面向車-人碰撞事故的人-地摩擦因數可靠性分析
2019-07-08 09:29:36張曉云楊小波張東明侯心一
振動與沖擊 2019年12期
關鍵詞:測量
張曉云, 楊小波, 張東明, 侯心一
(1. 上海交通大學 機械與動力工程學院,上海 200240; 2. 上海市公安局交通警察總隊,上海 200070)
交通事故再現作為一門數字化仿真技術,可為事故認定提供有力依據。事故再現類型中又以車-人接觸碰撞事故較為常見和復雜。此類事故包含了人-車-地三個系統及其相互作用,涉及變量多,因此,車-人交通事故數值再現一直是交通安全研究中的焦點問題[1]。鑒于實際道路環境的復雜性,數值計算中往往存在諸多不確定因素。充分考慮不確定因素并采用不確定性方法分析其對道路交通事故再現結果的影響,對于提高再現分析結果的可靠性和準確性[2-3]具有重要意義。其中,行人摩擦生物力學特性對車人碰撞事故再現結果有直接的影響[4]。事故數值再現計算中,在落地瞬間運動狀態相同的前提下,人-地接觸摩擦因數直接決定了行人最終落點位置和姿態,進而對車輛初始速度推算產生影響,是事故再現計算中關鍵參數之一[5]。已有的部分研究中,人-地摩擦因數常作為定值或均勻分布處理[6-7],未考慮到該參數的不確定性對計算結果的影響。
車-人接觸碰撞事故中,行人落地姿態是計算精度和準確性的重要評判依據,車輛初始速度則是事故認定的關鍵參數。本文將基于交通事故典型案例,選取行人-小客車低速碰撞且行人落地后在地面運動狀態以滑移為主的案例為分析對象,對車-人接觸碰撞事故中的人-地摩擦因數特性進行深入探討與分析,考察在碰撞形態、行人高矮、汽車外廓形狀、碰撞速度等因素一定的前提下,行人在與地面接觸后由于不同的人-地摩擦因數所導致的運動狀態差異,由此建立行人落地姿態和車輛初速度與人-地接觸摩擦因數之間的可靠性分析模型,進而對人-地摩擦因數的不確定性進行分析,考察其對于行人落地姿態和車速推算的影響;在此基礎上給出該參數測量精度要求以及相應不確定程度下車輛初速度的置信區間。
1 三維接觸模型構建
在某典型車-人碰撞事故案例中,通過現場勘查發現,行人分別和事故車輛的保險杠、發動機罩、擋風玻璃發生接觸,之后在空中翻轉后落地,滑行一段距離后停止在人行橫道線上。行人落地后的位置與姿態通過現場勘查記錄和法醫檢驗報告獲得。
根據現場勘測結果,繪制如圖1所示的事故現場示意圖。事故現場有一輛小客車,該車右前輪、右后輪分別距公路北側機動車道邊緣線2.30 m、2.18 m,右前輪制動拖印長12.58 m,始點距邊緣線2.02 m。行人垂直于道路走向倒臥于小客車前方,頭部中心和腳跟分別距邊緣線2.46 m、3.83 m,頭部距小客車右前輪3.61 m,現場測得行人地面滑移痕跡為4.19 m。右前輪測量的基準點為其西北方14.23 m的路口信號燈桿。

圖1 事故現場示意圖
建立事故車輛和道路三維數值模型,其中道路為剛性平面,車輛為有限元模型。車輛模型包含8 745個節點,7 459個單元,單元類型包括三角形單元和四邊形單元。提取模型的單元信息,在多剛體動力學軟件MADYMO中標定車輛幾何模型,再結合MADYMO假人模型標定車-人-地多剛體系統數值計算模型的參數,車輛參數從車輛數據庫的型號中提取。事發時車內乘坐2名成年人的質量為150 kg。根據行人體貌特征,選擇PedHumanMale50%分位男性假人模型。該行人模型為多剛體假人模型,基本單元為橢球體。另外,根據相關醫學鑒定結果資料,結合行人受傷模式和當事人筆錄,確定碰撞前行人的初始姿態。完成后的多剛體系統計算模型如圖2(a)所示。
設定計算時間為2.5 s,步長為2×10-5s,采用歐拉積分法,將碰撞前、碰撞瞬間、拋出過程、落地和停止等幾個關鍵時刻行人所處位置及狀態集成在圖2(b)中,其中的線條代表行人頭部運動軌跡。通過與現場勘查記錄進行對比,本案例的數值仿真結果較好地還原了事故過程。
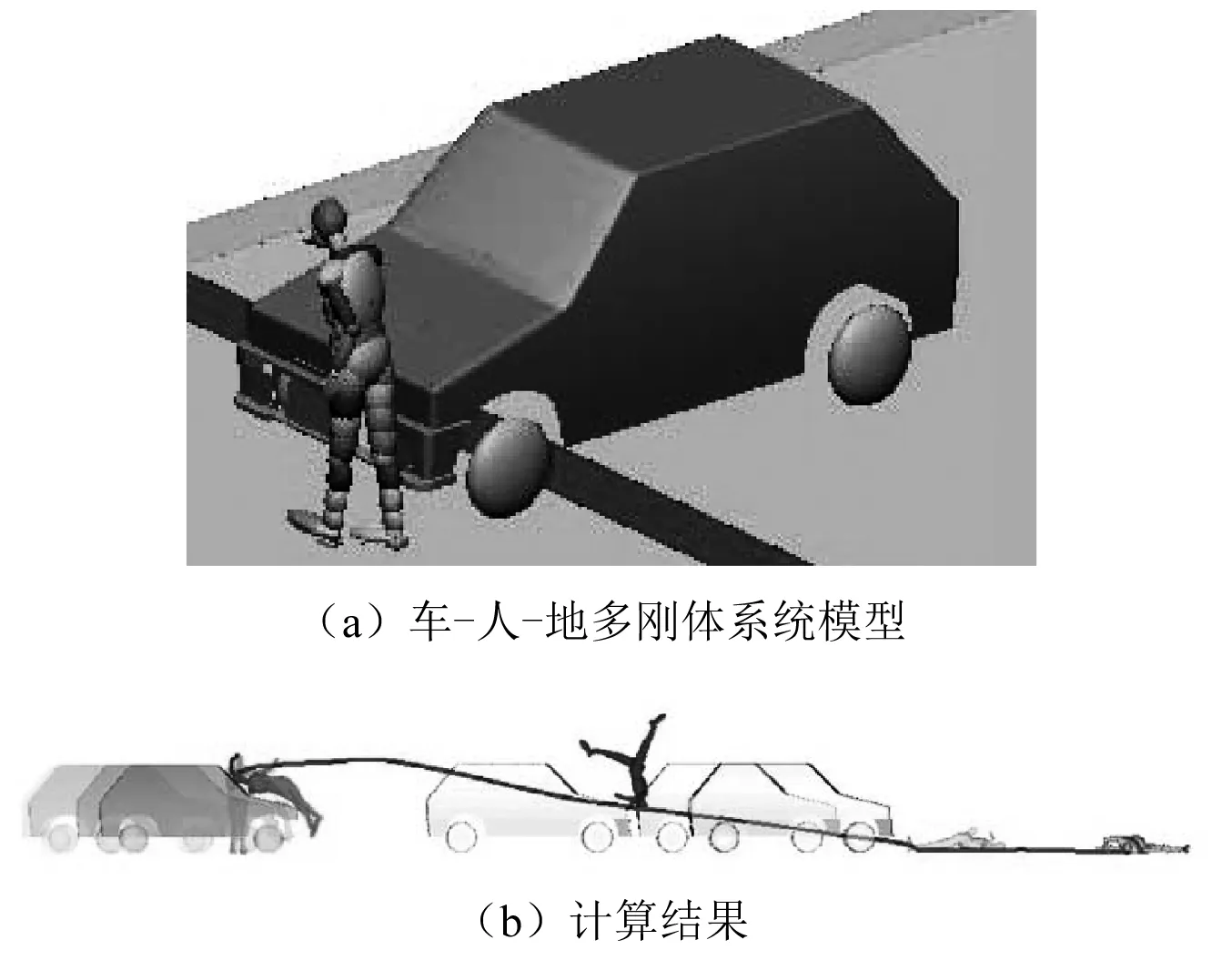
圖2 事故建模及過程計算
2 人-地摩擦因數可靠性分析
為了對人-地摩擦因數μp進行可靠性分析,首先建立目標變量與μp間的函數關系。本文將著重考察行人落地姿態和車輛初速度兩個目標變量。
經分析,本案中行人運動狀態分為兩個階段:落地前和落地后。人-地摩擦因數的作用主要體現于第二階段。第一階段中,車輛初速度對行人的運動形式有著決定性的影響,因此,在進行人-地摩擦因數分析之前需要對車速做出較為準確的推算。
2.1 車輛初速度判定
在事故的正向仿真計算中,通常車輛初速度對計算結果的影響比其余參數都更為敏感[8]。車輛初速度判定主要根據現場測量痕跡,包括擋風玻璃破損位置和行人拋距。
一方面,不同車輛初速度下車輛與行人碰撞后,行人側倒后與擋風玻璃碰撞的位置存在差異。這種差異主要由行人側倒的角速度和車輛的行駛速度決定。已有的計算分析表明,在車輛常見的行駛速度范圍內(30~80 km/h),行人側倒角速度對碰撞點位置的影響遠小于車輛行駛速度對其的影響;即車輛行駛速度越大,行人頭部與擋風玻璃接觸時間越早,碰撞前的行人角位移越小,則相應的碰撞點位置也越高。在此形態交通事故中,擋風玻璃破損位置可作為車速推算的依據之一;另一方面,根據碰撞理論,碰撞速度對行人拋距有直接影響,故行人拋距也是車速判定的重要依據。以上數據可通過現場及停車場勘測直接獲得。
取速度區間為30~80 km/h,步長為5 km/h,設定計算時間0.2 s,計算步長10-5s,采用歐拉積分法。計算結果數據表明,在擋風玻璃與行人頭部發生碰撞的瞬間,行人頭部質心的Z坐標會發生突變,具體在頭部質心位置-時間曲線上表現為一明顯轉折點。提取不同車速情形下上述轉折點所對應的行人頭部質心Z坐標,記為Zhead。此外,在接觸碰撞過程中,受頭部尺寸的影響,擋風玻璃與行人頭部的實際接觸位置比頭部質心位置略低。記擋風玻璃破損中心Z坐標為Zcnt,計算模型中假人頭部作為球體處理,根據球與斜平面接觸的幾何關系,Zcnt與Zhead具有關系:
Zcnt=Zhead-rsinα
式中:r為假人模型中行人的頭部半徑;α為行人頭部質心和接觸點連線同水平線的夾角。
對于行人頭部,經估算,r約為0.08 m,α約為26°。在MADYMO結果文件中提取碰撞瞬間行人頭部質心的Z坐標,經上述修正,采用有理數逼近擬合得到擋風玻璃破損位置Z坐標與車輛初始速度vc0具有近似關系:
(1)
式(1)擬合確定系數為0.999 5。現場測量擋風玻璃破損位置中心點距離地面垂直距離h=1.22 m,根據式(1),可得其對應位置車速為51.54 km/h。
改變計算時長,保證計算至行人落地之后。車速越大,行人落地后運動時間越長,故不同的車速將對應不同的計算時間。通過對結果文件可視化分析發現,行人落地瞬間軀干的加速度會出現突變,為此采用軀干下部加速度(TorsoLow_acc)突變位置來推算落地時間節點。根據上述時間節點,記錄不同車速下的行人拋距,記為dthrow,對所得行人拋距與車速進行二次擬合,得到車速與行人拋距之間的關系為
(2)
式(2)擬合確定系數為0.994 3。現場可測量痕跡包括車輛右前輪制動痕跡,其起始點位置與行人第一落地點位置在汽車運動方向距離為10.34 m,計算模型中初始時刻右前輪中心點與行人中心相距0.81 m,則行人實際拋距為9.54 m,根據式(2),其對應的車輛初始速度vc0為46.09 km/h。綜合考慮上述兩次計算結果,選取計算車速為47.67 km/h。
2.2 μp對行人落地姿態影響的可靠性分析
根據現場測量及目擊證人筆錄,得到行人落地后的大致位置及姿態如圖3所示,其中行人基本姿態為臥倒狀,背部朝上。
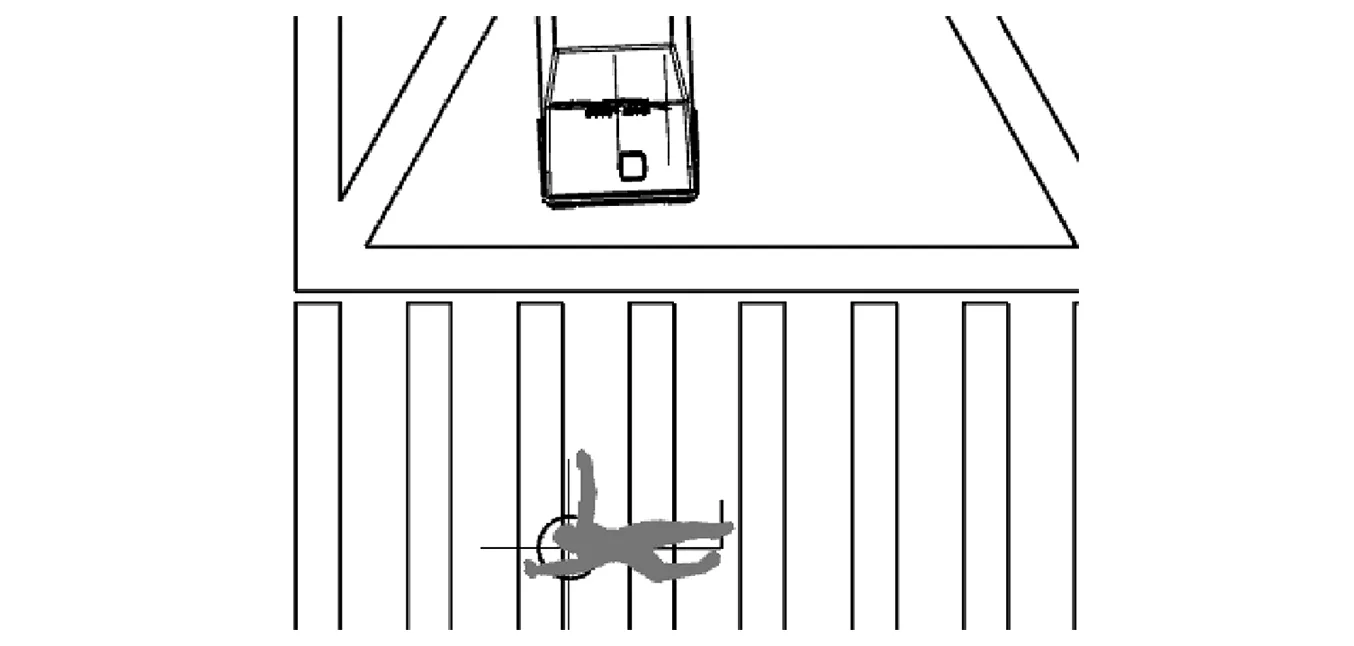
圖3 行人停止姿態示意圖
為建立可靠性分析的數學模型,首先需要定義計算坐標系。在本階段過程中,僅考慮人-地摩擦因數對行人運動的影響。此時車輛與行人的接觸已經結束,因此對于不同的μp,車輛的停止位置是確定的。為此選擇車輛右前輪為原點建立坐標系。如圖4所示,xwOwyw為現場測量坐標系,xcOcyc為車輛右前輪為原點的坐標系。A代表行人頭部位置,B代表行人腳跟位置,Gp代表行人質心位置。根據現場測量數據,⊙C1的半徑為14.23,⊙C2的半徑為3.61,xw1=2.30,xw2=2.46,xw3=3.83。由圖4可知:
xc1=xw1-xw2,xc2=xw1-xw3
利用圓的方程可以求出行人位置坐標A(-0.160,3.606),B(-1.530,3.606)以及行人質心位置坐標Gp(-0.845,3.606)。
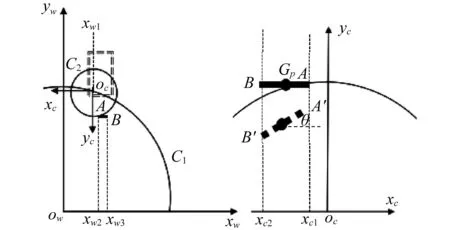
圖4 計算坐標系統轉換
行人屬于多自由度系統,完整描述其狀態所需變量較多,為簡化計算,本案例中將行人簡化為一桿件,其位置信息包括桿件的質心位置和轉角,分別代表行人落地質心位置和行人轉角,行人轉角主要通過測量腹部與頭部連線的方向獲得。根據現場測量數據類型,定義行人落地姿態向量為
d=(dhead-line,dfeet-line,dhead-tyre,θbody)
式中:dhead-line為頭部與邊緣線的距離;dfeet-line為腳跟與邊線的距離;dhead-tyre為頭部與前輪中心的距離;θbody為行人轉角。
當質心位置一定時,θbody將影響行人頭部和腳部位置,為此考慮將行人轉角信息引入前三個變量之中。圖4中A′B′為計算所得位置,定義行人長度為
L=xc1-xc2
計算所得質心坐標記為(xG,yG),則行人頭部和腳部的坐標分別為
A′(xG+Lcosθ,yG+Lsinθ)
B′(xG-Lcosθ,yG-Lsinθ)
則d中各元素表達式分別為
dhead-line=2.3-xG-0.5Lcosθ
dfeet-line=2.3-xG+0.5Lcosθ
θbody=θ
鑒于質心坐標中已包含轉角信息,將行人姿態向量重新定義為
d=(dhead-line,dfeet-line,dhead-tyre)
現場測量得到的準確值記作
則計算結果的相對誤差為
式中:M為足夠大的整數;k為行人基本姿態標記,k=1代表倒臥,k=-1代表平躺。
定義M與k主要是為了保證行人落地姿態的基本方位。事實上,對于車-人交通事故再現,應當重點關注行人落地質心坐標的精度,上述誤差定義中缺乏對這一點的考慮,即當θ發生變化時,對應的誤差極小值位置并非是現場測量值,因此需要對d中的元素做相應修正。
取θ∈[-π/2,π/2],并提取相應ε極小值對應的位置坐標(xmin,ymin)。結果表明θ發生變化時僅ymin發生改變。通過對數據點進行擬合發現ymin與θ具有關系:
ymin(θ)=0.100 3θ3-0.038 73θ2-0.677 9θ+3.617
(3)
式(3)的擬合確定系數為0.999 8。利用該關系對誤差函數中的dhead-tyre項進行修正,得到dhead-tyre新的表達式為
其中:
Y(θ)=3.606-ymin
經上述修正,誤差極值點位置不再隨轉角變化而變化,行人停止位置轉角僅對計算誤差極值大小產生影響。同時,修正后的誤差需滿足邊界條件,即
ε(-0.685,3.606,0)=0
滿足上述邊界條件的目標函數為
改變人-地摩擦因數,取μp∈[0.55,0.95]。因在仿真計算中發現行人落地后始終呈臥倒姿態,故取消其姿態判斷因子。即
(4)
式(4)需要測量的參數包括車輛右前輪坐標系下行人的質心位置(xG,yG)及轉角θ。通過直接測量相關節點的相對位置即可獲得行人質心相對于車輛右前輪的坐標。考慮到頭部轉向較為靈活,受外界因素影響較大,故采用胸部與腹部的連線在XY平面上投影點的相對位置來確定行人轉角。上述測量節點的具體位置如圖5所示。
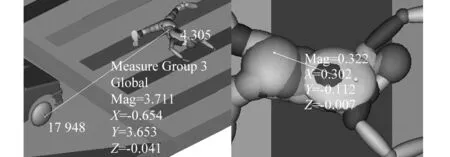
圖5 仿真結果數據提取
取人-地摩擦因數范圍為[0.56,0.92],步長為0.01。改變人-地摩擦因數,按照圖5所示方法提取不同摩擦因數對應的結果文件數據,代入式(4)計算可得不同人-地摩擦因數下事故再現計算中行人落地姿態的誤差值。經嘗試,發現采用有理數逼近擬合可得到最為理想的結果,相應的數學關系式為
μp∈[0.56,0.92]
(5)
式(5)的擬合確定系數為0.999 9,所代表的最小誤差值為3.4%,對應人-地摩擦因數為0.82。根據上式,繪制如圖6所示的人-地摩擦因數的區間與最終行人落地位置誤差之間的關系,其中μl與μu分別代表對應誤差下人-地摩擦因數的下限和上限。由圖6可知,針對本案例,欲將計算誤差控制在5%以內,對應摩擦因數取值應在0.78~0.85。同理,10%誤差所對應的人-地摩擦因數范圍為0.75~0.90。
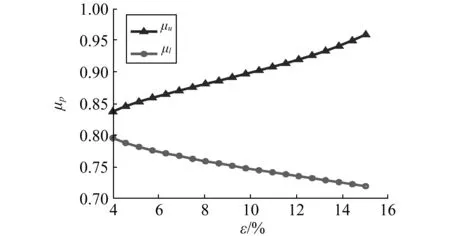
圖6 行人落地姿態計算誤差與摩擦因數區間的關系
2.3 μp對車速判定影響的可靠性分析
本案例中,行人彈出后沿道路方向合力為零(不計空氣阻力),因此其質心在Y方向的速度會在一定時期內保持恒定,直至落地后與地面發生接觸碰撞和相互摩擦滑移。
對于行人質心位置,取車輛初始速度從30 km/h~80 km/h。分析同一車速下的計算結果文件,根據0.3 s~0.9 s之間的計算結果,發現該時間段內行人未落地,因此其在車輛前進方向的位移-時間曲線為直線,表明Y向運動(車輛前進方向)速度基本保持恒定。取t=0.5 s對應的速度,記為vp0.5,考察車輛初始速度與vp0.5的關系。提取不同車輛初始速度下的計算結果,經擬合,碰撞后行人速度vp0.5與碰撞前車速vc0具有關系:
vp0.5=0.2vc0+0.88
上式擬合確定系數為0.976 2。不考慮行人落地后碰撞瞬間的速度損失,行人起始滑移初速度與第二階段滑移距離s2應當具有關系[9]:
以車輛初速度為47.67 km/h為例,設定重啟動計算時間為tr=0.87 s,考察人-地摩擦因數μp對行人滑移距離s2的影響。在計算結果文件中提取相應的數據,經過擬合發現其具有近似關系:
行人作為多剛體模型,受行人姿態的變化的影響,其運動過程與質點在平面滑移不同。在行人落地瞬間各項運動狀態參數相同的前提下,人-地摩擦因數對于其之后的運動距離有著顯著影響。通過行人地面滑移距離和人-地摩擦因數之間的關系可以發現,對給定摩擦因數做出簡單修正后(減小0.295),其運動規律轉換可為傳統的單體滑移情形,即μs=常數。本案例中,令
式中:C為待定因子,代入s2=4.19,μp=0.82,vc0=47.67,可得C=0.398。于是針對本案例的一般情形,解得:
(6)
式(6)與道路交通事故鑒定標準給出的經驗公式具有相似性。對本案例而言,式(6)則具有更強的針對性。
實際測量中,由于行人路面擦痕測量存在一定的不確定性,實際滑行距離與測量值之間存在一定出入;對于摩擦因數的測量,鑒于環境的復雜性,亦存在一定不確定性。為此考慮行人滑移距離和人-地摩擦因數在某個區間內波動,如服從二維高斯分布,考察上述參數服從一定統計規律下車輛初始速度的分布區間。在后續計算中,為便于表達,令x=s2,y=μp,z=vc0。通過繪制正態概率圖發現,當x,y服從正態分布時,z也能較好地服從正態分布,記
z=f(x,y)
則z的期望和方差[10]:
其中x0=4.19,y0=0.82。代入式(6)可得:
E(z)=47.67-0.370 8D(x)-23.616 1D(y)
(7)
D(z)=38.614 2D(x)+2 459.6D(y)
(8)
對于x的方差,其數量級為10-2,對于y的方差,其數量級為10-3,結合式(7)和式(8)中的系數可以發現y對于z的期望和方差有著顯著影響,其敏感度約為行人滑移位移的6倍。表明準確測量人-地摩擦因數對于提高事故再現的可信度具有重要意義。
取變差系數為0.1,則變量x和y分別服從分布:
x~N(4.19,0.4192),y~N(0.82,0.0822)
根據式(7)和式(8),相應的車速應當服從分布:
z~N(47.45,4.832)
在行人滑移距離和摩擦因數的變差系數均為0.1的情形下,可得車輛初速度95%的置信區間為[42.62,52.27]km/h。因此,在滿足上述測量精度的前提下,對于限速30 km/h的判定標準而言,上述結果可作為超速的判定依據。
從另外的角度看,在車速滿足上述置信區間的前提下,根據正態分布特點,結合正態分布表可知z>30的概率為
因此,認為此情形下事故車輛超速概率達99.98%。記x的變差系數為C1,y的變差系數為C2。變差系數反映了相應的參數測量精度,其與車輛超速概率之間的關系繪制如圖7所示。圖7表明變差系數C2對結果影響的顯著度明顯高于C1,進一步證實了在車-人交通事故再現中人-地摩擦因數的準確測量對于車輛速度判定的重要性。
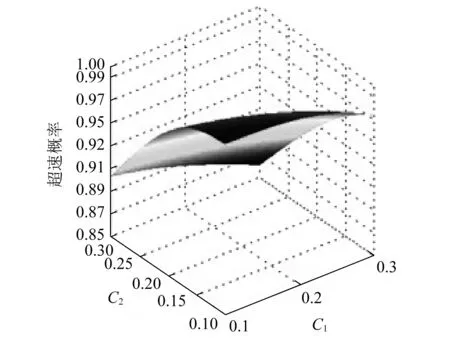
圖7 測量精度與超速概率之間的關系
3 結 論
本文探討了車-人交通事故中人-地摩擦因數對事故再現結果的影響,通過本研究發現:
(1)在車-人交通事故再現中,人-地摩擦因數對事故再現結果精度有顯著影響。對某一特定計算誤差精度要求,推算出相應的人-地摩擦因數取值范圍,由此給出現場勘測的精度要求;人-地摩擦因數對車輛初速度推算也有著極其顯著的影響。通過典型案例分析發現,事故再現計算中人-地摩擦因數的敏感度約為行人地面運動位移的6倍。
(2)交通事故再現中,速度結果通常為定值,而摩擦因數也按常數處理。通過典型案例分析,探討了行人落地姿態計算誤差和人-地摩擦因數范圍之間的關系。其中,在以行人落地質心為第一考察要素的前提下,需對誤差計算模型進行極值修正和邊界條件修正。
(3)將摩擦因數作為不確定性參數,探討車輛初速度結果的合理范圍,實現結果由點向區間的轉化,給出了所述典型案例的超速概率分析,進一步證實了人-地摩擦因數對事故再現結果的高度敏感性。相應的分析方法可以為交通事故中的車速判斷和車-人初始接觸位置等關鍵參數的確定提供依據和參考。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00