通用六軸工業機器人創建與離線編程
2018-12-17 01:05:06朱國云
新教育時代電子雜志(學生版) 2018年19期
朱國云
(深圳第二高級技工學校 廣東深圳 518000)
引言
隨著機器人應用領域越來越廣,傳統的示教編程這種編程手段有些場合變得效率非常低下,最大的缺點是需要占用機器人工作時間,因此離線編程應運而生,并且應用越來越普及。離線編程是通過軟件,在電腦里重建整個工作場景的三維虛擬環境,然后軟件可以根據要工加零件的大小、形狀、材料,同時配合軟件操作者的一些操作,自動生成機器人的運動軌跡,即控制指令,然后在軟件中仿真與調整軌跡,最后生成機器人程序傳輸給機器人。離線編程的使用減少機器人停機的時間,使編程者遠離危險的工作環境,改善了編程環境; 第三方通用離線編程軟件可以對各種機器人進行編程,如RobotArt、RobotMaster、RobotWorks、EASY-ROB都可以支持多種品牌工業機器人離線編程操作,EASY-ROB軟件還提供了用戶創建1-12軸機器人平臺,本文是基于該平臺從運動學正解和逆解兩方面詳細示范介紹了六軸通用工業機器人的搭建方法,并可利用自己拱建的機器人去創建應用工作單元。
一、機器人模型概述
1.機器人運動學模型
根據實際需要設定機器人的自由度,提前規劃好機器人六個軸的關節運動范圍、關節運動旋轉方向、關節運動速度、加速度數等參數;規劃好機器人基座中心點到第一軸的位置偏移,第一軸到第二軸的位置偏移,依此類推直到第六軸到TCP的位置偏移。
2.機器人CAD模型
利用3維建模工具依據機器人運動學模型繪制創建機器人底座及各軸連桿的三維CAD模型,為后續粘連到機器人各軸做好準備。
二、機器人CAD模型
1.設置機器人關節數及旋轉方式
EASY-ROB提供了多種機器人創建模型,通常我們會選擇創建通用型機器人,可以選擇1-12軸機器人創建,根據需要設定機器人的軸數(6軸)和各關節的旋轉方向。
2.設置機器人各軸中心點的坐標位置
(1)機器人第1軸中心點相對底座中心點的位置偏移:X=0,Y=0,Z=174,RX=0,RY=0,RZ=0;
(2)機器人第2軸中心點相對第1軸中心點的位置偏移:X=160,Y=0,Z=256,RX=0,RY=0,RZ=0;
(3)機器人第3軸中心點相對第2軸中心點的位置偏移:X=0,Y=0,Z=580,RX=0,RY=0,RZ=0;
(4)機器人第4軸中心點相對第3軸中心點的位置偏移:X=140,Y=0,Z=125,RX=0,RY=0,RZ=0;
(5)機器人第5軸中心點相對第4軸中心點的位置偏移:X=510,Y=0,Z=0,RX=0,RY=0,RZ=0;
(6)機器人第6軸中心點相對第5軸中心點的位置偏移:X=0,Y=0,Z=0,RX=0,RY=0,RZ=0;
(7)機器人第法蘭盤中心點相對第6軸中心點的位置偏移:X=100,Y=0,Z=0,RX=0,RY=90,RZ=0;
3.創建機器人BODY,并粘連到對應軸
機器人運動學模型建立好后,接下就要創建機器人CAD模型了,EASY-ROB軟件提供了簡單的幾何體創建方法,如立體體(CUBE)、金字塔(PYRAMID)、楔形物(WEDGE)等;同時支持STL文件、IGP文件、3DS文件導入,文件導入時注意調整縮放比例;最后把創建或導入的BODY文件粘連到對應的軸上,機器人就有血和肉了。
4.設置機器人屬性
通過機器人運動學對話框,可以設置以下參數,如機器人名稱,機器人工具,機器人原點位置,原點位置最多支持設置12個,各關節軸的運動范圍等,所有的這些設置也最終決定了機器人的運動半徑和運動范圍,和實體機器人是完全對應的。
5.運動學逆變換
前面我們所做的都是運動學正變換,也叫運動學正解,即給定機器人各關節變量,計算機器人末端的位置姿態;若要通過機器人末端的位置姿態來計算機器人對應位置的全部關節變量,就需要對機器人進行逆變換,也是通常講的運動學逆解,只有經過運動學逆變換后才能對機器人進行編程,TCP自動生成在第六軸的法蘭盤中心點。
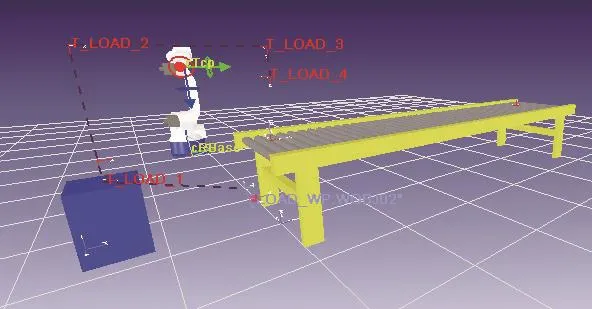
三、機器人簡單工作站的離線編程
機器人搭建好后,我們就可能通過正常加載方法來進行加載,創建工作單元,編程和調試。
1.加載機器人文件
機器人文件可以從庫里調用,也可以根據需要自行創建,創建方法和步驟見上文所述。
2.加載工具文件
工具文件定義了TCP的位置和旋轉角度等信息,加載后會自動將TCP的位置移動到工具的未端中心點位置,如果需要修改可以在工作單元中重新設置TCP的位姿。
3.加載設備文件
EASY-ROB軟件定義1-3軸的機器人文件為設備(DEVICE),4軸及以上的機器人文件才是機器人,單機器人版和多機器人版也是以此來定義的。
4.加載或創建BODY文件
5.根據工作需要調整工作單元中各設備的位置
6.目標點示教和編程
EASY-ROB軟件提供了強大的后置處理功能,可以方便的將EASY-ROB本身的編程語言后置處理為其他機器人品牌的編程語言,可以大大減輕學習壓力。
結束語
機器人離線編程正朝著一個智能化、專用化的方向發展,用戶操作越來越簡單方便,并且能夠快速生成控制程序。在某些具體的應用領域可以實現參數化,極大的簡化了用戶的操作。同時機器人離線編程技術對機器人的推廣應用及其工作效率的提升有著重要的意義,離線編程可以大幅度節約制造時間,實現機器人的實時仿真,為機器人的編程和調試提供靈活的工作環境,離線編程是機器人發展的一個大的方向。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
少先隊活動(2021年4期)2021-07-23 01:46:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
光學精密工程(2016年6期)2016-11-07 09:07:19
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
核科學與工程(2015年4期)2015-09-26 11:59:03
中國艦船研究(2014年5期)2014-05-14 06:43:09