結合自組織映射網絡及三角形算法的星圖識別方法
2018-09-18 06:38:48,,,,,,
中國空間科學技術 2018年4期
,,,,,,
1.中國科學院 上海技術物理研究所 中國科學院紅外探測與成像技術重點試驗室,上海200083 2.中國科學院大學,北京100049
飛行器的導航技術是飛行器進行太空探索的關鍵技術之一,而飛行器姿態的解算是導航技術的基礎。依據不同的參考系,可制作不同的姿態敏感器,如地球敏感器、太陽敏感器及恒星敏感器(簡稱星敏)等。相對于其他光電姿態敏感設備,恒星敏感器具有測量精度高、抗干擾能力強、能實現自主導航等優點,目前已成為衛星等航天器上最主要的姿態測量儀器。
恒星敏感器的關鍵技術主要包括:星點質心提取、星圖識別和姿態解算,其中星圖識別過程決定著恒星敏感器的姿態識別率、姿態輸出速度。目前,國內外提出了很多星圖識別方法[1],文獻[2]將其分為3大類:基于星座特征的方法、基于字符模式的方法、基于智能行為的方法。其中,基于星座特征的三角形算法是最經典且應用最廣的算法,該方法簡單易懂,易于實現,但是存在識別速度慢、易出現冗余匹配等問題。國內外不少學者從各方面對三角形方法進行了改進,例如優化搜索方法[3-4]、采用不同的天區分割方法[5]、構建不同的特征量[6-10],這些方法都一定程度上提高了搜索的速度,減少了匹配冗余。此外,基于星座特征的方法還包括主星識別算法[11-12]及匹配組算法[13-14]。基于字符模式的算法主要指柵格算法,該算法由Padgett提出[15],具有識別速度快、存儲量小的優點,但當干擾較大時,識別率會迅速下降,且要求觀測星不可少于6個,為了提高網格算法的識別率,先后出現了彈性灰度網格算法[16]、圓形柵格算法[17]、擴充柵格法[18]、KMP星圖識別算法[19]。基于智能行為的方法是隨著人工智能的發展而提出的,主要包括基于遺傳算法的識別方法和基于神經網絡的識別方法。其中,神經網絡技術最早于1989年被Alveda提出應用到識別算法中[20],隨后Hong提出了基于模糊神經網絡的星圖識別方法[21],國內學者也做了相應的研究[22-23],已有的基于神經網絡的算法在訓練結束后可以實現快速識別,但是實現較困難,存在一定的誤識別。
本文將神經網絡技術中的自組織映射網絡(Self-Organizing Map, SOM)應用在星圖識別當中,首先根據觀測星的分布特點實現SOM網絡的模糊識別,確定與觀測星相似的恒星,縮小三角形的搜索范圍,再利用三角形算法查找到匹配的三角形,驗證后計算得到姿態信息。該方法結合了SOM網絡優秀的分類能力以及三角形算法可靠的角距匹配能力,縮小三角形的搜索范圍實現快速匹配的同時,提高了系統的抗干擾性和可靠性。本文以全天星圖識別為研究目標,實現了新算法的仿真測試,并基于實驗結果進行了比較和探討。
1 導航星的選取
星圖識別的實質就是從星表中找到與觀測星所匹配的導航星,作為星圖識別的唯一判斷依據,導航星的選取至關重要。既要保證星表的完備性,又要適當刪減星表中多余的導航星,減少星表數據存儲量,提高數據利用率[24]。基于系統的成像性能及識別算法的特點,篩選并組建出適合識別系統的導航星星庫。
1.1 挑選基本星表
本文用于仿真的星敏感器的性能是:方視場15°×15°,星等的靈敏度可達6.0視星等。選用2007年發表的第二版《依巴谷星表》作為基本星表,該星表中恒星的位置精度高達千分之一角秒,滿足精度需求。選出依巴谷星表中星等小于6.0且有確定赤經和赤緯的恒星,共5041顆,由于這其中包含了星等值不確定的“變星”和兩星之間角距太小的“雙星”,需要對星表進行進一步的處理。
1.2 選擇性刪除變星
對于星表中的變星,進行有選擇性的刪除,由于部分變星在亮度變換范圍內均能成像,部分變星的變化范圍超出了可觀測的最高星等,所以保留星等最大值小于6.0的變星,刪除星等最小值小于6.0且最大值大于6.0的恒星,總共刪除62顆變星。
1.3 合并雙星
由于恒星的成像會經過彌散處理擴散到多個像元,當兩顆星之間的角距很小時會使兩顆星的成像像素重疊,從而干擾單星的提取精度,甚至將兩顆星誤判為一顆星。在很多星表的預處理過程中,采用了刪除兩顆星或者兩顆中較暗星的方式,這樣處理比較簡單,但是當視場中恒星數量不多時,會影響系統的識別率。本文采用合并雙星的方法,根據所仿真的恒星敏感器的性能指標,選擇將角距小于0.059°(4個像元尺寸大小)的雙星合并,得到一顆擁有新的星等、赤經和赤緯的恒星,刪除星表中構成雙星的兩顆星,加入合并生成的星。設兩顆星的星等分別為m1、m2,亮度分別為d1、d2,方向矢量分別為v1、v2,兩顆星之間的角距為p;合并的新星的星等、亮度、方向矢量分別為m、d、v,與原兩顆星之間的角距分別為p1、p2,當用光流密度來表示星的亮度時[25],兩顆星的亮度比
d1/d2=e(m2-m1)/2.5
(1)
合并得到星的亮度可以看成是兩顆星的亮度的合成,于是有
d=d1+d2
(2)
通過推導,得到合并后新星的星等
m=m2-2.5ln[1+e(m2-m1)/2.5]
(3)
又由于角距與亮度存在關系式
d1p1=d2p2
(4)
得到
p=p1+p2=p1[1+e(m2-m1)/2.5]
(5)
根據方向矢量與角距的關系式
vsinp=v1sinp1+v2sinp2≈v1p1+v2p2
(6)
從而得到合并后新星的方向矢量v為
v=(v1p1+v2p2)/sinp
(7)
根據坐標轉換公式,得到新的赤經赤緯。
試驗中發現,星表中存在3顆星之間的角距均小于0.059°,在這種情況下,將其中兩顆星合并之后再與第三顆星合并,最終形成一顆新的星,將其替換原有的三顆星。雙星處理過程挑選出了27對雙星,實際刪除51顆,加入25顆合并后的星。經過變星及雙星處理,星表最后剩下4953顆恒星。
2 結合SOM網絡及三角形算法的星圖識別方法
2.1 識別系統原理
本文提出了一種結合神經網絡技術及三角形算法的星圖識別方法,恒星敏感器工作期間,在沒有先驗姿態的情況下,可以采用該方法進行全天星圖識別。如圖1所示,該識別系統主要包括兩部分:星表的預處理分類、實測星圖的識別。
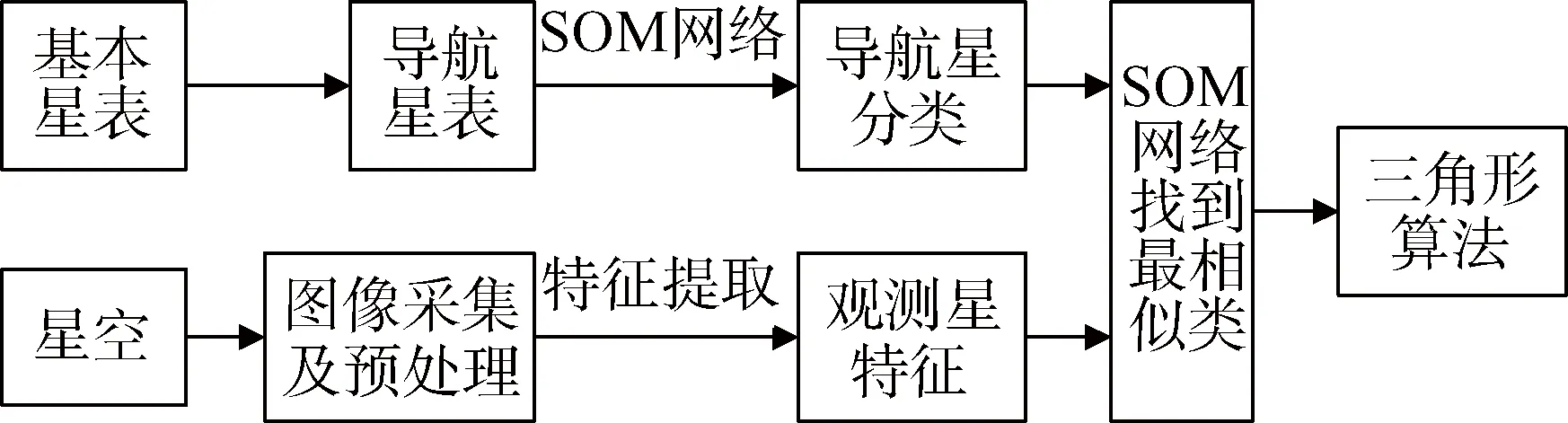
圖1 識別系統的原理Fig.1 Schematic diagram of recognition system
預處理分類過程中,基于篩選好的星庫,根據每顆星的鄰近星的分布特點,構造特征向量,采用神經網絡技術構建分類網絡,將星表中所有恒星分成多類,并將每顆恒星與其鄰近星的組合三角形信息存儲在對應的三角形庫中。
星圖識別過程中,用同樣的方法生成待識別星的特征向量,通過分類網絡輸出最相似類,在該類對應的三角形庫中應用三角形算法,找到匹配三角形。當驗證成功之后,計算并輸出該識別姿態。
2.2 SOM網絡
自組織特征映射網絡又稱為自組織映射網絡(SOM),最早由神經網絡專家Kohonen于1981年提出。它模擬了大腦中不同區域的神經網絡細胞分工不同的特點,通過網絡的學習,使不同區域有不同的響應特征[26]。自組織映射算法是無監督學習算法的一種,網絡的分類由多個輸入神經元共同協作完成。SOM網絡輸出層引入了拓撲結構,每個神經元附近的神經元會得到更新,使相鄰神經元變得更相似,以更好地模擬生物學中的側抑制現象,具有聚類和高維可視化的特點。
2.3 星表的預分類處理
利用自組織映射對恒星進行分類,需要構建有效的特征向量代表恒星,作為網絡的輸入。如圖2所示,采用徑向特征[25]來構造星的特征向量:以星表中每顆恒星為圓心,以固定的角距增量畫同心圓,將每顆星周圍的圓區域均分成N等分,根據區間內恒星的統計量構造N維的特征向量,與圖2所對應的10維特征向量為[0,0,1,2,1,2,1,2,0,1]。
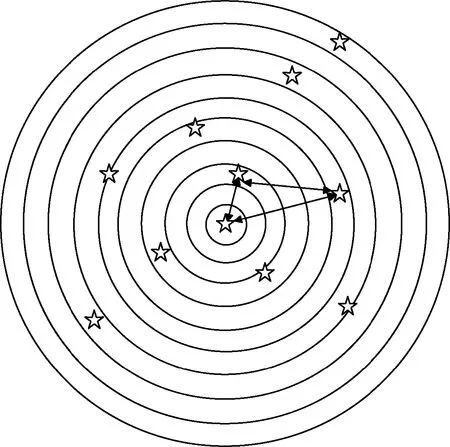
圖2 特征向量的構造方法Fig.2 Method of constructing feature vector
利用自組織映射網絡對4953顆恒星進行分類,將N維特征向量作為網絡輸入,如果選擇分成81類,訓練網絡的迭代次數設為700,則網絡將循環輸入4953顆星700次,訓練結束時,恒星被較均勻的分在81類中,如圖3所示,數值代表每一類的恒星統計量。
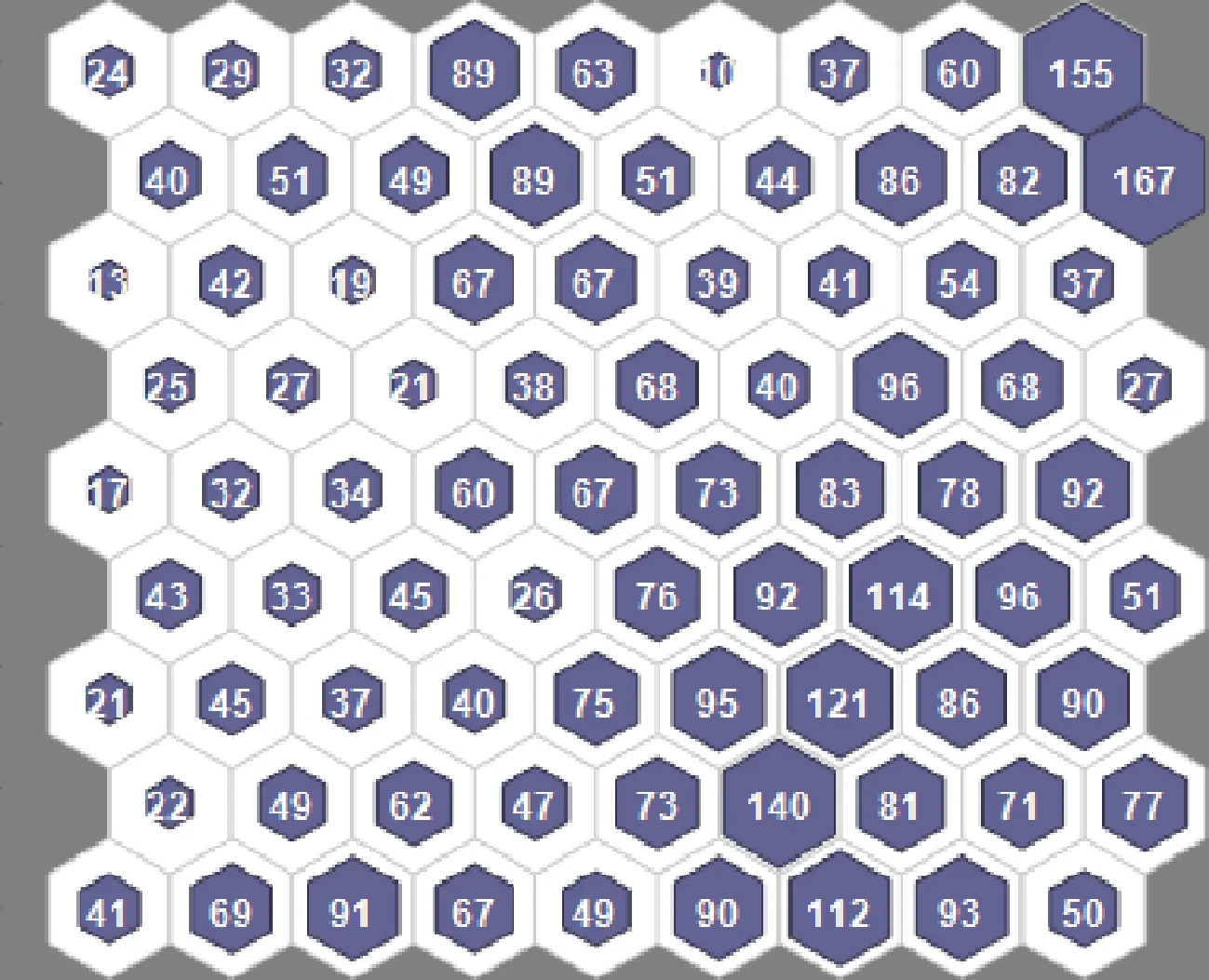
圖3 分類結果Fig.3 Result of the classification
表1列出了該分類結果下第1類別中部分恒星的特征向量,從表中可以看到,這些特征向量具有相似的數字變化規律,前幾列偏小,而第7列和第9列的數值較大,即網絡把具有相似特點的特征向量的恒星視為了一類。該方法所構造的特征向量反映了恒星周圍區域內星的分布特點,能有效的將具有相似鄰近星分布的星歸為一類。又由于特征向量的構造對恒星的位置誤差有一定的容忍性,使得該分類方法具有較好的魯棒性,當星點引入了位置誤差或者周圍星的數量發生變化時,網絡依然可以輸出其最相似類。
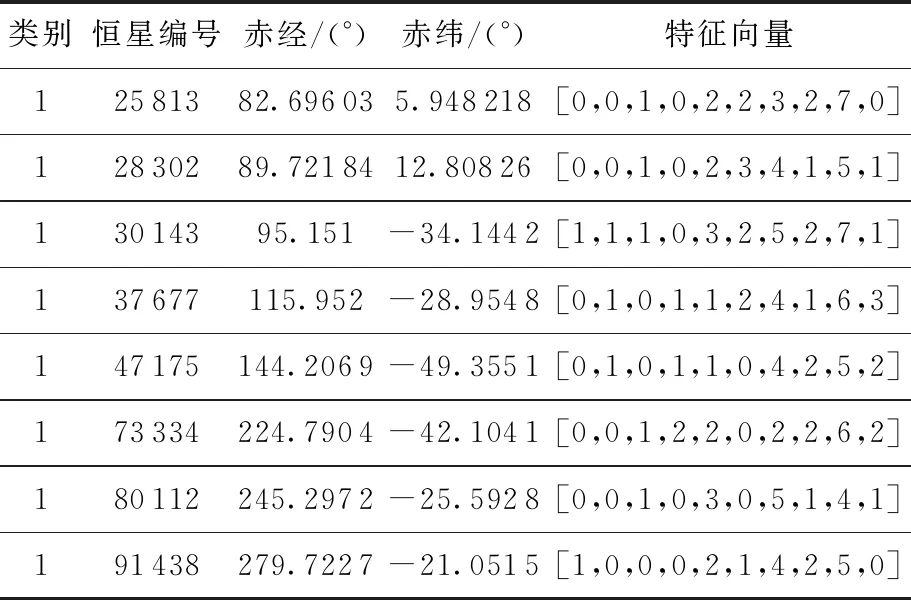
表1 第1類中部分信息
構建恒星特征向量的同時,在其鄰近星中挑選出最亮的或者最近的幾顆星,與該星組成多個三角形,將三顆星及三個角距值作為該三角形的信息,存儲到網絡識別類所對應的三角形庫中,形成81個三角形信息庫。
2.4 結合SOM網絡及三角形算法進行識別
基于已建好的星表和已訓練好的SOM網絡,星圖識別過程的步驟如圖4所示。

圖4 星圖識別的算法流程Fig.4 Flowchart of star pattern recognition algorithm
1)輸入待識別星,采用相同的特征提取方法,生成待識別星的特征向量并輸入已訓練好的自組織映射網絡,網絡輸出該星與所有類的相關度,選擇相關度最高的一類代表該星進行后面的識別匹配。
2)將待識別星與其鄰近區域內最亮或者最近的M顆星進行組合,生成M×(M-1)/2個三角形,按照星的亮度或者距離對三角形進行排序。
3)根據待識別星所屬的種類,在該類所對應的三角形庫中,應用三角形算法,依次匹配排好序的組合三角形。
4)當找到匹配三角形時,根據待識別星所匹配的恒星在星表中的信息,以及待識別星在實測星圖中坐標,生成星表中該星可形成的理論星圖,驗證理論星圖與實測星圖的差距,如果理論星圖中的恒星大部分都能在實測星圖中找到,且坐標誤差在允許的范圍內,則認為識別成功,若驗證不通過則繼續搜索匹配。
5)當搜索完待識別星的所有組合三角形,卻依然無法找到驗證成功的三角形時,則放棄該星的識別,回到1),選擇實測星圖中下一顆星進行識別。
6)若識別成功,則根據QUEST方法的姿態解算公式,計算出實測星圖所對應的姿態。
3 星圖模擬
3.1 星等到灰度的變換
為了驗證算法的可行性和性能,采用模擬星圖來進行試驗。隨機生成視軸指向,根據星表中恒星的赤經和赤緯,通過坐標變換,將視場中的恒星投影到15°×15°的成像平面上。不同星等之間的亮度呈現關系是:星等值每降低1,亮度變為前一星等的2.512倍。由于電腦仿真灰度值范圍有限僅為0~255,而81%的恒星星等值在4.5~6之間,為了盡可能呈現出更多恒星的亮度變化,將星等值為4.5的恒星灰度值設為255,6等星的灰度值則為64,進行星等和灰度值之間的轉化:
(8)
式中:m為恒星的星等值;g為灰度值。又考慮到試驗時恒星成像并沒有在像元正中心,像素灰度值一般小于g,為了更加突出暗星,進行相應的修改。由于67%的恒星星等值在5~6之間,將星等值為5的恒星灰度值設為255,6等星的灰度值則變為101.5,進行星等和灰度值之間的轉化:
(9)
3.2 點擴散
為了提高恒星的定位精度,實測星圖中星點并不是集中在一個像元內,而是被散焦到多個像元上,模擬該過程,將星點進行高斯點擴散,使之擴散到3×3的像元上,形成模擬星圖。星點圖像用高斯函數近似表示:
(10)
式中:g由式(9)得到;gi為像素i的灰度值;σ為光斑彌散半徑,取值為0.45;Δx為像素i中心點的橫坐標與星點橫坐標的差;Δy為像素i中心點的縱坐標與星點縱坐標的差。當m<5使g>255時,仍將該值代入式(10)中得到gi,當gi>255時,電腦將其視為255進行顯示。
3.2 噪聲模擬
星圖成像噪聲主要有兩方面[27]:一是器件在受到空間輻射時的散粒噪聲和器件本身的轉移噪聲、輸出噪聲、暗電流噪聲等,其中,暗電流噪聲和散粒噪聲相對來說影響較大;二是星空背景噪聲,包括雜散光、宇宙輻射、星云等。將背景噪聲看成10等星的亮度,即在原星圖上加上灰度值255/2.51210-5,用高斯白噪聲來代表器件的暗電流和散粒噪聲。基于此星圖進行仿真試驗,圖5為某視軸下模擬星圖的局部示意。
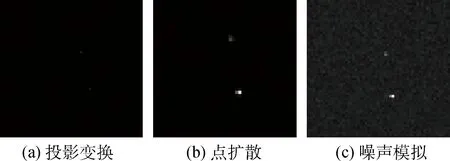
圖5 模擬星圖的局部示意Fig.5 Diagram of local simulated star map
4 算法的仿真結果
4.1 參數選擇對算法的影響
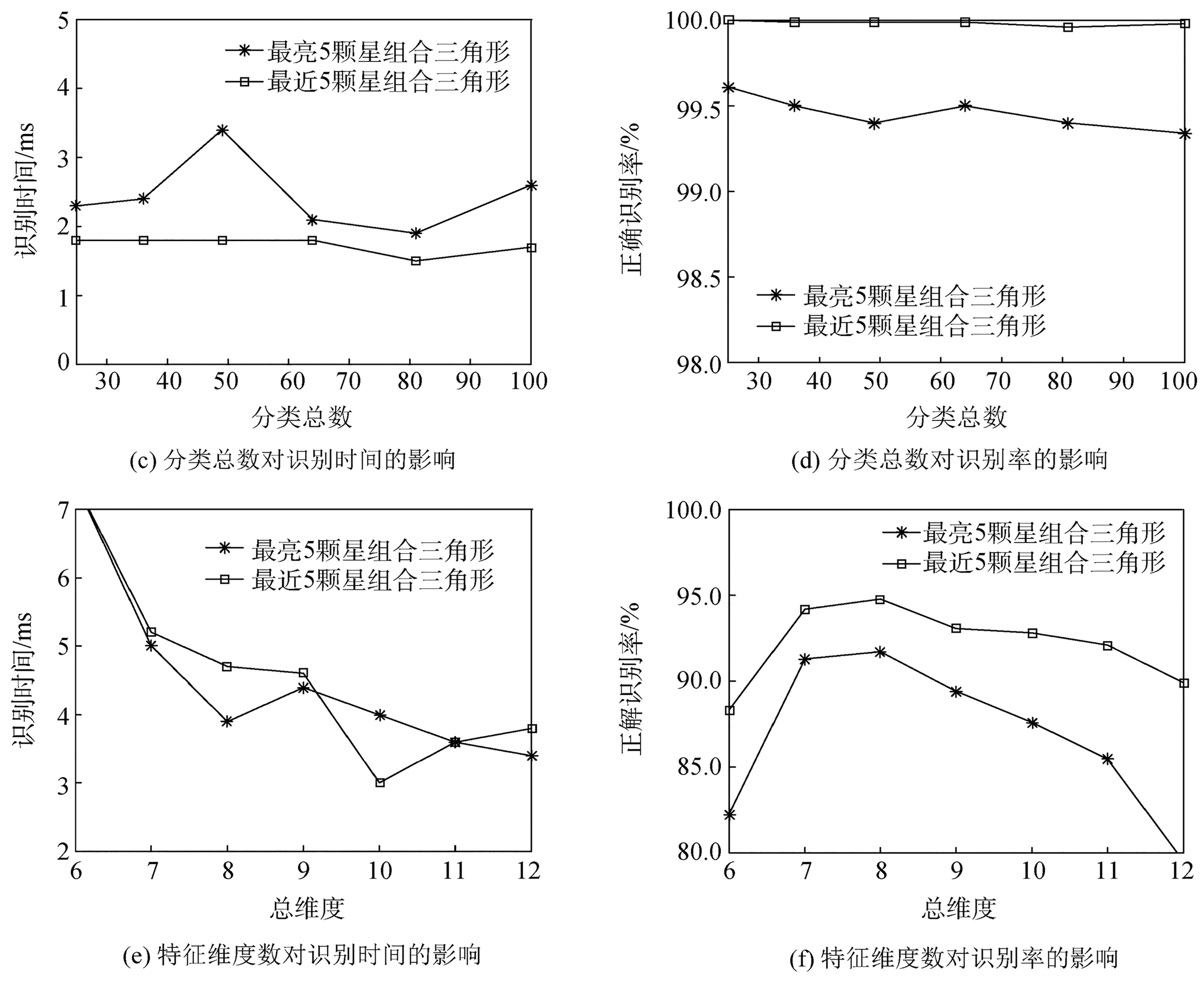
本文對于組合三角形的方法有兩種,一是選擇恒星周圍最亮的5顆星進行組合,二是選擇恒星周圍最近的5顆星進行組合,通過一系列的仿真比較了這兩種方法。其中,最亮或最近5顆星的選取范圍與最大同心圓的選取范圍一致,即在參與構建特征向量的周圍星中選取,當參與的周圍星不足5顆時,在該范圍內選取所有周圍星完成組合。探討實驗參數對識別效果的影響:更改訓練時的迭代次數、分類總數、特征向量維度,分別比較兩種三角形組合方法的識別效果。以下仿真試驗的模擬噪聲均選用均值為0.1的高斯白噪聲,同心圓角距差設為0.5°,每次試驗隨機生成10 000個視軸下的模擬星圖進行識別。圖6(a)、6(b)的分類總數為81,特征維度為10,噪聲為標準差0.017。圖6(c)、6(d)的迭代次數為500,特征維度為10,噪聲為標準差0.017。圖6(e)、6(f)的分類總數為81,迭代次數為500,同心圓角距差為0.5°,噪聲為標準差0.035。
如圖6(a)、6(b)所示,當SOM網絡的訓練迭代次數為200時即可達到很好的識別效果,增加訓練的迭代次數,識別效果變化不大。從圖6(c)、6(d)得到,分類總數對識別效果的影響較小,綜合識別時間及識別率的結果,當分類總數為60~80時,整體效果較好。圖6(e)、6(f)反映了特征維度的選擇對識別效果的影響,由于在標準差為0.017的噪聲下,系統識別率很高,特征維度對其影響不明顯,故增大了噪聲的干擾,選擇標準差為0.035的高斯白噪聲進行實驗。當保持同心圓的角距差0.5不變時,改變特征維度的同時也改變了恒星周圍星的選取范圍。當特征維度較小時,由于恒星周圍參與統計的鄰近星較少,特征向量包含的信息量不足以將恒星較好的分類,使得識別率降低;當維度較大時,若恒星離視場中央較遠,同心圓所包含的區域將不能在圖像上完整成像,導致統計量出現偏差,識別率降低。因此,對于15°×15°視場、6.0星等的星敏感器,可以選擇分類數為60~80,基于固定的角距差0.5°,適合構造7~10維的特征向量。
從以上試驗還可以看到,選取恒星鄰近5顆星組合三角形的識別率更高,識別時間更短。當選擇恒星鄰近最亮5顆星組合三角形時,由于6等星星庫中67%的恒星星等在5~6之間,所以當引入噪聲時,導致星等誤差較大,干擾了鄰近星的亮度排序,會得到錯誤的5顆亮星。
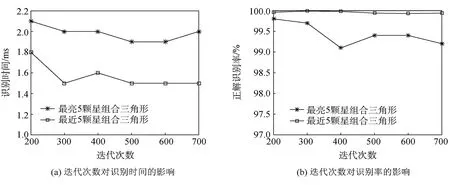
圖6 不同參數下的識別效果Fig.6 Recognition under different parameters
續圖6Fig.6 Continued
4.2 算法的抗噪性能
為了評估該星圖識別算法對噪聲的容忍性,由此來檢測識別系統的健壯性,改變高斯白噪聲的標準差,得到不同噪聲干擾下算法的識別效果。
觀察圖7不同噪聲下的識別效果,當系統噪聲增加時,系統識別率降低,識別時間變長,計算所得的視軸誤差增加,相比之下,鄰近5顆星的組合三角形對噪聲的容忍性更高。但是不論是哪一種方法,識別時間都低于5 ms,識別率在噪聲標準差為0.025時仍高達99%,該噪聲相當于在原星圖上隨機加上-10~60的灰度值。采用QUSET方法計算姿態,得到視軸誤差在角秒級。
4.3 對星等不確定性的容忍度
在星敏實際應用過程中,探測器的靈敏度會產生波動,實際觀測的最大星等值不一定嚴格地保持原設計值,如表2所示,改變星表的最大星等值,列出了對應的恒星總數,并將其與原設計星表進行對比,由于原設計星表65%恒星星等值在5~6之間,當最大星等值在6附近發生較小改變時,星表恒星數量即發生很大的變化。

表2 不同星表的恒星數量
本算法的預分類識別對恒星分布的依賴性較強,為了評估算法的適用性,在保持匹配星表最大星等為6的情況下,改變仿真星表的最大星等值,即模擬探測器的靈敏度發生波動的情況。
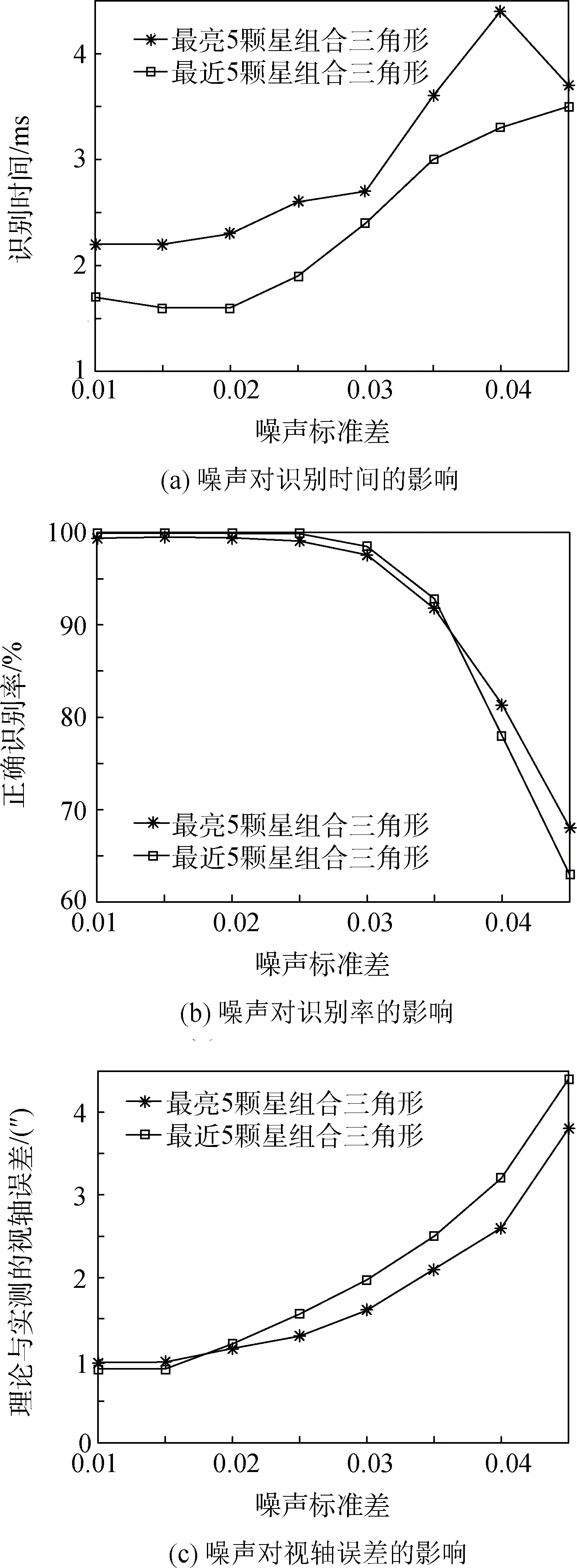
圖7 不同噪聲下的識別效果Fig.7 Recognition under different noise
如圖8所示,保持原設計星表不變的情況下進行預分類、建立三角形庫,改變仿真圖像所用到的星表最大星等值,并隨機生成視軸指向進行星圖模擬,可以看到,增大最大星等值的改變量時,算法的識別率隨之下降,而識別時間也隨之增加。
為了改善因為探測器靈敏度改變所造成的算法識別率的下降,將原算法中“在最相似一類中進行三角形匹配”改進為“在最相似五類中進行三角形匹配”,即擴大了三角形的搜索范圍,同時也增加了對星等分布不確定性的容忍度。如圖9為改進算法后相應的識別率及識別時間。
從圖9可以看到,在將匹配范圍擴大之后,算法的識別率得到了很大程度的提高。對比圖8(b)和圖9(b),由于三角形搜索范圍的增大,導致搜索時間變長,但是依然可以實現快速識別。
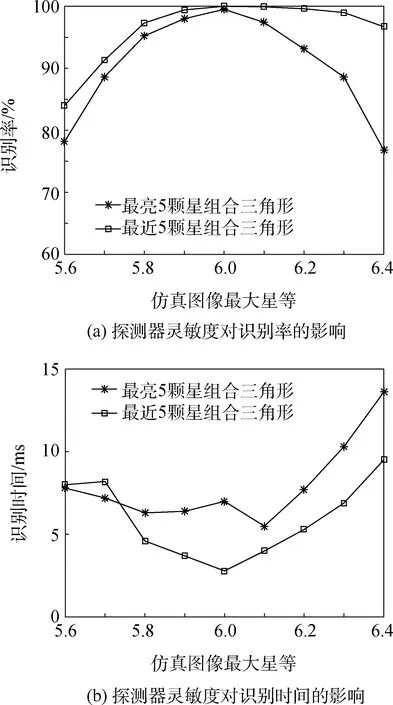
圖8 不同最大星等值下的識別效果Fig.8 Recognition under different maximum star magnitudes
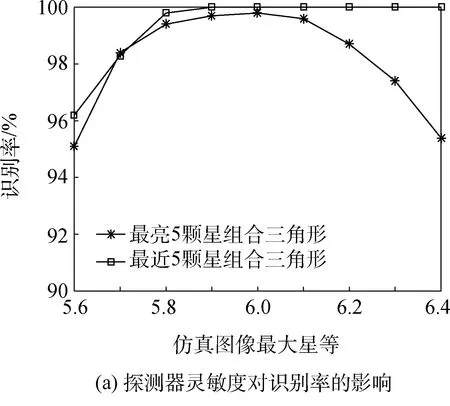
圖9 改進后不同最大星等值下的識別效果Fig.9 Recognition under different maximum star magnitudes after improvement

續圖9Fig.9 Continued
5 結束語
本文提出了一種結合SOM網絡及三角形算法的星圖識別方法,分析比較了迭代次數、分類總數、特征向量維度對識別時間及識別率的影響,并對組合三角形的兩種選取方法進行了比較。相對于經典的三角形算法,本算法:1)搜索范圍小、識別速度快,由于本文通過SOM網絡對星表進行了預分類,每類的恒星較少,如分成81類時每類包含恒星不超過170顆,應用三角形算法時,搜索更快,系統識別時間平均在5 ms內。2)抗噪性能好,由于SOM網絡良好的分類能力,當圖像引入噪聲帶來位置和星等誤差時,系統依然能較好的對恒星進行分類并識別出其對應的導航星,在噪聲標準差為0.025時仍可達到99%的識別率。3)由于算法原理依賴于恒星的分布特點,對探測器的靈敏度改變較為敏感,在進行算法改進后,識別率得到了很大的提高,而相應產生的時間代價依然可以接受。