基于聲對接耦合的水下高速航行器全彈道仿真測試方法
2019-07-16 06:16:54蔣繼軍康文鈺徐園園王明洲
水下無人系統學報 2019年3期
張 俊,蔣繼軍,康文鈺,徐園園,王明洲
(中國船舶重工集團公司 第705研究所,陜西 西安,710077)
0 引言
一般水下高速航行器根據需要可用于主動搜尋并攔截來襲目標,其技術要求高,研制難度大,因此驗證其性能指標的湖海實航試驗組織難度高、經費開銷大且時間周期長。同時,航行器在使用環境中,面臨著同一區域器材多、聲兼容問題突出和淺水強混響等復雜問題,僅僅利用湖海試驗難以實現某些邊界條件下的性能驗證。因此,為給水下高速航行器中目標檢測、攔截彈道設計、作戰使用等關鍵技術的解決和驗證提供有力的技術手段,驗證其作戰效能,建立相應的陸上半實物仿真環境,具有迫切的需求和重要的價值[1]。
水下高速航行器仿真通常分為數學仿真和半實物仿真。曹萌等[2]提出了一種水下高速航行器全彈道數學仿真系統,可較好地用于研究驗證水下高速航行器動作流程設計的合理性,優化性能參數設計。楊云川等[3-4]設計了一種基于消聲水罐聲學物理場的水下航行器制導半實物仿真系統。董曉恒等[5]設計了一種基于電注入方式的半實物仿真測試系統,實現了水下高速航行器自導系統電子組件的半實物仿真。直接水聲物理場耦合方式的半實仿真系統是能夠實現水下高速航行器真實使用環境的最直接仿真和測試,缺點是系統復雜、建設投資大和建設周期長。電子注入半實物仿真方式的硬件系統相對簡單,成本相對低,主要缺點是航行器自導聲學基陣不引入仿真系統,無法對航行器實現全系統測試考核。
基于聲對接耦合注入的半實物仿真測試系統采用對接基陣與水下高速航行器聲學裝置換能器一一對接,通過聲信號耦合的方式,完成航行器尋的信號回波的模擬,并結合航行器本身運動狀態的解算和模擬,實現水下全彈道仿真與測試。與其他方式相比,其特點是脫離消聲水罐或者水池等大型試驗設施的限制,將航行器聲學基陣納入仿真測試中,完整地對水下高速航行器進行總體考核,可形成小型化、可移動的仿真測試系統。在測試效果、研制成本、實施難度及水下高速航行器研制、試驗和作戰訓練需求等方面具有優勢。基于此,文中針對水下高速航行器陸上仿真測試,建立了基于聲對接陣的全彈道仿真測試系統,為水下高速航行器研制、效能評估和作戰使用提供支撐。
1 基于聲對接耦合的半實物仿真測試系統
1.1 功能組成
基于聲對接耦合的航行器半實物仿真測試系統主要實現功能如下。1)運行支持功能:包括產品供電、射前流程、運行參數設定等。2)物理效應模擬功能:水下高速航行器姿態和深度信息模擬,以及根據設定的環境參數、目標參數、目標態勢及自導發射信息的目標回波信號模擬。3)全彈道試驗支持功能:包括水下高速航行器攔截態勢設定、典型環境參數設定、試驗流程控制、試驗過程數據和狀態顯示監控、數據記錄分析等。
該系統包含顯控計算機、控制仿真機、目標及海洋環境實時生成裝置、聲對接裝置、程控衰減器和產品供電電源等部分,如圖1所示。
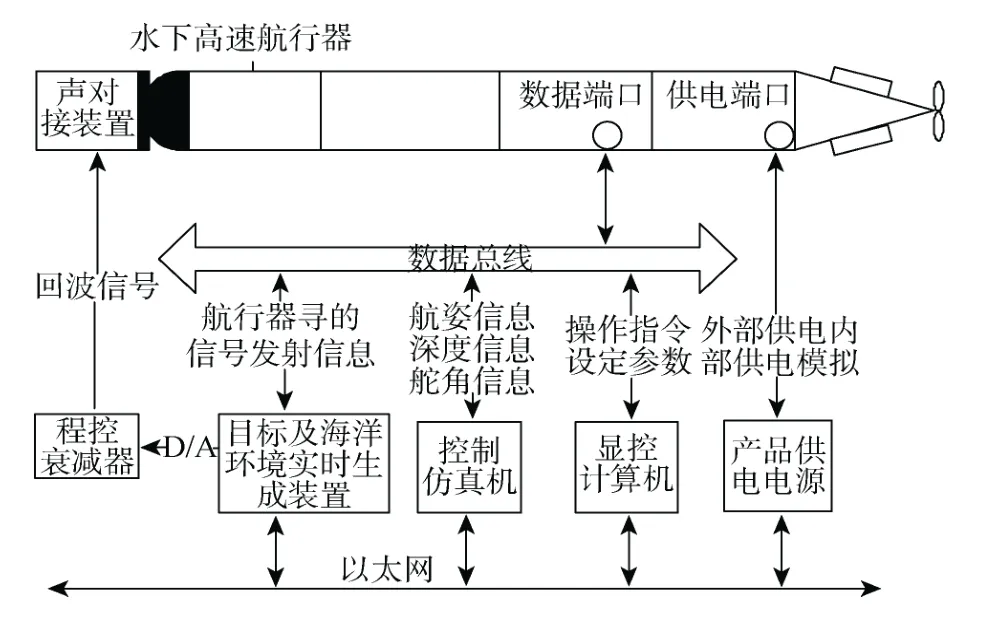
圖1 全彈道仿真測試系統組成Fig.1 Constitution of whole trajectory simulation test system
圖中:顯控計算機為系統的主控設備,完成試驗流/態勢、參數設定和試驗狀態顯示等功能;控制仿真機負責水下高速航行器運動學與動力學仿真,模擬航行姿態和深度;目標及海洋環境實時生成裝置對目標主被動回波和海洋環境噪聲進行模擬;程控衰減器實現目標回波強度動態范圍調整;聲對接裝置將模擬的回波信號和海洋環境噪聲信號按照水下高速航行器自導系統聲學基陣的分布規律,通過模擬海水聲阻抗特性的聲傳播介質,一一耦合作用于自導系統聲學裝置接收換能器;產品供電電源按照水下高速航行器供電時序實現電源供給。
1.2 工作流程
仿真測試開始時,先進行仿真測試系統設定。顯控計算機在各設備自檢正常后,向控制仿真機發送初始態勢參數、航行器參數、運動參數等與相對運動和對抗態勢相關的參數;向目標及海洋環境實時生成裝置發送水文參數、目標聲特性參數、噪聲參數等與目標檢測相關的目標和海洋環境參數。
仿真系統參數設定完成后進入水下高速航行器射前參數設定和流程階段,主要完成水下高速航行器狀態檢查、彈道參數設定、射前姿態初始化等。
待水下高速航行器反饋射前狀態完成后,顯控計算機發送“發射”指令,仿真運行開始。控制仿真機開始按照設定態勢和參數解算水下高速航行器、來襲目標、本艦的運動參數,模擬輸出水下高速航行器姿態信息和深度信息。目標及海洋環境實時生成裝置根據航行器與目標相對位置、水聲環境參數、尋的信號參數生成目標回波和環境噪聲信號,經程控衰減器強度控制和聲對接裝置電聲轉換后聲耦合到水下高速航行器聲學基陣。水下高速航行器根據仿真系統模擬的目標回波、姿態及深度對來襲目標進行檢測、跟蹤和攔截,完成一個全彈道機動過程。
2 聲對接耦合基陣
聲對接裝置是水下高速航行器全彈道仿真測試系統關鍵設備,主要功能是將仿真的陣元域電信號轉換為聲信號,以聲耦合方式為水下高速航行器自導系統聲學換能器提供一對一的物理激勵。由對接基陣、對接機構和聲匹配材料(透聲橡膠)等組成。
2.1 基陣設計
2.1.1 對接換能器
根據目標距離變化,聲對接換能器輸出聲信號,在能量上需滿足目標回波信號大動態范圍變化要求,同時盡可能減少由于聲耦合過程導致的通道間交叉耦合,提高通道獨立性。
在主動工作模式下,根據聲吶方程可以估算目標回聲級[6]

式中:SL為水下高速航行器聲學基陣發射聲源級;TS為目標強度;TL為聲波在海水中的傳播損失。
針對水下高速航行器使用要求計算可知,對接陣換能器輸出的目標回波信號動態范圍需要達到100 dB。
通常將聲對接換能器諧振頻率設計在遠離水下航行器工作頻段的高頻段上,這是因為:1)高頻換能器孔徑較小,有利于機械對準[7];2)高頻換能器在水下航行器常用的工作頻段內自身發送電壓響應曲線雖然不平坦,但隨頻率近似于線性增加,有利于在軟件上實現對發射信號的幅度補償,以達到較平坦的信號能量輸出;3)高頻換能器在非諧振點頻段電壓響應較低,但在聲對接的壓緊狀態下滿足目標回波能力輸出的要求,恰好適合在該條件下使用。
聲對接換能器采用復合棒縱向振動換能器,基本組成包含前蓋板、壓電陶瓷堆,預應力螺桿和后質量塊。其特點是技術成熟,結構簡單,易于安裝固定、耐擠壓、聲發送能力良好[8]。采用 2片PTZ-4壓電陶瓷圓片作為振動源,前蓋板材質選用硬鋁,后蓋板為黃銅,預應力螺桿為鋼材料。
采用有限元方法對換能器建立諧響應分析模型,得到換能器在水中的導納曲線(見圖 2,其中,G為電導,B為電納)和發送電壓響應曲線(如圖3所示)。該換能器諧振工作點在歸一化頻率為1處,在水中兵器常用頻段范圍內換能器發送電壓響應級為80~100 dB,基本隨頻率線性上升。在緊密對接狀態下,通過調整換能器輸入電壓可滿足不同距離下目標回波強度聲信號輸出要求。
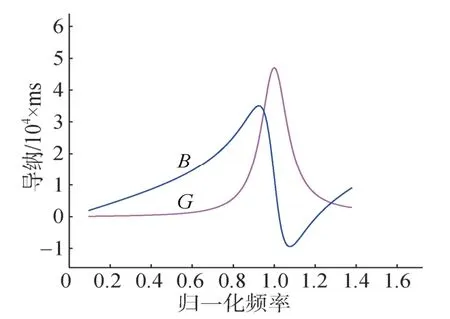
圖2 聲對接陣換能器導納曲線Fig.2 Admittance curves of acoustic butt array transducer
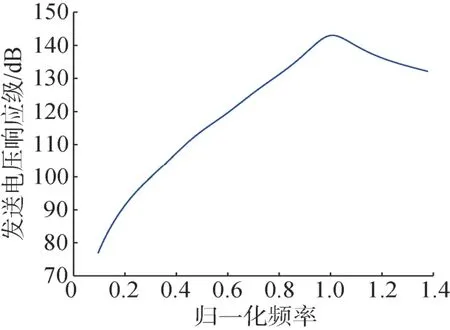
圖3 聲對接陣換能器發送電壓響應曲線Fig.3 Transmitting voltage response curve of acoustic butt array transducer
2.1.2 對接基陣及對接方法
聲對接基陣陣型與水下高速航行器聲學裝置陣型完全一致,對接換能器與接收換能器中心嚴格對準,一一對接形成聲通道,如圖 4所示。對接換能器通過承壓板安裝固定,換能器間采用吸聲材料填充,以降低換能器間振動耦合,基陣表面采用聲匹配材料(透聲橡膠)硫化覆蓋。
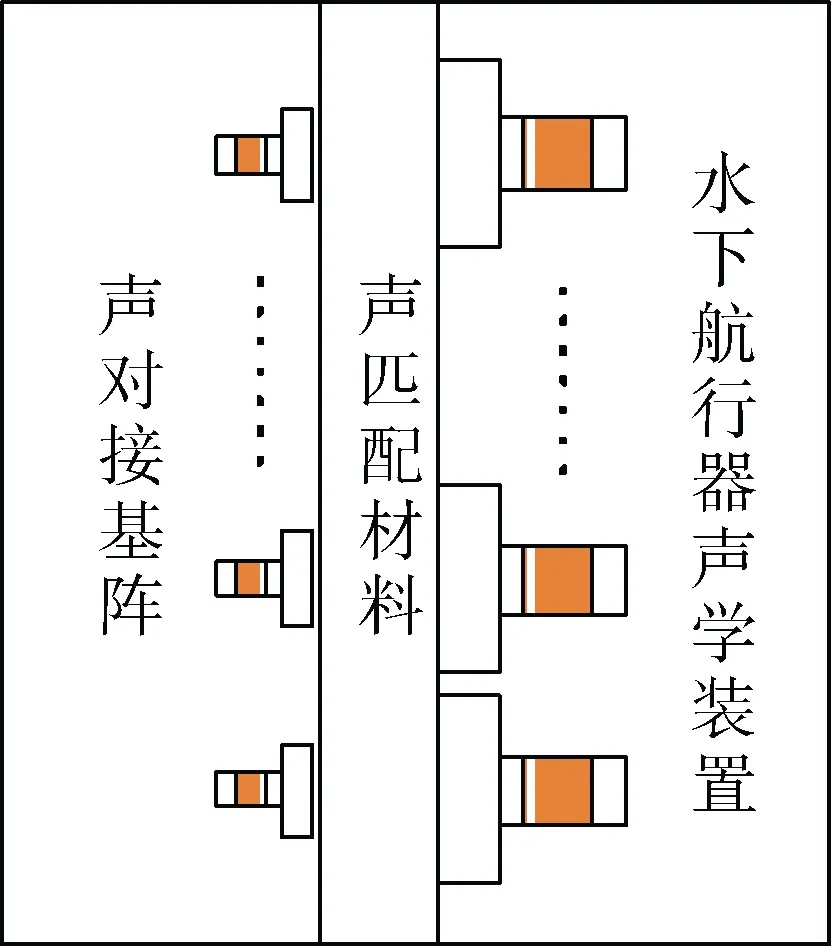
圖4 聲對接陣及對接狀態示意圖Fig.4 Schematic diagram of acoustic butt array and butt state
結構上,為保證一定的對準精度,將對接基陣和水下高速航行器自導頭段安裝在一塊水平底板上,二者水平中心對準。對接基陣在保證水平和垂直度前提下固定安裝后不可調整,自導頭段固定在移動導軌上通過轉動軸承可前后運動。使用時通過轉動軸承將自導頭段前移使接收陣面與對接基陣陣面接觸,并施加一定的預緊力。預緊力的大小采用力矩扳手保證,以保證聲信號的正常耦合,并一定程度上提高對接基陣的聲輻射效果。
1)聲匹配材料選擇
聲對接換能器與水下高速航行器聲學裝置基陣對接,為避免聲學裝置硫化橡膠層損壞并取得良好的聲耦合效果,需在基陣間增加一層聲匹配材料。對接基陣輻射聲信號經匹配材料和聲學裝置硫化橡膠的接觸界面后到達接收陣元端面。設聲匹配材料聲阻抗為ρ1c1,硫化橡膠聲阻抗為ρ2c2,推導得聲波垂直入射時分界面上反射波聲壓與入射波聲壓之比rp,透射波聲壓與入射波聲壓之比tp[9],且
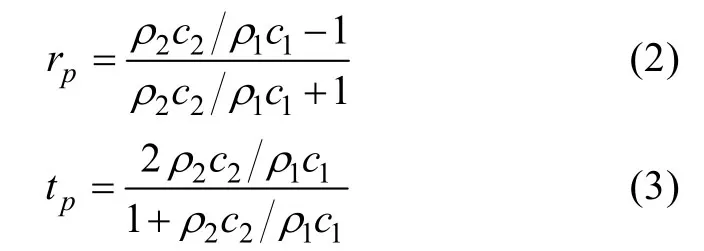
水下高速航行器頭部硫化橡膠層為聚氨酯橡膠,其聲阻抗與海水接近。由公式可知,宜選用與水下高速航行器頭部硫化橡膠層材料聲特性相同的材料,二者聲阻抗相等,理論上聲波將無損失地通過接觸界面耦合到接收陣元。同時,聲匹配材料適宜采用偏軟透聲橡膠且接觸面處涂抹聲耦合劑,使得在對接壓緊狀態下匹配材料與水下高速航行器硫化橡膠層緊密貼合,減少分界面處聲波的反射,最大限度地減少聲能量的損失。
2)通道隔離度控制
聲對接陣輸出的目標及環境噪聲信號通過聲匹配材料傳輸到水下高速航行器聲學基陣接收面,由于聲擴散機理通道間不可避免產生交叉耦合,影響通道間獨立性。通道間的交叉耦合可以通過通道隔離度進行評估,這里定義當一個通道進行聲傳輸而其余通道不工作時,該通道水下高速航行器聲學基陣接收換能器與相鄰通道換能器接收聲壓大小之差為通道隔離度。
對于圓柱形對接陣換能器,如果其輻射面半徑為a,則其在聲對接匹配材料中的聲波幅值達到平穩且規律變化的距離zg可簡單評估為[9]

式中,λ為聲波波長。
如果換能器輻射面半徑為 5 mm,聲波信號頻率為25 kHz時,zg約為0.42 mm。可見對于單個對接聲通道來說,只要對接陣換能器輻射面尺寸足夠小,其傳播到待測水下高速航行器聲學基陣接收換能器處的聲壓已經達到了穩定變化狀態。各個接收換能器處的聲信號聲壓可通過圓形活塞中心法線上輻射聲壓計算公式進行簡單評估,從而計算對接陣通道間隔離度。圓形活塞輻射中心法線上某個接收點聲壓[9]

式中:ρ0,c0和ua分別為聲匹配材料密度、聲速和輻射面振動法向振速;z為中心法線上接收點與輻射面中心距離;k為波數;R為輻射面邊緣到接收點距離,且

實際上,聲對接匹配層材料前后分別為聲對接陣陣面和航行器聲學基陣陣面,一般為硬金屬,阻抗遠大于聲匹配材料,聲波將在這 2個邊界處發生同幅度同相位反射。聲匹配材料外部是空氣,聲阻抗遠小于聲匹配層材料,聲波也將發生反射。可見,聲對接陣與航行器聲學基陣間的聲傳播環境是一個封閉的復雜聲場。
為更精確地實現聲對接陣耦合隔離度的分析計算,文中采用邊界元數值方法對聲對接陣輻射聲場進行計算。基于實際產品結構和尺寸,采用邊界元法建立了聲對接陣耦合聲場模型[10]。分別建立聲匹配層厚度5 mm,10 mm,15 mm,20 mm和25 mm時的聲場計算邊界元模型,對常規頻段的 15個頻點進行計算,得到相鄰通道接收換能器間聲壓級之差(隔離度)如圖5所示。
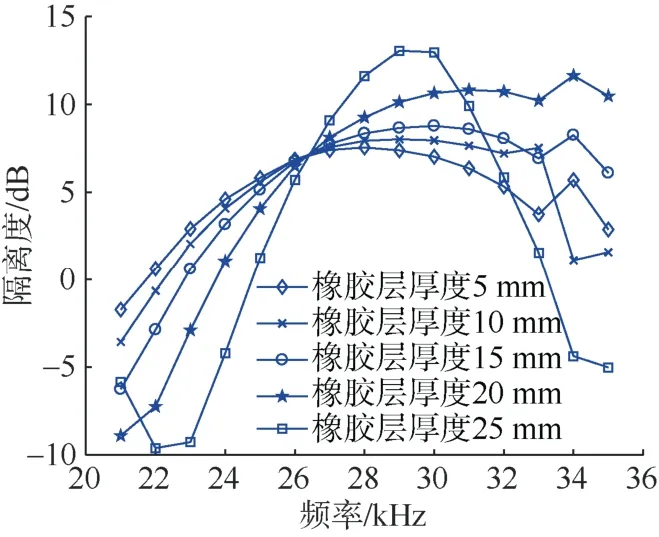
圖5 換能器1與換能器2接收面聲壓級之差Fig.5 Difference of received acoustic pressure level between transducer 1 and transducer 2
由圖 5可知,隔離度隨著頻率逐步增大,并在30 kHz左右達最大,且與橡膠層厚度呈正比關系。橡膠層為5 mm時,隔離度最大值為7.57 dB,在5種橡膠層厚度中最小;橡膠層厚度25 mm時,隔離度最大為13.06 dB,效果最好。頻率超過30 kHz后,不同橡膠層厚度時隔離度均開始下降,甚至變為負值。由此可見,通道間的聲耦合與聲波頻率、傳播介質厚度有密切的關系。在質厚度一定的頻率范圍內可以實現隔離度最大化。根據計算和測試結果,傳播介質厚度為傳輸信號的0.5個波長較合適。
2.2 基陣測試
聲對接基陣在使用前需要進行校準和測試,考察生成回波信號參數是否正確,及各通道間幅度和相位的一致性。根據測試情況,對各通道幅度和相位進行補償,從而實現目標回波信號的精確模擬。
陸上環境中,對接基陣與測試聲學基陣對接,施加一定大小預緊力。目標及海洋環境實時生成裝置生成頻率為f0的主動目標回波信號,同時疊加混響、噪聲等背景干擾信號。生成的信號經程控衰減器調整各通道幅度后,驅動對接陣轉換為聲信號耦合到測試聲學基陣。圖6為某一通道測試聲學基陣換能器輸出回波信號時域波形,圖 7為其頻譜圖。基于對接基陣輸出信號經過相關處理后估計目標方位、距離和速度[11],并與仿真設定目標參數對比,結果如表1所示。
從測試結果可見,對接基陣能正確生成目標回波信號,信號強度和頻率精度符合水下高速航行器對目標的檢測需求。模擬的目標參數與設定參數基本一致,能夠正確反映目標信息。從而驗證了基于聲對接耦合方式的水下高速航行器仿真測試是有效和可行的。
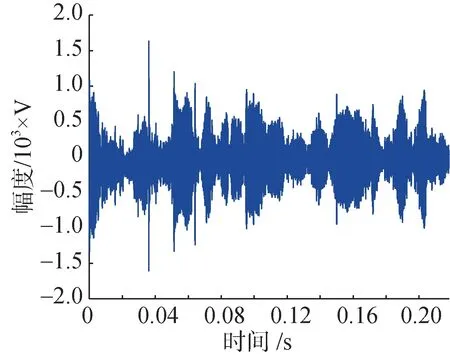
圖6 回波信號時域波形Fig.6 Waveform of echo signal in time domain
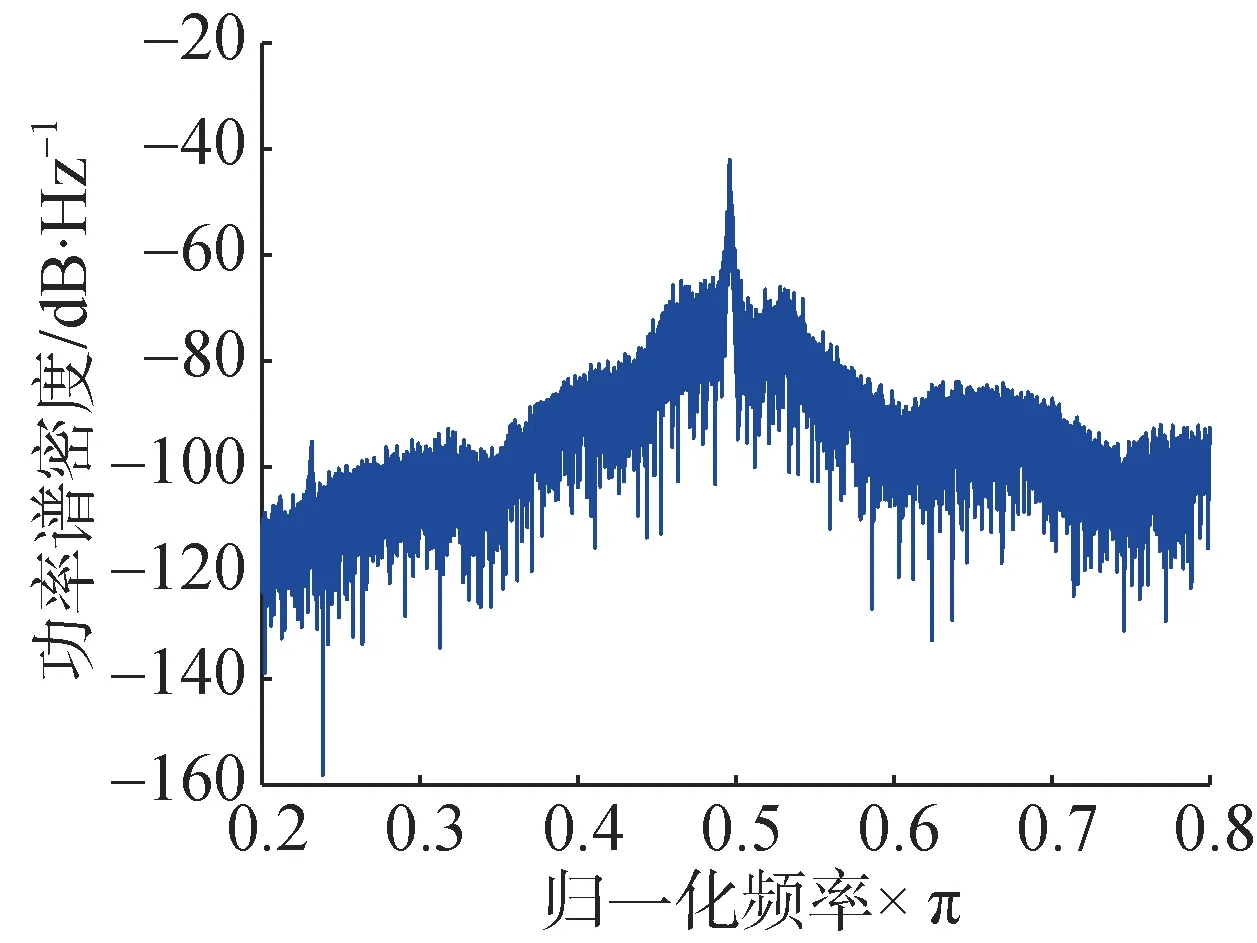
圖7 回波信號頻譜Fig.7 Frequency spectrum of echo signal
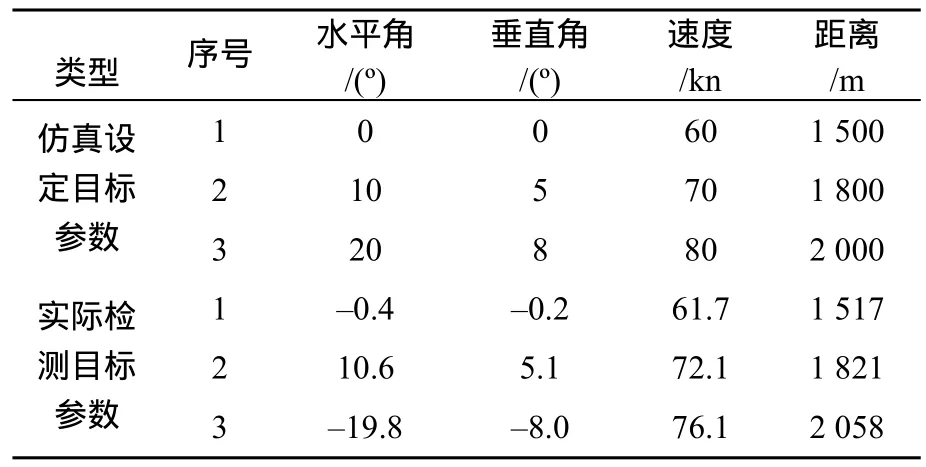
表1 設定目標參數與實際檢測參數對比Table 1 Comparison between set target parameters and actual detection parameters
3 仿真驗證
為驗證陸上全彈道仿真測試系統用于水下高速航行器全彈道測試的可行性和有效性,選取 2種典型的攔截高速小目標工況進行仿真測試。具體彈道圖見圖8和圖9。
通過驗證可知,2種工況下,被測航行器均能及時發現來襲目標,并進行有效的跟蹤攔截。經過對不同條件、多條次的仿真測試結果進行統計分析,并與實航試驗結果對比,從水下高速航行器自導發現來襲目標時刻、航向角變化情況、脫靶量等關鍵數據看,仿真結果和實航試驗結果基本一致,說明了陸上仿真的有效性。
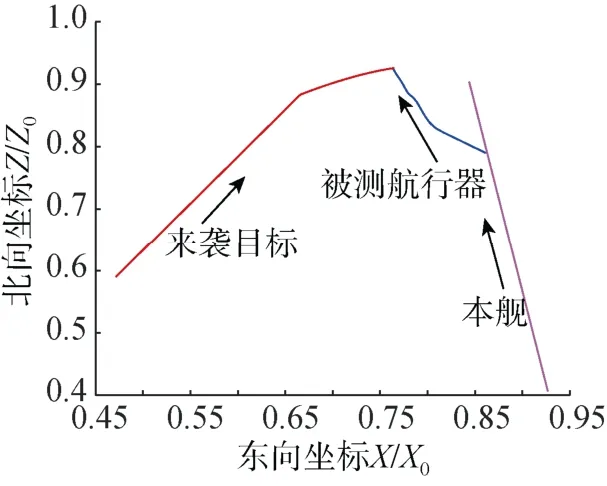
圖8 攔截高速目標1全彈道航跡圖Fig.8 Whole trajectory track of intercepting highspeed target 1
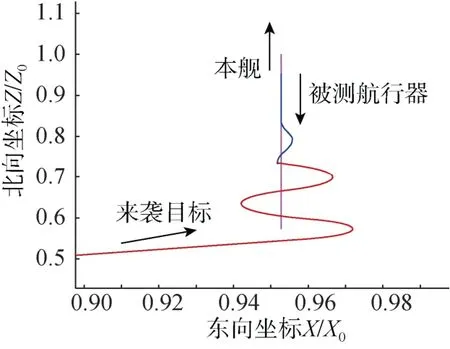
圖9 攔截高速目標2全彈道航跡圖Fig.9 Whole trajectory track of intercepting high-speed target 2
4 結束語
文中介紹的水下高速航行器陸上全彈道仿真測試系統采用聲耦合注入方式,在實驗室條件下即可完成水下高速航行器仿真測試工作。完成的主要研究內容為:1)實現了水下高速航行器水下目標檢測、導引及機動仿真,在接近水下高速航行器實航狀態和系統組成條件下實現了全系統仿真測試;2)實現了包含射前流程、入水彈道及導引彈道在內的水下高速航行器全彈道仿真測試;3)形成了基于聲耦合方式的半實物仿真系統設計和使用方法。
目前該系統已經在水下高速航行器的研制和實航試驗中使用,仿真數據與實航數據相符,系統功能和性能得到了實踐驗證,具有良好的科研效果。通過結構優化和功能提升,該系統可廣泛用于各型水下航行器的方案論證、性能測試、定型評價、作戰訓練等方面。結合實際使用情況,下一步工作的重點將是增加末彈道仿真模塊和功能、聲耦合基陣測試和校準方法研究、系統結構小型化及便攜式設計等方面。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25