基于降維Capon的相干信號二維DOA估計算法
2018-11-02 03:22:12劉亞寧鄭桂妹
探測與控制學報 2018年5期
關鍵詞:信號
劉亞寧,張 秦,鄭桂妹
(空軍工程大學防空反導學院,陜西 西安 710051)
0 引言
近些年,二維DOA估計成為了研究陣列信號處理的熱點,在通信,雷達,探測等領域得到廣泛的應用。二維DOA估計一般采用的陣列信號模型包括L型陣列,均勻平面陣列和平行陣列[1-3],但也有一些特殊情況,如文獻[4]采用共形陣列,將二維DOA與極化狀態進行聯合估計。文獻[5]在稀疏陣列的基礎上,建立基于不動點迭代的空間譜函數,進行二維DOA估計。經典的二維DOA估計算法包括多重信號分類(MUSIC)[6],旋轉不變子空間(ESPRIT)[7],傳播算子(PM)[8],Capon算法[9]等。但這些經典算法大多存在穩定性差[10],計算量復雜[11]的不足,因此人們在這些傳統方法的基礎上也提出了不少改進算法。文獻[12]提出了一種基于特征空間的MUSIC算法來最大限度的利用信號以及噪聲子空間。文獻[13]采用Unitary-ESPRIT簡化了運算復雜度。閆鋒剛等[14]提出了一種半實值Capon算法來降低運算量。
以上所提算法在入射信號相互獨立的條件下可以進行有效的估計,但在實際情況下,由于傳播環境的復雜性,直射信號和多徑傳播得到的反射信號會形成相干信號。信號的相干性會導致協方差矩陣不滿秩,上文所提算法的估計精度將明顯下降甚至失效。為了解決這一問題,學者們提出了不少對應的解相干算法。常見方法有空間平滑算法以及toeplitz矩陣重構法。空間平滑算法應用最為廣泛,包括前向空間平滑算法(FSS)和前后向空間平滑算法(FBSS),如文獻[12]提出了一種基于特征空間MUSIC的空間平滑算法,文獻[15]實現了單快拍下利用空間平滑算法解相干。toeplitz矩陣重構法利用方向矢量的特性,對其線性組合進行toeplitz重排,從而達到解相干的目的,計算精度較高。
本文為了解決相干信號二維DOA估計采用傳統方法計算量過大的問題,提出了基于降維Capon的相干信號二維DOA估計算法。
1 降維Capon算法
1.1 信號模型
根據文獻可知在常見陣列結構中,L型陣列估計性能最優。因此,本文在L型陣列基礎上進行相干信號二維DOA估計。L型陣列在x-y平面上,由分別位于x軸和y軸上的N個陣元構成,陣元間隔為d。設遠場空間有k個窄帶信號源以不同二維波達方向入射,分別為(θ1,φ1),(θ2,φ2),…,(θk,φk)。其中,θk和φk分別表示第k個信號源的仰角和方位角。且θk∈[-90°,90°],φk∈[-90°,90°],αk和βk分別表示第k個信號源與x軸和y軸夾角。信號陣列模型如圖1所示。
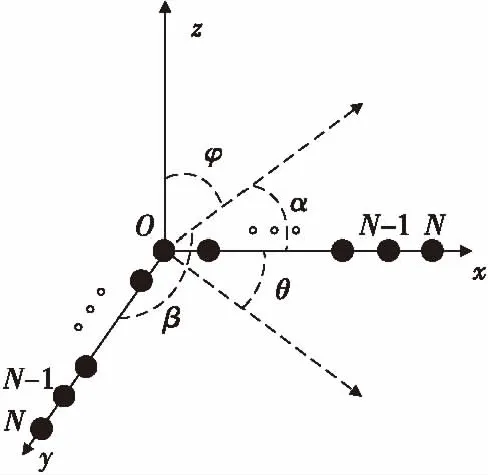
圖1 信號陣列模型Fig.1 Signal array model
兩個信號的相關系數可表示為:
(1)
當ρij=0時,兩信號相互獨立;當0<|ρij|<1時,兩信號相關;當|ρij|=1時,兩信號為相干信號。若信號相干,則x軸和y軸上陣元接收的信號模型為:
X(t)=Ax(θ,φ)S(t)+Nx(t)
(2)
Y(t)=Ay(θ,φ)S(t)+Ny(t)
(3)
式(2)和式(3)中,X(t)和Y(t)分別為x軸和y軸接收信號,Ax(θ,φ)=[ax(θ1,φ1),ax(θ2,φ2),…,ax(θk,φk)]為x軸陣元方向矩陣,ax(θk,φk)=(1,exp(j2πd/λ)cosθksinφk,…,exp(j2π(N-1)d/λ)·cosθksinφk)T,Nx(t)=[n1(t),n2(t),…,nN(t)]為x軸陣元接收到的噪聲矢量,Ay(θ,φ)=[ay(θ1,φ1),ay(θ2,φ2),…,ay(θk,φk)]為y軸陣元方向矩陣,ay(θk,φk)=(1,exp(j2πd/λ)sinθksinφk,…,exp(j2π (N-1)d/λ) sinθksinφk)T,Nx(t)=[n1(t),n2(t),…,nN(t)]為y軸陣元接收到的噪聲矢量,S(t)=[λ1,λ2,…,λk]s(t)表示相干信號(λk為復常數,s(t)為源信號)。陣元接收噪聲為均值為0,方差為σ2的高斯白噪聲,并與接收信號獨立。
1.2 解相干處理
相干信號的協方差矩陣不是滿秩矩陣,故不能直接采用常規二維DOA算法進行估計,本文采用前后向空間平滑算法進行解相干,恢復協方差矩陣的秩,再進行二維DOA估計。首先對x軸陣元進行解相干,將x軸看做由N個陣元組成的均勻線陣,將其劃分為Q個子陣,每個子陣有M個陣元,M=N-Q+1。以最左邊子陣為參考,則第q個前向子陣的輸出為:
AxmDq-1S(t)+Nq(t)
(4)
式(4)中,Axm為子陣對應方向矩陣,D=diag[γ1,γ2,…γk],γk=exp((j2πd/λ)sinαk),Nq(t)為子陣對應噪聲矢量。則此子陣的協方差矩陣為:
(5)
則前向空間平滑的協方差矩陣為:
(6)
同理,第q個后向子陣的輸出為:
AxmDq-1S(t)+Nq(t)
(7)
式(7)中,Axm為子陣對應方向矩陣,D=diag[γ1,γ2,…,γk],γk=exp((j2πd/λ)sinαk),Nq(t)為子陣對應噪聲矢量。則此子陣的協方差矩陣為:
(8)
后向空間平滑的協方差矩陣為:
(9)
(10)
同理,對y軸陣元進行處理后得到的協方差矩陣為:
(11)
因此,L型陣列解相干后的信號協方差矩陣為:
(12)
1.3 降維Capon算法
一般情況下二維Capon算法的空間譜為:

(13)
由圖1可推得:
(14)
由式(14)可得:
(15)
因此可得:
ax(θ,φ)=ax(α)=(1,exp(j2πd/λ)cosα,…, exp(j2π (M-1)d/λ)cosβ)T
(16)
ay(θ,φ)=ay(β)=(1,exp(j2πd/λ)cosβ,…, exp(j2π(M-1)d/λ)cosβ)T
(17)
式(13)可表示為:

(18)
根據Kronecker積性質可將ax(α)?ay(β)轉換成[ax(α)?IM]ay(β),則式(18)可表示為:

(19)
由于ax(α)∈CM,ay(β)∈CM,Rfb∈CM×M,Capon的運算均為復值運算,一次復值運算包括四次實值運算。如果只進行一次實值運算便可完成DOA估計,則計算量將減少75%,因此本文參考文獻方法引入一種半實值Capon算法(SRV-Capon)來完成二維DOA估計。
對協方差矩陣Rfb進行特征值分解可得:
Rfb=SUSSH+NUNNH
(19)
式(19)中,信號子空間S=[u1,u2,…,uk],噪聲子空間N=[v1,v2,…,vM-k],uk為Rfb中較大的k個特征值對應的特征向量,vM-k為Rfb中較小的M-k個特征值對應的特征向量。US,UN均為特征值矩陣,其主對角線分別為k個大特征值ξ1,ξ2,…,ξk,和M-k個小特征值。
因為信號子空間和噪聲子空間互補正交,因此容易證明:
(Rfb)-1=S(US)-1SH+σ-2NNH=σ-2(SCSNRSH+NNH)
(20)
式(20)中,CSNR=σ2(US)-1。
(21)

(Rfb)-1≈σ-2NNH
(22)
根據二維MUSIC空間譜函數和式(18)、式(22)可得:
f2D-cap(α,β)≈σ-2f2D-music(α,β)
(23)
利用Woodbury公式[12](U+V)-1=U-1-V-1·(I+VU-1)-1VU-1可得:
Re-1(Rfb) =2(Rfb+(Rfb)*)-1= 2(Rfb)-1-2(Rfb)-1(I+(Rfb)*·
(Rfb)-1)-1(Rfb)*(Rfb)-1
(24)
將式(22)代入式(24)得:
Re-1(Rfb) ≈2σ-2NNH-2σ-2HNNH=
2σ-2(I-H)NNH
(25)
式(25)中,H=(Rfb)-1(I+(Rfb)*(Rfb)-1)-1(Rfb)*。
根據矩陣性質可得
Re-1(Rfb)∈R(N)
(26)
將式(24)中Rfb和(Rfb)*互換位置,再按照式(24)和式(25)推導可得:
Re-1(Rfb)∈R(N*)
(27)
結合式(26)和式(27)可得:
Re-1(Rfb)∈R(N)∩R(N*)
(28)
定義式(19)分母為Φ:
Φ=ay(β)H[ax(α)?IM]H·
(Rfb)-1[ax(α)?IM]ay(β)
(29)
此算法便轉化為求Φ最小值時對應的α,β值。設G(α)=[ax(α)?IM]H(Rfb)-1[ax(α)?IM]。再將(Rfb)-1替換成Re-1(Rfb),因為ax(α)∈CM,ay(β)∈CM,Re-1(Rfb)∈RM×M,所以此運算可看作半實值處理,可得P(α)=[ax(α)?IM]HRe-1(Rfb) [ax(α)?IM],易得ay(β)Hay(β)=M,則將(29)轉化為:
(30)
利用Rayleigh-Ritz理論[16]可得,式(30)的最小值為M×λmin(α),λmin(α)為P(α)的最小特征值,可表示為:
(31)
因此α的估計值可由下式推得:
(32)
由式(28)和式(32)可得:在α的對稱角度-α上,也可取到式(30)的最小值,因此,我們可以把搜索范圍縮小到原來的一半,但要通過比較G(α)和G(-α)的大小來判斷哪一個為正確的α估計值。
其判斷標準為:
1)若G(α)?G(-α),則α為正確估計值;
2)若G(-α)?G(α),則-α為正確估計值;
3)若G(-α)≈G(α),則α和-α均為正確估計值。

ay(βk)=emin(P(αk))
(33)
定義φk=angle(ay(βk)),結合式(17),可得:
φk=[0,(2πd/λ)cosβk,…,(2π(M-1)d/λ)cosβk]T
(34)
利用式(25)估計βk可采用最小二乘法[17],令:
(35)
即求解min‖Cdk-φk‖2,可得其結果為:
(36)
式(36)中,dk(2)為結果值,則βk可由下式得:
βk=arcsin(dk(2)/(2πd/λ))
(37)
2 相干信號二維DOA估計算法
2.1 算法流程
本文所提基于降維Capon的相干信號二維DOA估計算法流程為:
步驟1)先采用FBSS解相干,得到陣元數為M的子陣的滿秩協方差矩陣。
步驟2)提取子陣協方差矩陣的實部,代入一種半實值Capon算法進行DOA估計。
步驟3)利用Kronecker積的性質求出P(α)的最小特征值,代入式(32)得到α估計值,再根據G(α)的判斷標準篩選出正確的α估計值。
步驟4)根據式(33)—式(37),得到β估計值。
步驟5)按照式(15)得到二維DOA估計值。
2.2 計算量分析
按照上述步驟分析本文算法的計算量,并與常規二維Capon算法(2D-Capon)進行對比,設快拍數為L,搜索點數為n,子陣個數為M。
步驟1)解相干求滿秩協方差矩陣的計算量為O{(N-M)L(2M+3)}。
步驟2)求最小特征值以及篩選正確估計值的計算量為O{n[(M2+M)-K(M+1)]+5M2K}。
步驟3)求β估計值的計算量為O{10M}。
步驟4)計算量可以忽略不計。
綜上可得總計算量為O{(N-M)L(2M+3)+n[(M2+M)-K(M+1)]+5M2K+10M}。而常規二維Capon的計算量為O{(N-M)L(2M+3)+4n(M2+M)+4M2K+10M}。
為直觀表示,給出具體數值作圖2來對比兩種算法的計算量大小。設N-M=2,快拍L=100,信號個數K為3,搜索點數n=3×103,由圖2可得,本文算法相比常規二維Capon算法計算量顯著減小,可比常規算法減少接近75%。
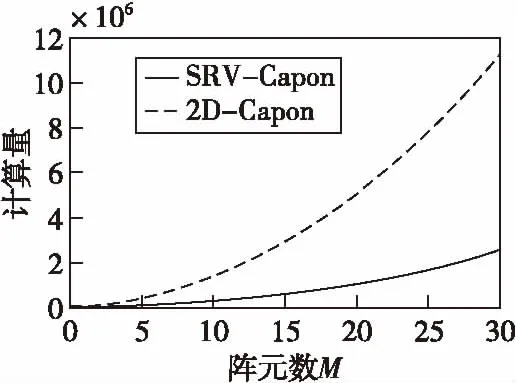
圖2 兩種算法計算量對比圖Fig.2 Comparison chart of two algorithms’ computation complexity
3 仿真驗證
3.1 算法的正確性驗證
(38)
式(38)中,Eθ為方位角的標準誤差,Eφ為仰角的標準誤差。
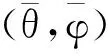
為了驗證本算法,進行如下仿真。假設陣列為平面陣列,有3個窄帶信號入射到陣列上,其入射角度分別為(15°,10°),(25°,35°),(40°,50°)。x軸,y軸方向陣元個數均為8,子陣個數為6,陣元間隔d=λ/2,角度搜索精度為0.01°。快拍數L為50,信噪比SNR為20 dB,進行500次蒙特卡羅實驗。圖3目標二維DOA估計值顯示了三個信源條件下本算法的估計結果。從圖中可看出,對三個目標的入射角度估計基本保持在真實值周圍,波動較小,表明本算法能正確對二維DOA進行估計,并且精度較高。
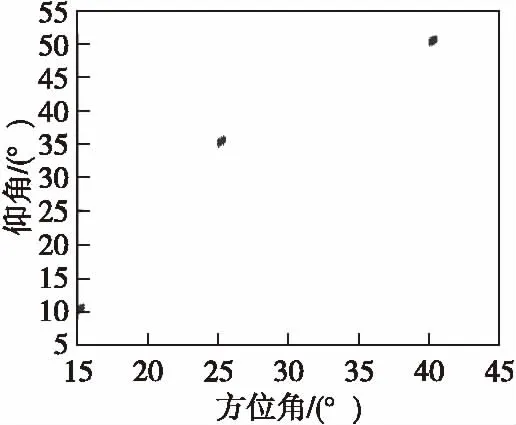
圖3 目標二維DOA估計值Fig.3 Estimation of target 2D DOA
3.2 信噪比與估計性能的關系
采用同4.1節相同的實驗驗參數,蒙特卡羅實驗次數為500,快拍數為50,x軸,y軸方向陣元個數均為8,子陣個數為6,信噪比分別取-4 dB,0 dB,4 dB,8 dB,12 dB,16 dB,20 dB。將本文算法與2D-Capon和常規二維MUSIC算法(2D-MUSIC)進行比較,結果如圖4所示。
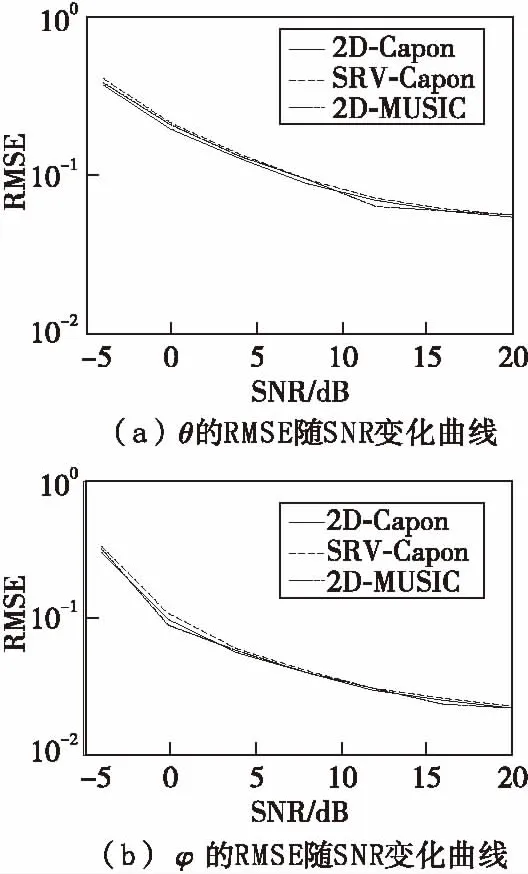
圖4 RMSE與SNR關系圖Fig.4 The relationship between RMSE and SNR
由圖3可得,本文算法和2D-Capon和2D-MUSIC算法在信噪比較小的時候有一定差距,但隨著噪比增大,差距差距逐漸縮小,估計精度基本相同,且兩個角度的估計值RMSE隨信噪比的增大逐漸減小,說明估計性能逐漸變好,但減小的趨勢越來越緩。
3.3 快拍數與估計性能的關系
采用同4.1節相同的實驗參數,蒙特卡羅實驗次數為500,x軸,y軸方向陣元個數均為8,子陣個數為6,信噪比取20 dB,快拍數分別為10,20,40,60,80,100,120,140,160。將本文算法與2D-Capon和2D-MUSIC進行比較,結果如圖5所示。
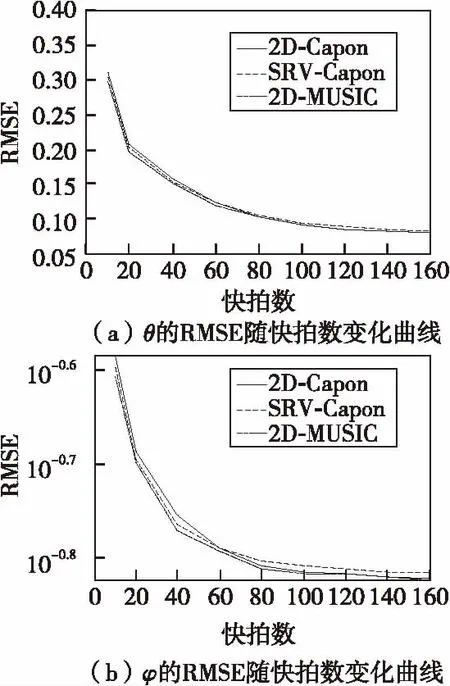
圖5 RMSE與快拍數關系圖Fig.5 The relationship between RMSE and snapshot
由圖5可得,當快拍數小于40的時候,本文算法RMSE小于2D-Capon,本文給出的分析是在小快拍下,信號相關性較大,復數域范圍的協方差矩陣相比于實數域范圍的協方差矩陣秩虧更大,因此有可能導致2D-Capon估計性能不如SRV-Capon。當快拍數較大時,本文算法相比2D-Capon和2D-MUSIC算法基本相同。隨著快拍數的增大,RMSE值減小,但RMSE值減小的趨勢越來越緩。說明雖然估計性能越來越好,但變好的趨勢是越來越緩。由于快拍數的選擇影響算法的計算復雜度,因此并非快拍數越大越好。
4 結論
本文提出了基于降維Capon的相干信號二維DOA估計算法,該算法采用空間平滑和半實值降維Capon算法,相比常規二維Capon算法,計算量顯著減小,仿真結果表明本文算法的估計性能與常規二維Capon算法和二維MUSIC算法基本相同。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06