自動云藥房系統中進藥系統的設計
2018-08-09 10:02:08汪麗平張弛鄭長坤李星輝胡敏達汪豐
中國醫療設備 2018年8期
汪麗平,張弛,鄭長坤,李星輝,胡敏達,汪豐
東南大學 a.生物科學與醫學工程學院;b.生物醫學工程實驗教學中心,江蘇 南京 210096
引言
傳統的藥房具有經營時間有限、占地面積很大、耗費人力資源等局限性。隨著電子商務[1]、自助服務系統的飛速發展,傳統的藥房已不能滿足人們的所有期望,自動藥房系統[2-4]的概念應用而生。自動藥房系統的優勢不僅僅在于降低成本,更在于其安全性,便捷性,可獲得性和管理的精準方便。
目前正在研發的自動云藥房系統是以互聯網為媒介,可實現線上線下購藥、線下自動取藥以及在線咨詢醫師的一個系統項目。此系統的線下藥房現已配備專用直角坐標機器人可實現自助發藥的功能,但是進藥是通過人工一盒盒掃描藥品條形碼,再將藥品放置于藥房倉儲的進藥傳送帶上,然后直角坐標機器人完成后面的進藥操作。本文主要是為線下藥房設計并實現了一套可以批量的全自動進藥的系統,替代手動掃描進藥的過程。系統的工作過程為:封裝好的大型進藥箱子里裝了藥品,將其放置于規定的進藥區域,控制攝像頭從正上方拍攝到箱子中藥品的圖像之后利用圖像處理相關技術計算并返回某一盒藥品三維坐標,然后控制機械臂運動到該藥品的坐標位置,控制吸盤吸取藥品,接著控制機械手臂將藥品移動到條形碼掃描模塊,在此模塊控制三個攝像頭同步拍攝圖片,并對圖片進行預處理、識別條形碼號等操作,將識別出的條形碼號作為結果返回給已有的自動云藥房系統的控制單元,最后將藥品放置于傳送帶的指定位置上,循環往復。本系統采用機電控制系統和軟件控制系統相結合的方式,為自動藥房的全自動進藥提供了有效的解決方案。
1 系統硬件設計
系統硬件主要劃分為4個模塊(圖1):藥品定位模塊、條形碼識別模塊、機械手臂及其運動控制模塊、計算機。

圖1 自動進藥系統硬件模塊
藥品定位模塊有一個長40 cm、寬30 cm、高30 cm的裝了藥品的紙箱子,一個1200萬像素的USB攝像頭,光源以及支架。為了便于藥品識別,箱子底部采用黑色不反光的材質。攝像頭位于藥品箱子的正上方,使拍攝范圍正好覆蓋藥品箱子底面的范圍。攝像頭通過USB連接到計算機。
條形碼識別模塊有3個1200萬像素的USB攝像頭、支架、光源以及正下方一個防護網。三個攝像頭分別固定于上面、側面、底面,用于從多個面同步識別藥品的條形碼,并且都通過USB連接到計算機上。這里側面一個攝像頭無法識別藥品4個側面,所以在本模塊執行時,藥品會在水平面內緩慢轉動,使得側面盡可能多地被拍攝到。當超時未識別出條形碼號時,斷開電磁閥,將藥品置于防護網上。
機械臂及其運動控制模塊主要包括:運動控制板、X、Y、Z三軸的電機、電機驅動板、供電電源、電磁閥、真空泵、吸盤、直線滑臺、旋轉電機、支架等。其中直線滑臺、旋轉電機和吸盤組合形成機械臂。運動控制板通過USB轉DB9轉接線連接至計算機,它控制電機的運動、電磁閥的通斷;X、Y、Z三軸的電機轉動,從而帶動直線滑臺上這3個方向的滑塊運動相應的距離,其中Z軸電機配有斷電剎車。根據系統的實際需求,設計的直線滑臺的運動范圍為:X軸70 cm、Y軸70 cm、Z軸35 cm,組合方式,見圖2。直線滑臺搭建好之后放于支架上,機械手臂是通過與直線滑臺Z軸滑塊相連接的一段金屬結構將旋轉電機和吸盤組合在一起。吸取與放開藥品是通過真空泵、電磁閥、吸盤組合實現的。真空泵通電之后產生負壓,通過氣管連接至電磁閥,電磁閥通過運動控制板上的電路控制通斷。當電磁閥連通時,負壓通過電磁閥,吸盤吸取藥品;電磁閥關閉時,吸盤放開藥品。吸盤配有壓力傳感裝置,當接觸到藥盒表面產生壓力時,停止進一步向下運動,以免將藥盒壓變形。
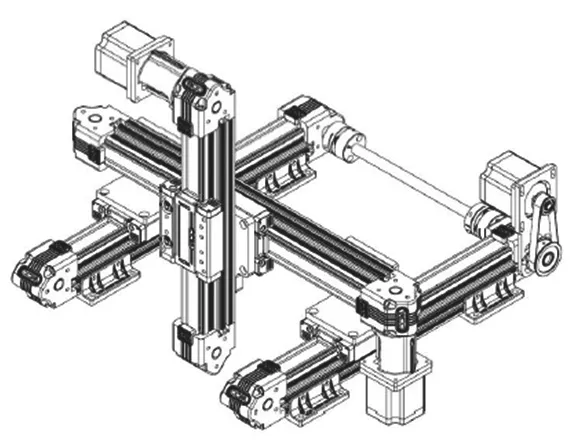
圖2 直線滑臺組合方式
2 系統軟件設計
系統軟件架構主要分成業務邏輯層、接口層和底層(圖 3)。
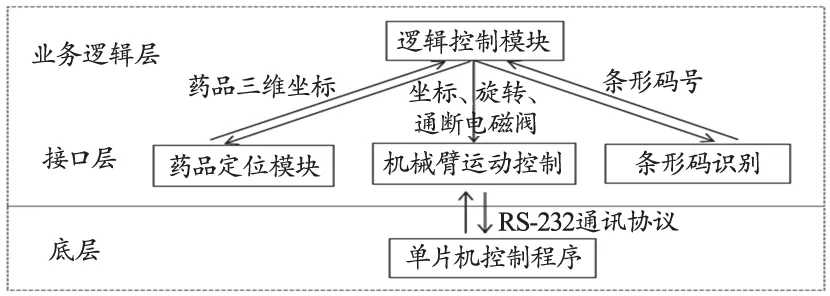
圖3 系統軟件架構
2.1 業務邏輯層
業務邏輯層根據系統的功能需求和流程圖(圖4)對各個部分進行邏輯控制,實現各個模塊合理調配。系統工作流程為:首先系統上電,當工作人員將藥品箱子放置于指定的位置時,點擊啟動系統;然后系統自動完成后面的操作,系統初始化,執行機械手臂復位、攝像頭開啟等;接著,藥品定位模塊獲取某盒藥品的三維坐標;接下來機械手臂運動到此藥品的坐標位置,并通過吸盤吸取藥品;然后運動到條形碼識別模塊進行條形碼識別,一旦識別出條形碼,停止繼續拍攝圖片,旋轉電機停止運動,將識別出的條形碼作為結果反饋給移動云藥房系統的控制單元。然后系統恢復初始狀態,繼續新一輪的操作,直至箱子中的藥品已經全部取完,結束系統操作。當出現各種異常發出警報,如吸取藥品失敗等。
2.2 接口層
接口層實現各個模塊的功能。藥品定位模塊,驅動攝像頭獲取箱子中藥品的圖片,然后利用圖像處理的方法識別出某盒藥品的三維坐標。首先,我們需要得到圖片中藥品的二維坐標,設計算法思路需要考慮的因素有:① 項目中的藥品盒子均為長方體,可以通過矩形特征進行識別,相關研究介紹了幾種常見的矩形識別的方法[5-8];② 藥品顏色鮮艷且邊界清晰,顏色各異,可以加入顏色特征;③ 重復識別的情況,即當多個藥品拼成一個大的矩形,此大矩形會被錯誤當做一盒藥品;④ 同一盒藥品會因為有多種顏色被識別成多盒藥品;⑤ 光照不均產生的陰影;⑥ 藥品放置無序、有序等。當箱子為空時,設置超時判斷。根據以上幾點因素,設計出的藥品識別的算法流程,見圖5。首先進行輪廓檢測[9],輸入為灰度圖像;接著進行多邊形逼近;然后進行矩形約束,約束條件有:凸四邊形、面積、每個內角度數(接近直角);接下來去除重復的矩形;最后計算出面積最大的矩形并返回其中心點坐標位置。計算出圖片中藥品的二維坐標后,我們需要經過對應比例的換算關系實際系統中的藥品的X、Y軸坐標。最后,設定Z軸坐標。由于已知箱子尺寸以及它在系統的坐標位置,并且機械手臂上的吸盤裝有壓力傳感裝置,觸及到藥品表面時,停止Z軸的運動,所以這里將藥品的Z軸坐標設定為0。

圖4 系統功能流程圖

圖5 藥品定位算法流程
條形碼識別模塊控制3個攝像頭從上面、側面和底面進行同步拍攝圖片并識別條形碼。拍攝到的圖片條形碼會存在模糊、傾斜、光照不均、面積小等問題。所以需要通過圖像預處理的方法對圖像進行去燥、條形碼定位和校正。然后識別圖片中的條形碼號。設計出的算法流程,見圖6。首先,進行圖像灰度化處理;然后利用中值濾波去除噪聲[10];對于光照不均采用直方圖均衡化[11]進行處理;去模糊采用的是黃認真[12]提出的一種QR碼識別圖像模糊預處理算法;定位與校正采用劉松等[13]提出了一種基于形態學的條形碼定位算法以及計算量較小、但效果較好的條形碼校正算法。最后利用開源的ZXing庫識別條形碼號[14]。

圖6 條形碼識別算法流程
機械臂運動控制模塊實現機械臂對藥品的抓取、放置、旋轉、移動到指定位置等操作。它是相對于運動控制板的上位機程序,根據制定好的通訊協議,與下位機進行通訊,主要實現的功能有7個:系統初始化、運動到指定坐標位置、電磁閥通電、電磁閥斷電、旋轉電機轉動、旋轉電機停止轉動、復位。
2.3 底層
這里指的是硬件中機械臂及其控制模塊的運動控制板中單片機的下位機程序,與上位機進行通訊,接收指令,反饋執行結果。
3 實現方法及結果
3.1 實現方法
機械臂及其運動控制模塊的運動控制板使用的單片機是STM32F103C8T6,留有供電電源接口、DB9接口、X、Y、Z三個軸電機接口、旋轉電機接口、電磁閥通斷控制接口等。各個模塊對應的分布,見圖7。電路板實物圖,見圖8。

圖7 運動控制板各接口分布圖
圖8 運動控制板實物圖
X、Y、Z三軸的電機均采用57步進電機,其中Z軸電機配有斷電剎車。對于旋轉電機,因其負載較小,所以采用的是35兩相步進電機。X、Y、Z三軸的電機驅動采用的是TB6600步進電機控制器,旋轉電機通過電路控制。供電電源將220 V的交流電壓轉換成運動控制板所需要的24 V直流電壓。真空泵產生的負壓小于-0.082 MPa,系統中的吸盤成功吸取藥品,見圖9。硬件系統各模塊實物圖,見圖10。

圖9 吸盤成功吸取藥盒

圖10 系統硬件實物圖
整個系統軟件在計算機上搭建,使用的主程序語言是python 2.7、主開發環境為PyCharm(單片機控制程序通過C語言實現,開發環境是IAR)。藥品定位算法和條形碼識別算法實現,用到了OpenCV[15-16]的庫以及其它的一些圖像識別的技術。條形碼識別還調用了開源的ZXing條形碼識別庫。
3.2 結果討論
為了驗證系統的運行效果,這里做了一些模擬實驗。實驗條件與步驟:① 準備100盒品種繁多的藥品隨機放置于藥品箱子中;② 系統通電,完成10次進藥操作,記錄每次實驗的時間和漏檢的盒數;③ 人工同樣進行10次進藥操作并記錄結果。實驗結果表明(表1),由于系統需要經過藥品定位、機械手臂搬運藥品、條形碼掃描等過程,人工操作是對準條形碼掃描、放置。完成100盒藥品的平均速度分別為:系統為11 s/盒;人工為5 s/盒。但是可以看出系統每次試驗的時間穩定在1100 s左右,人工操作的每次實驗時間有增多的趨勢。此外,24 h內系統的運行時間為24 h、人工操作時間至多為8 h。所以,綜合各項因素初步得知系統雖然每次的進藥時間要比人工操作的長,但因可持續穩定工作,計算可得24 h內綜合進藥量比人工操作大,可替代人工進藥。系統仍然會存在漏檢,漏檢盒數是指未定位出的藥品(即每次實驗結束,箱子中剩余的藥品)、未識別出條形碼號的藥品(防護網上的藥品)數量。漏檢率是指每次實驗漏檢盒數所占的比例,為6%左右。其主要原因是條形碼識別部分藥品運動以及條形碼位置未知,給識別帶來一定的困難,仍需進一步改進算法,提高準確率。系統的成本主要是搭建系統的硬件部分的費用,系統運行過程中所需的成本極少,例如:耗電、偶爾進行維護。而傳統的方法主要是人力成本,成本與進藥量成正比。所以從藥房長期的進藥目標來看,自動進藥系統的成本較低。
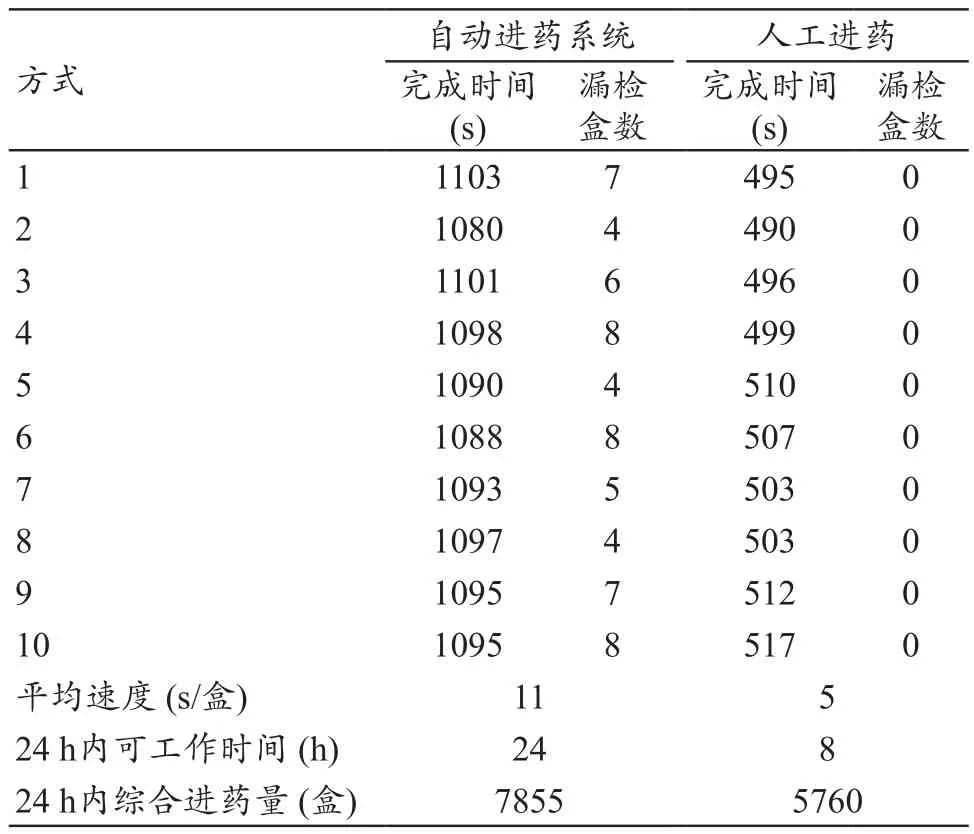
表1 模擬實驗結果
本系統設計針對自動云藥房系統的全自動進藥的功能需求,具有輕量、低成本、高效的特點,并且可以替代人工掃描上藥實現24 h進藥,管理方便。針對藥品有序、無序、單種、多種等情況均可進行識別、抓取。優化的條形碼圖像預處理算法以及ZXing庫的使用使得條形碼識別率較理想,藥品旋轉以及三個攝像頭同步拍攝識別使得藥品的各個面均可拍到。利用步進電機可以調整運動精度,三維直線滑臺的設計使得運動范圍可控、穩定。但是本系統仍存在需要進一步改進的地方:① 每一次只能抓取一盒藥品,后面可以考慮改善系統,每次抓取多盒藥品進行掃描、運送等操作;② 存在藥品漏檢的情況,后面繼續改善算法,進一步提高效率。此外,針對不同的功能需求可以加以調整,除了自動進藥,對于其他商品的進貨以及快遞自動分揀等也同樣適用,可進一步挖掘實用價值。
4 結論
相比較傳統的A字機、立式藥品分揀機、斜槽式自動分揀機[17],以及德國ROWA公司的自動化藥房應用的上藥輸送機,本系統體積小,成本低,操作簡便。其中圖像定位技術,可自動識別藥品的坐標位置。此外,系統的條形碼自動識別功能,可覆蓋藥品的6個面,無需預先知道條碼在哪一個面。根據藥品的形狀體積重量特征,采用吸盤吸取藥品的方式大大降低了成本。為自動藥云房系統的全自動進藥提供了很好的解決方案。
猜你喜歡
中國合理用藥探索(2022年1期)2022-11-26 00:22:32
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生優秀作文(低年級)(2018年6期)2018-05-19 01:54:28
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國衛生(2016年5期)2016-11-12 13:25:28
中國衛生(2015年9期)2015-11-10 03:11:14
