遠程誘騙型UUV掩護潛艇作戰效能建模與仿真
2019-07-16 06:17:00劉海光
水下無人系統學報 2019年3期
劉海光,李 偉,張 永
(海軍潛艇學院 導彈兵器系,山東 青島,266199)
0 引言
遠程誘騙型無人水下航行器(unmanned undersea vehicle,UUV)是一種主動使用,自主工作,通過模擬潛艇特性,誘騙反潛飛機、水下監聽系統等反潛兵力及裝備,以掩護或協同潛艇作戰,提升體系作戰能力的新型水下信息戰武器。其與現有自航式誘餌在使命任務、作戰范圍、指控模式等方面存在顯著區別[1-2]。現有自航式聲誘餌主要誘騙水下來襲魚雷,一般以誘騙成功概率為其效能評價指標,其效能分析一般方法為:通過構建誘餌與來襲魚雷相對運動模型,基于誘餌性能,研究在不同態勢情況下誘餌對來襲魚雷的誘騙概率[3-5]。
遠程誘騙型 UUV作戰目的是為提升體系作戰能力,其作戰對象為敵各種反潛平臺,評價其作戰效能應將其納入作戰體系中,不單考慮其對反潛兵力的誘騙成功概率,更應從作戰整體考慮其所掩護潛艇作戰任務的達成,因此,現有自航式聲誘餌的效能分析方法不適用于遠程誘騙型UUV。目前針對遠程誘騙型UUV作戰效能方面的研究較少,文獻[6]依據現有經驗,分析遠程誘餌對敵反潛體系的影響,應用權重分析法比較了使用與不使用遠程誘餌 2種情況下潛艇突破封鎖的概率變化,該方法對經驗數據依賴大,相關經驗數據獲取相對困難,甚至無法獲取,一定程度上限制了該方法的應用。文中結合遠程誘騙型UUV掩護潛艇作戰的過程及目的,提出遠程誘騙型UUV對抗反潛兵力作戰效能指標,以反潛兵力搜索發現目標概率模型為基礎,建立多枚誘餌誘騙反潛兵力的誘騙概率及牽制時間模型,構建典型作戰想定模型,仿真分析其在掩護潛艇作戰中的作戰效能,給出作戰效能影響因素。
1 掩護潛艇作戰效能指標選取
遠程誘騙型 UUV可以主動使用,實施大縱深遠程機動,通過干擾、欺騙等手段與敵反潛平臺進行信息對抗,擾亂敵海上偵察特別是反潛探測體系,調動消耗反潛兵力,從戰役層面協同掩護主要兵力(如潛艇)完成作戰任務,其從作戰意圖、作戰時間和作戰空間等方面具有作戰平臺屬性。遠程誘騙型 UUV掩護潛艇作戰的基本過程為:通過模擬潛艇特性,隱真示假,在一定時間內將敵反潛兵力誘騙至遠離己方潛艇所處海域,保證己方潛艇兵力安全突破敵封鎖區,以達成作戰目的。
這種情況下評估遠程誘騙型 UUV的作戰效能,不但要考慮其對敵反潛兵力的誘騙概率,更應從作戰體系整體來考慮潛艇突破成功率,因此,應選取潛艇突破封鎖區成功概率作為遠程誘騙型UUV掩護潛艇作戰效能評價指標。
2 誘騙反潛兵力作戰效能模型
2.1 單枚誘騙型UUV誘騙反潛機
由反潛巡邏機反潛工作方式可知,在反潛巡邏機巡邏搜索模式下,主要靠雷達搜索目標,反潛巡邏機對目標的搜索發現概率與遠程誘騙型UUV誘騙反潛巡邏機的成功概率屬于對同一事物不同側面的描述[7-8]。遠程誘騙型UUV在一定海域均勻分布時,其成功誘騙反潛巡邏機的概率按下式計算[9-10]

式中:S1為反潛巡邏機單位時間內搜索面積;ts為反潛巡邏機搜索時間;S∑為須搜索的海域面積;Pj為雷達探測信號接觸目標概率;dld為雷達發現目標距離;Vss為反潛巡邏機搜索速度。
反潛巡邏機使用雷達搜索發現目標時,遠程誘騙型 UUV可監測到反潛巡邏機信號,并模擬潛艇實施下潛規避。考慮到遠程誘騙型 UUV目標特性較小,反潛巡邏機很難通過雷達信號確定目標準確位置,隨即使用聲吶浮標確定目標位置,此時目標概略位置已知,使用浮標成功發現目標概率可按下式計算[8,11]

式中:dfb為浮標有效作用距離;Vm為目標速度;nfb為浮標數量;Pjs為能接觸到并能識別的概率;Sd為使用浮標搜索面積;tss為反潛巡邏機使用浮標搜索時間;R0為巡邏開始時目標所處圓的半徑。
使用雷達與使用浮標是 2個連續的過程,無論使用浮標探測結果如何,從作戰效果來說遠程誘騙型 UUV已經成功完成了一次誘騙。因此首次誘騙成功概率P1只與誘騙雷達成功率有關,即可計算為

反潛巡邏機在使用浮標探測目標時,一般會使用主動聲吶浮標。當遠程誘騙型 UUV探測到主動聲吶浮標信號后,會降低甚至關閉模擬信號并采用戰術動作實現匿跡,使得反潛巡邏機丟失目標信號。遠程誘騙型UUV在判斷為成功擺脫反潛巡邏機后,會再次開啟模擬信號,以便讓反潛巡邏機再次發現,如此反復。反潛巡邏機丟失目標后,往往會再次使用浮標搜索,再次搜索發現概率可按式(3)計算。
從遠程誘騙型 UUV被反潛巡邏機雷達發現,到反潛巡邏機使用完一次浮標陣的過程稱為遠程誘騙型 UUV的一個戰術對抗周期Td。戰術對抗周期也就是誘騙型 UUV對反潛兵力的牽制時間,由于反潛巡邏機的機動性很強,一個戰術對抗周期的時間主要是布放浮標并進行目標探測的時間。假設在不同對抗周期內反潛巡邏機有效識別假目標的概率相等且為Psb,則反潛巡邏機對目標進行再次搜索的可能性可定為1-Psb,則連續2次誘騙概率為

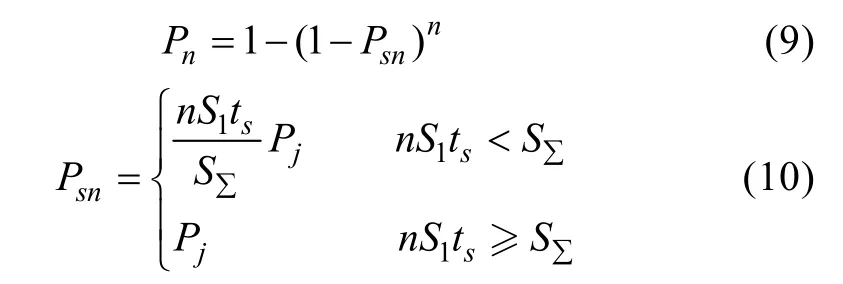
由此可以得到連續n次成功誘騙的概率為

遠程誘騙型 UUV與反潛巡邏機一次對抗過程一般會經歷若干個對抗周期。在假定每次使用浮標陣時間相同的情況下,則實施k次誘騙的牽制反潛巡邏機時間是kTd,假定一架反潛巡邏機最多使用浮標聲吶的次數為 4次,在反潛巡邏機航程滿足要求的情況下,針對一架反潛巡邏機的一次任務中,單枚遠程誘騙型 UUV對反潛巡邏機平均牽制時間

2.2 多枚遠程誘騙型UUV誘騙反潛巡邏機
使用多枚遠程誘騙型UUV對反潛巡邏機實施誘騙時,為增大誘騙成功概率,多枚遠程誘騙型UUV在同一海域平均分布,且間距較大,不會發生2枚以上遠程誘騙型UUV被同時發現,且遠程誘騙型UUV間完全獨立,至少有1枚遠程誘騙型UUV被雷達發現的概率可按下式計算
式中:n為使用遠程誘騙型UUV的數量;Psn為使用雷達發現遠程誘騙型UUV的概率。
在遠程誘騙型 UUV的間隔大于浮標與反潛巡邏機通信距離的情況下,不會發生 2枚以上遠程誘騙型 UUV被同時定位,通過以上分析可知,發生1枚遠程誘騙型UUV被成功定位的概率

依據單枚遠程誘騙型 UUV的情況分析,則使用n枚遠程誘騙型UUV時,首次誘騙反潛巡邏機成功概率為

在遠程誘騙型 UUV技術狀態不變或相同環境下,連續k次誘騙成功后的牽制時間是kTd,假設敵反潛巡邏機每次有效識別假目標的概率為Psb。反潛巡邏機在判斷為假目標后,放棄使用浮標聲吶搜索,繼續使用雷達搜索,假定反潛巡邏機使用浮標定位搜索的次數最大為 4次,平均牽制時間Tk平均有表1所示的8種情況,其中L表示使用雷達搜索,F表示使用浮標搜索,出現概率表示當前情況發生的概率。
2.3 遠程誘騙型UUV誘騙水下監聽系統
根據現有資料分析,在一定的海洋環境下,水下監聽系統對處于其作用范圍內的目標發現概率是時間的函數,時間越長發現概率越大[12],文中只考慮時間對發現概率的影響,假定發現概率與目標處于有效范圍的時間成正比,在單位時間內發現處于其作用區域的目標概率為a,則水下監聽系統發現目標概率
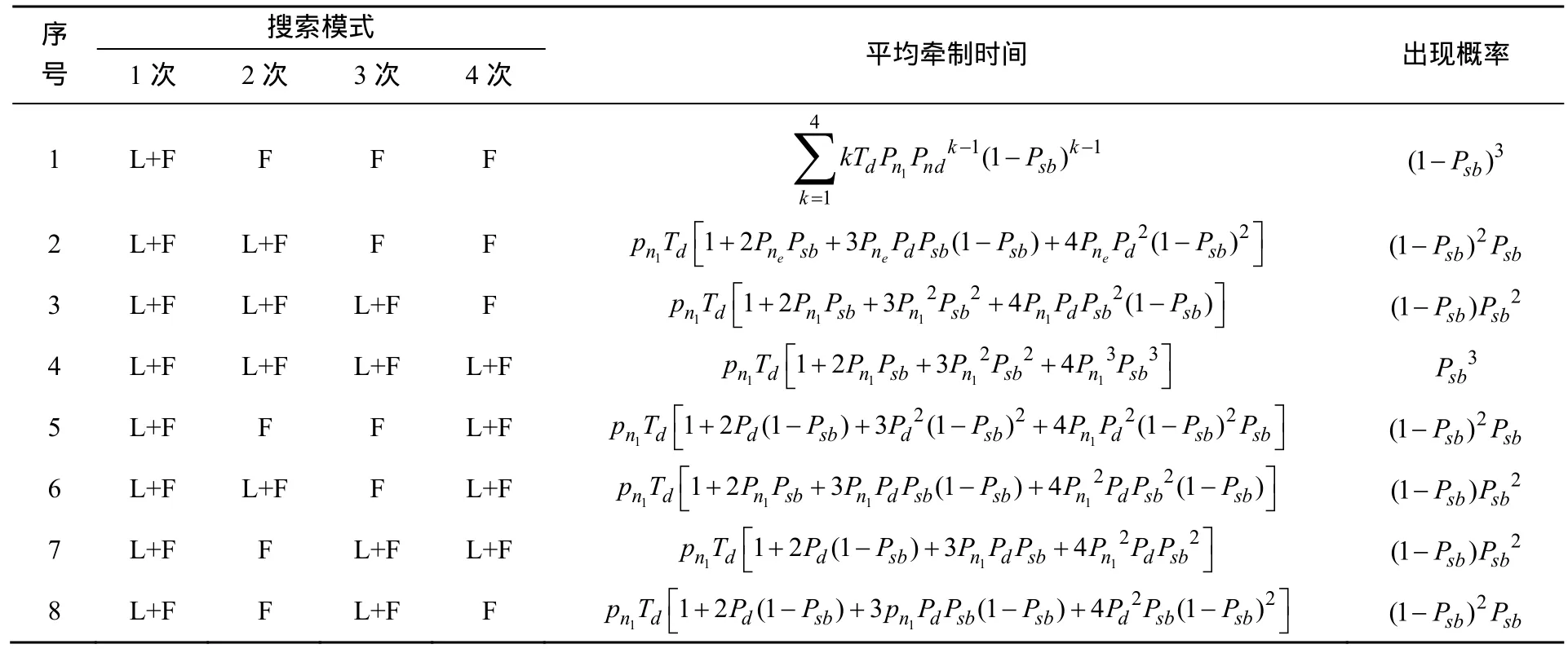
表1 多枚遠程誘騙型無人水下航行器平均牽制時間Table 1 Average diversion time of multiple long-range decoy unmanned undersea vehicles(UUVs)
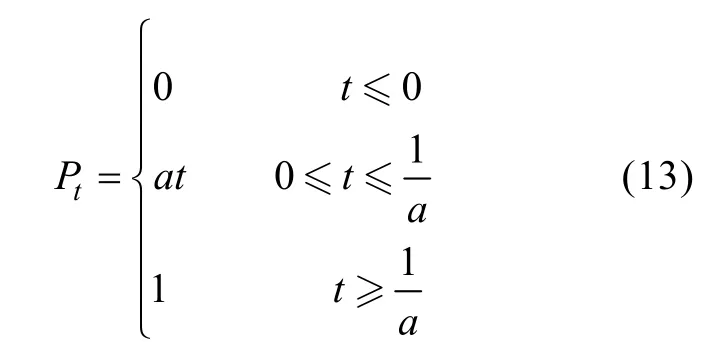
式中,t為遠程誘騙型UUV處于水下監聽系統有效作用區域的時間。
3 掩護潛艇作戰效能分析
3.1 作戰想定
作戰想定:如圖1所示,航道A、B為潛艇2條突破航道,敵方在航道外圍布設有水下監聽系統,同時反潛巡邏機沿航道外圍進行不間斷巡邏偵察。當監聽系統檢測到潛艇信號后,將信息傳遞給反潛巡邏機,反潛巡邏機隨即實施應召反潛。遠程誘騙型UUV規劃從A航道模擬潛艇通過,誘騙敵反潛巡邏機前往,與此同時潛艇擇機從B航道突破。
圖1 掩護潛艇想定圖Fig.1 Scenario sketch map of covering submarine
在沒有應召信息的情況下,反潛巡邏機沿著巡邏線飛行,并以自身發現目標信號為依據實施反潛。如果同時有 2個目標信息,反潛巡邏機采用就近原則實施反潛作業。反潛巡邏機在執行應召反潛任務的過程中,在判明當前目標性質之前,不再執行新的反潛任務。
潛艇突破水下監聽系統的距離大于1.5倍的反潛巡邏機發現距離后,沒有被反潛巡邏機發現,可以認為潛艇成功突破,在此之前若反潛巡邏機發現潛艇,則認定潛艇突破失敗。
反潛巡邏機沿南北長300 n mile航線直線往復搜索,巡邏線距離水下監聽系統15 n mile。反潛巡邏機巡航速度為 300 kn/h,雷達對遠程誘騙型UUV的最大發現距離為5 n mile,單個浮標作用距離為2 n mile。水下監聽系統對潛艇和遠程誘騙型UUV的有效作用距離為15 n mile。假定在1 h內水下監聽系統發現處于其作用區域的目標概率為 0.4,反潛飛機有效識別假目標的概率為0.3。
3.2 作戰想定建模
根據上述作戰想定,構建模型如圖2所示。
潛艇與遠程誘騙型UUV初始位置橫坐標為0,潛艇初始位置縱坐標在0~100 n mile隨機選取,遠程誘騙型UUV初始位置縱坐標在200~300 n mile隨機選取;潛艇及遠程誘騙型UUV航向與X軸夾角為0。當遠程誘騙型UUV橫坐標大于150 n mile時,開始誘騙反潛巡邏機。水下監聽系統陣列位置:X為150 n mile處,沿Y軸方向分布。每段長度100 n mile,2段間隔100 n mile。
反潛巡邏機巡邏線位置:X為165 n mile處,沿Y軸分布,航線長度為300 n mile。反潛巡邏機沿監聽陣外沿往返飛行,初始位置隨機確定。
3.3 仿真計算
1)使用單枚遠程誘騙型UUV協同突破
基于以上作戰想定及計算模型,使用單枚遠程誘騙型 UUV,在遠程誘騙型 UUV和潛艇選擇不同航速情況下,利用蒙特卡洛法進行仿真,潛艇突破成功概率與潛艇及遠程誘騙型 UUV航速的關系如圖3所示。
2)使用2枚遠程誘騙型UUV協助突破
為提高潛艇突破概率,模擬同時使用 2枚遠程誘騙型UUV實施誘騙,2枚遠程誘騙型 UUV起始點隨機分布,且間距大于反潛飛機的發現距離,兩誘餌縱坐標間距大于 2倍的反潛飛機發現距離,突破成功概率與潛艇及遠程誘騙型 UUV航速的關系如圖4所示。
圖3 突破概率與潛艇及單枚UUV航速關系Fig.3 Relations of breakthrough probability with speeds of submarine and single UUV
圖4 突破成功率與潛艇及2枚UUV航速關系Fig.4 Relations of breakthrough probability with speeds of submarine and two UUVs
3)防守相對不嚴密情況下的突破
將想定條件改變如下:2條監聽線長度改為200 n mile,間隔為200 n mile,敵反潛巡邏機航線長為600 n mile。潛艇初始位置縱坐標在0~200 n mile內隨機選取,遠程誘騙型 UUV初始位置縱坐標400~600 n mile內隨機選取。使用2枚遠程誘騙型 UUV,在其他條件不變情況下突破成功概率與潛艇及遠程誘騙型 UUV航速的關系如圖5所示。
圖5 防守不嚴密情況下突破概率與潛艇及2枚UUV航速關系Fig.5 Relations of breakthrough probability with speeds of submarine and two UUVs in the case of untight defense
3.4 結果分析
1)潛艇速度與遠程誘騙型 UUV速度差別較大時(相當于不使用遠程誘騙型 UUV)潛艇突破概率較低,在遠程誘騙型UUV掩護下,潛艇成功突破概率有了明顯提升。
2)使用單枚遠程誘騙型 UUV,由于牽制反潛巡邏機的時間相對較短,當潛艇速度和遠程誘騙型UUV速度相當時,即當遠程誘騙型UUV與潛艇幾乎同時到達封鎖線時,突破成功概率較高,而當潛艇速度小于或大于遠程誘騙型 UUV速度時,即當兩者不同時到達封鎖線時,突破成功率明顯下降,因此,這種情況下,遠程誘騙型 UUV和潛艇需要相互配合,實現幾乎同時通過封鎖區域,此時遠程誘騙型 UUV被發現后才能牽制敵反潛巡邏機,兩者到達水下監聽系統的時間差越大,潛艇突破成功率就越低。
3)使用 2枚遠程誘騙型 UUV,隨著牽制反潛巡邏機時間變大,突破成功概率明顯提高。突破概率的最高點集中在遠程誘騙型 UUV速度略高于潛艇速度情況下,表明當牽制時間變大時,可以讓遠程誘騙型 UUV首先達到封鎖區,將反潛巡邏機吸引到遠程誘騙型 UUV工作區,潛艇再擇機突破。因此在戰術使用時,可根據遠程誘騙型UUV使用數量決定突破戰術。
4)在敵防守嚴密的情況下,不使用遠程誘騙型UUV,潛艇成功突破的可能性較低。在敵防守不嚴密,潛艇單獨突破的成功概率較高時,在保證隱蔽性的情況下,潛艇應選擇以較高的速度突破。
5)在使用遠程誘騙型UUV掩護突破時,當遠程誘騙型UUV牽制反潛巡邏機時間小于潛艇突破反潛封鎖帶時間時,應讓遠程誘騙型 UUV與潛艇同時到達封鎖線;當遠程誘騙型UUV牽制反潛巡邏機時間大于潛艇突破反潛封鎖帶時間時,應讓遠程誘騙型 UUV先到達封鎖線,產生誘騙效果,潛艇再擇機突破,遠程誘騙型UUV牽制反潛巡邏機的平均時間相較潛艇突破反潛封鎖帶的時間越大,遠程誘騙型UUV先到達封鎖帶時間就可以越早;同時應盡可能加大潛艇的突破速度。
4 結束語
文中通過分析遠程誘騙型 UUV掩護潛艇作戰目的及過程,提出了遠程誘騙型 UUV掩護潛艇突破反潛封鎖作戰效能評價指標,建立了單枚及多枚遠程誘騙型 UUV誘騙不同反潛兵力概率模型和牽制時間模型,構建了遠程誘騙型 UUV協助潛艇突破反潛巡邏機與水下監聽系統所組成的反潛體系作戰效能模型。根據典型作戰想定,對使用遠程誘騙型 UUV掩護潛艇作戰進行了仿真,檢驗不同條件下潛艇突破成功概率,潛艇突破島鏈成功率與戰場環境、遠程誘騙型 UUV的使用數量、敵防守兵力、采用的突防戰術等因素有關,并提出了提升潛艇突破成功概率的方法和措施。仿真結果表明,所建模型對效能影響因素表達較為全面,對經驗數據依賴較少,具有較高的適用性。但是,文中只分析了反潛巡邏機、水下監聽系統2種反潛兵力聯合反潛情況下遠程誘騙型 UUV掩護潛艇突破封鎖的作戰效能,尚沒有研究遠程誘騙型 UUV誘騙反潛水面艦艇、反潛直升機等其他反潛兵力的作戰效能,有待進一步展開研究,便使研究結論更具普遍性,更符合戰場實際。
相關文章導航
1.鄧新文,朱文振,謝勇.潛艇轉向旋回防御主動聲自導魚雷的戰術意義與作戰運用[J].水下無人系統學報,2019,27(1).
2.楊智棟,李榮融,蔡衛軍,等.國外水下預置武器發展及關鍵技術[J].水下無人系統學報,2018,26(6).
3.岳玲,樊書宏,馮西安.魚雷協同制導對水聲通信能力的需求分析[J].水下無人系統學報,2018,26(5).
4.鐘宏偉,李國良,宋林樺,等.國外大型無人水下航行器發展綜述[J].水下無人系統學報,2018,26(4).
5.李華,張靜.遠聲自導魚雷二次轉角作戰使用方法[J].水下無人系統學報,2018,26(4).
6.曹萌,倪文璽,蔣繼軍.反魚雷魚雷全彈道數學仿真系統設計與應用[J].水下無人系統學報,2018,26(3).
7.林龍信,張比升.水面無人作戰系統技術發展與作戰應用[J].水下無人系統學報,2018,26(2).
8.董金鑫,張東俊,張磊,等.UUV試驗評估組織執行體系構建與思考[J].水下無人系統學報,2018,26(1).
9.聶衛東,馬玲,張博,等.淺析美軍水下無人作戰系統及其關鍵技術[J].水下無人系統學報,2017,25(5).
10.鐘宏偉.國外無人水下航行器裝備與技術現狀及展望[J].水下無人系統學報,2017,25(4).
11.錢東,趙江,楊蕓.軍用UUV發展方向與趨勢(下)——美軍用無人系統發展規劃分析解讀[J].水下無人系統學報,2017,25(3).