一種考慮加速度需求的車速自適應控制方法
2019-02-14 02:29:40熊璐付志強柏滿飛章仁燮
西安交通大學學報 2019年1期
熊璐,付志強,柏滿飛,章仁燮
(1.同濟大學汽車學院,201804,上海;2.同濟大學中德學院,201804,上海)
智能車運動控制包含橫向控制和縱向控制,其中縱向控制是通過控制油門和制動來達到上層系統規劃出的期望車速和期望加速度[1]。由于車輛模型參數具有不確定性及非線性的特點,提高車輛縱向控制方法的魯棒性具有重要研究價值。
縱向控制方法主要有比例積分微分(proportion integral derivative,PID)控制、基于車輛模型的閉環反饋控制和自適應控制等方法。趙盼提出了利用專家規則的PID車速控制方法,建立了油門和剎車的協調切換邏輯,根據專家規則來調整PID參數[2]。Zhou提出了一種增量式PD模糊邏輯控制器,利用車速跟蹤誤差和誤差的變化率作為輸入進行調節,有效地降低了車速穩態誤差[3]。陳剛等提出了一種模糊自適應PID控制方法,利用模糊控制方法實現參數自適應整定[4]。但是針對車輛縱向控制的非線性特點,這些PID控制方法需要調節很多參數,并且忽略了外界環境不確定性可能會引起系統的不穩定。還有一部分方法是利用車輛動力學模型進行反向求解來控制輸入。Shakouri等使用了線性化的車輛模型來設計增益調度的線性二次方程,將其分別作用于油門和制動[5]。Attia等提出了基于動力傳動系統動力學模型的車速控制方法,分別控制油門和制動輸入,并分析了系統的穩定性,但是沒有考慮加速度需求[6]。Zhu等提出了基于模糊控制的加速度控制方法,基于建立的車輛模型分別設計了油門和制動模糊控制器,仿真結果表明控制效果優于傳統PID控制[7]。為了考慮車輛參數的不確定性和外部干擾,文獻[8-9]提出了基于時變參數的自適應加速度控制器,通過改進后線性化的車輛模型設計自適應控制律,該方法不需要復雜的車輛模型及參數,即可達到很好的跟蹤效果。
綜上所述,大部分文獻都忽略了道路阻力變化對縱向控制的影響,而且都是單一的車速控制或者加速度控制,沒有同時考慮到車速控制過程中的加速度需求。因此,本文考慮了道路阻力的變化,針對時變參數采用自適應遺忘因子遞歸最小二乘法(forgetting-factor recursive least square method,FFRLS)對道路阻力進行估計,并且基于條件積分方法分別設計車速控制律和加速度律,通過一階系統積分的自動調節保證了車速控制和加速度控制的協調切換,使得縱向控制在大誤差下幾乎沒有超調。通過仿真和實車試驗驗證了本文自適應控制方法的有效性,并且驗證了在坡度路面上,本文方法的跟蹤效果優于未加入道路阻力估計器的跟蹤效果。
1 車輛縱向動力學模型
根據車輛縱向運動過程中的受力狀態,在不考慮縱向和側向耦合的情況下,忽略轉向在縱向的分力,假設車輛行駛在坡度角為α的道路上,車輛縱向受力可以簡化為如圖1所示的單輪模型。

Ft:行駛驅動力;Fw:空氣阻力;Ff:滾動阻力;vx:縱向車速;Tj:驅動輪力矩圖1 單輪車輛模型
車輛的整體縱向運動方程為
Ft=Fw+Fψ+Fj
(1)
式中:Fj為加速阻力;Fψ為道路阻力,Fψ=Ff+Fi,Fi為坡度阻力。
對于前驅車輛,將縱向受力代入式(1)可得
(2)
2 考慮加速度的車速自適應控制方法
基于車輛縱向動力學模型,采用FFRLS對道路阻力進行估計,將縱向動力學模型中的非線性項通過前饋進行抵消,并分別建立基于條件積分方法的車速和加速度控制律,設計過渡控制律將其耦合,建立切換策略保證車速能夠快速跟蹤并且在此過程中不會出現超調。
2.1 道路阻力估計
汽車行駛過程中,驅動力用來克服空氣阻力、加速阻力、道路阻力,其中空氣阻力可以通過查閱相關參數計算得到,加速阻力可以利用慣導得到的加速度計算得到,但是道路阻力與道路條件有關,無法直接獲得。道路阻力包括滾動阻力和坡度阻力,占行駛阻力的一大部分,是影響車輛縱向動力控制的重要參數,因此需要設計估計器進行估計。
對于漸變參數的估計,傳統的FFRLS采用定值遺忘因子能使估計值較快地收斂,但是對于突變的參數的估計,傳統的FFRLS由于遺忘因子取為大于0.9的定值,歷史數據的權重很大,導致估計值不能快速地收斂。因此,本文采用自適應FFRLS,通過定義遺忘因子的自適應法則來優化估計方法的性能[10]。


(3)
式中:L(k)為遞推增益;P(k)為協方差;λ為遺忘因子,取值區間為(0,1]。遺忘因子的大小關系著辨識精度和收斂速度,取值必須綜合考慮。
設遺忘因子的初值為λ0,根據觀測向量縱向力的預測誤差來確定遺忘因子的取值。觀測向量縱向力的預測誤差和預測誤差的方差分別為
(4)

當預測誤差的方差超過事先設定的閾值時,需要立刻減少遺忘因子至λ′,之后隨著樣本數據的增加再慢慢增大遺忘因子,降低估計值對噪聲的敏感性。實際的遺忘因子計算公式為
(5)
2.2 車速跟蹤控制方法
車速控制律基于條件積分方法,能夠防止由于執行器約束而長時間無法鎮定系統、因而導致積分運算發散從而使控制方法失效的現象[11],并且能夠保證設計的運動學控制器控制律有界。不考慮輪胎出現滑移,對于前輪驅動的車輛,設控制律為uT∈[-Tmax,Tmax],式中:uT為前輪驅動力矩;Tmax為最大驅動力矩取值,需要綜合考慮電機的驅動性能和地面附著系數。Tmax的計算公式為
(6)
式中:Pn為電機額定功率;it為電機到車輪的傳動比;nn為電機額定轉速;μ為路面附著系數;Fz為前軸垂向載荷。
不考慮輪胎滑移,將式(1)和(2)轉換為
(7)
將式(7)轉換為鎮定系統,車速跟蹤誤差ev=vd-vr,式中vr是實際車速,vd是期望車速。令uT=TF,通過驅動力矩轉換得到
(8)

(9)
式中:Tf為前饋計算中間轉化量;Tfore為前饋控制率;sgn為符號函數。
(10)
式中:k0和θ0為車速控制器參數,均大于0;σ為積分中間變量;sat為飽和函數。
當積分運算未飽和時,即|s1|<1時,將式(10)代入閉環系統中可得
(11)
建立李雅普諾夫函數V如下
(12)

當|s1|≥1時,積分運算中間變量σ收斂于ΔT,控制律收斂于最大值,此時積分運算的導數為
(13)

2.3 耦合的車速和加速度控制方法
為了在跟蹤期望車速的過程中滿足上層系統的期望加速度需求,本文將加速度控制模式由加減速度跟蹤控制模式和加減速度過渡控制模式組成,將車速控制律和加速度控制律耦合,基于條件積分算法設計了加速度控制律,通過積分自動調節和建立切換策略,保證了車速控制模式和加速度控制模式的平滑切換。
2.3.1 車速控制模式和加速度控制模式的切換策略 本文提出的自適應控制方法一共有3種控制模式——車速控制模式、加速度跟蹤控制模式、加速度過渡控制模式,其中加速度過渡控制模式是為了使加速度跟蹤控制模式能平順地切換到車速控制模式。本文方法需要制定車速控制模式和加速度控制模式之間切換的策略,并確定車速控制區間、加速度跟蹤控制區間、加速度過渡區間,以及各個區間之間切換的條件,切換策略示意如圖2所示。
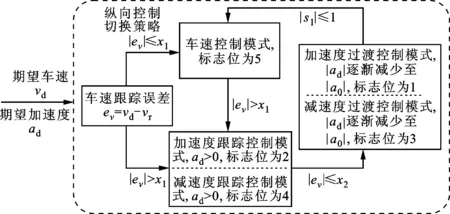
圖2 切換策略示意圖
首先需要設置車速控制閾值x1,當車速跟蹤誤差|ev|>x1時,進入到加速度跟蹤控制模式,該模式具體分為加速度跟蹤控制模式和減速度跟蹤控制模式,分別對應標志位2和4;設置車速控制閾值x2,如果車速跟蹤誤差的絕對值減少到設定的閾值|ev|≤x2(x2≤x1),則切換到加速度過渡控制模式,具體分為加速度過渡控制模式和減速度過渡控制模式,分別對應標志位1和3;設置加速度控制閾值a0,之后如果實際車速跟蹤上期望車速,通過積分自動調節,期望加速度絕對值逐漸收斂到較小值a0,有效避免了切換過程中出現的抖動,平滑切換到車速控制模式,即|ad|≤|a0|,對應標志位為5。若開始車速誤差|ev|≤x1,則進入車速控制模式,之后如果期望車速變化太快導致車速誤差大于閾值x1,則切換到加速度跟蹤控制模式。
2.3.2 加速度控制算法設計 基于車輛縱向動力學方程,利用條件積分算法設計加速度控制律。與車速控制律類似,定義加速度跟蹤誤差ea=ad-ar,式中ar表示實際加速度,引入積分運算,滿足執行器約束,則加速度控制律為
(14)
式中:θa和ka為控制器設計參數,均大于0。
根據條件積分算法的飽和特性,在車速控制律飽和時,用加速度控制律代替車速控制飽和時的控制律,將兩者耦合在一起,即當車速跟蹤誤差|ev|>x1時,令積分系數k0取較大的值使其快速飽和,達到跟蹤期望加速度的目的,此時有
(15)
2.3.3 過渡控制律設計 傳統的車速控制器和加速度控制器都是兩個不同且相互獨立的控制器,當從加速度控制模式切換到速度控制模式時,車速不可避免地會出現抖動甚至是嚴重超調,進而影響系統的穩定性。本文利用一階系統積分的收斂特性來設計過渡控制律。由于一階系統的特性,在加速度控制模式時,積分運算中間變量σ逐漸收斂于ΔT。當車速誤差絕對值小于設定的閾值x2時,控制模式從加速度控制模式進入到過渡控制模式,在過渡過程中期望加速度為a0,此時加速度控制律為ua0,利用這一特性,將過渡控制律設計為
(16)
此時,控制律逐漸收斂于ua0,加速度也逐漸減小至a0。積分系數k0決定了收斂速度,若收斂速度太快,則不能保證快速地跟蹤車速,若收斂太慢,則會降低車速跟蹤的平順性。因此,k0的取值需要滿足當σ收斂到ua0時,控制模式剛好進入到車速控制模式。假設加速度在過渡控制模式中是均勻減小的,車速誤差閾值x2與加速度及收斂時間t0的關系為
(17)
為了獲得積分系數k0與收斂時間t0的關系,仿真了不同σ收斂到ua0的時間,結果見表1。

表1 積分系數與收斂時間的關系
通過擬合表格中的數據及結合式(17)可得
(18)
2.3.4 控制算法穩定性分析 耦合的控制算法在車速控制階段的穩定性已經證明,過渡控制過程中一階系統的控制律逐漸收斂,在加速度控制階段,當積分未飽和時,代入到閉環系統中可得
(19)
建立李雅普諾夫函數如下
(20)

3 仿真試驗
為了驗證道路阻力估計器的準確性以及本文方法的跟蹤效果,在Carsim軟件中搭建相同的車輛模型,車輛參數如表2所示。通過Simulink/Carsim聯合仿真來驗證控制策略的有效性,根據仿真效果來調整不同模式下耦合的控制器參數,結果如表3所示。

表2 車輛參數
①:質心到前軸的距離;②:質心到后軸的距離;③:車輛橫擺轉動慣量。
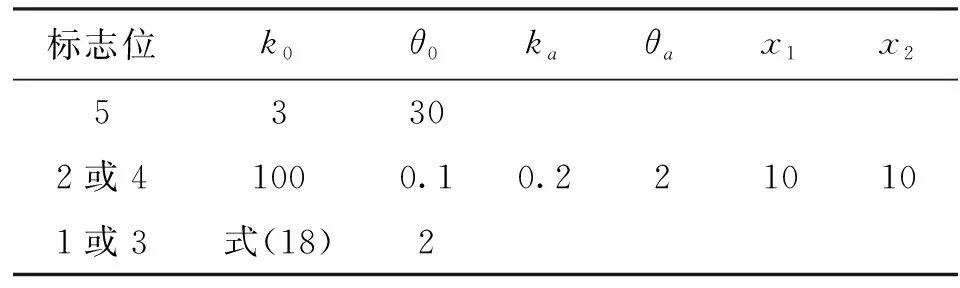
表3 控制器參數
3.1 道路阻力估計器仿真試驗
在縱向控制中,為了驗證道路阻力估計器的估計效果,對比了實際的道路阻力和估計的道路阻力之間的誤差。估計的道路阻力如圖3所示,仿真工況如下:車速為30 km/h;路面為水平路面和6°坡度路面;附著系數均為0.85。
車輛在水平路面行駛時,只有滾動阻力和未知阻力。從圖3中可以看出,估計的道路阻力在不到1 s內就收斂到了穩定值285 N。計算的滾動阻力為188 N,因此未知阻力為97 N。在坡度路面,車輛受到了較大的坡道阻力。圖3中估計的道路阻力為1 465 N。計算的道路阻力為1 434 N,未知阻力取水平路面的97 N,因此實際的道路阻力為1 631 N。估計的道路阻力與實際的道路阻力誤差為4.1%,在可接受的范圍內,該估計器的效果得到了驗證。
3.2 本文方法仿真試驗
為了驗證本文方法在水平路面和坡度路面的控制效果,設置以下2種試驗工況。
工況一:水平路面,路面附著系數為0.85。第1組試驗是期望車速從0逐漸加速到50 km/h,再逐漸回到0,車速控制仿真效果如圖4所示;第2組試驗是為了驗證在車速跟蹤誤差較大時的跟蹤效果,期望車速從0階躍加速到50 km/h,期望加速度為2 m/s2,再減速到20 km/h,期望減速度為-3 m/s2,車速控制仿真效果如圖5所示,對應的加速度控制仿真效果如圖6所示。
從圖4和圖5中可以看出:本文方法在車速跟蹤誤差較小和車速跟蹤誤差較大的情況下,都幾乎沒有超調現象,穩態誤差小于0.2 km/h。從圖6中可以看出:在車速跟蹤誤差大于設置的閾值時,縱向控制的階躍響應性能較好能,能夠滿足期望加速度的需求。
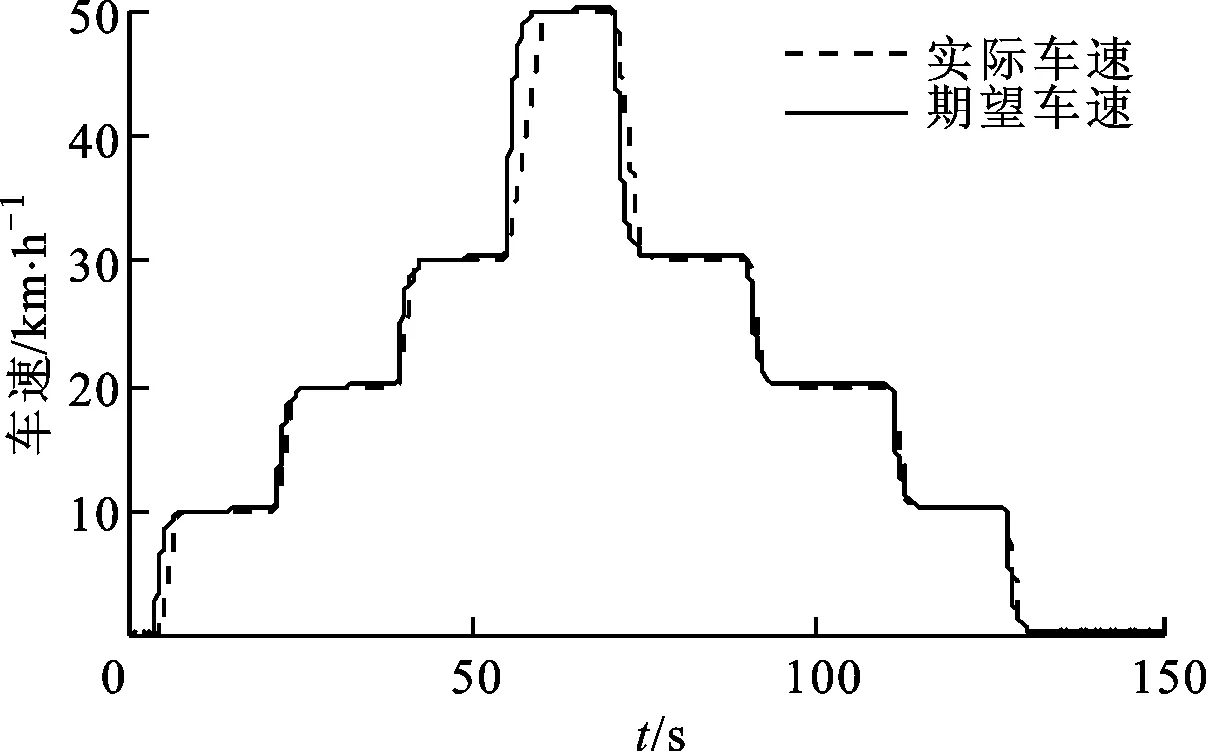
圖4 縱向車速控制階躍響應
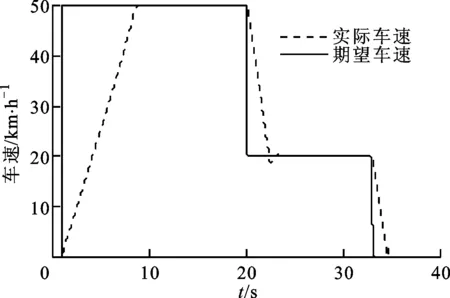
圖5 考慮加速度的縱向控制階躍響應
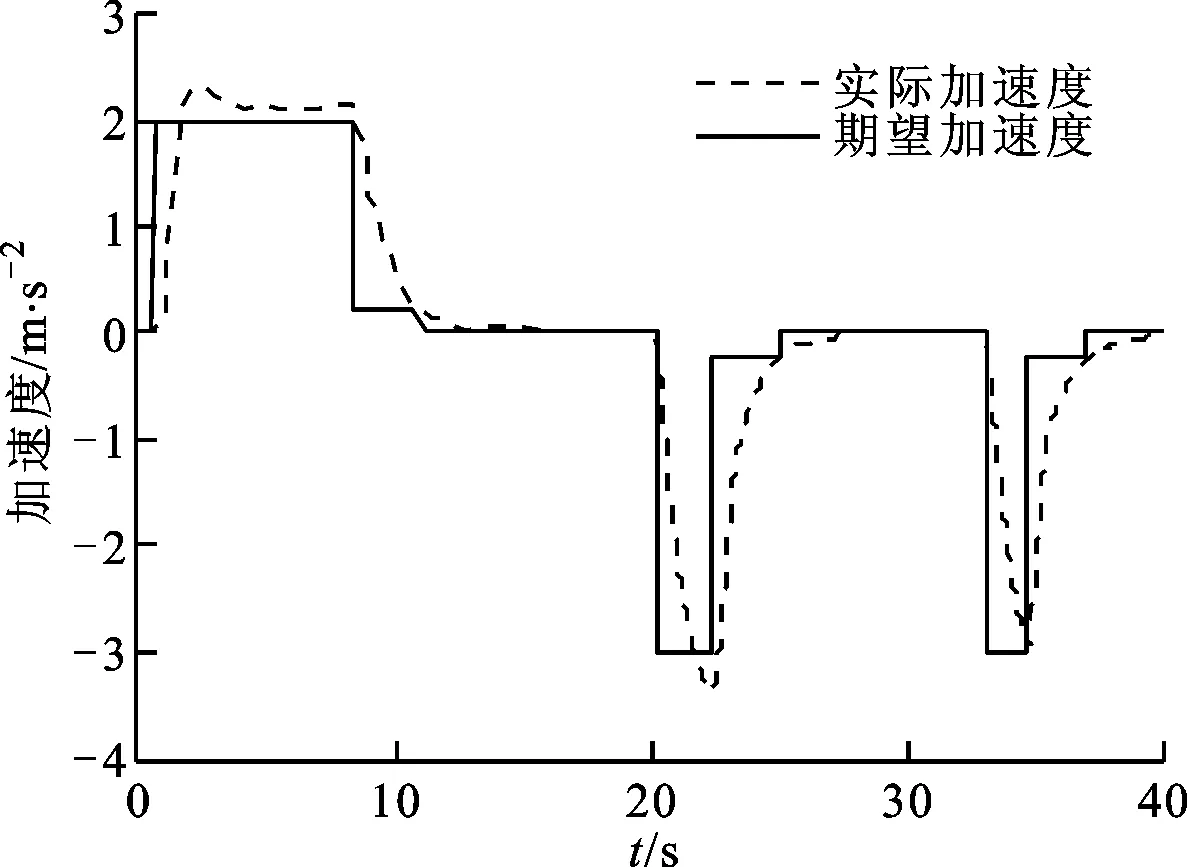
圖6 加速度跟蹤效果
工況二:8°坡度路面,路面附著系數為0.85。試驗是期望車速從0到10 km/h,目的是為驗證縱向控制方法在坡度路面上的跟蹤效果。在坡度路面上的車速控制效果如圖7所示。
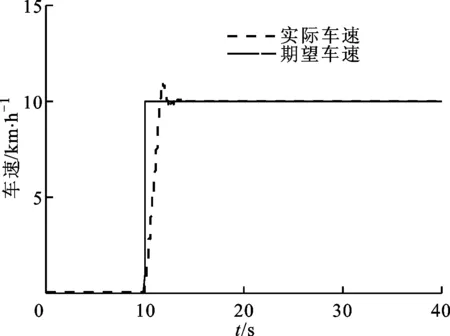
圖7 坡度路面上縱向控制跟蹤效果
從圖7可以看出,在坡度路面上,實際車速迅速達到期望車速,穩態誤差小于0.2 km/h,但相對超調量為0.5%。本文算法在坡度路面上的跟蹤效果得到了驗證。
綜合上述2種工況下的跟蹤效果可知,本文提出的考慮加速度需求的自適應車速控制方法在水平路面和坡度路面都能有較好的跟蹤效果。
4 實車試驗
在仿真試驗的基礎之上,進行實車試驗來驗證本文方法的跟蹤效果,試驗平臺如圖8所示,該平臺經過改造后驅動電機可以實現線控。縱向車速由車輛底盤輪速信號轉換得到,加速度通過慣導設備RT3003獲取,嵌入式控制器用于數據采集和實時控制,如圖9所示。試驗場地為圖10中的圓形試車場,該試車場包括坡度路面。

圖8 試驗平臺 圖9 試驗車內部圖
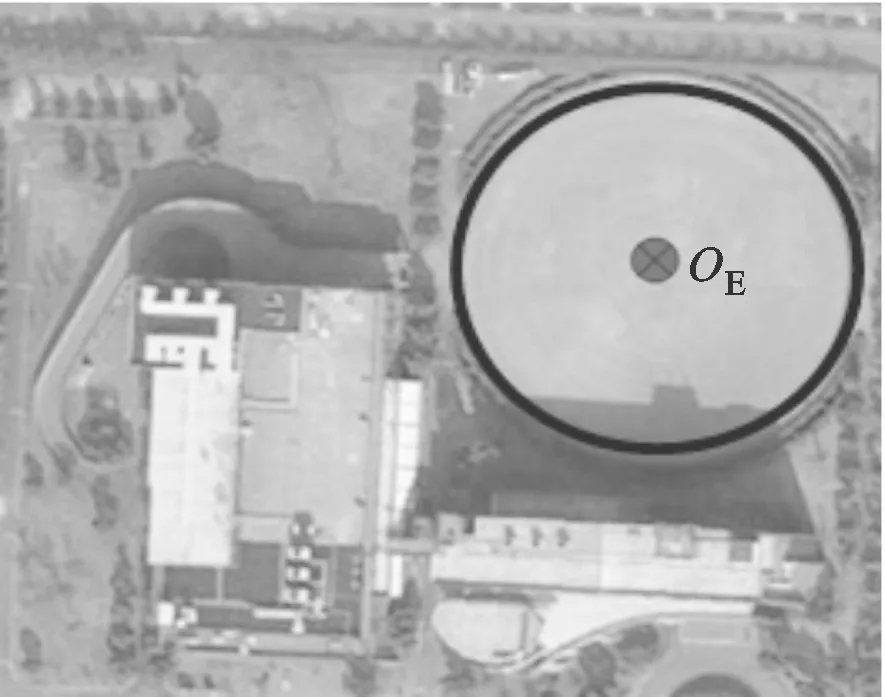
圖10 試驗場地
為了驗證本文方法對期望車速的跟蹤能力,在水平路面設計階躍響應試驗工況,在坡道上設計上坡起步和下坡車速跟蹤試驗工況,分別與未加入道路阻力估計器的方法進行對比分析。
圖11是本文方法在水平路面0~50 km/h的階躍期望車速的跟蹤效果,可以看出:在跟蹤穩態車速時,誤差不到0.2 km/h,與圖4中的仿真效果幾乎相同,能夠快速準確地響應到期望車速;當期望車速從30 km/h增加到50 km/h時,實車試驗的車速有些超調和抖動,但相對超調量低于0.5%,在可以接受的范圍之內。由此,縱向控制器的穩態跟蹤能力得到了驗證。此外,由于水平路面上道路阻力相對較小,未加道路阻力估計器的跟蹤效果和自適應控制跟蹤效果差別不大。

圖11 本文方法的階躍響應
在坡度路面上坡的車速跟蹤效果如圖12所示,下坡跟蹤效果如圖13所示,可以看出:未加估計道路阻力的方法在坡道上起步時有超過2 s的溜坡現象,且無論上坡還是下坡,車速均有明顯的超調;本文方法在坡道上起步時只有不到1 s的溜坡現象,且車速無明顯超調,基本上可以忽略坡度對車速控制的影響,和圖7的仿真效果基本相同。由于實車試驗時對階躍的期望車速加了濾波,所以實車試驗的車速幾乎沒有超調,跟蹤效果更好,而仿真中出現不超過1%的相對超調量,可以接受。顯然,本文方法控制效果更好,能在一定程度上抑制路面坡度對車速控制的影響。
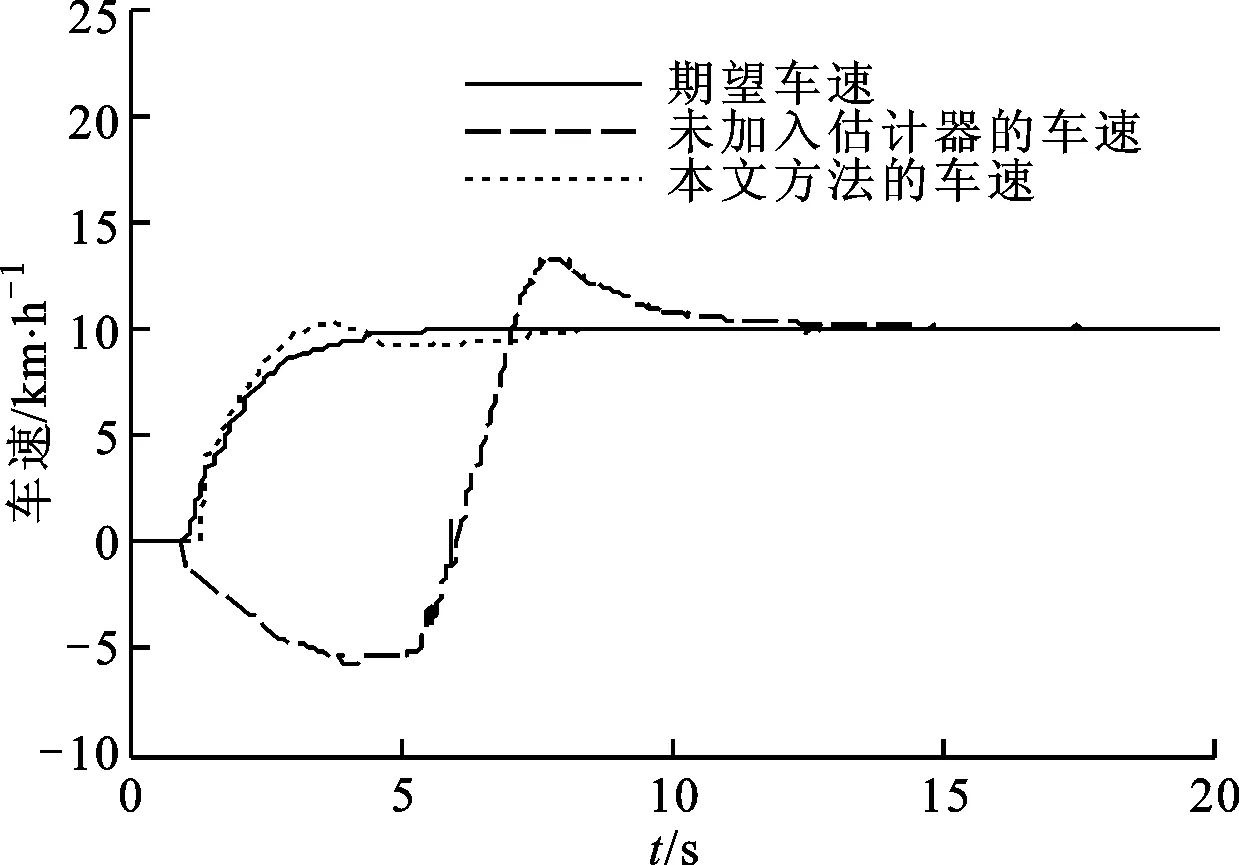
圖12 上坡車速跟蹤效果對比
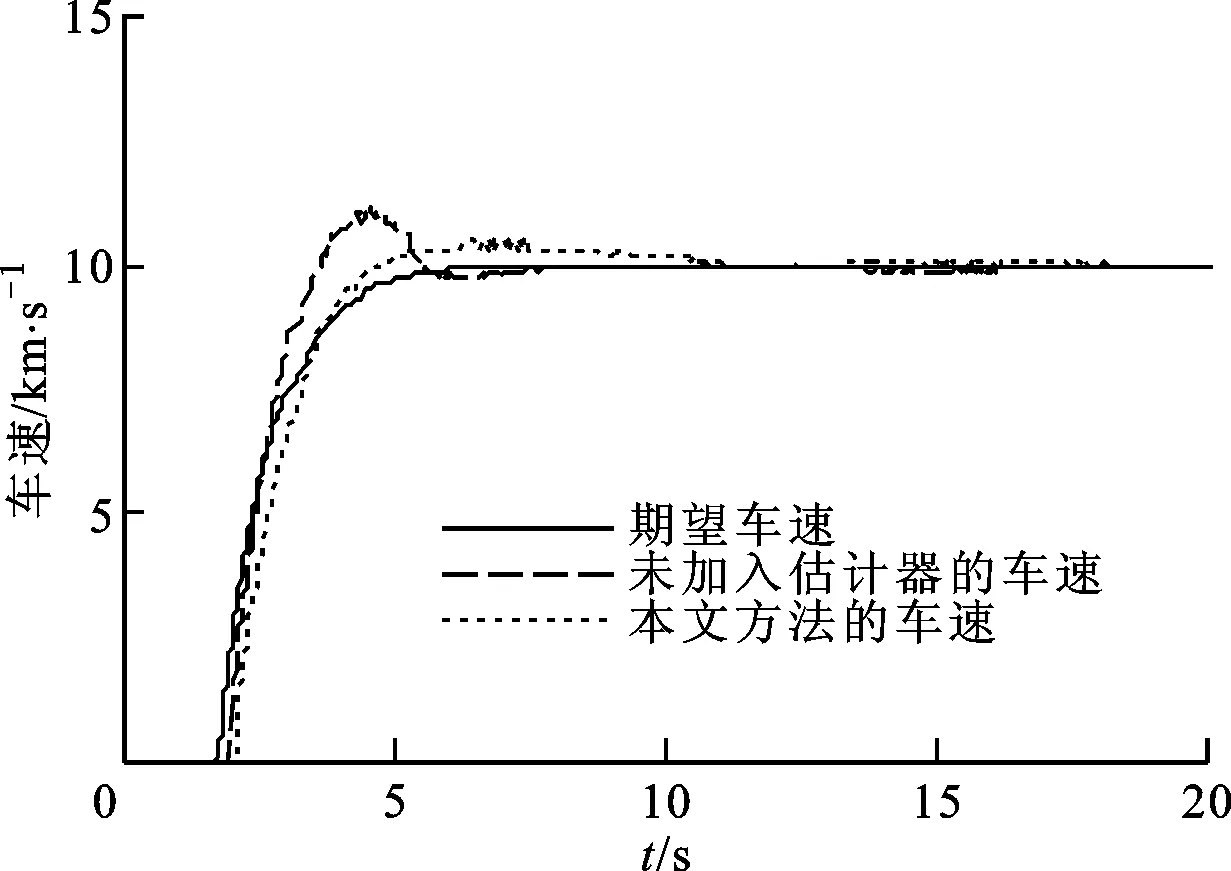
圖13 下坡車速跟蹤效果對比
為了驗證本文方法在跟蹤期望車速過程中跟蹤期望加速度的能力,在水平路面上設計了不同的期望加速度跟蹤試驗。
加速度控制試驗一:水平路面,路面附著系數0.8,50 km/h的階躍期望車速響應,加速度為1 m/s2,減速度為-1 m/s2。將本文方法與傳統的PI控制方法進行對比。由于傳統的PI控制方法無法同時跟蹤期望車速和期望加速度,因此分別進行車速跟蹤和加速度跟蹤試驗。
圖14和圖15是期望加速度較小時,控制方法的試驗效果對比,可以看出:本文方法相比傳統的PI控制方法能夠在較大車速誤差下超調較小,并且能夠在跟蹤加速度時滿足車速的需求。本文方法在一開始就進入到加速度跟蹤控制模式中,實際加速度能快速穩定地跟蹤上期望的加速度,穩態誤差在±0.1 m/s2;在過渡控制模式中,實際加速度的絕對值逐漸從初始值減小至0.2 m/s2,實際車速平穩地跟蹤上期望車速且毫無超調。傳統的PI控制方法超調相對較大,整體響應較慢,無法在跟蹤加速度時滿足車速的需求。在大車速跟蹤誤差下,本文方法的跟蹤效果得到了驗證。

圖14 縱向車速控制跟蹤效果對比及相應的標志位
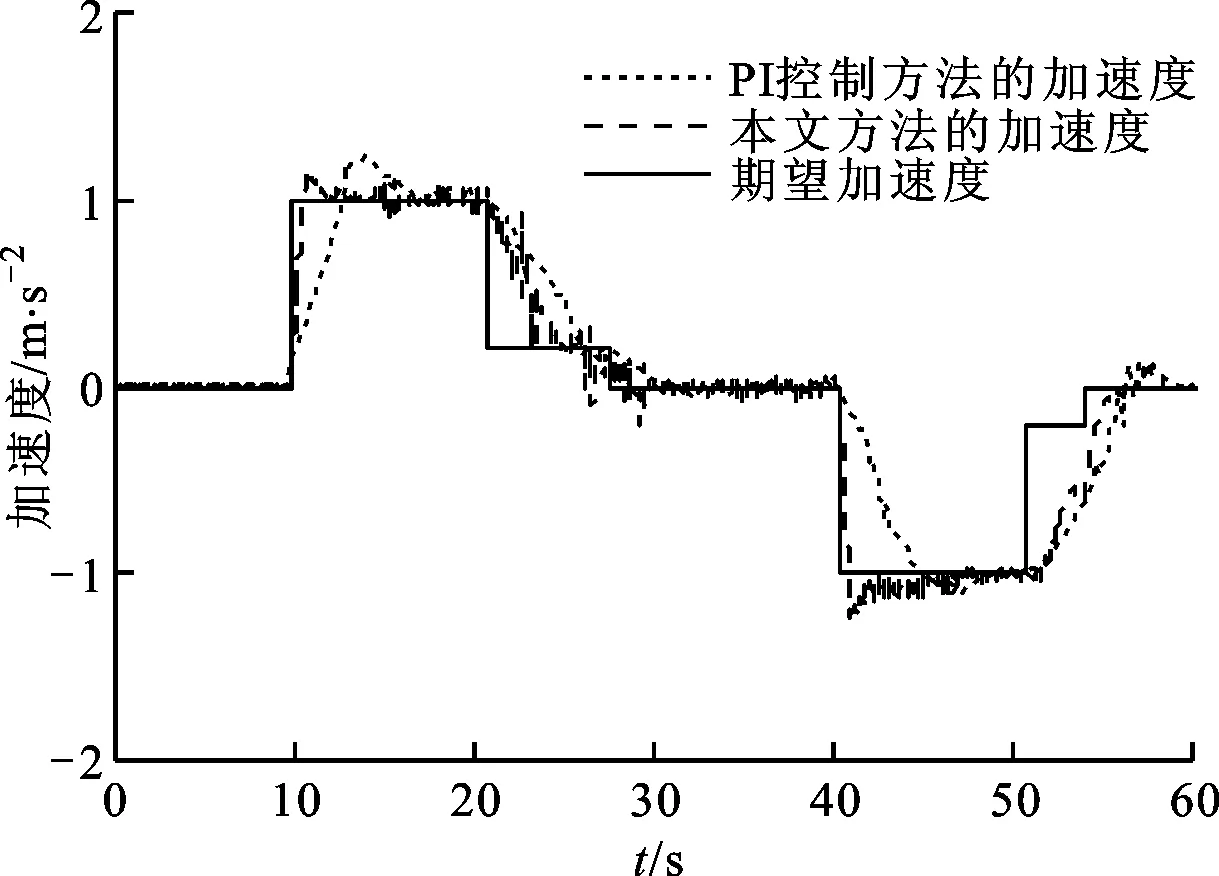
圖15 縱向加速度控制跟蹤效果對比
加速度控制試驗二:水平路面,路面附著系數0.85,期望車速從0到50 km/h再到20 km/h再到0的階躍期望車速響應,加速度為2 m/s2,減速度為-3 m/s2。
圖16和圖17是期望加速度較大時,控制算法的實車試驗效果對比。與仿真試驗效果圖5和圖6相比,二者基本相同,但實車試驗減速控制中出現的超調較大。加速度跟蹤過程中,仿真效果比實車試驗效果好,仿真效果的穩態誤差為±0.15 m/s2,實車試驗的穩態誤差為±0.1 m/s2。同時可以看出:傳統的PI控制方法在車速跟蹤時無法同時滿足期望加速度的需求,在減速過程中,本文方法響應較快,并且超調較小;當期望車速為50 km/h時,階躍變化后,本文方法的實際加速度能快速準確地跟蹤期望加速度2 m/s2,穩態誤差不超過0.1 m/s2,同時在加速度過渡模式逐漸收斂到0.2 m/s2,使加速度跟蹤控制模式能夠平滑地過渡到車速控制模式;當期望車速從50 km/h突然降到20 km/h時,本文方法的實際減速度也能快速準確地跟蹤期望減速度-3 m/s2,誤差不超過0.1 m/s2,同時在加速度過渡模式快速收斂到-0.2 m/s2,能夠在較大的速度時緊急制動到給定車速,對于緊急避障有重大意義,而傳統的PI控制方法在減速度跟蹤過程中響應較慢,無法用相同的參數來滿足各種工況,并且無法證明閉環系統的穩定性。綜上,本文提出的考慮加速度需求的車速控制算法能夠滿足智能車運動控制的需求,并且跟蹤效果較好。

圖16 縱向車速控制跟蹤效果及相應的標志位

圖17 縱向加速度控制跟蹤效果對比
5 結 論
本文提出了一種考慮上層加速度需求的車速自適應控制方法。首先,針對智能車行駛中道路阻力的不確定性,基于FFRLS算法設計了道路阻力估計器,通過仿真及實車試驗,驗證了車速自適應控制方法在坡道上的跟蹤效果優于未加入估計器時的效果。之后,考慮上層的期望加速度需求,基于條件積分算法設計了耦合的車速和加速度控制律,通過積分自動調節和切換策略,保證了同時跟蹤期望車速和期望加速度,通過仿真及實車試驗驗證了本文方法的有效性。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
兒童故事畫報(2019年5期)2019-05-26 14:26:14
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
Coco薇(2016年8期)2016-10-09 02:11:50
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國醫藥科學(2015年19期)2015-02-27 12:33:11
