激光雷達(dá)技術(shù)研究現(xiàn)狀及其應(yīng)用
2019-05-30 03:46:26李鑫慧唐風(fēng)敏
汽車(chē)電器 2019年5期
關(guān)鍵詞:測(cè)量
李鑫慧,郭 蓬,臧 晨,戎 輝,唐風(fēng)敏
(中國(guó)汽車(chē)技術(shù)研究中心,天津 300300)
1 概述
激光雷達(dá) (Light Detection and Ranging,LiDAR)是一種環(huán)境感知傳感器,是雷達(dá)技術(shù)與激光技術(shù)的結(jié)合。由于激光本身具有單色性好、亮度高、分辨率高、靈敏度高等良好特性,這使得以激光為載波的激光雷達(dá)具有距離分辨率高、速度分辨率高、抗干擾能力強(qiáng)、體積小且不受無(wú)線電波干擾等環(huán)境感知優(yōu)勢(shì)。因此激光雷達(dá)在環(huán)境建模、物體檢測(cè)識(shí)別、環(huán)境勘探測(cè)量等領(lǐng)域得到廣泛應(yīng)用。并且相比于傳統(tǒng)微波雷達(dá),在提供更強(qiáng)大感知性能前提下,體積更小質(zhì)量更輕,在市場(chǎng)化產(chǎn)品的應(yīng)用上優(yōu)勢(shì)顯著。
目前市場(chǎng)上激光雷達(dá)產(chǎn)品種類(lèi)眾多,按激光掃描線數(shù)可分為單線激光雷達(dá)和多線激光雷達(dá),按雷達(dá)掃描原理分為旋轉(zhuǎn)式激光雷達(dá)和固態(tài)激光雷達(dá)。其中單線激光雷達(dá)主要應(yīng)用于服務(wù)機(jī)器人,如常見(jiàn)的掃地機(jī)器人,其具有掃描速度快、可靠性高、分辨率強(qiáng)、成本低等優(yōu)點(diǎn),但由于單線激光雷達(dá)只具有單頻點(diǎn)激光的單路發(fā)射器和單路接收器,且多采用機(jī)械旋轉(zhuǎn)式掃描,在應(yīng)用中有一定局限性,不適合復(fù)雜場(chǎng)景。而多線激光雷達(dá)具有多激光光束,且多采用非機(jī)械掃描的固態(tài)相控陣掃描方式,具有更強(qiáng)的環(huán)境感知能力。多線激光雷達(dá)主要應(yīng)用于無(wú)人駕駛汽車(chē),可以實(shí)現(xiàn)實(shí)時(shí)多物體運(yùn)動(dòng)軌跡跟蹤,獲取周?chē)h(huán)境點(diǎn)云構(gòu)建3D環(huán)境模型。但是目前激光雷達(dá)較高的技術(shù)壁壘和成本價(jià)格,使其市場(chǎng)推廣和產(chǎn)品落地受阻。激光雷達(dá)的成本控制是其未來(lái)發(fā)展的主要趨勢(shì),未來(lái)更多供應(yīng)商的加入勢(shì)必會(huì)推動(dòng)激光雷達(dá)解決方案的落地,以及成本的降低[1]。
2 國(guó)內(nèi)外關(guān)于激光雷達(dá)的研究現(xiàn)狀
2.1 國(guó)外激光雷達(dá)研究現(xiàn)狀
自1960年美國(guó)科學(xué)家梅曼研制出第一臺(tái)紅寶石激光器起,用于環(huán)境感知的激光雷達(dá)開(kāi)始被大量研究。相關(guān)研究最先是從激光測(cè)距儀開(kāi)始,在1961年第一臺(tái)軍用測(cè)距儀通過(guò)美軍方檢驗(yàn),進(jìn)入實(shí)際應(yīng)用中,在1971年美國(guó)軍隊(duì)裝備AN/GVS3測(cè)距儀用于軍事偵察。而后激光環(huán)境勘測(cè)從單點(diǎn)測(cè)量,發(fā)展到二維掃描。從90年代開(kāi)始,可以計(jì)算出地形圖像的機(jī)載激光雷達(dá)開(kāi)始被應(yīng)用在地形勘測(cè)中,如1995年美國(guó)TopScan公司開(kāi)發(fā)的機(jī)載地形測(cè)量激光雷達(dá),2003德國(guó)Leica公司研制的ALS50系列地理勘測(cè)激光雷達(dá)。
近年來(lái),隨著激光雷達(dá)的技術(shù)發(fā)展和智能交通的發(fā)展需要,能進(jìn)行三維立體掃描的車(chē)載激光雷達(dá)設(shè)備逐漸落地,產(chǎn)品商業(yè)化的公司有美國(guó)Velodyne公司、法國(guó)的TopoSys公司、德國(guó)IBEO公司和Sick公司等。其中美國(guó)Velodyne公司產(chǎn)品的性能和精度處于國(guó)際領(lǐng)先地位,幾乎成為自動(dòng)駕駛行業(yè)激光雷達(dá)選型的黃金標(biāo)準(zhǔn),其16線、32線、64線的產(chǎn)品被廣泛應(yīng)用在自動(dòng)駕駛車(chē)輛上。不論是國(guó)際高校間的自動(dòng)駕駛比賽,還是諸如谷歌百度等參與自動(dòng)駕駛研究的企業(yè),其研發(fā)出的自動(dòng)駕駛車(chē)輛都能看到Velodyne激光雷達(dá)的身影。
2.2 國(guó)內(nèi)激光雷達(dá)發(fā)展現(xiàn)狀
相對(duì)于國(guó)際研究水平,我國(guó)對(duì)激光雷達(dá)技術(shù)的研究起步較晚,在80年代航天科工研制的激光測(cè)距機(jī)實(shí)現(xiàn)200 m內(nèi)0.5 m誤差的遠(yuǎn)程測(cè)距。另一方面受軍用激光協(xié)會(huì)大力支持,國(guó)內(nèi)研制出紅寶石激光人造衛(wèi)星測(cè)距機(jī)、用于復(fù)雜地形測(cè)繪的飛機(jī)機(jī)載激光航測(cè)儀。在2007年以前國(guó)內(nèi)高校及研究院所在激光技術(shù)層面有不錯(cuò)積累,但是在激光產(chǎn)品商業(yè)化產(chǎn)品化上基本沒(méi)有,主要激光應(yīng)用場(chǎng)景基本依賴(lài)國(guó)外進(jìn)口產(chǎn)品。2007年以后,國(guó)內(nèi)激光雷達(dá)產(chǎn)品才開(kāi)始逐漸被應(yīng)用到軍事、民用以及工業(yè)領(lǐng)域。
隨著國(guó)內(nèi)無(wú)人駕駛行業(yè)和國(guó)際浪潮一起井噴發(fā)展,國(guó)內(nèi)也涌現(xiàn)出幾家激光雷達(dá)廠商。其中以速騰聚創(chuàng)、北科天繪、鐳神智能、思嵐科技、禾賽科技等創(chuàng)業(yè)公司為代表的國(guó)產(chǎn)激光雷達(dá)產(chǎn)品逐漸獲得市場(chǎng)認(rèn)可,并在智能汽車(chē)中使用。但相比國(guó)際領(lǐng)先產(chǎn)品,如Velodyne,國(guó)產(chǎn)激光雷達(dá)在精度、穩(wěn)定性上還有差距,主要以?xún)r(jià)格優(yōu)勢(shì)搶占市場(chǎng)。國(guó)產(chǎn)激光雷達(dá)廠商在原理技術(shù)和生產(chǎn)工藝上仍需跟上國(guó)際步伐。
3 激光雷達(dá)的技術(shù)原理及測(cè)試
3.1 激光雷達(dá)的技術(shù)原理
激光雷達(dá)是一種通過(guò)測(cè)量發(fā)射脈沖激光光束與傳感器接收的反射脈沖光束實(shí)現(xiàn)非接觸式距離測(cè)量和多維度掃描的儀器。激光雷達(dá)通過(guò)對(duì)接收模塊捕獲的反射光束進(jìn)行信號(hào)處理,比如消噪聲重構(gòu),最后結(jié)合強(qiáng)度像和距離像的融合,經(jīng)現(xiàn)實(shí)設(shè)備輸出待測(cè)目標(biāo)的三維圖像[2]。經(jīng)過(guò)激光雷達(dá)處理器解算可得到被觀測(cè)物的立體稠密點(diǎn)云坐標(biāo)數(shù)據(jù),而這些高精度多維數(shù)據(jù)經(jīng)過(guò)特定算法可解算出被觀測(cè)物距離、方向、速度、姿態(tài)等重要參數(shù)。
目前主流的激光雷達(dá)產(chǎn)品主要采用的探測(cè)技術(shù)方案集中在三角測(cè)距激光雷達(dá)和TOF(Time of Flight)激光雷達(dá)兩種。
3.1.1 三角測(cè)距激光雷達(dá)
基于三角測(cè)量法激光雷達(dá)由激光發(fā)射器和接收器兩部分組成,其中接收器一般采用線性CCD或線性CMOS,接收器可看作小孔成像模型。發(fā)射器發(fā)出激光,當(dāng)光束到達(dá)物體表面后發(fā)生反射,反射光束再被接收器捕獲。發(fā)射器與接收器之間存在一定間隔,稱(chēng)之為基線長(zhǎng)度。基線長(zhǎng)度的存在使得當(dāng)物體與激光雷達(dá)的距離改變時(shí),接收器內(nèi)部CCD接收到激光光束的位置點(diǎn)也隨之改變。該類(lèi)型的激光雷達(dá)可以根據(jù)三角公式,計(jì)算出觀測(cè)物的距離。
三角測(cè)距激光雷達(dá)的原理圖如圖1所示,該方案的測(cè)量精度受被觀測(cè)物距離遠(yuǎn)近的影響較大。一旦物體距離較遠(yuǎn),其反射光點(diǎn)會(huì)聚集于o附近,極大地?fù)p失距離分辨率。
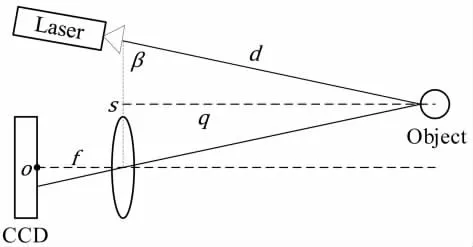
圖1 三角測(cè)距激光雷達(dá)原理圖
根據(jù)原理圖可知基線長(zhǎng)s,與發(fā)射器Laser光軸夾角為β,觀測(cè)物Object與基線距離q。接收器滿(mǎn)足小孔成像模型,鏡頭與CCD芯片的焦距為f。線性CCD中點(diǎn)為o,反射光軸在CCD上投射點(diǎn)與o距離為x。則有:

式中:f——焦距;q——觀測(cè)物與基線距離;o——CCD中點(diǎn);s——基線長(zhǎng);x——接收點(diǎn)與o距離;β——發(fā)射器與光軸夾角。
3.1.2 TOF (Time of Flight) 激光雷達(dá)
TOF是一種利用光飛行時(shí)間的光學(xué)測(cè)距方式,大量應(yīng)用于激光雷達(dá)、深度攝像頭等三維深度感知傳感器上。TOF激光雷達(dá)主要由發(fā)射器、接收器、高精度計(jì)時(shí)器組成。激光發(fā)射器發(fā)射出已調(diào)制的激光光束,光束到達(dá)觀測(cè)物表面并反射回接收器。TOF激光雷達(dá)的原理圖如圖2所示,TOF激光雷達(dá)雖然體積小、抗干擾性強(qiáng),但是其測(cè)量分辨率受計(jì)時(shí)器計(jì)時(shí)精度限制,且功耗較大。
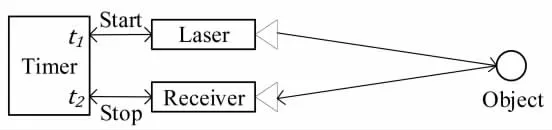
圖2 TOF激光雷達(dá)原理圖
TOF激光雷達(dá)內(nèi)部計(jì)時(shí)器記錄下激光發(fā)射時(shí)刻t1和接收時(shí)刻t2,如圖2所示,時(shí)間差即被稱(chēng)為光飛行時(shí)間。由于光速c已知,即可通過(guò)以下公式計(jì)算出觀測(cè)物距離d:
式中:t1——發(fā)射時(shí)刻;t2——接收時(shí)刻;c——光速;d——觀測(cè)物距離。
3.2 激光雷達(dá)的測(cè)試技術(shù)
激光雷達(dá)在自動(dòng)駕駛領(lǐng)域的快速發(fā)展快速應(yīng)用,然而目前市場(chǎng)尚未存在針對(duì)激光雷達(dá)測(cè)試的統(tǒng)一標(biāo)準(zhǔn)。各大廠商在發(fā)布自家車(chē)載激光雷達(dá)產(chǎn)品的同時(shí),均給出自家產(chǎn)品相關(guān)的測(cè)試數(shù)據(jù)文檔。結(jié)合各大廠家測(cè)試報(bào)告的內(nèi)容,激光雷達(dá)測(cè)試項(xiàng)目可劃分為室外場(chǎng)景和室內(nèi)場(chǎng)景兩大主要方面。
對(duì)于室外場(chǎng)景,測(cè)試項(xiàng)目主要包括:激光雷達(dá)測(cè)距能力、各通道測(cè)距一致性、行人檢測(cè)能力、車(chē)輛檢測(cè)能力、電線桿檢測(cè)能力、障礙錐檢測(cè)能力。通過(guò)激光雷達(dá)在不同測(cè)試環(huán)境、不同距離下記錄點(diǎn)云效果,進(jìn)行各項(xiàng)能力的對(duì)比和評(píng)估。
對(duì)于室內(nèi)場(chǎng)景,測(cè)試項(xiàng)目主要包括:無(wú)效點(diǎn)對(duì)比測(cè)試、墻面厚度對(duì)比測(cè)試、邊緣效應(yīng)對(duì)比測(cè)試等。無(wú)效點(diǎn)對(duì)比測(cè)試是將激光雷達(dá)放置于被測(cè)環(huán)境中,測(cè)試無(wú)效點(diǎn)所占百分比。墻面厚度對(duì)比測(cè)試是將激光雷達(dá)垂直于墻面并保持水平,統(tǒng)計(jì)激光雷達(dá)距墻面不同時(shí)墻面的點(diǎn)云分布,主要用于測(cè)試激光雷達(dá)的測(cè)量精度。邊緣效應(yīng)對(duì)比測(cè)試是將標(biāo)定板部分靠在墻體上,觀察未靠在墻壁部分的邊緣的雜點(diǎn)數(shù)。
4 激光雷達(dá)的應(yīng)用
伴隨著軟硬件的研發(fā)生產(chǎn)水平提升,激光雷達(dá)在不同領(lǐng)域有很多成功的應(yīng)用,其主要被應(yīng)用于:大氣環(huán)境監(jiān)測(cè)、城市三維制圖、智能汽車(chē)及智慧交通等場(chǎng)景。
4.1 大氣環(huán)境監(jiān)測(cè)中的應(yīng)用
由于激光具有探測(cè)波長(zhǎng)短、波束定向性強(qiáng)和能量密度高的特性,激光雷達(dá)最初便被廣泛應(yīng)用于測(cè)量大氣參數(shù),如云的高度和密度、云粒子特性、微量氣體濃度、溫濕度、氣壓、風(fēng)場(chǎng)等[3]。氣象激光雷達(dá)包括:彈性反向散射激光雷達(dá)、差分吸收激光雷達(dá)、拉曼激光雷達(dá)、多普勒激光雷達(dá)。
其應(yīng)用形式分為地基 (Ground-based)和機(jī)載 (Airborne)兩種。激光雷達(dá)在地面時(shí),首先可利用大氣的反向散射可直接測(cè)量云粒子和氣溶膠的分布情況,其次在特殊的波長(zhǎng)和偏振下還可測(cè)得風(fēng)場(chǎng)或卷云冰晶的狀態(tài),另外通過(guò)測(cè)量反向散射光的頻率可測(cè)得光束方向上的溫度和風(fēng)速。而機(jī)載激光雷達(dá)通常采用差分吸收法,將波長(zhǎng)調(diào)制到待測(cè)氣體成分的激光吸收線,利用兩個(gè)或多個(gè)間隔相近的波長(zhǎng)來(lái)分解地面的表面反射率以及其他傳輸損耗,測(cè)量出地面對(duì)不同激光波長(zhǎng)的表面反射率,從而確定對(duì)應(yīng)的氣體成分在大氣中的混合比,常用于測(cè)量二氧化碳、甲烷、臭氧等氣體。
4.2 城市三維建模中的應(yīng)用
在城市化和工業(yè)化進(jìn)程中,具有城市三維模型的數(shù)字化城市規(guī)劃系統(tǒng)能助力于優(yōu)化城市建設(shè)、社會(huì)建設(shè),這使得城市規(guī)劃管理部門(mén)迫切需要高精度遙感地理信息系統(tǒng)來(lái)促進(jìn)城市地區(qū)的可持續(xù)發(fā)展。在城市遙感解決方案中,激光雷達(dá)是目前用于構(gòu)建城市三維模型的技術(shù)中最準(zhǔn)確、快速的測(cè)繪技術(shù)。
典型的激光雷達(dá)由飛機(jī)、無(wú)人機(jī)操作,利用激光雷達(dá)獲取的城市建筑點(diǎn)云,融合機(jī)載GPS或慣性測(cè)量單元(IMU)等信息,快速構(gòu)建數(shù)字城市三維模型[4]。建模的過(guò)程包括對(duì)點(diǎn)云的濾波預(yù)處理、點(diǎn)云分割和特征提取、匹配點(diǎn)的配準(zhǔn)等,而這些目前在城市建模已有較為成熟的方案。
4.3 智能汽車(chē)及智慧交通領(lǐng)域中的應(yīng)用
激光雷達(dá)在智能汽車(chē)的輔助駕駛和安全保障上有大量應(yīng)用,包括自動(dòng)泊車(chē)系統(tǒng)、自動(dòng)巡航系統(tǒng)、緊急制動(dòng)輔助系統(tǒng)、無(wú)人駕駛系統(tǒng)等。在自動(dòng)泊車(chē)系統(tǒng)中,激光雷達(dá)被安裝于車(chē)頂或車(chē)身四周,用于檢測(cè)停車(chē)位位置、感知周?chē)?chē)輛等障礙物,為車(chē)輛控制決策系統(tǒng)提供環(huán)境輸入[5]。在無(wú)人駕駛系統(tǒng)中,需要融合多種傳感器的數(shù)據(jù)來(lái)實(shí)現(xiàn)環(huán)境感知,而激光雷達(dá)在其中提供著重要且詳細(xì)的環(huán)境信息,用于自動(dòng)駕駛車(chē)輛的高精三維地圖構(gòu)建。
在智慧交通領(lǐng)域,激光雷達(dá)被應(yīng)用在交通監(jiān)控、交通執(zhí)法、自動(dòng)電子收費(fèi)等系統(tǒng)中。在交通監(jiān)控中,通過(guò)激光雷達(dá)能獲取到比視頻監(jiān)控更為精確的車(chē)流點(diǎn)云數(shù)據(jù),在對(duì)海量車(chē)流數(shù)據(jù)分析的基礎(chǔ)上智能化控制交通信號(hào),調(diào)度車(chē)流。
5 結(jié)語(yǔ)
激光雷達(dá)近幾年發(fā)展迅速,相比國(guó)際產(chǎn)品性能,國(guó)產(chǎn)激光雷達(dá)技術(shù)仍需持續(xù)攻堅(jiān)投入。激光雷達(dá)在各領(lǐng)域均存在專(zhuān)用激光雷達(dá)設(shè)備的廣泛應(yīng)用,但行業(yè)仍需一套統(tǒng)一化規(guī)范化測(cè)試標(biāo)準(zhǔn)。激光雷達(dá)在自動(dòng)駕駛領(lǐng)域受到了極大的關(guān)注,不僅提高了汽車(chē)的輔助性安全性,更為今后無(wú)人駕駛的實(shí)現(xiàn)提供可能。未來(lái)在各方企業(yè)和科研單位的推動(dòng)下,激光雷達(dá)技術(shù)將會(huì)得到進(jìn)一步發(fā)展,同時(shí)將會(huì)應(yīng)用到更多不同的場(chǎng)景和領(lǐng)域。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
