)。深度學(xué)習(xí)已在陸上圖像識(shí)別領(lǐng)域快速發(fā)展,各種人工智能(artificial intelligence,AI)應(yīng)用紛紛落地,技術(shù)的快速發(fā)展既取決于深度學(xué)習(xí)理論的不斷發(fā)展,也得益于各個(gè)領(lǐng)域數(shù)據(jù)的常年積累,出現(xiàn)了各種各樣的大數(shù)據(jù)集。目前大部分 AI在某種層面上可以說(shuō)是一種數(shù)據(jù)驅(qū)動(dòng)型算法。而水下圖像雖然種類多,但單一圖像數(shù)據(jù)量少,普遍存在數(shù)據(jù)集不足的情況。為了解決這一問(wèn)題,提出使用遷移學(xué)習(xí)(transfer learning,TL)和數(shù)據(jù)增強(qiáng)技術(shù)防止產(chǎn)生少量數(shù)據(jù)集過(guò)擬合效應(yīng)。其中,TL的目標(biāo)是將從一個(gè)環(huán)境中學(xué)到的知識(shí)用來(lái)幫助新環(huán)境中的學(xué)習(xí)任務(wù)[15-16],其提供了一種解決數(shù)據(jù)不足問(wèn)題的新方法,允許遷移已有的知識(shí)來(lái)解決目標(biāo)領(lǐng)域中僅有少量已標(biāo)注樣本數(shù)據(jù)的學(xué)習(xí)問(wèn)題,也就是運(yùn)用已有的知識(shí)對(duì)不同但相關(guān)領(lǐng)域問(wèn)題進(jìn)行求解。遷移學(xué)習(xí)可以定義為:給定一個(gè)源領(lǐng)域DS和學(xué)習(xí)任務(wù)TS,一個(gè)目標(biāo)領(lǐng)域DT和學(xué)習(xí)任務(wù)TT,其中DS≠DT和TS≠TT,遷移學(xué)習(xí)的目的是使用DS和TS中的已有知識(shí),幫助提高目標(biāo)領(lǐng)域DT中目標(biāo)預(yù)測(cè)函數(shù)fT(.)的學(xué)習(xí)[17-18]。數(shù)據(jù)增強(qiáng)是對(duì)數(shù)據(jù)進(jìn)行隨機(jī)上下左右翻轉(zhuǎn)、顏色、光照變換和多尺度變換,可以有效增加水下數(shù)據(jù)集的數(shù)量。
2.2 水下圖像智能識(shí)別框架
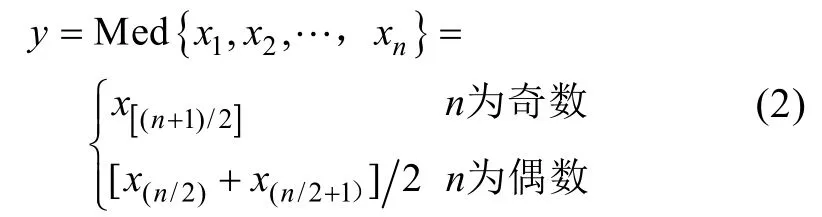
水下識(shí)別框架分為 2個(gè)部分,一是 Cifar-10數(shù)據(jù)集訓(xùn)練設(shè)計(jì)好的深度卷積神經(jīng)網(wǎng)絡(luò);二是權(quán)值遷移,增加一個(gè)全連接層并按分類結(jié)果改變輸出神經(jīng)元個(gè)數(shù),進(jìn)行水下圖像二次訓(xùn)練并識(shí)別。水下圖像智能識(shí)別框架如圖1所示。
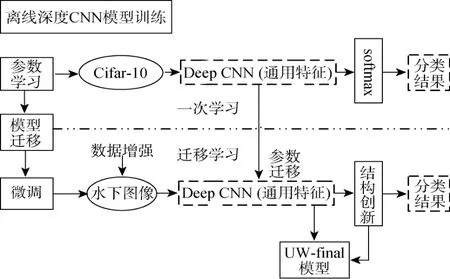
圖1 水下圖像智能識(shí)別框架Fig.1 Intelligent recognition framework of underwater images
2.3 深度卷積神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)方法
水下深度神經(jīng)網(wǎng)絡(luò)框架使用 TensorFlow進(jìn)行設(shè)計(jì),TensorFlow是一種采用數(shù)據(jù)流圖用于數(shù)值計(jì)算的開(kāi)源庫(kù),其計(jì)算通過(guò)“節(jié)點(diǎn)”和“線”來(lái)描述。
深度神經(jīng)網(wǎng)絡(luò)最顯著的特點(diǎn)在于網(wǎng)絡(luò)中可用于學(xué)習(xí)的參數(shù)量相比傳統(tǒng)神經(jīng)網(wǎng)絡(luò)成倍劇增,更多的參數(shù)意味著更強(qiáng)的學(xué)習(xí)能力,也意味著更大的學(xué)習(xí)量。水下深度神經(jīng)網(wǎng)絡(luò)的設(shè)計(jì)思想借鑒牛津大學(xué)視覺(jué)幾何組網(wǎng)絡(luò)(visual geometry group net,VGGNet)。因此,硬件計(jì)算能力和網(wǎng)絡(luò)學(xué)習(xí)所需樣本量也成倍劇增達(dá)到與之相匹配的程度,在深度網(wǎng)絡(luò)中樣本不足會(huì)導(dǎo)致明顯的過(guò)擬合效應(yīng)。對(duì)于特征提取能力強(qiáng)的卷積網(wǎng)絡(luò),網(wǎng)絡(luò)深度的增加體現(xiàn)在卷積核的驟增,而實(shí)際操作中可以在某一層上增加卷積核個(gè)數(shù)即增加網(wǎng)絡(luò)寬度,也可以通過(guò)增加網(wǎng)絡(luò)層數(shù)來(lái)增加卷積核個(gè)數(shù),即增加網(wǎng)絡(luò)深度。由于卷積核按照局部感受野提取特征,一個(gè)卷積核提取一種相應(yīng)特征,增加網(wǎng)絡(luò)寬度能在一定程度上提高特征提取的能力,但只在寬度上進(jìn)行擴(kuò)展,特征量雖多但是比較具體,如點(diǎn)、線和邊等具體特征,而卷積層之間的映射相當(dāng)于特征之間的融合,隨著深度的擴(kuò)展,底層特征經(jīng)過(guò)逐層映射,特征越來(lái)越抽象,更利于目標(biāo)的識(shí)別。因此,深度卷積神經(jīng)網(wǎng)絡(luò)(deep convolutional neural networks,DCNN)的設(shè)計(jì)原則應(yīng)遵循深度擴(kuò)展優(yōu)于寬度擴(kuò)展,同時(shí)增加每層寬度的原則。
卷積核大小的增加只是深度卷積的一個(gè)方面,卷積核的尺寸對(duì)網(wǎng)絡(luò)的特征提取能力也有著重要的影響,傳統(tǒng)DCNN中常用的卷積尺寸有5×5、7×7等,不同尺寸的卷積核在不同的問(wèn)題上有不一樣的識(shí)別效果。隨著網(wǎng)絡(luò)深度和卷積核個(gè)數(shù)的增加,小尺寸卷積核更適用于深度網(wǎng)絡(luò),因?yàn)?1個(gè)5×5的感受野等于2個(gè)3×3感受野,如圖2所示。因此,1個(gè)5×5的卷積層可以被2個(gè)3×3的卷積層替代,網(wǎng)絡(luò)信息傳遞一樣的情況下網(wǎng)絡(luò)的非線性得到增強(qiáng),同時(shí)降低了網(wǎng)絡(luò)參數(shù),類似的7×7的卷積層可以被3個(gè)3×3的卷積層代替。
圖2 感受野等價(jià)圖Fig.2 Equivalent graphs of receptive field
DCNN的另一個(gè)特殊結(jié)構(gòu)是池化層,其作用主要是降低特征圖大小來(lái)簡(jiǎn)化網(wǎng)絡(luò)計(jì)算復(fù)雜度和進(jìn)行特征壓縮來(lái)提取主要特征。實(shí)際工程經(jīng)驗(yàn)表明,池化層緊跟卷積層效果比較好,平均池化和最大值池化最常用,二者無(wú)顯著差別。
DCNN在數(shù)據(jù)量不匹配時(shí)容易出現(xiàn)過(guò)擬合效應(yīng),采用Dropout策略和L1、L2正則化能在一定程度上降低深度網(wǎng)絡(luò)的過(guò)擬合效應(yīng)。此外,DCNN由于網(wǎng)絡(luò)參數(shù)的驟增和樣本分布的差異性易導(dǎo)致網(wǎng)絡(luò)難以訓(xùn)練,采用批歸一化(batch normalization,BN)方法能加快網(wǎng)絡(luò)的收斂性。
綜上所述,水下深度神經(jīng)網(wǎng)絡(luò)的設(shè)計(jì)過(guò)程遵循優(yōu)先進(jìn)行深度擴(kuò)展,即增加卷積核的層數(shù),其次進(jìn)行寬度擴(kuò)展,即增加各層的卷積核個(gè)數(shù)。卷積核尺寸優(yōu)先選擇小尺寸,如 3×3。數(shù)據(jù)集足夠的情況下可以考慮增加 1×1卷積核來(lái)增強(qiáng)網(wǎng)絡(luò)的非線性,以便獲得更好的學(xué)習(xí)特征。深度網(wǎng)絡(luò)設(shè)計(jì)的優(yōu)劣以網(wǎng)絡(luò)深度增加過(guò)程中一次訓(xùn)練識(shí)別率的高低為基準(zhǔn),然后進(jìn)行二次遷移學(xué)習(xí),以最終的目標(biāo)識(shí)別率為評(píng)價(jià)標(biāo)準(zhǔn)。
2.4 試驗(yàn)驗(yàn)證
采用 Cifar-10作為源領(lǐng)域數(shù)據(jù)集,共 60 000張32×32彩色圖片,分為10個(gè)類別,其中50 000張訓(xùn)練圖片,10 000張測(cè)試圖片,如圖3所示。目標(biāo)領(lǐng)域數(shù)據(jù)集是5類不同水下魚(yú)類資源實(shí)時(shí)視頻,分別是鼻魚(yú)、豆娘魚(yú)、蝴蝶魚(yú)、刺尾鯛和立旗鯛,資源來(lái)自于臺(tái)灣魚(yú)類資料庫(kù),實(shí)際過(guò)程將視頻按幀截取為靜態(tài)圖片,為了保持樣本平衡,每一類截取300張訓(xùn)練圖片,100張測(cè)試圖片,訓(xùn)練圖片經(jīng)過(guò)隨機(jī)翻轉(zhuǎn)、縮放及對(duì)比度增強(qiáng)等數(shù)據(jù)增強(qiáng)手段得到大量擴(kuò)充。原始采集的視頻圖像如圖4所示。
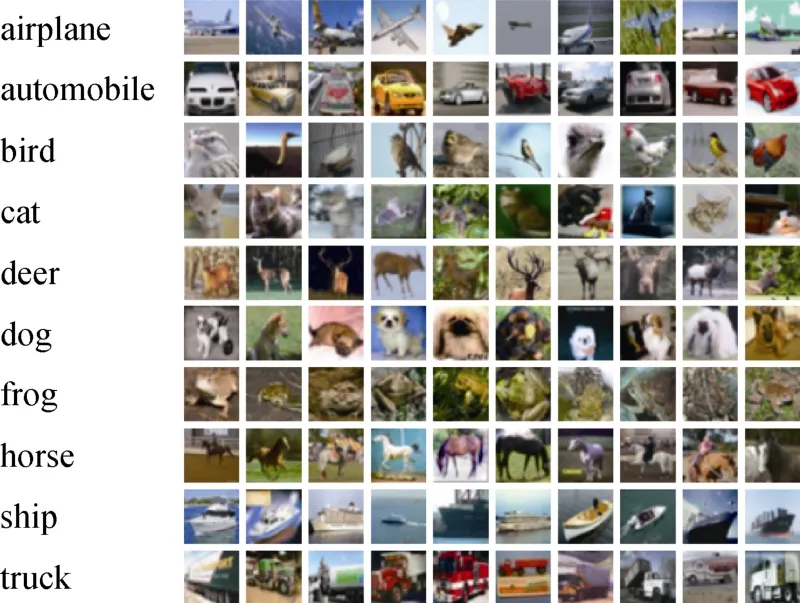
圖3 源領(lǐng)域數(shù)據(jù)集(Cifar-10)Fig.3 Dataset in source domain(Cifar-10)
首先對(duì)上述目標(biāo)領(lǐng)域數(shù)據(jù)集進(jìn)行圖像濾波和局部增強(qiáng)預(yù)處理,將其作為二次遷移訓(xùn)練的輸入數(shù)據(jù)。按照3.3節(jié)的設(shè)計(jì)原則進(jìn)行網(wǎng)絡(luò)設(shè)計(jì),同時(shí)水下目標(biāo)識(shí)別初始模型應(yīng)該與Cifar-10數(shù)據(jù)集相匹配,隨著網(wǎng)絡(luò)層數(shù)的遞增,Cifar-10訓(xùn)練集準(zhǔn)確率逐漸增加,當(dāng)超過(guò)網(wǎng)絡(luò)10層后訓(xùn)練準(zhǔn)確率達(dá)到100%,并不再變動(dòng),出現(xiàn)了過(guò)擬合現(xiàn)象。為了防止過(guò)擬合,水下目標(biāo)識(shí)別初始模型層數(shù)設(shè)計(jì)為10層。一次訓(xùn)練過(guò)程中DCNN結(jié)構(gòu)如表1所示。
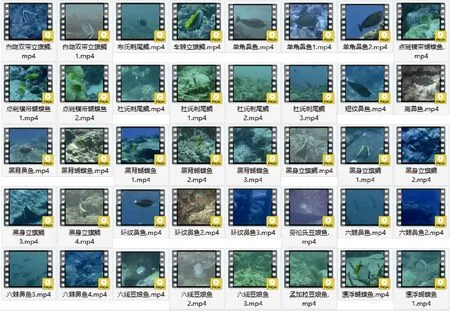
圖4 目標(biāo)領(lǐng)域數(shù)據(jù)集(5類)Fig.4 Dataset in target domain(five categories)
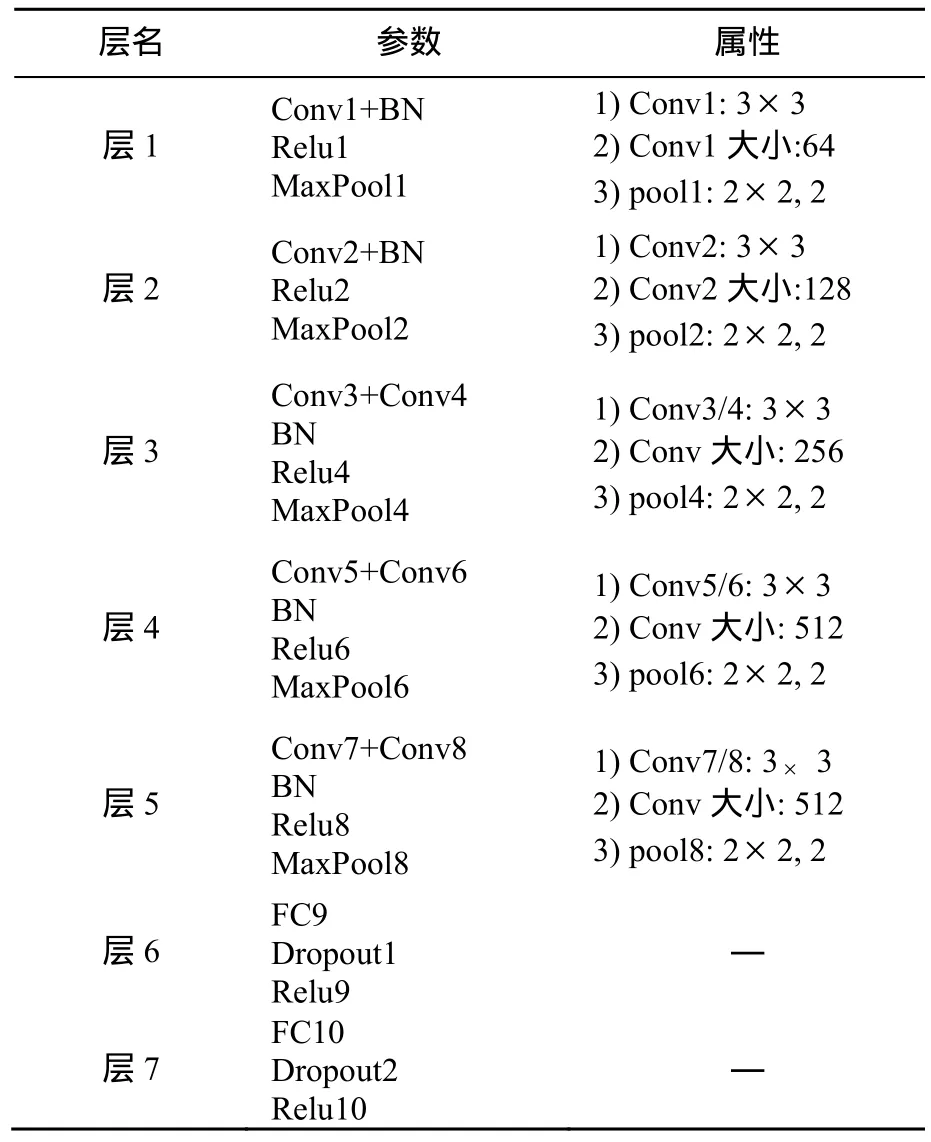
表1 深度卷積神經(jīng)網(wǎng)絡(luò)參數(shù)列表Table 1 Parameter list of deep convolution neural network (DCNN)
使用源領(lǐng)域數(shù)據(jù)集訓(xùn)練10層DCNN,實(shí)際操作中迭代次數(shù)越長(zhǎng)效果越好,使用Relu激活函數(shù)收斂性最快,但是效果不一定最好,相反傳統(tǒng)的Tanh激活函數(shù)在更長(zhǎng)的迭代次數(shù)下訓(xùn)練效果更好但不容易收斂,二者各有優(yōu)勢(shì)。試驗(yàn)中迭代次數(shù)為 1萬(wàn)次時(shí)損失值不再顯著變化終止訓(xùn)練,預(yù)訓(xùn)練完成,將網(wǎng)絡(luò)權(quán)重和模型進(jìn)行遷移,增加一個(gè)全連接層用于目標(biāo)識(shí)別,根據(jù)識(shí)別目標(biāo)種類的多少將輸出神經(jīng)元由10個(gè)改為5個(gè),目標(biāo)領(lǐng)域訓(xùn)練集按批進(jìn)行數(shù)據(jù)增強(qiáng)后輸入DCNN進(jìn)行訓(xùn)練。為了加快訓(xùn)練速度,訓(xùn)練過(guò)程中每迭代 100次進(jìn)行 1次日志記錄,訓(xùn)練過(guò)程中部分可視化結(jié)果如圖5~圖7所示。圖中,最大值和最小值分別指網(wǎng)絡(luò)中間層的最大和最小輸出值。
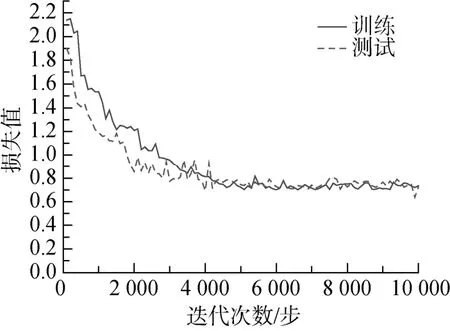
圖5 訓(xùn)練過(guò)程誤差損失函數(shù)變化曲線Fig.5 Curves of error loss function in training process
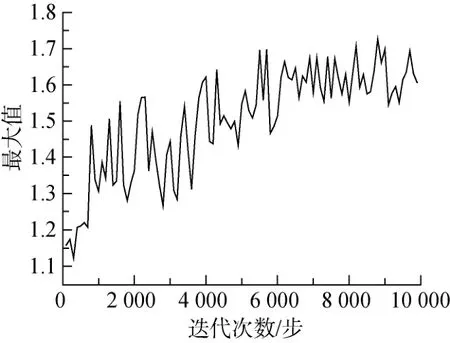
圖6 訓(xùn)練過(guò)程卷積層3最大輸出值變化量Fig.6 Maximum output value change of convolution layer 3 in training process
圖7 訓(xùn)練過(guò)程卷積層3最小輸出值變化量Fig.7 Minimum output value change of convolution layer 3 in training process
圖 5是訓(xùn)練過(guò)程中誤差損失函數(shù)變化趨勢(shì),圖6和圖7是訓(xùn)練過(guò)程中任意選擇的網(wǎng)絡(luò)層(試驗(yàn)隨機(jī)選擇為第3層)的最大權(quán)重和最小權(quán)重的變化過(guò)程,由圖 5~圖 7可發(fā)現(xiàn),隨著迭代次數(shù)的增加,訓(xùn)練集和測(cè)試集的損失函數(shù)都呈現(xiàn)明顯的下降趨勢(shì)并且損失值在5 000步左右開(kāi)始穩(wěn)定,證明網(wǎng)絡(luò)訓(xùn)練效果好,同時(shí)隨機(jī)抽取的第 3層網(wǎng)絡(luò)的最大輸出值趨于波動(dòng)上升中,證明權(quán)重得到有效更新,進(jìn)一步佐證了網(wǎng)絡(luò)訓(xùn)練的有效性,同時(shí)由于網(wǎng)絡(luò)使用了relu激活函數(shù),最小輸出值一直維持為0。為驗(yàn)證識(shí)別效果,同時(shí)將提出的水下圖像智能識(shí)別方法與傳統(tǒng) HOG、尺度不變特征轉(zhuǎn)換(scaleinvariant feature transform,SIFT)算法進(jìn)行粗略比較,HOG在60%左右,SIFT在62%左右,水下圖像智能識(shí)別方法準(zhǔn)確率在 78%左右,準(zhǔn)確率明顯提高,可見(jiàn)基于深度卷積特征的智能識(shí)別方法在識(shí)別效果與自動(dòng)化程度方面都具有明顯的優(yōu)勢(shì)。
3 結(jié)束語(yǔ)
采用深度學(xué)習(xí)方法對(duì)水下圖像進(jìn)行智能識(shí)別,提高了UUV在“看”方面的智能化水平,對(duì)UUV的智能化發(fā)展有著重大的意義,同時(shí)在軍民融合的時(shí)代背景下,促進(jìn)了UUV的多用途化。
文中針對(duì)水下圖像高噪聲、低對(duì)比度的特點(diǎn),先進(jìn)行水下圖像預(yù)處理,面對(duì)水下數(shù)據(jù)集不足的情況,提出了遷移學(xué)習(xí)與數(shù)據(jù)增強(qiáng)方法,試驗(yàn)驗(yàn)證了水下智能識(shí)別方法的有效性,在一定程度上優(yōu)于傳統(tǒng)的水下圖像識(shí)別算法,但是提出的識(shí)別方法在準(zhǔn)確率上還有很大上升空間,這是一次水下圖像智能識(shí)別的嶄新嘗試,而尋求更長(zhǎng)的訓(xùn)練時(shí)間,更多的水下數(shù)據(jù),更加平衡的樣本都將在工程意義上提高水下智能識(shí)別方法的準(zhǔn)確率,這也是未來(lái)研究的主要目標(biāo)。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
表面工程與再制造(2019年6期)2019-08-24 06:40:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46