冰芯光學特性二維重構儀開發*
2018-11-28 02:12:46董天驕于海濱安春雷史劍光
傳感器與微系統 2018年12期
關鍵詞:區域
董天驕, 于海濱, 安春雷, 史劍光, 江 曉
(1.杭州電子科技大學 電子信息學院,浙江 杭州 310018;2.中國極地研究中心,上海 200000)
0 引 言
冰芯光學檢測技術在保持冰芯固態下掃描冰芯,對冰芯剖面或冰芯切片的照片進行分析,獲得冰芯的光學性質,如灰度,晶體結構等[1]。
目前,國外已經研制出多套冰芯光學測定儀。日本在2003年就已經研制出了一種冰芯光學測定儀,該冰芯光學測定儀應用于Dome Fuji ice core project Ⅱ[2]。美國國家冰芯實驗室在2007年也研制出了冰芯光學測定儀[3]。該冰芯光學測定儀的掃描分辨率為0.05~1 mm。具有自動光學圖像采集和數據處理的功能。然而,這些設備只能在實驗室使用,無法抵抗極地的惡劣環境,難以在第一時間保存冰芯的原始信息[4]。
國內光學影相技術研究在極地科研領域起步較晚[5]。國內的光學影像儀應用在冰芯檢測領域幾乎沒有成熟產品[6],因此,本文設計并制作了冰芯光學特性二維重構儀。儀器基于機電一體式設計,并引入全景圖像拼接技術,可實現自動光學掃描、冰芯全景圖重建等功能。同時,模塊化設計和智能變頻恒溫控制等關鍵技術的引入,使得本儀器可滿足冰川或極地惡劣環境的現場工作要求。最后,從控制精度、合成效果兩個方面進行實驗分析,說明本儀器能夠穩定可靠地應用于極地科研工作。
1 系統設計
冰川或極地氣候惡劣,運輸不便,因此,本儀器采用分模塊設計,便于運輸和組裝。儀器包括工業相機、電機滑軌、發光臺、工作臺、電機控制器五部分。工業相機用于冰芯拍照,電機滑軌用于控制工業相機,發光臺用于冰芯打光。電機控制器用于控制電機。工作臺用于安裝所有模塊。工業相機和電機控制器裝在智能變頻恒溫箱中,用于保障在低溫環境可靠工作。系統結構如圖1所示,計算機控制相機拍攝冰芯圖片,通過串口向電機驅動模塊發送前進、后退和停止指令。計算機完成二維重構的任務。電機驅動模塊控制步進電機的啟停和方向。智能變頻恒溫箱保護系統的內部電路。發光二極管(light-emitting diode,LED)燈負責給冰芯、標尺打光。電源負責給整個系統供電。儀器結構如圖2所示。

圖1 系統結構
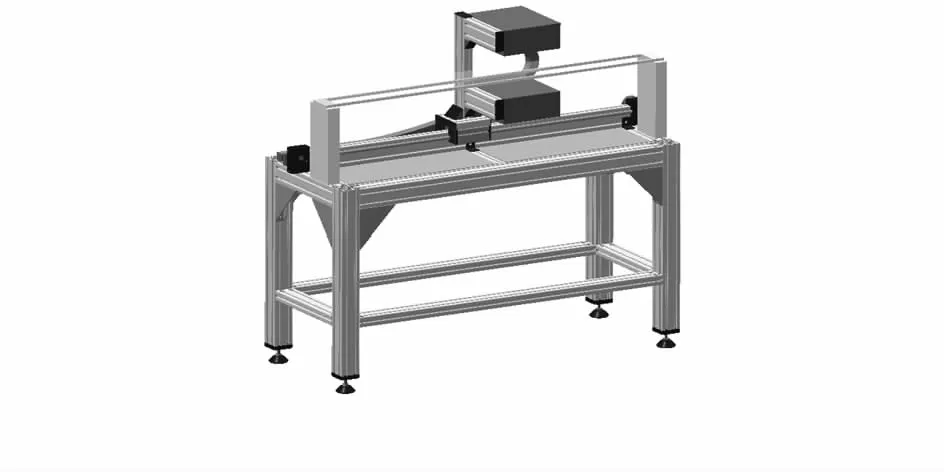
圖2 冰芯掃描機床結構
2 測控系統
測控系統由自動光學掃描、圖像拼接兩部分組成。自動光學掃描是采用步進電機和步進電機控制器組成的一體化控制系統。自動光學掃描需要設定電機的運動方向和運動距離,從而滿足前后兩張圖像的重疊率;控制工業相機拍照,將照片保存到本地;掃描結束后自動返回初始位置。
執行圖像拼接的操作,將拍攝的多張圖片合成一張完整的全景圖。系統流程如圖3所示。

圖3 系統流程
3 圖像拼接
實際工作中,冰芯樣品長度1 m左右,獲得一幅場景的全景圖像很難。如果擴大圖像采集設備的視角,會導致圖像有很大的畸變,同時分辨率沒有提高。為了解決這個問題,本文采用基于特征點匹配的圖像拼接算法。具體拼接流程如圖4所示。
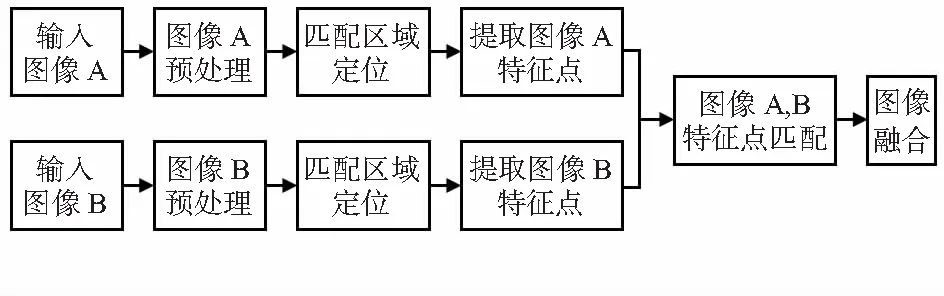
圖4 基于特征點的圖像拼接流程
3.1 圖像預處理
拍攝的冰芯照片一般偏亮,因此,冰芯的原始圖片灰度主要集中在比較亮的區間。采用直方圖均衡化的方法將圖像進行非線性拉伸,重新分配圖像像素值,使一定灰度范圍內的像素數量大致相同,以增強局部的對比度而不影響整體的對比度,使圖像更加清晰。
3.2 圖像匹配區域定位
為了減少圖像拼接的運算時間,需要確定兩幅圖像中配準的區域。因為本儀器是水平掃描,所以在圖像配準時,只需在相似區域內進行特征點的提取和配準,從而縮短了圖像拼接的時間。
圖像匹配的時前后圖像的重疊率在30 %左右效果較好,考慮到步進電機在運動中存在丟包的現象,行進距離不是非常精確。因此,本文選擇前后圖片40 %的區域作為圖像匹配區域,如圖5所示。
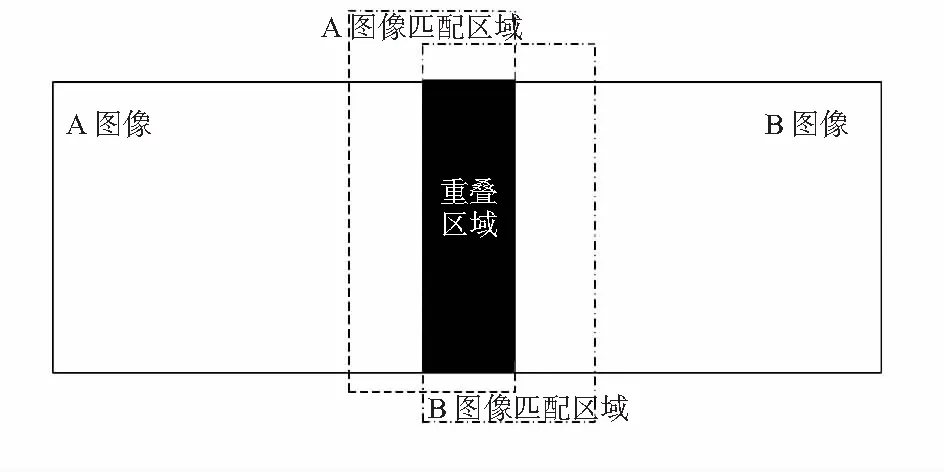
圖5 圖像匹配區域定位
3.3 圖像特征提取
確定圖像匹配區域后,就要在匹配區域內進行特征提取和匹配。因為本文中采集的圖像只存在平移變換,為了加快檢測速度,采用FAST特征提取。FAST角點的定義為:若某像素與其周圍鄰域內足夠多的像素點相差較大,則該像素可能是角點
(1)
式中I(x)為圓周上任意一點的灰度,I(p)為圓心的灰度,εd為灰度差的閾值,N為滿足不等式的個數。如果N大于給定閾值,一般為周圍圓圈點的3/4,則認為該像素是1個特征點。
3.4 圖像特征匹配
為了提高圖像匹配精度,采用RANSAC算法對變換矩陣進行求解與精煉。
3.5 圖像融合
圖像匹配后,圖像間的變換關系唯一確定。但由于拍攝時光照、環境條件的差異,兩幅待拼接圖像的重疊區域可能會有較大的差異。如果直接對圖像進行疊加拼接,則在拼接位置上會存在明顯的拼接縫以及重疊區域的模糊和失真的現象。
本文采用加權平均的融合方法進行圖像平滑過渡。假設f1,f2是兩幅待拼接的圖像,f是融合后的圖像,則
(2)
式中d1,d2為權重值。在重疊區域中,d1由1漸變到0,d2由0漸變到1,由此實現了在重疊區域無縫拼接。
4 實驗與結果分析
實驗計算機采用Windows 7 64位系統、Intel i3處理器、8GB內存;網絡工業相機分辨率為1 920像素×1 080像素。系統采用Microsoft Visual Studio 2013的開發環境,C#編寫PC端軟件,冰芯采用純凈水凍結而成的冰磚樣品。
1)步進電機控制精度分析
控制方式為開環工作,選用6,12,16 cm,3個設定距離來分析運行精度,每個重復3次,得到結果如表1所示。
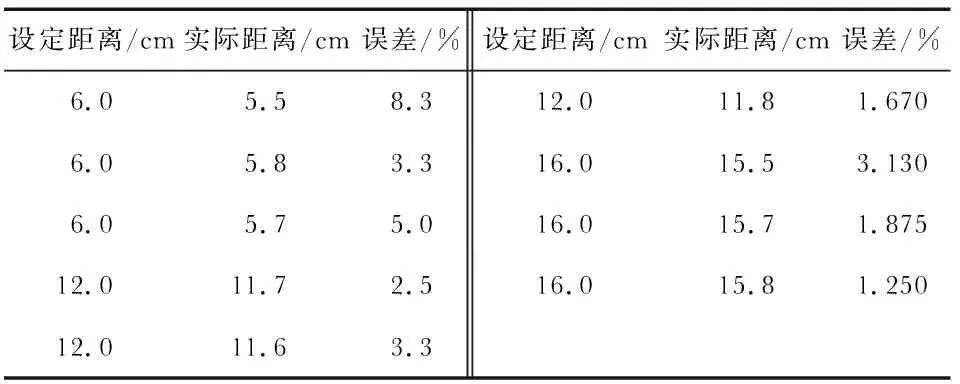
表1 步進電機運行距離的誤差
從結果上可以看出,由于步進電機存在丟幀的現象,步進電機的實際運行距離都會比設定距離小一點。但運行誤差不超過10 %,不會對前后兩張圖片的重疊區域產生太大影響。因此,誤差可以接受。
2)冰芯圖像拼接分析
本文在4種亮度環境中對冰芯進行圖像拼接,拼接后的冰芯全景如圖6所示,可以看出,拼接后的圖片完整的保存了整條冰芯,整幅圖細節清晰,過渡自然,達到設計要求。
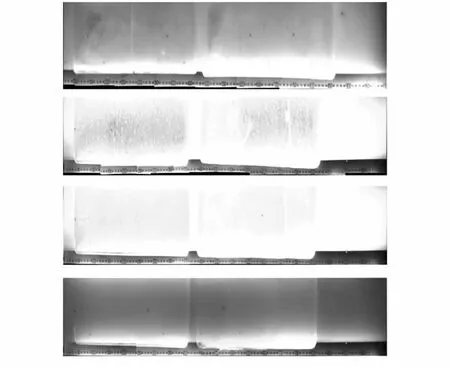
圖6 冰芯全景
5 結 論
設計的冰芯光學特性二維重構儀實現了光學掃描、重建冰芯全景等功能。本儀器全程自動控制,有效減輕了科研人員的負擔;重建后冰芯全景圖分辨率高達7 200像素×1 080像素,有效保存了冰芯的細節信息。儀器工作穩定可靠,滿足科研工作的要求,為冰芯科研工作提供一種便捷高效的現場分析工具。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15