乘性噪聲干擾下基于交互多模型的目標(biāo)跟蹤*
2018-11-28 02:18:40廖書偉
傳感器與微系統(tǒng) 2018年12期
關(guān)鍵詞:模型
廖書偉, 劉 巍
(河南理工大學(xué) 電氣工程與自動(dòng)化學(xué)院,河南 焦作 454000)
0 引 言
隨著現(xiàn)代航空航天技術(shù)的飛速發(fā)展,目標(biāo)運(yùn)動(dòng)的實(shí)時(shí)性跟蹤越來越受關(guān)注。對(duì)各式各樣的飛行器的航速和機(jī)動(dòng)性能的要求也越來越高。當(dāng)目標(biāo)突然實(shí)施機(jī)動(dòng)(突然轉(zhuǎn)彎或加、減速等),只采用一個(gè)模型很難描述目標(biāo)的運(yùn)動(dòng)情況[1,2]。因此,Blom和Bar-shalom在廣義偽貝葉斯算法[3,4]的基礎(chǔ)上,提出了交互多模型算法(interacting multiple model,IMM)[5,6]。交互多模型算法是目標(biāo)多模型運(yùn)動(dòng)的常用算法之一,可盡可能真實(shí)地反映目標(biāo)的實(shí)際運(yùn)動(dòng)情況[7,8]。然而,經(jīng)典的IMM算法沒有考慮受乘性噪聲的影響,因此本文提出受乘性噪聲干擾的IMM算法對(duì)目標(biāo)運(yùn)動(dòng)的影響并驗(yàn)證。
IMM算法被廣泛應(yīng)用于許多不同的領(lǐng)域,如文獻(xiàn)[9]運(yùn)用IMM算法跟蹤機(jī)動(dòng)目標(biāo),研究結(jié)果表明用IMM算法跟蹤機(jī)動(dòng)目標(biāo)模型(特別是加速度較大)有明顯的優(yōu)勢(shì),文獻(xiàn)[10]研究多通道交互多模型跟蹤人體運(yùn)動(dòng),進(jìn)一步延展了IMM算法的應(yīng)用。文獻(xiàn)[11]通過IMM算法得到其派生算法,并用于跳躍馬爾可夫線性系統(tǒng)的風(fēng)險(xiǎn)濾波問題。文獻(xiàn)[12]提出IMM-卡爾曼濾波(Kalman filtering,KF)算法,該算法運(yùn)用于目標(biāo)跟蹤具有較好的跟蹤精度和穩(wěn)定性。文獻(xiàn)[13]結(jié)合粒子濾波和IMM算法,應(yīng)用于高速高機(jī)動(dòng)目標(biāo)的跟蹤,提高了對(duì)非線性系統(tǒng)下不確定情況的濾波性能,從而也優(yōu)化了跟蹤精度。文獻(xiàn)[14]結(jié)合無跡KF和IMM算法,提出了一種自適應(yīng)調(diào)整“當(dāng)前”統(tǒng)計(jì)模型的計(jì)算方法,提高了運(yùn)動(dòng)模式的匹配概率,改進(jìn)了跟蹤效果。然而,上述文獻(xiàn)仍沒有考慮乘性噪聲的影響。
乘性噪聲一般是由信道不理想引起的,其與信號(hào)是相乘的關(guān)系。如傳輸信號(hào)經(jīng)過電離層信道時(shí)的衰退或反射以及信號(hào)的采樣、選通、調(diào)制等[15]。文獻(xiàn)[16,17]研究的系統(tǒng)中,加性測(cè)量噪聲為有色噪聲,所得遞歸濾波算法較不考慮乘性噪聲有更好的性能。文獻(xiàn)[18]研究了受有色乘性噪聲干擾的線性離散系統(tǒng)的最優(yōu)狀態(tài)估計(jì)。文獻(xiàn)[19]研究了受乘性噪聲的干擾,馬爾可夫參數(shù)部分未知的線性系統(tǒng)的狀態(tài)估計(jì)問題,并驗(yàn)證考慮乘性噪聲情況下較不考慮乘性噪聲的性能提高明顯。在實(shí)際應(yīng)用中,因忽略乘性噪聲的影響,而導(dǎo)致性能嚴(yán)重的下降。因此,研究乘性噪聲干擾下的IMM算法很有必要。
在本文中,目標(biāo)運(yùn)動(dòng)的測(cè)量方程中含有乘性噪聲,通過聯(lián)合使用有乘性噪聲的Kalman濾波器[20]和IMM算法,得到一個(gè)針對(duì)乘性噪聲環(huán)境下的IMM算法,并驗(yàn)證考慮乘性噪聲的IMM算法優(yōu)于經(jīng)典的IMM算法,且能較準(zhǔn)確地反映目標(biāo)的實(shí)際運(yùn)動(dòng)情況。
1 乘性噪聲干擾下的KF
考慮如下系統(tǒng)
x(k+1)=A(k)x(k)+ω(k)
(1)
(2)
式中x(k)∈Rn為未知的狀態(tài)向量,ω(k)∈Rn為加性過程噪聲,ζμ,k∈Rn×n為乘性噪聲,y(k)∈Rp為輸出向量,v(k)∈Rp為加性測(cè)量噪聲,A(k),C(k),μ,k為適當(dāng)維數(shù)的矩陣。
假設(shè)系統(tǒng)滿足條件如下:
1)關(guān)于系統(tǒng)狀態(tài)噪聲ω(k)和觀測(cè)噪聲v(k)滿足:均值都為零,方差分別為Q(k),R(k) ,且ω(k),v(k)相互獨(dú)立。

因量測(cè)值yi(i=1,2,…,k)含有乘性噪聲ζμ,k,令yk[yT(0),yT(1),yT(2),…,yT(k)]T,令Y=y時(shí)X的線性最小均方誤差估計(jì)與相應(yīng)的最小均方誤差估計(jì)相等,即[X|Y=y]=E[X|Y=y]。
a.預(yù)測(cè)估計(jì)

(3)
b.預(yù)測(cè)誤差協(xié)方差
P(k|k-1)=A(k-1)P(k-1|k-1)AT(k-1)+
Q(k-1)
(4)
c.新息

(5)
d.卡爾曼增益
N(k)=C(k)P(k|k-1)CT(k)+R(k)+
(6)
(7)
K(k)=P(k|k-1)CT(k)×N-1(k)
(8)
e.濾波

(9)
f.濾波協(xié)方差
P(k|k-1)=(I-K(k)C(k))P(k|k-1)
(10)
將上述含有乘性噪聲的卡爾曼濾波算法應(yīng)用于經(jīng)典的IMM算法。
2 乘性噪聲干擾下的IMM算法
通過利用帶有乘性噪聲的KF及經(jīng)典的IMM算法[6],得到乘性噪聲干擾下的IMM算法,具體如下:
1)輸入交互:設(shè)模型i轉(zhuǎn)移到模型j的轉(zhuǎn)移概率為pij,則馬爾可夫鏈的轉(zhuǎn)移概率矩陣如下
(11)
(12)

(13)

2)乘性噪聲干擾下的IMM算法
對(duì)應(yīng)第j個(gè)模型,0j(k-1|k-1),P0j(k-1|k-1)以及觀測(cè)值Z(k)作為輸出進(jìn)行卡爾曼濾波,過程如下
(14)
預(yù)測(cè)誤差協(xié)方差
(15)
卡爾曼增益
Kj(k)=Pj(k|k-1)CT×[CPj(k|k-1)CT+

(16)
(17)
濾波
Kj(k)[y(k)-Cj(k|k-1)]
(18)
濾波協(xié)方差
Pj(k|k)=(I-Kj(k)C)Pj(k|k-1)
(19)
式中I為單位陣。
3)模型概率更新
由似然函數(shù)更新模型概率μj(k),模型j的似然函數(shù)為
(20)
式中vj(k)=Z(k)-Cj(k|k-1),Sj(k)=CPj(k|k-1)CT=R(k)
所以,模型j的概率為
(21)
4)交互輸出
總的狀態(tài)估計(jì)
(22)
總的協(xié)方差估計(jì)
(23)
由于經(jīng)典的IMM算法沒有考慮乘性噪聲的影響,當(dāng)實(shí)際系統(tǒng)受乘性噪聲干擾時(shí),性能下降嚴(yán)重,且現(xiàn)有的基于多模型的目標(biāo)跟蹤的算法[4,5,21,22]很少考慮乘性噪聲的影響。因此,為了提高實(shí)際系統(tǒng)目標(biāo)跟蹤的估計(jì)性能,本文提出了一個(gè)受乘性噪聲干擾的IMM算法。
3 目標(biāo)運(yùn)動(dòng)模型及仿真分析
3.1 狀態(tài)方程和量測(cè)方程
設(shè)狀態(tài)向量為

則狀態(tài)方程為
Xk=AiXk-1+BiWk-1,i=1,2,3
(24)
目標(biāo)運(yùn)動(dòng)的測(cè)量方程
(25)

對(duì)于上述問題,采用三個(gè)模型,第一個(gè)模型是非機(jī)動(dòng)模型;第二、三模型為機(jī)動(dòng)模型。控制模型的馬爾可夫鏈的轉(zhuǎn)移概率矩陣為
且各模型的概率為μ1=0.8,μ2=0.1,μ3=0.1。
3.2 恒速模型(非機(jī)動(dòng)模型)
當(dāng)非機(jī)動(dòng)目標(biāo)做勻速直線運(yùn)動(dòng)時(shí),狀態(tài)方程為
Xk=A1Xk-1+B1W
(26)
其中,系統(tǒng)的擾動(dòng)噪聲均為零均值、方差為Q=0.001I4×4,T=2 s為采樣周期,總的采樣點(diǎn)數(shù)為N=800/T
(27)
3.3 恒加速模型(機(jī)動(dòng)模型)
Xk=A2Xk-1+B2W,
(28)
Xk=A3Xk-1+B3W
A3=
(29)

定義濾波誤差的均值
(30)
定義濾波誤差的標(biāo)準(zhǔn)差
(31)
式中M=50為蒙特卡洛仿真次數(shù)。
采用兩點(diǎn)起始法,求得初始狀態(tài)為
(32)
3.4 仿真分析
目標(biāo)運(yùn)動(dòng)的真實(shí)軌跡如圖1所示。圖2~圖4分別給出了所提出的乘性噪聲干擾下的IMM算法與經(jīng)典的IMM算法這兩種方法的仿真比較結(jié)果。
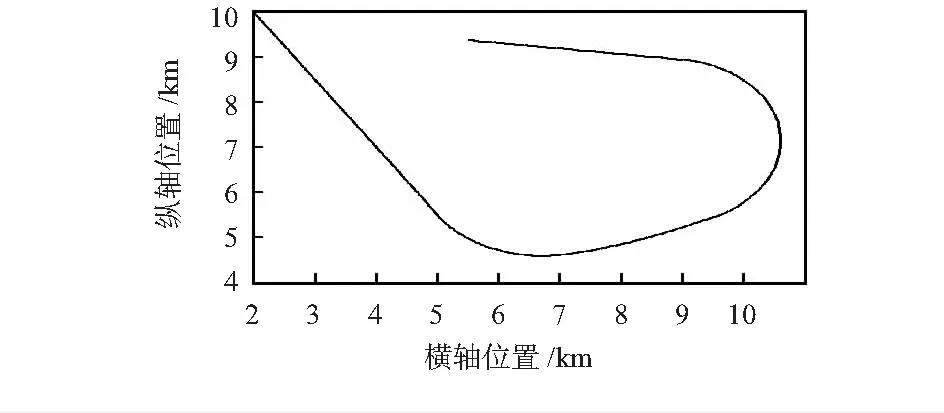
圖1 目標(biāo)運(yùn)動(dòng)的真實(shí)軌跡
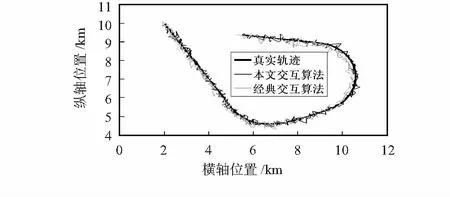
圖2 目標(biāo)運(yùn)動(dòng)的濾波軌跡
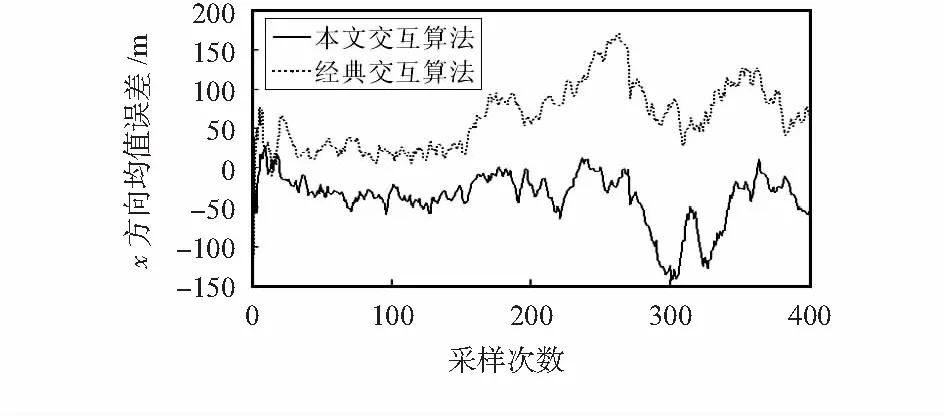
圖3 x方向?yàn)V波誤差的均值
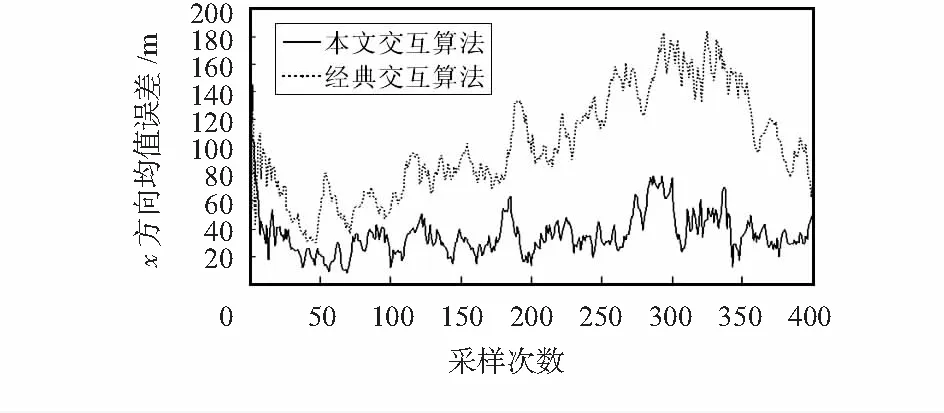
圖4 x方向?yàn)V波誤差標(biāo)準(zhǔn)差
圖2可以看出,前者濾波軌跡比后者濾波軌跡要更接近真實(shí)軌跡,且在轉(zhuǎn)彎機(jī)動(dòng)時(shí)使用聯(lián)合乘性噪聲的IMM算法比經(jīng)典的IMM算法的實(shí)時(shí)跟蹤更精確,效果更好。
圖3、圖4分別為由蒙特卡洛仿真計(jì)算得到的濾波誤差均值曲線和標(biāo)準(zhǔn)差曲線,可以看出,由于有兩次轉(zhuǎn)彎,在轉(zhuǎn)彎的前后誤差的均值有較大的波動(dòng)。隨后在目標(biāo)運(yùn)動(dòng)的軌跡變?yōu)閯蛩龠\(yùn)動(dòng)時(shí),隨著時(shí)間的推移,誤差均值再次在零值附近有較小的波動(dòng)。
由于x方向和y方向相同,仿真結(jié)果相類似,因此在結(jié)果分析中只分析了x方向的結(jié)果。
4 結(jié) 論
本文得到在乘性噪聲環(huán)境下的IMM算法,通過對(duì)目標(biāo)運(yùn)動(dòng)的建模及仿真分析,可以看出針對(duì)乘性噪聲環(huán)境的IMM算法較經(jīng)典的IMM算法能更有效地提高目標(biāo)的穩(wěn)定性和定位的準(zhǔn)確性。仿真結(jié)果表明了考慮乘性噪聲干擾下IMM算法的必要性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19