潛望式激光通信端機記憶合金驅動解鎖機構
2019-07-08 09:29:28孟令臣孟立新張立中趙洪剛張軼群
振動與沖擊 2019年12期
關鍵詞:振動
孟令臣, 孟立新, 張立中, 趙洪剛, 張軼群
(1.長春理工大學 空間光電技術國家地方聯合工程研究中心, 長春 130000;2.長春理工大學 空地激光通信技術國防重點學科實驗室, 長春 130000; 3.長春理工大學 機電工程學院,長春 130000)
在衛星發射過程中,激光通信端機對振動、沖擊有較高要求,巨大的振動和沖擊載荷會對星載設備造成嚴重損壞,需要在衛星發射過程中鎖緊相關組件,衛星入軌后,將其進行解鎖,使伺服系統組件能夠正常工作[1-5]。傳統的鎖緊方式為火工品驅動,但爆炸產生的高沖擊及污染物會對光學元件、電子設備造成損壞,且可靠性低。據NASA統計,1963年至1988年間600次發射任務,與火工品失效相關故障有84次,其中一半故障導致任務失敗[6-8]。
為解決激光通信端機伺服轉動系統鎖緊問題,歐空局(European Space Agency,ESA)在半導體激光星間鏈路實驗(Semicondutor-laser Inter-satellite Link EXperim ent,SILEX)計劃中發射的ARTEMIS衛星上搭載的激光通信伺服系統所采用的鎖緊機構是利用電磁驅動的偏置彈簧鎖緊機構。其原理是電磁線圈通電產生驅動力實現解鎖動作。但是其鎖緊機構復雜,組件較多,占據空間較大,重量大,在小型衛星上不適用[9]。
在星箭分離、整流罩分離以及大型太陽能帆板的展開等空間分離問題上所采用的分離解鎖機構中存在使用電阻絲熔線機構和記憶合金驅動分離解鎖機構。電阻絲熔線機構不可重復使用,且機構較復雜,輸出大鎖緊力不穩定;記憶合金驅動分離機構大多數是仿照爆炸螺栓的機理,采用分瓣螺母結構,連接時保證完整螺栓連接,分離時,采用記憶合金驅動分瓣螺母破壞螺栓連接,實現分離。該結構很難應用于激光通信端機伺服轉動系統的解鎖上。而且其結構連接相對復雜,在關鍵部件的鎖定上穩定性較差,重量體積相對較大,小衛星上不適用。而目前針對小衛星的鎖緊及解鎖機構中,大部分是從體積重量的限制下手,達到了體積小,重量輕等要求,而其鎖緊力和穩定性卻不能滿足激光通信端機的鎖緊需求[10-14]。
形狀記憶合金(Shape Memory Alloy,SMA)是20世紀60年代發展成熟起來的一種新型功能材料,其特點是具有形狀記憶效應[15-16]。SMA在馬氏體狀態下發生塑性變形,當溫度達到SMA相變溫度時恢復其原始形態,這種可以記憶原始形態的特性稱為形狀記憶效應。SMA在恢復過程中可以輸出一定回復應力和回復應變,通常回復應力為350 MPa左右,回復應變在5%左右。本文利用SMA的形狀記憶效應,結合星載激光通信端機伺服轉動系統組件的鎖緊與解鎖需求,設計提出一種基于SMA驅動的解鎖機構。
1 潛望式光端機鎖緊需求
潛望式激光通信端機伺服系統如圖1,該結構正交布置兩套軸系,一套用于方位旋轉,一套用于俯仰旋轉。要求鎖緊與解鎖機構能在發射過程中鎖定兩套軸系,提高發射剛度,同時入軌后能夠快速解鎖。鎖緊與解鎖機構需要提供足夠大的預載荷,以保證在發射期間的沖擊、振動作用下轉動機構不會損壞,同時能夠在較短時間內實現預載荷的釋放,并保證不會在分離接口處產生任何機械連接。
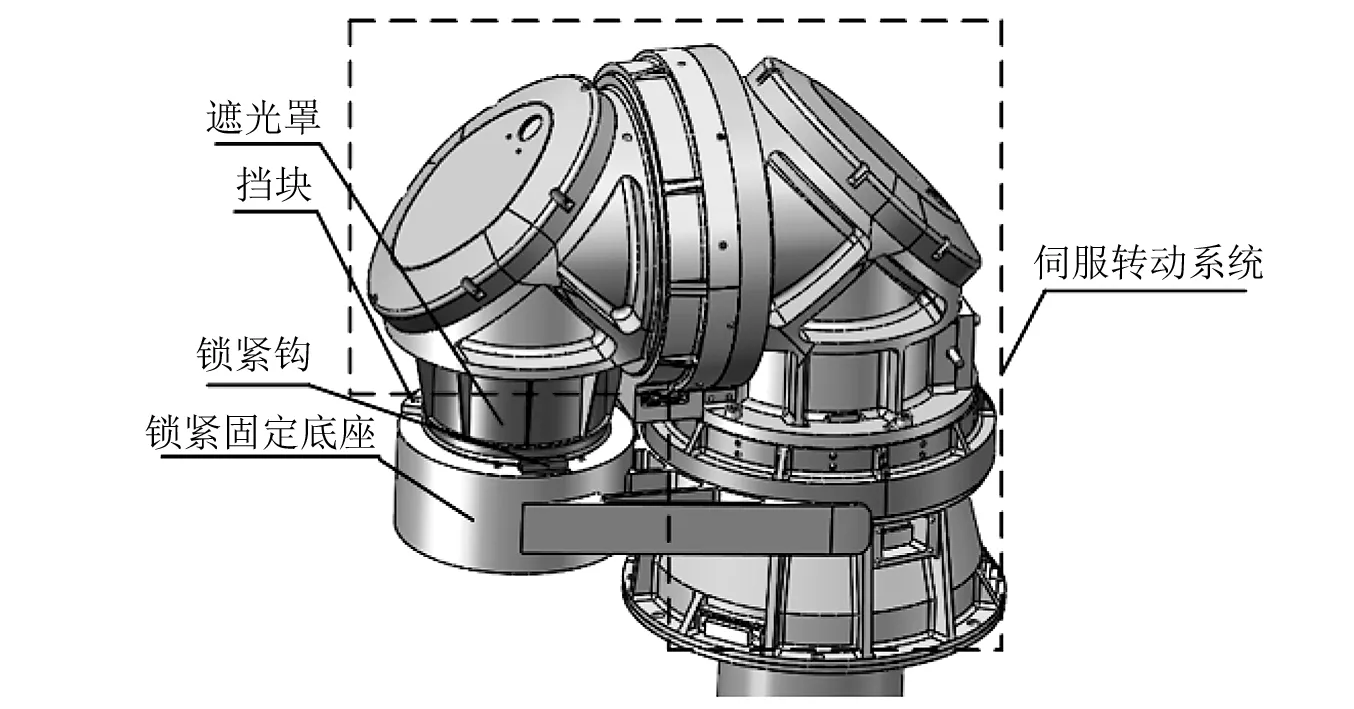
圖1 星載激光通信端機伺服轉動系統
2 SMA絲驅動解鎖結構組成與原理
2.1 結構組成分析
主要結構如圖2所示,SMA絲驅動解鎖機構固定在鎖緊盤上,與鎖緊擋環完全約束遮光罩。SMA絲驅動解鎖機構包括預載荷鎖緊裝置和解鎖驅動執行器。其中,預載荷鎖緊裝置在鎖緊機構的上腔體中,主要由鎖緊鉤和偏置彈簧組成,用來給轉動機構施加預載荷以鎖定轉動機構;解鎖驅動執行器在鎖緊機構的下腔體中,主要由SMA絲、回轉銷軸和SMA絲夾持單元構成,用來實現解鎖動作,提供解鎖驅動力。

圖2 解鎖機構方案圖
為了實現解鎖機構能夠在發射過程中穩定鎖住旋轉機構,如圖7所示鎖緊鉤的上表面設計成圓弧鉤以提高與旋轉機構側壁的接觸面積,提高鎖緊穩定性。鎖緊鉤整體以旋轉銷軸為中心與鎖緊箱體鉸接,根據后續鎖緊力分析,通過調節鎖緊鉤回轉中心與接觸點連線和水平面的夾角α,可以達到鎖緊力的最優化。
SMA絲加熱收縮的位移量與SMA絲長度成正比,此方案中采用銷軸加絕緣軸套進行往復繞絲,減小了SMA絲所占用的空間,并且通過杠桿放大位移原理進一步減短了SMA絲的總長度;為保證SMA絲在大拉力下不至于脫開或者滑動,采用回轉雙面夾持SMA絲方式,結構如圖3所示,確保夾緊SMA絲不發生滑動,以保證鎖緊位置精確,同時在折彎處采用大圓角過度避免應力集中;另外對SMA絲通過和連接的地方全部用聚酰亞胺材料做絕緣隔熱,即可采用直接給SMA絲通電的加熱方式,使其受熱均勻,加快溫度提升速度,提高解鎖驅動執行器的反應速度;為了提高解鎖驅動執行器的可靠性,采用雙路獨立SMA絲同時進行驅動,提供雙保險,保證輸出驅動力遠大于解鎖力。極大提高了鎖緊機構的安全可靠性。
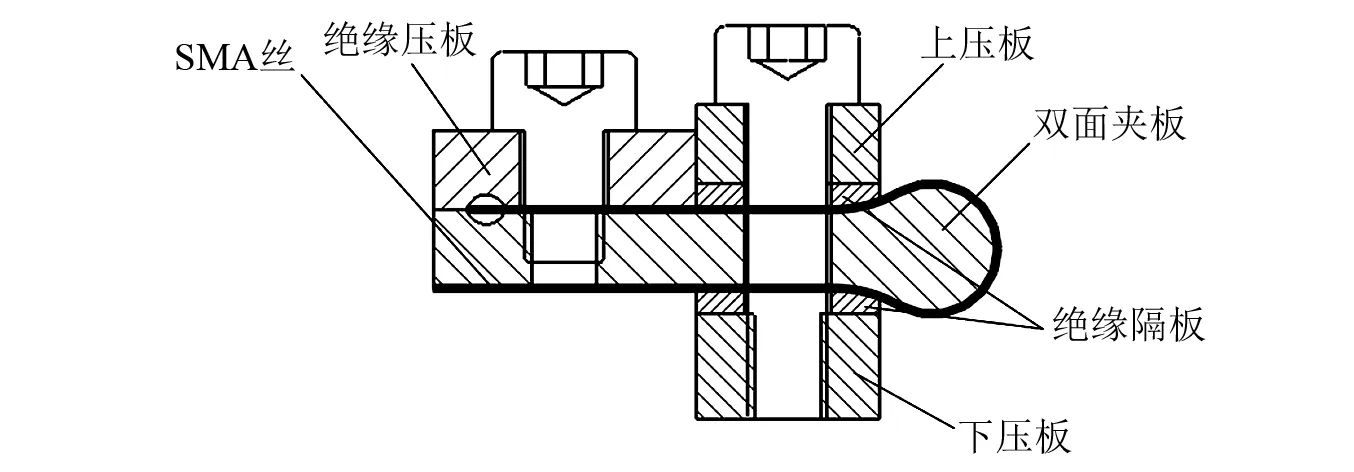
圖3 SMA絲固定方式
2.2 工作原理
SMA絲驅動的解鎖機構的鎖緊原理是偏置彈簧頂住鎖緊鉤,偏置彈簧輸出的彈力提供鎖緊所需的預載荷,達到鎖緊目的;解鎖原理是當控制器發送解鎖指令,SMA絲通電加熱,達到相變溫度后,SMA絲收縮輸出回復應力,從而拉動鎖緊鉤克服偏置彈簧的彈力向下移動,達到解鎖位置時,鎖緊鉤觸發距離傳感器,發送解鎖完成信號至控制系統,設備進行下一步工作。
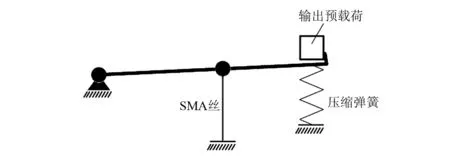
圖4 工作原理簡化圖
工作原理簡化后如圖4所示,其關鍵在于SMA絲與偏置彈簧之間力的平衡關系。相變溫度以下狀態時,SMA絲被偏置彈簧拉長到力的平衡點,達到低溫力平衡狀態,相變溫度以上狀態時,SMA絲彈性模量增大,力平衡狀態被打破,SMA絲收縮偏置彈簧被壓縮到新的平衡點,達到高溫力平衡狀態。
另外的,該解鎖機構可以實現多次使用,當設備需要再次鎖緊固定時候,首先,給SMA絲通電,使鎖緊鉤處于解鎖位置,轉動機構回到預裝位置,此時,釋放鎖緊鉤,SMA絲溫度降低,鎖緊鉤再次鎖定轉動機構。
3 鎖緊力與解鎖力分析
鎖緊力與解鎖力分析關鍵在于SMA絲恢復力與偏置彈簧剛度的一個相互匹配關系。SMA絲的材料屬性決定它存在一個低溫屈服力和高溫恢復力。其應力應變曲線圖,如圖5所示。
從圖5中可以看出SMA絲的低溫屈服應力在100 MPa左右,偏置彈簧的預載荷應該大于該屈服應力,才能夠在低溫時候拉長SMA絲;同時,SMA絲的高溫回復應力達到了350 MPa以上,即偏置彈簧在高溫被SMA絲拉回到解鎖位置時輸出的載荷應該小于該高溫屈服應力。
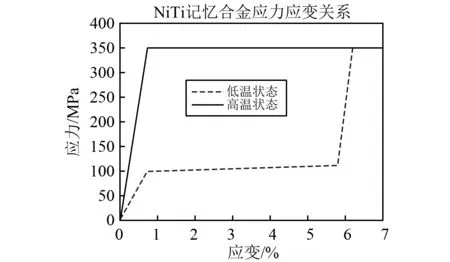
圖5 SMA絲應力應變關系圖
在以上原則和壓縮彈簧設計方法基礎上,通過如圖6可以在限定的空間尺寸下設計出與SMA絲尺寸相匹配的壓縮彈簧。
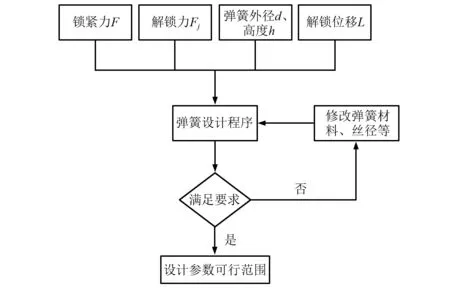
圖6 設計流程圖
3.1 鎖緊力分析
在鎖緊旋轉機構的過程中,對鎖緊鉤與遮光罩接觸位置進行應力分析,如圖7所示,其提供鎖緊的力是偏置彈簧預載荷的水平分力,另外一個分力是沿著鎖緊鉤向外的力。鎖緊力設計要求800 N以上,由于驅動單元SMA絲回復應力和偏置彈簧剛度的限制,需要從鎖緊鉤與遮光罩接觸位置的受力分析結果來優化設計鎖緊鉤,確定角度α,滿足鎖緊力需求的同時降低彈簧剛度的需求。
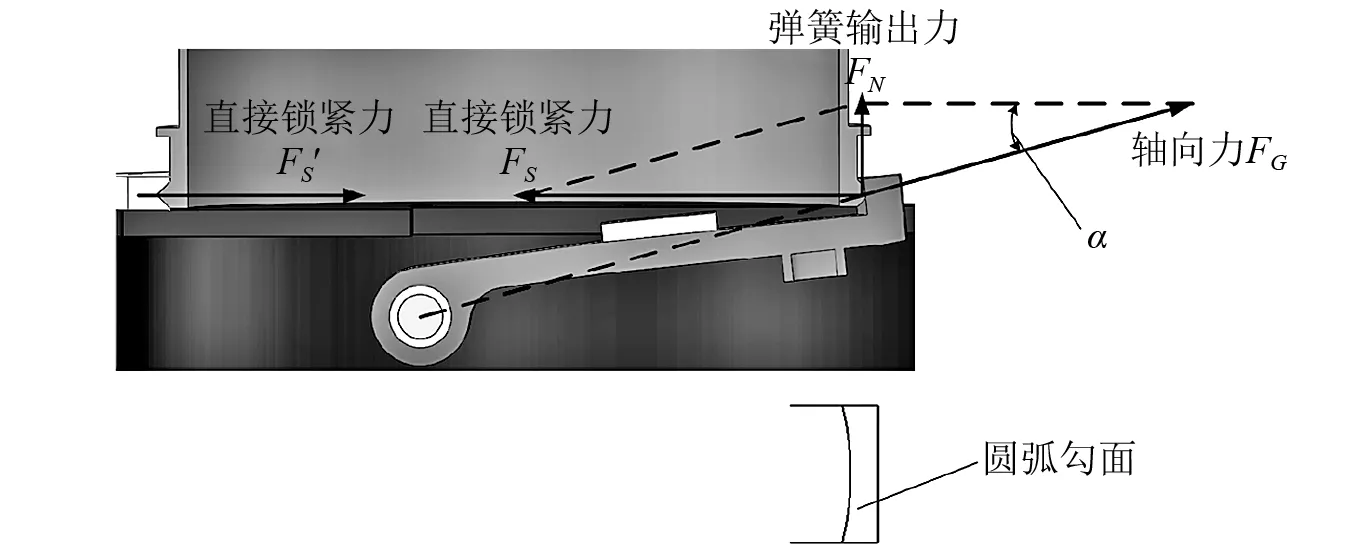
圖7 鎖緊力學分析
根據圖7中的力學分析,FS為鎖緊力,FN為偏置彈簧輸出力,FG為沿鎖緊鉤方向的分力,那么根據力學關系,可以得到
(1)
在實際應用的角度范圍中,FN與FS是近似垂直關系,即
FS=FN/tanα
(2)
由公式(2)得出角度α優化公式,即:
tanα=FN/FS
(3)
星載激光通信端機在發射過程中,其所需的鎖緊力為800 N以上,才能保證伺服系統不會發生破壞。根據上述設計得到偏置彈簧FN輸出范圍為100 ~400 N,彈簧剛度系數k的范圍為15~25,預定鎖緊力FS=1 000 N,根據公式(3)得到角度α范圍為5.7°~21.8°。綜合偏置彈簧標準考慮,取角度α為10°確定鎖緊力FS=1 000 N, 偏置彈簧輸出力FN=176.3 N,剛度系數k取為20。從而保證鎖定旋轉機構,安全系數為1.25。
3.2 解鎖力分析
鎖緊鉤鎖緊端從鎖緊狀態到解鎖狀態需要至少4 mm的位移,考慮機械加工與安裝誤差應用高斯方法將誤差合成到鎖緊端,其綜合誤差為0.05 mm。另外,解鎖完成信號觸發的接近傳感器其精度范圍是0.5 mm,所以鎖緊端位移總量要達到4.55 mm。
為適應航天溫度環境要求,選擇相變溫度在90 ℃的SMA絲,通過拉伸試驗測得其加熱可回復應變εre=5%,取S為設計要求SMA絲的收縮量,那么,滿足要求的SMA絲的總長度為
(4)
在滿足位移要求前提下,為達到鎖緊機構的微型化和輕量化,盡量減少SMA絲的長度以減少其安裝空間。在采用往復繞絲排布方式的同時,該裝置采用杠桿放大位移原理,減少SMA絲的收縮量,從而減短了SMA絲總長度。原理如圖8所示。
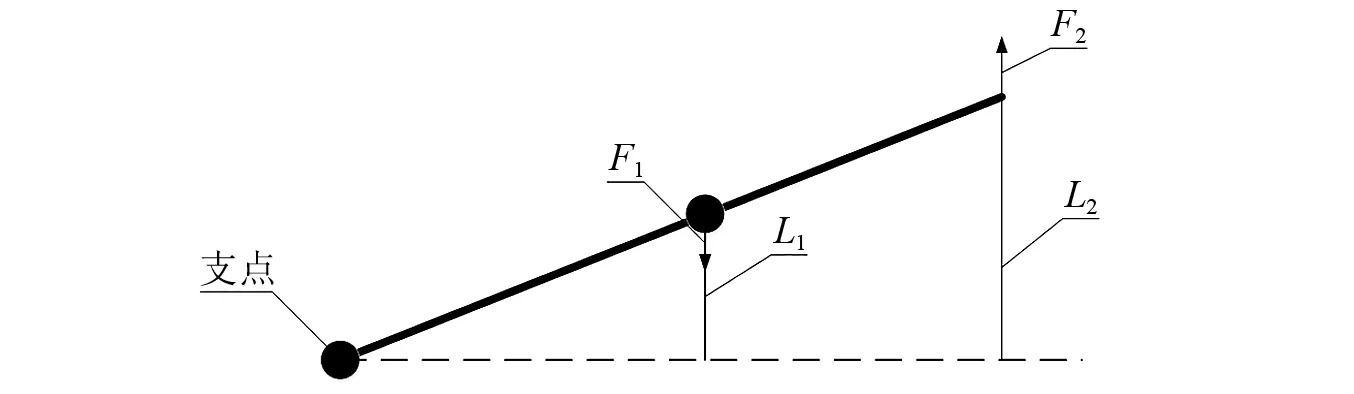
圖8 杠桿放大位移原理圖
動力臂與阻力臂長度比為
(5)
那么,鎖緊端滿足SS≥4.55 m時,SMA絲作用點位移需滿足
即
S≥2.73 mm
通過式(4)可以得到
L≥54.6 mm
根據實際空間安排,經過反復繞絲,SMA絲的實際安裝長度為108.3 mm,遠大于54.6 mm的設計要求,安全系數達到2.0。
所選SMA絲的回復應力可達350 MPa,根據驅動單元設計中偏置彈簧與SMA絲輸出應力的關系,同時滿足鎖緊力要求,需要2根1 mm直徑的SMA絲才能滿足解鎖力的條件。為提高解鎖力的安全系數,保證穩定鎖緊的前提下,能夠安全解鎖,采用冗余設計,使用4根SMA絲。使解鎖驅動力可達1 100 N,安全系數達2.2。既可解鎖時輸出較大拉力,又可在低溫狀態實現鎖定。
4 地面試驗驗證
4.1 鎖緊裝置樣機及功能可靠性試驗
根據以上設計研制鎖緊樣機,樣機整體包絡尺寸為85×43×36 mm,質量為218 g,實現了小型化、輕量化。如圖9所示,為驗證鎖緊機構能否完成設計功能并經受住振動與高溫環境的考驗,將其裝配到潛望式激光通信端機伺服系統整體上進行各項測試實驗。
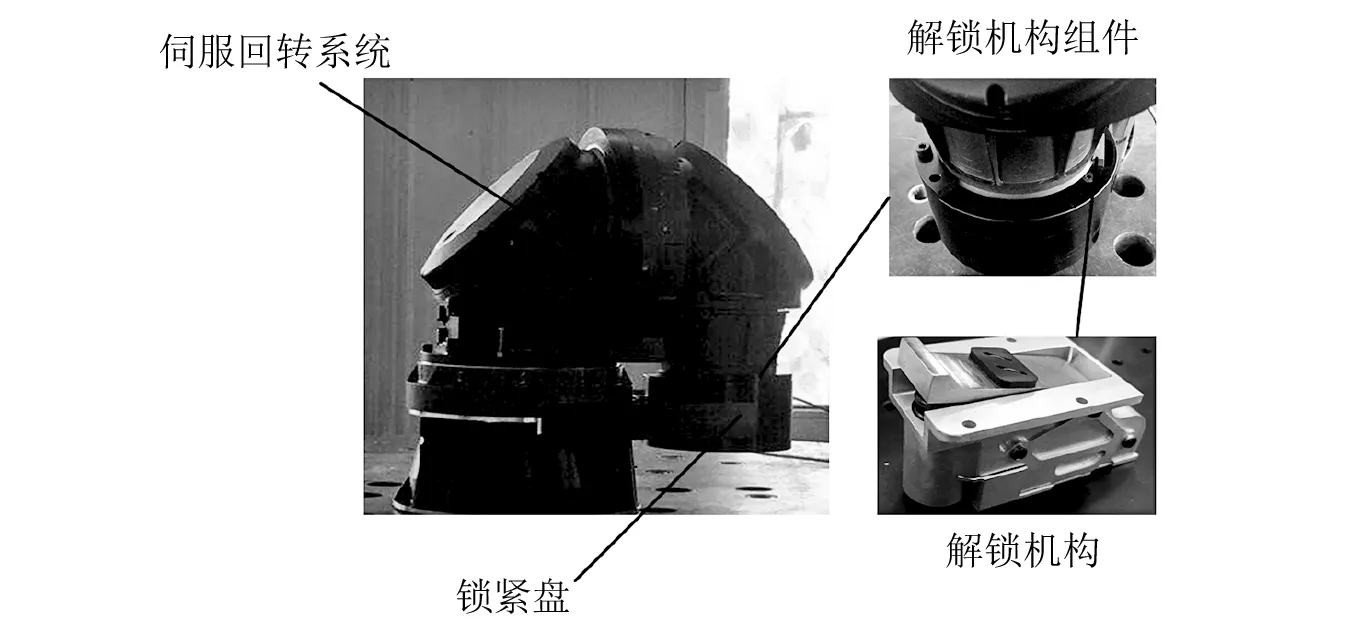
圖9 鎖緊樣機裝配圖
通過壓力傳感器測量,樣機鎖緊階段,鎖緊鉤與遮光罩接觸面上鎖緊力可達到1 012 N,即能滿足鎖緊需求;通過改變通電電流測試解鎖時間,測試曲線如圖10所示,可見,在一定范圍內,解鎖時間與通電電流近似成反比關系,通電電流越大解鎖時間越短。通電電流為2 A時, 解鎖時間為13 s,當提高通電電流到3 A及以上時,解鎖時間穩定到3 s以內,這樣在衛星電源供電情況下,解鎖時間能夠滿足工程要求。
將鎖緊樣機處于鎖緊狀態放入高低溫試驗箱中,標記鎖緊鉤位置,以觀察鎖緊鉤位置變化,并在SMA絲上設置精度為±0.5℃的溫度傳感器,傳感器可隨時監控SMA絲的溫度。當鎖緊鉤位置發生變化,即判定鎖緊失效。設置溫度從50℃開始,并依次在60℃、70℃、80℃、85℃、90℃、95℃、100℃各溫度點保溫30 min,實驗結果表明樣機在低于90℃使不會發生解鎖,滿足航天發射環境要求。
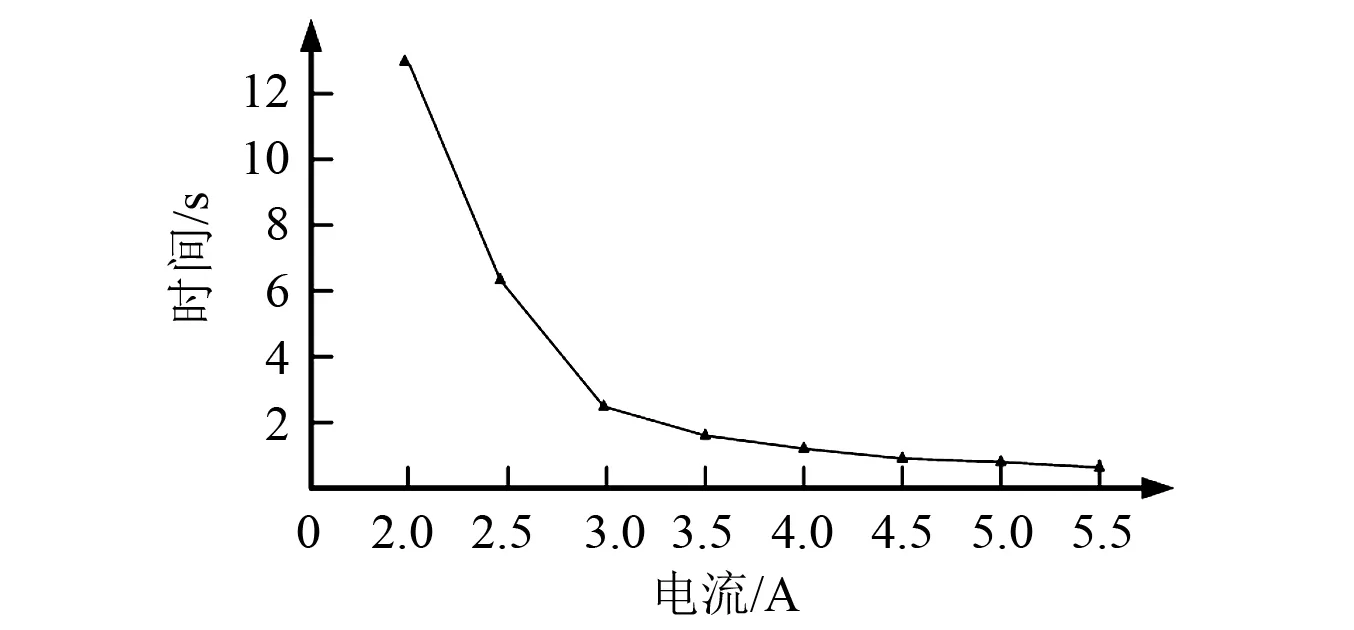
圖10 電流與解鎖時間關系
4.2 振動沖擊試驗
為驗證SMA鎖緊裝置在運輸和發射過程的振動條件下是否會發生鎖緊失效,同時獲得鎖緊機構對整機模態影響,將鎖緊裝置安裝在伺服轉動系統上并通過工裝固定在振動沖擊臺上進行振動沖擊環境試驗,在振動臺和伺服轉動系統上設置加速度傳感器用于控制和測量。振動試驗圖見圖11。
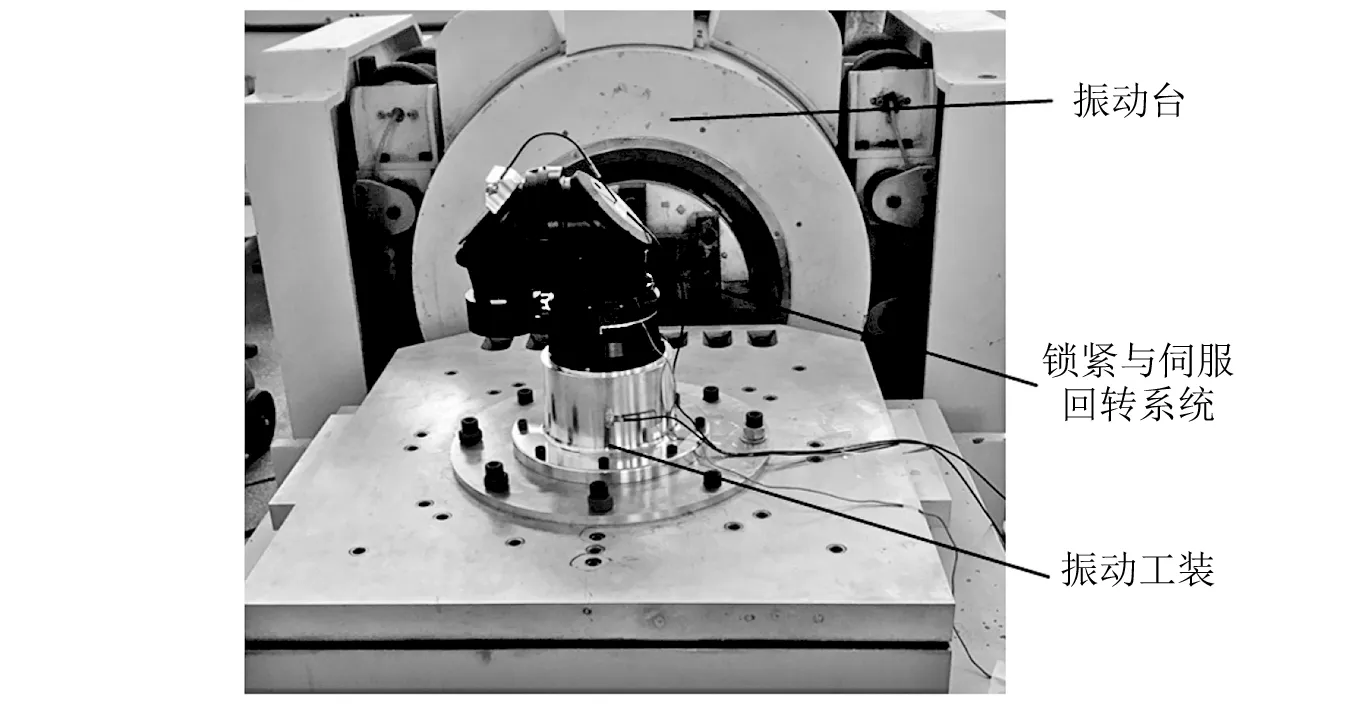
圖11 振動試驗圖
隨機振動實驗控制譜和沖擊響應試驗控制譜如圖12所示,經過X向、Y向、Z向隨機振動與掃頻試驗后,鎖緊與解鎖裝置沒有發生意外解鎖現象。X,Y,Z三個方向的振動實驗結果如表1所示,試驗證明,伺服回轉機構3個方向的均方根加速度放大倍率都很小,說明在鎖緊狀態下鎖緊力對于整機的剛度貢獻滿足要求,鎖緊鉤與遮光罩沒有發生相對位移,說明鎖緊穩定性好;在鎖緊狀態下,伺服回轉機構一階模態全部大于100 Hz,有效避開衛星上低頻振動,滿足發射要求。
隨機振動實驗控制譜和沖擊響應試驗控制譜如圖12所示,經過X向、Y向、Z向隨機振動與掃頻試驗后,鎖緊與解鎖裝置沒有發生意外解鎖現象。X,Y,Z三個方向的振動實驗結果如表1所示,試驗證明,伺服回轉機構3個方向的均方根加速度放大倍率都很小,說明在鎖緊狀態下鎖緊力對于整機的剛度貢獻滿足要求,鎖緊鉤與遮光罩沒有發生相對位移,說明鎖緊穩定性好;在鎖緊狀態下,伺服回轉機構一階模態全部大于100 Hz,有效避開衛星上低頻振動,滿足發射要求。
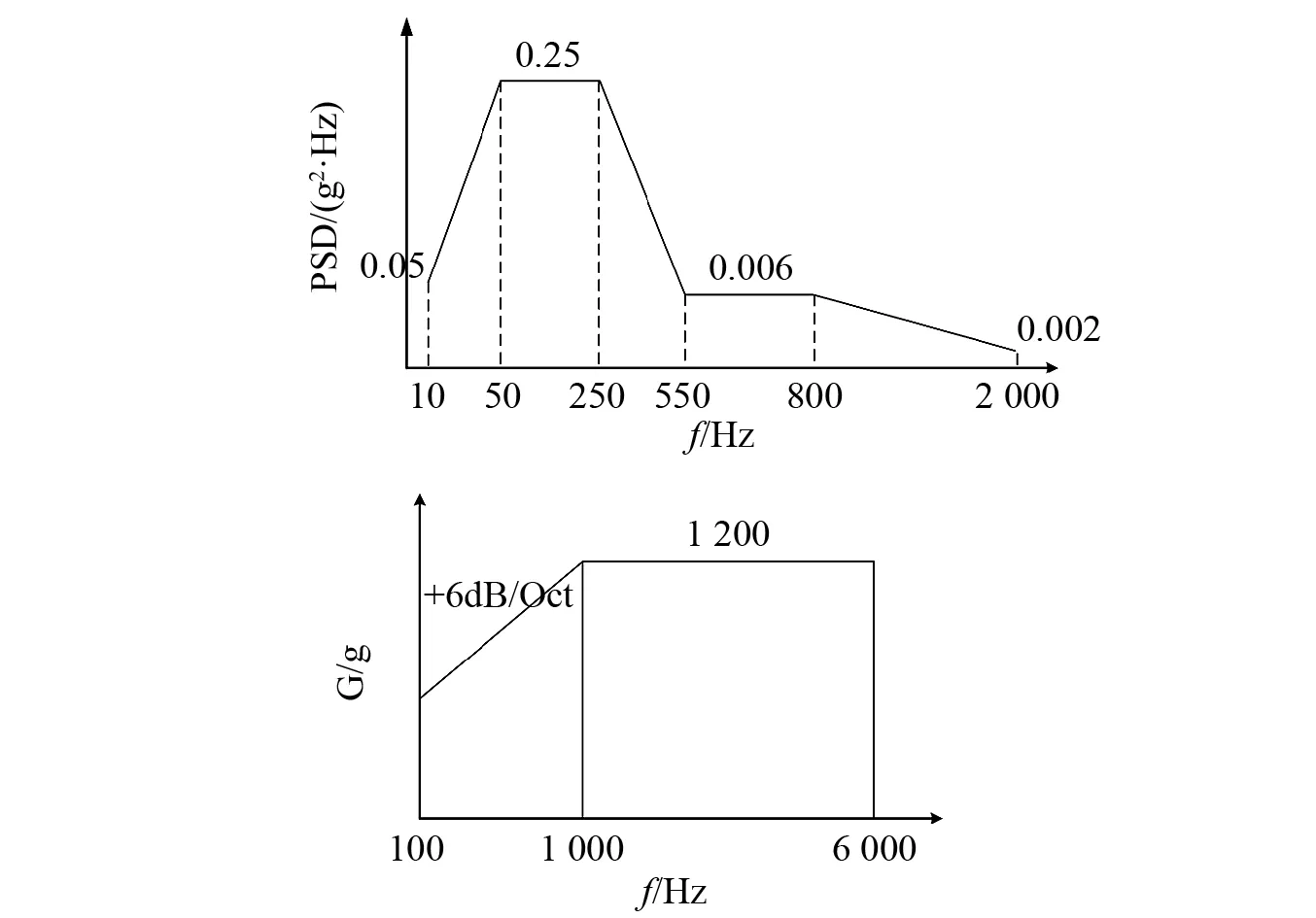
圖12 隨機振動試驗與沖擊響應譜試驗控制譜
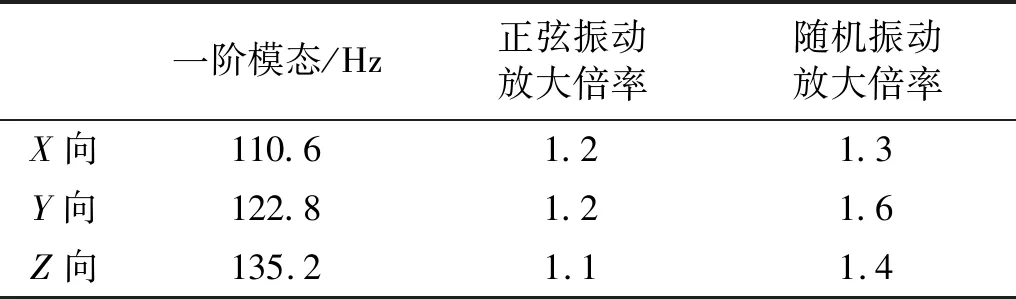
表1 振動試驗結果
星載設備在整個生命周期內,可能經歷各種沖擊環境,如運輸沖擊、點火沖擊等。為驗證SMA鎖緊裝置沖擊載荷下的鎖緊可靠性,進行地面沖擊試驗。試驗結果顯示在1 200 g沖擊下,SMA鎖緊裝置未發生誤解鎖現象,提升了光端機整體抗沖擊性能。
5 結 論
本文針對潛望式激光通信端機鎖緊與解鎖問題,設計研制了基于SMA絲智能材料的SMA鎖緊與解鎖裝置,鎖緊與解鎖裝置采用反向設計的鎖緊鉤利用分力提供鎖緊力放大鎖緊力量可達到5倍,降低彈簧剛度需求,利用杠桿放大位移原理減少了SMA絲伸縮長度,從而減短SMA絲總長度,在有限的包絡尺寸下提高了解鎖可靠性。經過電性能測試,給鎖緊與解鎖機構施加12 V/3 A的電源時,可實現3 s內快速解鎖;高溫性能實驗中鎖緊裝置可在90 ℃以下可靠鎖緊;震動沖擊試驗中,在鎖緊狀態下伺服回轉機構諧振頻率為110.6 Hz滿足發射要求且均未發生誤解鎖現象。該鎖緊裝置實現了小型化輕量化,整機包絡尺寸為85×43×36 mm,質量為218 g。可以為星載小型激光通信伺服回轉機構提供可靠的鎖緊與解鎖功能,具有非常大的工程應用潛力。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00