長航時UUV導航校正與性能評估方法
2019-07-16 06:17:08葉開富
水下無人系統學報 2019年3期
關鍵詞:方法
陳 科,葉開富,杜 度,李 楊
(海軍研究院,北京,100161)
0 引言
無人水下航行器(unmanned undersea vehicle,UUV)在海洋開發領域發揮著越來越重要的作用,如海洋資源探索,海底管道鋪設,海底地形地貌描繪等[1-4]。導航是 UUV執行任務的前提,也是UUV能否順利完成任務的重要保障。由于 UUV航行時會存在隨時間不斷累積的誤差,這種誤差對于短航時 UUV的影響較小,但對于長航時UUV而言,這種影響十分嚴峻:UUV導航性能的校正與評估結果直接決定了長航時 UUV執行任務的成敗,而誤差較大的導航結果會造成長航時UUV的撞毀與丟失等一系列問題。因此,研究長航時UUV導航校正與性能評估方法尤為重要。
長航時 UUV導航校正與性能評估方法主要分為 2個方面:一是對導航方法的校正,即在分析各種 UUV導航方法的基礎上,利用組合導航的方式校正提高精度;二是對導航性能的評估,即設計一套統一的評價體系,以實現長航時UUV導航規范化和標準化評價。同時需通過分析長航時 UUV導航性能評估需求、評估方案及評估指標等,給出其導航性能評估方法體系。
基于此,文中對長航時 UUV導航校正與性能評估方法進行了系統闡述,給出其具體方法及性能指標,并提出相關分析建議,最后結合水下聲學應答器(underwater transponder positioning,UTP)的特點,提出長航時 UUV 導航校正方法,通過仿真試驗驗證了所提方法的有效性。
1 UUV導航方法概述
UUV最早出現于20世紀50年代[5],近年來,學者們提出了多種 UUV導航方法,按照導航原理,主要分為慣性導航、聲學導航、視覺導航和地球物理導航等。
1.1 慣性導航
慣性導航是 UUV最常用的導航方式,主要依據牛頓慣性定律提出[6-8],其優點是具有極高的自主性和隱蔽性。但是慣性導航存在隨時間不斷累積的誤差,特別是對長航時 UUV的影響較為嚴重。UUV慣性導航通用微分方程主要包含姿態方程、速度方程和位置方程[9],即
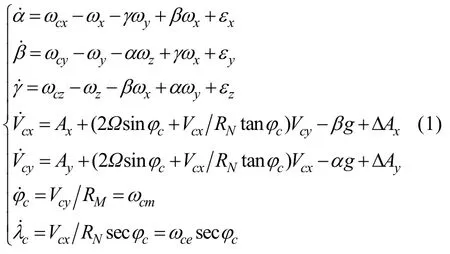
式中:α,,βγ為平臺誤差角;和分別為 3個坐標軸方向上計算得到的指令角速度;和zω分別為3個坐標軸方向上的指令角速度;εx,εy和εz分別為3個坐標軸上的陀螺漂移;vcx,vcy為速度;Δax,Δay為加速度計零偏;φc,λc為位置;Ω為地球自轉角速度。
1.2 聲學導航
水下的主要通信方式是水聲通信,聲學導航方法在長航時UUV導航中發揮著重要作用,因此在水聲通信的基礎上發展出水聲導航系統[10]。聲學導航的優點是導航結果較準確,且沒有隨時間累積的誤差;缺點是由于聲信標需提前布放,工作量較大,且對聲信標位置的確定存在一定困難。
1.3 視覺導航
視覺導航是利用視覺設備實時確定 UUV在水下的位置[8]。這類導航算法較為復雜,需要UUV上配備全方位水下攝像機,且需要光信標等輔助設施。由于水下能見度較低,這種導航方式使用較少,常用于多UUV協同導航[11]。
1.4 地球物理導航
地球物理導航是利用地球物理的本身特征,如重力場、地磁場或海底地圖等對 UUV進行導航[12]。其優點是隱蔽性很高,并且較為準確;缺點是需要提前測得所航行海域的地球物理信息,工作量較大且需要存儲識別的任務量較多。
通過以上對 UUV導航方法的分析可知,適用于 UUV的導航方法具有不同的優缺點,若要實現長航時的水下導航,只應用傳統的慣性導航方法,會存在累積誤差,且單一導航方法不能滿足要求,需要多種方法配合完成導航任務,提高長航時UUV導航精度。例如:若UUV可以在航行一段時間后浮出水面進行導航校正,那么就可利用與衛星導航組合的形式進行導航精度校正;另外,由于聲學導航具有較高的定位精度,也可將其作為輔助校正方式,如長基線(long base line,LBL)、短基線(short base line,SBL)、超短基線(ultra-short base line,USBL)以及水下聲信標等方式,對長航時UUV的導航結果進行校正;同時也可利用多傳感器數據融合算法實現長航時 UUV導航校正。具體的導航方法以及數據融合濾波方法應根據實際應用情況進行選擇。
2 試驗需求
長航時 UUV導航校正與性能評估方法的實現需要試驗場地、試驗設備和評價機制等需求(見圖 1),這些是完成長航時 UUV導航校正與性能評估的前提和重要保障。
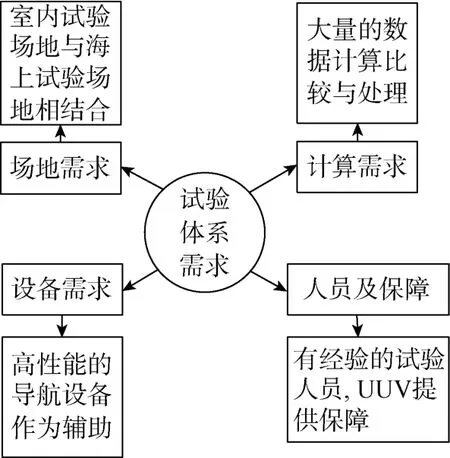
圖1 長航時無人水下航行器導航試驗需求Fig.1 Navigation test requirements of long-endurance unmanned undersea vehicle (UUV)
2.1 場地需求
對于一些小型短航時 UUV的導航設備,可以在室內水下進行性能評估。但室內水池無法模擬 UUV在海上應用時所受到的海浪、洋流等干擾,且長航時 UUV需要開闊海域才能完成長航程、長航時的水下導航性能評估。因此需要采用室內試驗場地與海上試驗場地相結合的模式,完成水下導航性能評估試驗。
2.2 設備需求
導航性能的評估需要利用較為精確的外測或內測輔助設備。通常采用精度較高的全球定位系統(global positioning system,GPS)、光纖羅經運動傳感器、多普勒計程儀(Doppler velocity log,DVL)等設備作為輔助設備。一方面給出當前設備的導航精度水平,另一方面,導航精度要求較高的UUV上也可攜帶上述設備,通過濾波算法實現組合導航,從而進行長航時UUV導航校正。
2.3 人員及保障需求
UUV導航試驗中存在一定未知危險,如航行故障、未經過測試的導航設備不準確導致丟失等。由于 UUV在研制過程中投入了大量的資金和人力,一旦危險發生將產生巨大損失,因而需要有經驗和專業知識的試驗人員,能夠有效預防問題,及時解決問題。同時,長航時UUV導航校正與性能評估需要多天的時間才能完成,需要對試驗人員提供足夠的生活保障,同時需要對UUV長航時航行提供足夠的保障資源。
2.4 計算需求
有效的數據存儲有利于對試驗數據的分析。在進行數據分析時,利用已存儲的可重復利用的數據可有效地減少試驗次數。因此,試驗用計算機應具有足夠的數據儲存能力及強大的數據處理能力,以保證對 UUV航行過程中導航性能的校正、分析與處理。通過對試驗系統的整體設計及對數據存儲方式的選擇與設計,使其具備對數據實時分析處理以及航行后數據還原的能力,為長航時UUV導航提供可靠的數據處理保障機制。
3 實現方法及性能指標
3.1 實現方法及流程
長航時 UUV導航校正與性能評估的具體實現方法是利用較高精度的導航設備輔助測試UUV所攜帶設備的導航精度。由于衛星和無線電導航精度較高,在進行長航時 UUV導航性能評估時,可采用近水面航行的方式,利用衛星或無線電導航結果作為 UUV水下導航的評價基準。另外,也可采用其他導航精度較高的試驗設備作為評估依據。通過室內水池試驗以及海上試驗 2種方式收集導航數據,將收集到的導航數據與基準導航數據對比,給出UUV導航性能評估結果。具體流程如圖2所示。
1)試驗準備。在進行長航時UUV導航校正與性能評估試驗之前,應制定詳細的試驗方案,規劃試驗過程中 UUV的航行路徑,確定并安裝輔助導航設備,制定試驗應急預案等。
2)UUV布放入水。利用吊放吊具等設備,將UUV緩慢布放入水,進行試驗準備。
3)水下備航。啟動 UUV備航模式,為自身攜帶的控制系統、導航系統等供電,并與控制中心交換信號,確認備航過程順利進行。水下備航過程是長航時 UUV導航試驗進行的重要保證,決定著航行試驗的安全性和準確性,因而需要對水下備航階段予以高度重視。
4)進行長航時UUV導航試驗。根據預先設計的航行航路進行試驗評估。按照水下導航執行任務的要求設計試驗過程,根據預先設計的試驗過程執行試驗。
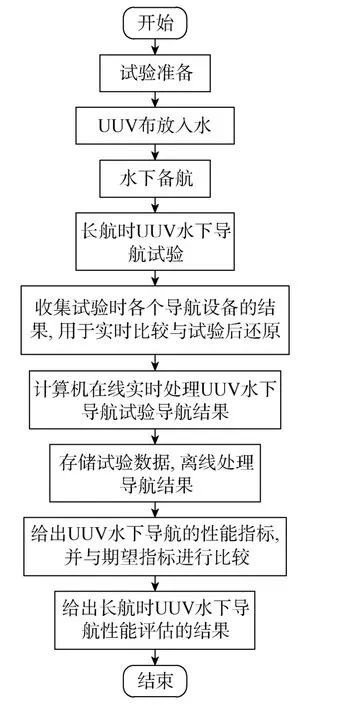
圖2 長航時UUV導航性能評估流程圖Fig.2 Flow chart of navigation performance evaluation of long-endurance UUV
5)收集各導航設備試驗結果,用于實時比較和試驗后還原。考慮到試驗進行過程中要耗費大量的人力和物力,在設計長航時 UUV導航校正與性能評估方法時,采用數據采集存儲的形式,數據一方面用于實時導航校正與評估,另一方面用于試驗后數據離線時的精確處理及試驗還原。
6)計算機在線實時處理 UUV導航試驗結果。其目的在于,根據UUV在當前時刻的航行狀態實時進行導航校正,并且實時評估導航結果,及時調整試驗路線,避免潛在的試驗危險。
7)存儲試驗數據,離線處理導航結果。與在線處理數據相比,離線處理數據可以提供更加精確的結果。另外,在試驗后需要還原試驗場景時,也可以進行離線數據處理,這樣無需重新進行試驗,可節約試驗成本和時間。離線處理與在線處理相比有更高的處理效率與試驗精度,可以對試驗過程進行重現,以得到更好的結果。
8)給出 UUV導航性能指標,并與期望指標進行比較。通過比較給出長航時 UUV導航的系統化性能指標,便于橫向比較各種類型的長航時UUV導航性能。
9)給出長航時UUV導航性能評估結果。結合上述各個步驟得到的結果綜合評價長航時UUV導航性能,給出綜合化的評價指標。
通過上述步驟完成長航時 UUV導航校正與性能評估的整個過程。
3.2 性能評估指標
長航時 UUV導航性能的評價標準主要包括姿態誤差、速度誤差和位置誤差等。針對具體的試驗需求,給出各項性能指標的要求,并將試驗結果與期望指標相比較,利用比較結果進行水下導航校正與性能評估。當然,也可依據實際情況,與長航時 UUV的整體評價指標相結合,建立系統化的長航時 UUV導航性能評估體系(例如將UUV航行距離、使用壽命、具體執行任務等方面與其導航性能相結合)。
3.3 相關建議
建立長航時UUV導航校正與性能評估方法,有利于UUV導航性能的完善與裝備研制的發展。對于長航時 UUV導航性能的評價,應站在全局角度,結合UUV的整體設計、任務需求等綜合考慮,給出長航時UUV導航評估結果。長航時UUV導航校正與性能評估的目的在于,給出有說服力的水下導航評估結果,為設備性能提供可靠的評價指標。提高長航時 UUV導航精度的具體建議包含以下幾點。
1)將長航時UUV導航校正與性能評估體系與長航時 UUV整體評價體系相結合,建立統一的評價標準。
2)建立通用的試驗設施。在設計搭建試驗場地時,應考慮不同試驗對于場地及其他后勤設備的需求,建立統一化、通用化的試驗場地以及后勤服務,可以有效提高試驗場地及后勤設備的利用率,節約成本。
3)提高試驗水平與實戰水平的近似程度。利用試驗設備模擬真實執行任務過程中的環境等情況,使得試驗結果更加接近于真實實戰水平,從而使長航時 UUV導航校正與性能評估方法的提出更加具有實際意義。
為了更系統地實現長航時 UUV導航校正與性能評估,應針對不同情況建立系統的導航評價標準。培養專業經驗豐富的試驗人員,成立長航時 UUV導航校正與性能評估指導小組,一方面需提高指導小組的專業技術能力,另一方面,需加強與各研制單位的交流協作,以培養更多、更全面的試驗人才。
4 UUV UTP導航校正方法
傳統的 UUV多采用慣性導航航位推算等形式確定其位置。根據UUV的初始導航信息,結合傳感器測量結果推算 UUV的位置信息。這種方法在短時間內可以保證較高精度,但隨著時間的增加,誤差會不斷發散。UTP是一種基于水聲設備測距進而給出 UUV所在具體位置的水聲輔助導航儀器。其原理是:在海底布放聲信標,在測定時通過聲音傳輸給出 UUV較為準確的位置信息。可以利用UTP輔助校正,以減小UUV導航的積累誤差。下面以UTP為輔助導航設備[13],對UUV航位推算的結果加以校正。
4.1 航位推算系統誤差模型
首先給出 UUV姿態誤差、速度誤差以及位置誤差的表達式[13]如下
1)姿態誤差方程
采用四元數方法對 UUV的姿態進行更新,經過推導,得到UUV的姿態誤差方程為

2)速度誤差方程
利用DVL的測量結果為UUV航位推算提供速度參考。根據 DVL的測量原理可知,其測量誤差主要由刻度因數誤差δKD、速度漂移誤差ΔvD以及測量白噪聲wΔ組成,即

式中,為多普勒測速儀在載體坐標系下的速度測量值。
3)位置誤差方程
首先給出UUV的位置微分方程
結合位置微分方程可以得到 UUV的位置誤差方程為
4)UTP輔助航位推算的UUV狀態方程
結合以上推導的 UUV姿態、速度和位置的誤差方程,選擇狀態變量,可以建立 UTP輔助UUV航位推算的狀態方程

式中:x為狀態變量;F為系統矩陣;G為控制矩陣;w為控制向量。
5)UTP輔助航位推算的UUV觀測方程
UUV航位推算系統的位置解算方程為
UTP系統的位置解算方程為
將UUV航位推算系統位置解算值與UTP系統位置估計值的差值作為觀測量,可以建立系統的觀測方程

4.2 UTP輔助UUV校正仿真
通過設計下述仿真試驗驗證所提出的 UTP輔助 UUV航位推算導航校正結果。試驗相關參數設置如下:UUV初始位置設置為東經120°、北緯 30°;姿態誤差分別為 1′,1′和 10′。三軸速度誤差均為0.6m/s,三軸位置誤差均為10m。得到UTP輔助導航校正UUV的位置結果如圖3所示。
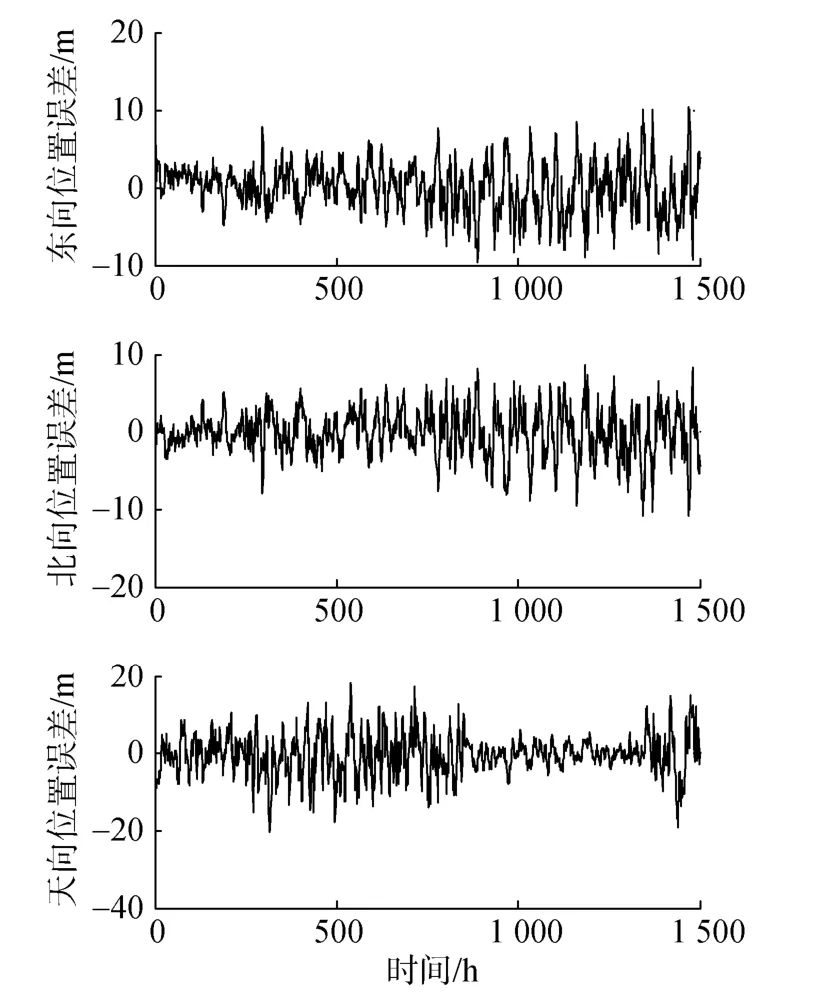
圖3 水下聲學應答器輔助校正結果Fig.3 Results of calibration assisted by underwater transponder positioning (UTP)
通過圖 3可以看出,經過 UTP輔助校正的UUV位置導航誤差均穩定在零值附近,且在20 m范圍內來回波動。仿真結果證明UTP可以為UUV提供較為準確的位置校正信息,經過UTP的校正,抑制了UUV的導航位置誤差發散。
5 結束語
文中通過對 UUV導航方法的分析比較,提出了長航時 UUV導航校正與性能評估的實現方法與流程,并結合UTP對長航時UUV導航累積誤差進行了校正。仿真結果表明,通過UTP輔助導航的形式,可以有效減少長航時 UUV誤差累積導致的發散,位置誤差結果在零值附近波動,滿足長航時UUV的導航需求。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56