航天測量船系泊狀態下慣導水平零值測量方法*
2018-12-21 02:55:16鐘德安馮鴻奎
彈箭與制導學報 2018年2期
關鍵詞:測量
包 飛,鐘德安,向 頡,馮鴻奎,康 凱
(中國衛星海上測控部,江蘇江陰 214431)
0 引言
航天測量船慣導設備在塢內標校中通過水平取齊[1]獲取水平姿態零值,但由于其本身設備的特性,在出塢后的使用過程中會發生零值漂移,零值漂移量在習慣上被稱為漂移零值或者新零值,在數學上表示為動態測量殘差均值。為提高測量船上雷達設備的綜合外測精度,應及時修正慣導新零值。文中研究的零值測量方法中的零值指的就是取齊后產生的新零值。
在航天測量船系泊或航行等動態條件下,對航天測量船慣導設備水平零值的測量主要采用慣導設備間的相互比對法和經緯儀測星解算法[2]。慣導設備間的相互比對法屬同等精度間的互比,只能定性分析問題。經緯儀測星解算法受經緯儀本身測星精度和軸系誤差標定精度等因素影響,測量精度與慣導零值相近[3],達不到三分之一精度的鑒定要求。而電子水平儀靜態測量精度優于1″,且本身零值修正方便,若電子水平儀的動態測量精度能優于3″,則可使用電子水平儀標定慣導的水平零位,從而及時修正慣導水平零值。
該方法的研究思路主要分為三步:
第一步:改造電子水平儀,增加動態測量功能,同時為便于與慣導數據比較還需增加外部時間同步功能。
第二步:構建電子水平儀動態誤差檢測系統,包括組成硬件、檢測方法以及數據處理方法。
第三步:通過實驗數據分析電子水平儀動態測量誤差分布規律,研究慣導設備水平零值的測量方法。
1 電子水平儀改造
通常電子水平儀系統由1臺計算機、1臺主機和相應的傳感器組成。為實現電子水平儀動態測量功能以及外部時間同步功能,研制了一臺電子水平儀同步數據采集儀取代原來的主機。
電子水平儀同步數據采集儀在電路設計上采用時間同步模塊、模數轉化模塊、控制模塊和電源模塊架構。電路組成框圖如圖1所示。
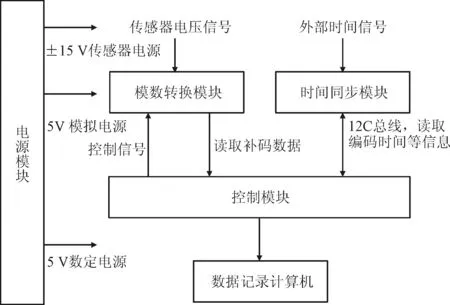
圖1 電子水平儀同步數據采集儀電路框圖
1)時間同步模塊
時間同步模塊負責解碼外部B(DC)碼信號,產生同步的本地時間信號與頻率信號,主要采用LV4256和LPC932A1芯片完成相關功能。
2)模數轉化模塊
模數轉化模塊負責將EDA2000°水平儀傳感器輸出的電壓信號轉化為數字補碼數據,主要采用AD7606- 4芯片完成相關功能[4-5]。
為預防干擾,該模塊印制電路板的模擬部分與數字部分進行了分離設計,模擬部分與數字部分分割地層,模擬地和數字地通過0歐姆電阻單點連接。AD7606- 4芯片的REFIN/REFOUT、REFCAPA、REFCAPB、REGCAP引腳以及ADR421的Vin引腳采用低ESR的陶瓷電容進行去耦[6],從而降低AD7606的電源阻抗及其電源尖峰幅度,提高采樣的準確性。
3)控制模塊
控制模塊負責按照一定的頻率控制模數轉化電路工作、讀取時間同步電路的本地時間信息以及向外部接口發送處理好的傳感器測量值、測量時間、工作狀態等信息。控制模塊主要采用LPC932A1芯片完成相關功能。
4)電源模塊
電源模塊負責提供2路15 V的傳感器工作電壓、1路5 V的數字電路工作電壓以及1路5 V的模擬電路工作電壓。
設備研制完成后進行了相關功能與靜態指標測試。經過48 h測試,設備各功能正常,同步精度優于30 μs,30 min靜態水平姿態測量穩定度約為0.5″。
2 電子水平儀動態測量誤差檢測
為研究電子水平儀系統在系泊狀態下的測量誤差,研究建立了一套檢測系統,并進行了相關實驗。
2.1 檢測系統組成設計
檢測系統組成如圖2所示。

圖2 檢測系統設備組成圖
該系統主要包括1臺搖擺臺(含控制計算機),1臺激光陀螺慣導,2臺水平儀傳感器,1臺電子水平儀同步數據采集儀,1臺數據記錄計算機(含記錄軟件與數據處理軟件),1臺時碼產生器(含GPS天線)。其中,搖擺臺可三維搖擺,搖擺規律可任意設定,搖擺精度優于2″。激光陀螺慣導校準后,水平測量精度優于1″。
2.2 檢測方法設計
由于電子水平儀靜態測量精度很高,優于1″,所以采用以電子水平儀靜態測量值為真值,檢測其動態測量誤差的方法。
2.2.1 搖擺臺輸入數據設計
為充分研究動態測量誤差的分布規律,設計了3類振蕩環境模擬數據,分別是正弦波振蕩數據、系泊條件下振蕩模擬數據和海上條件下振蕩模擬數據。每組數據分為連續數據和斷續數據兩部分,其中斷續數據是對連續數據的斷續化,每10 s設計20個斷點,每個斷點停留5 s,被斷續的數據源時間長度約3 min。
2.2.2 檢測步驟
步驟1:將電子水平儀傳感器放置于一個高精度三維搖擺臺上,并使電子水平儀傳感器的敏感軸與捷聯慣導的橫搖敏感軸盡量平行。
步驟2:在三維搖擺臺靜止狀態下,開啟捷聯慣導。
步驟3:啟動搖擺臺,使搖擺臺根據設計好的搖擺輸入數據進行搖擺,記錄電子水平儀同步數據采集儀輸出值αi(i=1,2,3,…,n,為數據點數)和捷聯慣導的輸出值橫搖角φj、縱搖角ψj(j=1,2,3,…,n,為數據點數)。
2.2.3 數據處理方法

(1)


步驟3:依據步驟2中捷聯慣導輸出值φj、ψj,從相對應的連續實驗記錄的電子水平儀數據中挑選出相同捷聯慣導輸出值和運動方向的測量數據ak。
(2)
(3)

2.3 檢測結果
經過相關實驗,檢測結果如表1所示。

表1 新水平儀動態測量殘差統計結果
3 電子水平儀動態測量誤差分布規律研究
3.1 正弦波模擬輸入條件下誤差分布規律研究
理論上,電子水平儀動態測量誤差主要受加速度影響,動態測量誤差變化規律應和加速度保持一致,加速度變大時,動態測量誤差變大,加速度方向取反時,動態測量誤差值取反。設加速度影響函數為f(αk),則各點測量值可表示為:
(4)
將式(4)代入到式(2)中,可得新的殘差均值公式:
(5)
由于在一個正弦振蕩周期內,各采樣點的加速度值一般呈正負對稱分布,一個周期內f(αk)之和理論上應為0,因此,通過式(5)計算所得的殘差均值應為0″。
對4組正弦模擬實驗所得的數據進行分析,除超過保精度量程的“±60′正弦”實驗外,其它實驗所得到的殘差均值均優于1″,考慮到其他一些精度影響,實測結果與式(5)計算的理論結果是一致的。此外,四組殘差曲線的變化規律均與加速度變化一致,如圖3為“±10′正弦”實驗的輸入波形,圖4為“±10′正弦”實驗所得的殘差曲線,圖4中殘差曲線變化規律與振蕩過程中的加速度的變化是一致的。
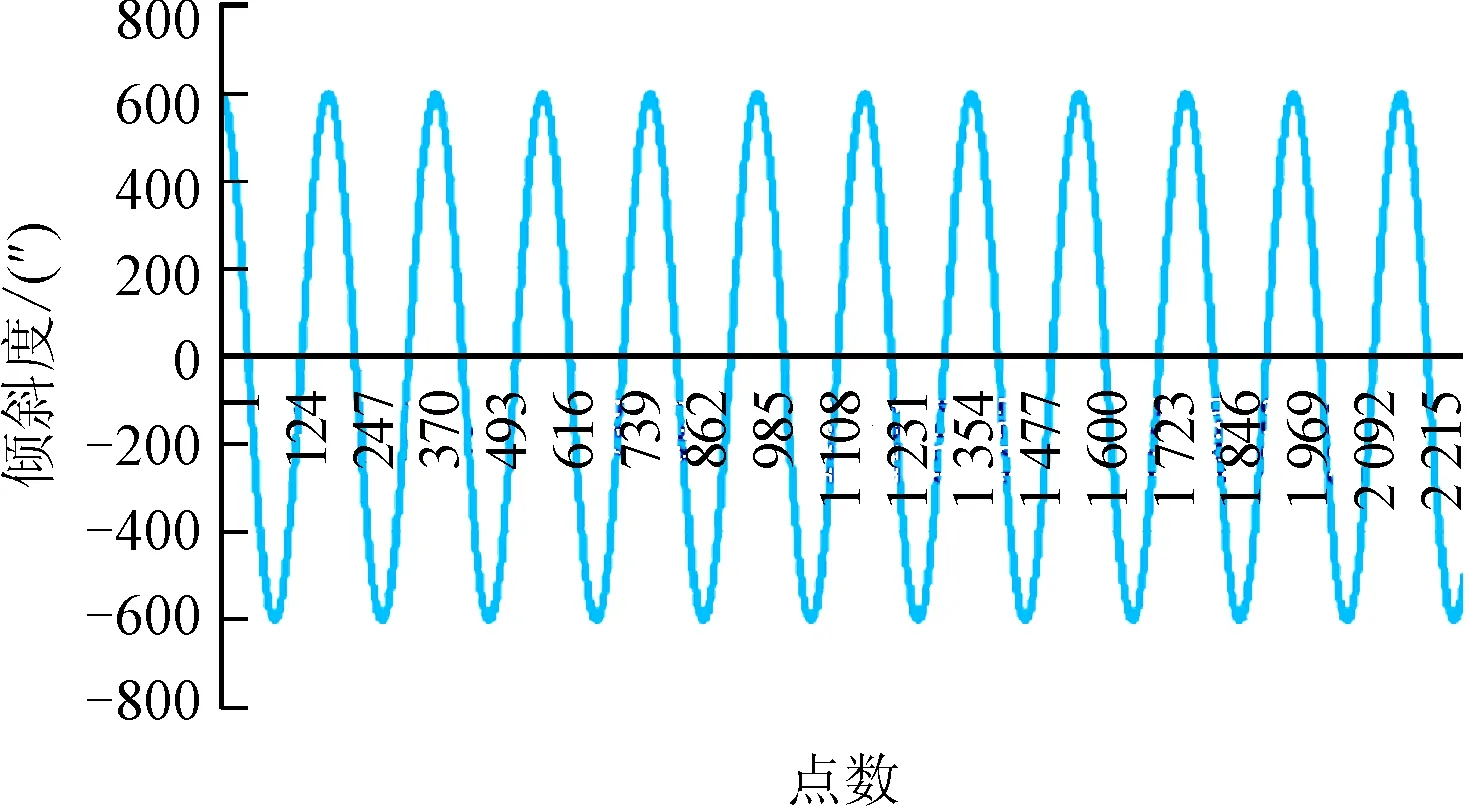
圖3 “±10′正弦”實驗輸入波形

圖4 “±10′正弦”實驗所得的殘差曲線
根據以上實驗結果,可以得到以下結論:新電子水平儀動態測量誤差動主要受加速度影響,其它誤差影響較小。
3.2 系泊狀態下誤差分布規律研究
系泊條件下的動態測量誤差檢測共進行了2組實驗,實驗所得的殘差均值分別為-0.003 36″和1.107 124″。如圖5為“XX5船系泊狀態”實驗輸入波形,圖6為“XX5船系泊狀態”所得殘差曲線。結合3.1的實驗結論,可以推出以下結論:在滿足一定數據量的情況下,系泊條件下各采樣點的加速度之和存在歸零的特性或者說動態誤差殘差均值存在歸零的特性。

圖5 “XX5船系泊狀態”實驗輸入波形(橫搖)
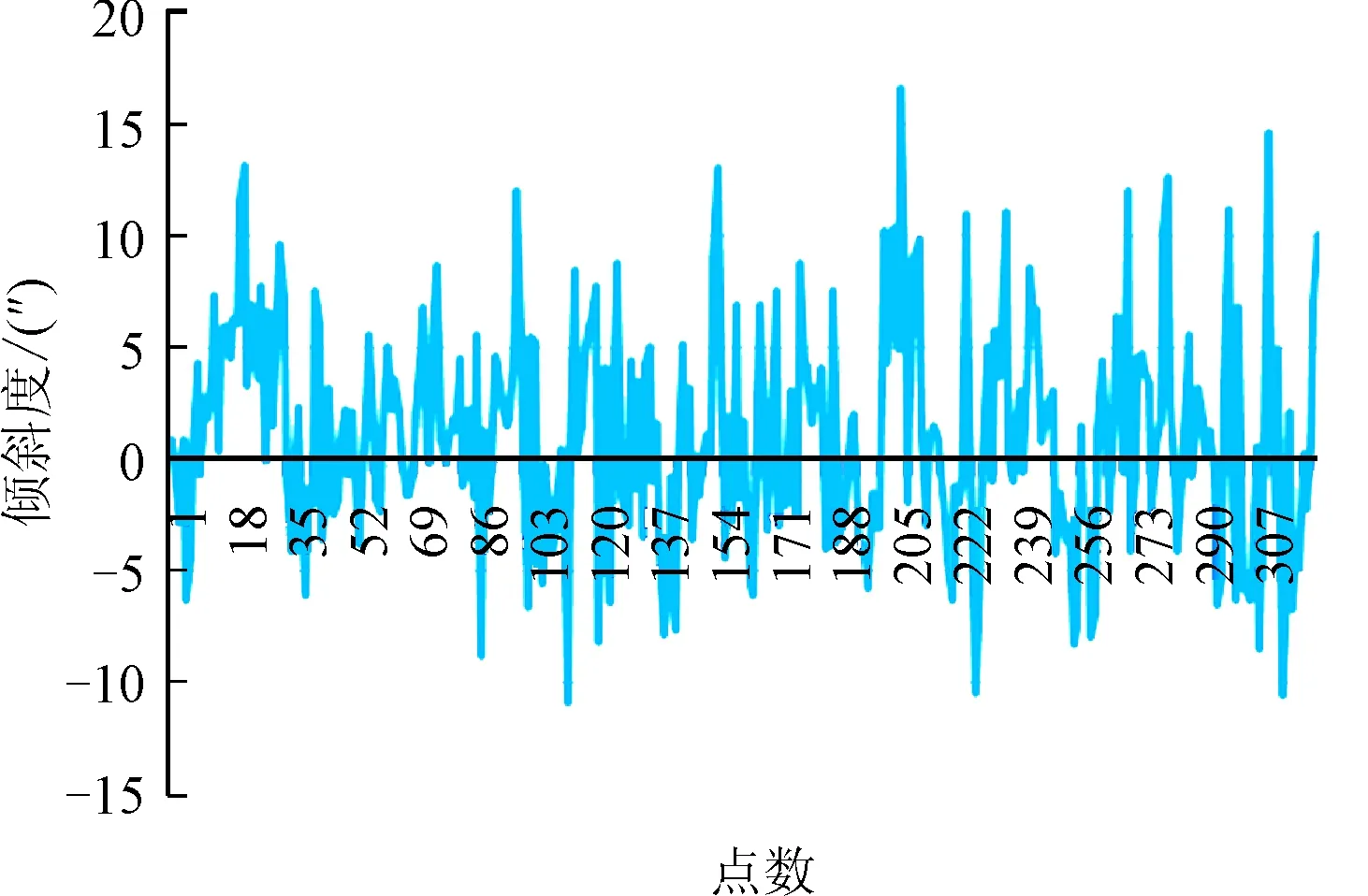
圖6 “XX5船系泊狀態”實驗所得殘差曲線(橫搖)
4 系泊狀態下慣導水平零值測量方法研究
1)設放置在電子水平儀專用測量平臺上的電子水平某方向水平測量值為αi,同時刻慣導同方向水平測量值為φi,慣導平臺和電子水平儀專用測量平臺在同方向上水平差為ωz,新電子水平儀零值為αz,慣導取齊時該方向上水平零值為φz,慣導動態測量誤差di。
2)按照式(6)計算殘差均值,i為某時刻采樣點編號,αi和φi通過時間標志對齊;
(6)
3)將式(4)和相關零值參數代入式(6),可得:
(7)

4)將差值ωz代入式(7),可得:
(8)
由3.2實驗結論可知在系泊低動態條件下滿足一定數據量時可認為加速度之和存在歸零的特性,因此式(8)可化簡為:
(9)
5 結束語
通過前期的相關研究,推導出了新電子水平儀在系泊低動態條件下慣導水平零值計算公式。文中的研究成果主要用于航天測量船在本船碼頭實施的慣導零值標定工作,由于水紋等條件不同,其它測量環境下,該方法是否適用,還需具體研究。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
