快響SAR衛(wèi)星零多普勒波束中心姿態(tài)機動策略研究
2018-09-18 06:38:58,,,,
中國空間科學技術 2018年4期
,,,,
1.空間電子信息技術研究院,西安 710100 2.陜西諾維北斗信息科技股份有限公司,西安 710100
快響SAR衛(wèi)星是一種以合成孔徑雷達(SAR)為有效載荷的對重點區(qū)域、災害緊急事件等快速響應衛(wèi)星,在軌實時成像處理器是快響SAR衛(wèi)星核心設備。波束中心多普勒頻率是SAR成像處理中的關鍵參數(shù),它與衛(wèi)星和地面目標的相對運動(地球自轉(zhuǎn)引起)、天線與衛(wèi)星安裝偏差和天線波束距離方位離軸角(波束在距離和方位向上偏離天線機械主軸)有關。對于X波段SAR系統(tǒng),偏心率0.001 1的太陽同步軌道的SAR衛(wèi)星,波束中心多普勒頻率受地球自轉(zhuǎn)的影響很大,全球范圍內(nèi)引起最大為29 kHz的多普勒頻率偏移,天線波束方位向離軸角如0.46°引起3 950 Hz多普勒頻率偏移,天線與衛(wèi)星安裝造成天線機械系與衛(wèi)星本體系俯仰軸0.04°偏差引起約360 Hz多普勒頻率偏移,造成多普勒頻率關于脈沖重復頻率模糊、方位脈沖壓縮、距離徙動校正和地理定位誤差增大,因而需要施加運動補償?shù)人惴ǎ绕鋵τ诳祉慡AR衛(wèi)星在軌實時成像處理器,加大實時處理算法難度。同時觀測視角50°下天線波束距離向離軸角0.21°將引起斜距偏差4.68 km,天線與衛(wèi)星安裝造成天線機械系與衛(wèi)星本體系橫滾角0.07°偏差將引起斜距偏差1.6 km,從衛(wèi)星姿態(tài)機動控制波束指向補償快響SAR衛(wèi)星等效斜視多普勒頻率和斜距偏差被廣泛應用。
文獻[1-6]采用圓軌道近似推導出來的一維偏航角控制調(diào)整波束指向,通過衛(wèi)星平臺繞星下點方向旋轉(zhuǎn)實現(xiàn),僅補償?shù)厍蜃赞D(zhuǎn)引起的波束中心多普勒頻率偏移,由于實際衛(wèi)星運行軌道為橢圓軌道,采用一維偏航控制后仍存在較大的多普勒頻率偏移。文獻[7-11]增加俯仰控制后二維偏航牽引將地球自轉(zhuǎn)引起的多普勒頻率補償至0 Hz,未考慮補償天線與衛(wèi)星安裝偏差和波束俯仰方位離軸角引起的多普勒頻率。文獻[12-14]基于地球同步軌道SAR推導出二維姿態(tài)控制方法補償?shù)厍蜃赞D(zhuǎn)引起的多普勒頻率,均未考慮天線與衛(wèi)星安裝偏差和波束距離方位離軸角引起的殘差多普勒頻率和斜距偏差,而且地球同步軌道高度約3.6×104km,很小的角度偏差導致波束指向偏差較低軌衛(wèi)星更為嚴重。
針對上述問題,借鑒文獻[14]將波束中心調(diào)整到零多普勒面內(nèi)使得回波瞬時多普勒中心頻率為零的思想,創(chuàng)新性地在跟地球固連且轉(zhuǎn)動的坐標系中建立了包含零多普勒面的輔助坐標系三軸指向和實際波束中心多普勒頻率為0 Hz的天線波束三軸指向模型,同時消除天線與衛(wèi)星安裝偏差、實際波束中心距離方位離軸角的影響,推導出地心固定坐標系內(nèi)衛(wèi)星本體三軸指向和三軸姿態(tài)機動參數(shù),實現(xiàn)波束中心的零多普勒偏航牽引和橫滾角的大角度機動。降低了快響SAR衛(wèi)星實時處理器復雜度,同時使得實際波束中心最小斜距等于目標零多普勒時刻斜距,提高SAR系統(tǒng)發(fā)射時序設計精度,滿足快響SAR衛(wèi)星自主任務規(guī)劃和快速機動的需求。
1 快響SAR衛(wèi)星零多普勒波束中心姿態(tài)機動參數(shù)算法
算法研究涉及的空間坐標系為:地心固定坐標系Oe-XeYeZe、衛(wèi)星軌道系Oorb-XorbYorbZorb、衛(wèi)星本體系Osc-XscYscZsc、天線法線系Oa-XaYaZa及天線波束坐標系Obeam-XbeamYbeamZbeam,如圖1所示。
快響SAR衛(wèi)星零多普勒中心機動參數(shù)計算方法包含3個主要步驟,分別為觀測目標場景載荷時序規(guī)劃和觀測參數(shù)計算、地心固定坐標系內(nèi)天線法線坐標系三軸指向確定、姿態(tài)機動參數(shù)確定。
(1)觀測目標場景載荷時序規(guī)劃和觀測參數(shù)計算
根據(jù)需要觀測的目標場景中心經(jīng)度、地理緯度、高程信息,計算載荷工作的時序參數(shù)如脈沖重復頻率、相對采樣起始時間,以及載荷條帶工作模式的觀測參數(shù)如觀測視角、左右側(cè)視。
首先將目標場景中心經(jīng)度、地理緯度、高程信息轉(zhuǎn)換為地心固定坐標系中三維位置矢量,其次高精度預報目標場景觀測弧段地心固定坐標系中衛(wèi)星位置矢量和速度矢量。地心固定坐標系中目標場景中心多普勒頻率為:
(1)
式中:Rs為地心固定坐標系下衛(wèi)星的位置矢量;Rt為地心固定坐標系下目標場景中心的位置矢量;Vs為地心固定坐標系下衛(wèi)星的速度矢量;λ為載波波長;Rst為衛(wèi)星與目標場景中心之間的距離。
式(1)中fdc=0時的星歷時刻為t0,實際波束在天線法線系中方位離軸角引起的時間偏移Δt,以t0+Δt為整個成像時序的中心,根據(jù)方位分辨率計算成像時間Ts,則成像時間范圍為[t0+Δt-0.5Ts,t0+Δt+0.5Ts]。其次,根據(jù)零多普勒時刻衛(wèi)星與目標場景中心之間的斜距Rst0在斜距關聯(lián)時序表中查找時序參數(shù)脈沖重復頻率、相對采樣起始時間。零多普勒時刻目標場景中心觀測視角為:
(2)
式中:Rs0為目標場景中心零多普勒時刻地心固定坐標系下衛(wèi)星的位置矢量。目標場景中心左右觀測標識計算方法為:
(3)
(4)
式中:Ytemp0為零多普勒時刻地心固定坐標系中軌道面法線反向單位矢量,如果β>90°,η=-1,需要衛(wèi)星機動左側(cè)視觀測目標場景;β<90°,η=1,需要衛(wèi)星機動右側(cè)視觀測目標場景。
(2)地心固定坐標系內(nèi)天線法線坐標系三軸指向確定
首先,為了修正地球自轉(zhuǎn)引起的多普勒中心頻率,建立目標場景中心各個觀測時刻臨時輔助坐標系,YtempOtempZtemp為零多普勒面,臨時輔助系三軸指向單位矢量均在地心固定坐標系中定義:
(5)
其次,為了修正地球自轉(zhuǎn)和天線波束俯仰方位離軸角引起的多普勒中心頻率,使得實際照射波束中心指向Zbeam處于零多普勒面內(nèi)觀測目標場景方向,使得波束中心斜距與第一步時序設計參數(shù)斜距無偏差,天線波束坐標系三軸指向在地心固定坐標系中單位矢量為:
(6)
然后,根據(jù)天線波束在天線法線坐標系內(nèi)的距離方位離軸角,確定天線法線系三軸指向在地心固定坐標系中的單位矢量為:
Xa=Xbeamcosθaz-Ybeamsinθazsinθtemp+
Zbeamsinθazcosθtemp
(7)
Ya=Ybeamcosθtemp+Zbeamsinθtemp
(8)
Za= -Xbeamsinθaz-Ybeamcosθazsinθtemp+
Zbeamcosθazcosθtemp
(9)
式中:θaz為波束在天線法線坐標系內(nèi)XaZa平面內(nèi)偏離Za軸的方位角;定義輔助計算的臨時角θtemp=arctan(tanθelcosθaz),θel為波束在天線法線坐標系內(nèi)YaZa平面內(nèi)偏離Za軸的距離角。
(3)姿態(tài)機動參數(shù)確定
為了修正天線與衛(wèi)星安裝及安裝偏差引起的多普勒頻率,根據(jù)天線與衛(wèi)星安裝時給出打靶測量安裝數(shù)據(jù),計算得到天線法線系與衛(wèi)星本體系安裝偏差矩陣即衛(wèi)星本體系至天線法線系轉(zhuǎn)換矩陣Min_err,同時根據(jù)地心固定坐標系至地心軌道系轉(zhuǎn)換方法[15-16]得到地心固定坐標系至地心軌道系轉(zhuǎn)換矩陣為Morb/e,計算衛(wèi)星軌道坐標系中衛(wèi)星本體坐標系三軸指向單位矢量為:
(10)
然后,根據(jù)姿態(tài)轉(zhuǎn)序,給出快響SAR衛(wèi)星零多普勒中心姿態(tài)機動參數(shù)三軸歐拉角,下面給出3-2-1轉(zhuǎn)序下的歐拉角參數(shù):
(11)
式中:Xsc_in_orb(3)是矢量Xsc_in_orb的第3個元素;Xsc_in_orb(2)是矢量Xsc_in_orb的第2個元素;Ysc_in_orb(3)是矢量Ysc_in_orb的3個元素;θpitch為俯仰角;θroll為橫滾角;θyaw為偏航角。其他姿態(tài)轉(zhuǎn)序下歐拉角參數(shù)可根據(jù)轉(zhuǎn)序?qū)淖藨B(tài)轉(zhuǎn)換矩陣[17]類似給出。
2 設計實例和仿真結(jié)果
通過設計實例和Matlab軟件仿真說明了上述機動策略的有效性,此次設計實例的輸入?yún)?shù)如表1所示。
圖2(a)給出表1參數(shù)下地球自轉(zhuǎn)引起的多普勒頻率隨衛(wèi)星緯度幅角的變化關系,一軌內(nèi)變化范圍為-22~29 kHz;圖2(b)給出表1參數(shù)下波束方位向偏離角引起的多普勒頻率隨衛(wèi)星緯度幅角的變化關系,一軌內(nèi)變化范圍為3 923~3 950 Hz;圖2(c)給出表1參數(shù)下安裝偏差引起的多普勒頻率隨衛(wèi)星緯度幅角的變化關系,一軌內(nèi)變化范圍為-357.5~-354.5 Hz。圖3(a)給出了零多普勒波束中心姿態(tài)機動參數(shù)3-2-1轉(zhuǎn)序下歐拉角,同時修正了地球自轉(zhuǎn)、波束距離方位離軸角和天線安裝偏差,修正后的波束中心多普勒頻率如圖3(b)所示,剩余多普勒頻率為0 Hz。

表1 輸入?yún)?shù)
快響SAR衛(wèi)星在軌自主任務規(guī)劃時系統(tǒng)設計通常將零多普勒時刻目標場景中心斜距作為SAR時序設計的依據(jù),傳統(tǒng)的偏航牽引姿態(tài)機動方法均未修正安裝偏差和波束距離向離軸角,使得波束中心指向偏離目標場景,造成目標場景回波接收不全,影響快響SAR衛(wèi)星對重點區(qū)域目標的觀測性能。表2給出表1輸入?yún)?shù)下零多普勒時刻目標與衛(wèi)星斜距(時序設計參考斜距)、姿態(tài)機動控制過程中未修正各項偏差時波束中心斜距和文中姿態(tài)機動控制策略修正偏差后波束中心斜距。表2仿真結(jié)果數(shù)據(jù)顯示,未修正安裝偏差和距離向離軸角波束中心斜距(868.048 km)與零多普勒時刻目標與衛(wèi)星斜距(874.326 km)偏差為6.278 km,并且同時修正安裝偏差和距離向離軸角波束中心斜距(874.327 km)與零多普勒時刻目標與衛(wèi)星斜距偏差(874.326 km)偏差為1 m,補償至米量級。
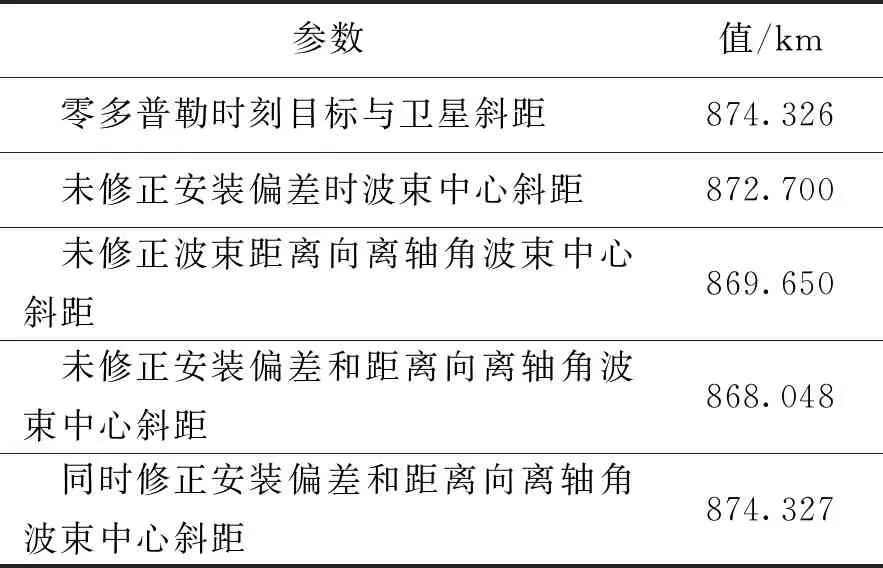
參數(shù)值/km零多普勒時刻目標與衛(wèi)星斜距874.326未修正安裝偏差時波束中心斜距872.700未修正波束距離向離軸角波束中心斜距869.650未修正安裝偏差和距離向離軸角波束中心斜距868.048同時修正安裝偏差和距離向離軸角波束中心斜距874.327
以上是安裝偏差準確測量情況下的仿真結(jié)果,實際工程中,由于發(fā)射過程震動、在軌星體熱變形[18]等引起安裝關系變化進行引起天線波束指向變化,引起波束中心多普勒頻率偏移。因此,需要通過地面定標技術定期標定波束指向偏差。可通過姿態(tài)三軸橫滾角、俯仰角和偏航角預留指向偏差轉(zhuǎn)換的橫滾角、俯仰角和偏航角修正值上注接口,從而修正在軌安裝關系變化引起的波束指向偏差和波束中心多普勒頻移。通過一定的定標技術,橫滾角、俯仰角和偏航角修正精度可以達到0.02°,此時引起的波束中心多普勒頻率偏移最大為242 Hz,如圖4所示。引起波束中心斜距與零多普勒時刻目標斜距偏差300 m。
由公式推導和仿真結(jié)果可以得出,姿態(tài)機動策略能夠同時或單獨修正地球自轉(zhuǎn)、天線安裝偏差和波束方位離軸角引起的多普勒頻率偏移,使得波束中心多普勒頻率為零,同時使得波束中心斜距與零多普勒時刻目標斜距偏差減小至米的量級。且實際工程定標修正精度內(nèi)多普勒頻率偏移為24 Hz,斜距偏移為300 m。因此,在姿態(tài)機動性能上優(yōu)于傳統(tǒng)偏航牽引方法。
3 結(jié)束語
快響SAR衛(wèi)星零多普勒波束中心姿態(tài)機動策略,采用矢量法公式推導可同時消除地球自轉(zhuǎn)、天線安裝偏差和波束距離方位向離軸角引起波束中心多普勒頻率偏移和波束中心斜距偏差,該方法具有通用性,根據(jù)天線安裝及波束距離方位離軸角,可單獨消除地球自轉(zhuǎn)引起的波束中心多普勒頻率偏移和斜距偏差,可以將其應用于SAR衛(wèi)星條帶模式姿態(tài)控制系統(tǒng)中,有效提高SAR系統(tǒng)時序設計精度,同時降低在軌實時處理器算法復雜度。但SAR衛(wèi)星實際在軌運行后發(fā)射震動和熱變形等會引起安裝關系變化,因此需要進一步深入研究SAR衛(wèi)星波束指向高精度定標方法,減小安裝關系變化的影響。