強風下高速列車滑膜自適應魯棒H控制方法
2018-07-20 09:05:26李德倉孟建軍胥如迅
鐵道學報 2018年7期
李德倉, 孟建軍, 胥如迅, 銀 銘
(1. 蘭州交通大學 機電工程學院,甘肅 蘭州 730070; 2. 蘭州交通大學 機電技術研究所,甘肅 蘭州 730070;3. 甘肅省物流及運輸裝備信息化工程技術研究中心, 甘肅 蘭州 730070)
強風是威脅高速列車運行安全的復雜環境之一,我國沿海線夏季臺風、蘭新二線春秋季風都嚴重威脅到高速列車的運營安全。強風作用于列車時產生的巨大氣動力和氣動轉矩,將使列車產生氣動阻力、側向力和搖頭力[1],若風速和車速同時達到各自的界定速度,列車運行姿態將發生嚴重變化,最終可能導致列車延誤、脫軌,甚至傾覆和人員傷亡事故。近幾年,由強風造成正在運行的列車傾覆事故在許多國家發生。例如:2004年在美國由強風造成鐵路貨車發生的傾覆事故;2005年日本新干線特快列車“稻穗14號”在行駛過程中被強風吹翻;2007年從烏魯木齊開往阿克蘇的5806次旅客列車在南疆線上距離吐魯番70 km處突遇13級大風,造成列車9至19節車輛脫軌,事故造成多人傷亡和重大經濟損失[2]。因此,針對強風條件下列車運行安全性問題,許多學者已經做了大量研究[3-7]。但這些研究成果僅提供了大風環境下列車運行的安全指導工作,如確定了不同風速環境下的列車臨界運行速度、惡劣風環境下鐵路安全行車措施、設計合理的列車外形、設置擋風墻、建立鐵路大風監測預警與行車指揮系統等,而對大風環境下列車的安全運行速度主動跟蹤控制較少涉及。
目前高速列車通過風區環境時,對其速度的控制主要依靠駕駛員參考列車自動防護ATP(Automatic Train Protection)曲線手動完成,完全手動操作以實現對列車運行速度的控制,這種“人控”操作方式依靠于駕駛員的操作經驗和技能。因此實現大風環境下高速列車的速度自動跟蹤控制以及高速列車的ATO控制是列車運行控制系統未來的發展趨勢[8]。而ATO的關鍵技術是依靠事先給定的目標速度曲線,由控制系統實時自動調整列車的運行速度,實現高速列車實際運行速度對給定目標速度的精確跟蹤[9],達到列車安全運行的目的。在強風環境下要完成該目標,最主要的任務是高速列車運行過程建模與設計高精度速度跟蹤控制器及控制算法。目前許多控制策略被應用到高速列車ATO速度跟蹤控制中,如滑模PID組合控制[10]、模糊邏輯控制[11]、模糊廣義預測控制[12]、魯棒自適應控制[13]、H2/H∞混合控制[14]等,而這些控制策略對于強風環境下運行的高速列車ATO速度跟蹤控制的有效性還待進一步研究和驗證。
文獻[15]針對飛行器姿態控制過程中,存在的一類不確定非線性系統參數變化與干擾問題,提出一種滑模自適應方法。同時在控制系統中加入魯棒控制,使各種干擾達到最小,滑模控制消除了系統跟蹤誤差,使飛行器姿態跟蹤控制效果達到最優。滑模自適應魯棒控制SMARC(Sliding Mode Adaptive Robust Control)可以有效克服過程中的不確定性和非線性,并有較強的抗干擾能力,適用于強風環境下高速列車ATO系統控制。因此本文采用滑模自適應魯棒控制方法設計控制器,對強風環境下高速列車ATO進行控制。在控制過程中采用自適應方法實現漸近穩定的滑模控制,再結合魯棒H∞控制抑制滑膜控制過程狀態非線性變結構抖振問題,也使控制器具有較強的抗干擾能力,從而實現強風環境下高速列車實際運行速度對給定目標速度的高精度跟蹤控制。
1 高速列車運行過程模型
高速列車運行過程是一個具有多輸入多輸出、一類強耦合、強干擾、高度非線性等復雜的動力學系統。高速列車運行過程的控制也是典型的多目標、非線性、復雜的不確定性系統。其核心問題是針對不同的運行環境設計高精度速度跟蹤控制器,實時自動控制列車的牽引力/制動力,實現列車實際運行速度對給定目標速度的精確跟蹤。要實現此目標,必須先對列車運行過程進行動力學分析和數學描述。高速列車動力學方程為
( 1 )
式中:v為列車運行速度;χ為加速度系數;F為列車受到的合力;μ為列車牽引或制動力,且為系統控制輸入量;fr為列車受到的基本阻力;a0為列車的滾動機械阻力系數;a1為列車的其他機械阻力系數;a2為列車受到的外部空氣阻力系數。作為列車基本阻力主要構成的氣動阻力與列車車體形狀、運行環境風速大小、風向有直接關系[16]。列車運行過程中的阻力系數a0、a1、a2均與列車運行環境密切相關,特別是在強風環境下,且很難得到其精確值,所以列車的基本阻力具有高度不確定性。由式( 1 )也可以看出,列車所受空氣阻力以速度的平方增加。因此希望找到合理有效的控制策略,以解決高速列車在強風環境下運行速度精確跟蹤控制問題。由式( 1 )可以得到高速列車運行速度的微分方程為
( 2 )
2 強風環境下高速列車空氣阻力
2.1 無風環境下列車空氣阻力分析
由式( 1 )可知,a2為列車外部空氣阻力系數,則定義a2為
( 3 )
無風時,高速列車受到的空氣阻力fw可表示為
( 4 )
2.2 大風對列車空氣阻力作用的分析
列車在大風環境中運行時,作用于列車上的強風風向有兩種情況,即:強風風向與列車運行方向平行和強風風向與列車運行方向呈一定角度[17]。
2.2.1風向與列車運行方向平行時風速對列車的空氣阻力
強風風向與高速列車平行時有兩種情況,即強風風向與列車運行方向相同(順風環境)和相反(逆風環境),則列車運行速度與大風風速的合速度為
vh=v±vw
( 5 )
式中:vh為合速度;vw為風速, m/s。當風向與列車運行方向相同時,式( 5 )中取“-”;當風向與列車運行方向相反時,取“+”。
第一種情況:當風向與列車運行方向相同(順風環境)時,由式( 5 )可知,此時合成速度vh=v-vw。
當v≥vw時,由合成速度vh=v-vw替換式( 4 )中的列車速度v,得到順風環境下列車空氣阻力為
( 6 )
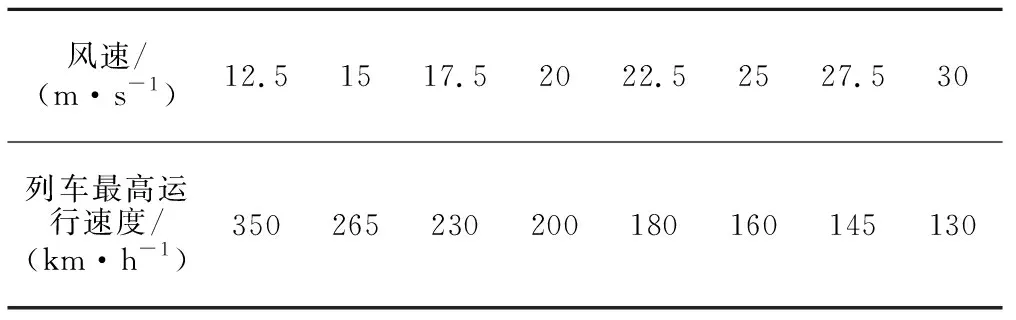
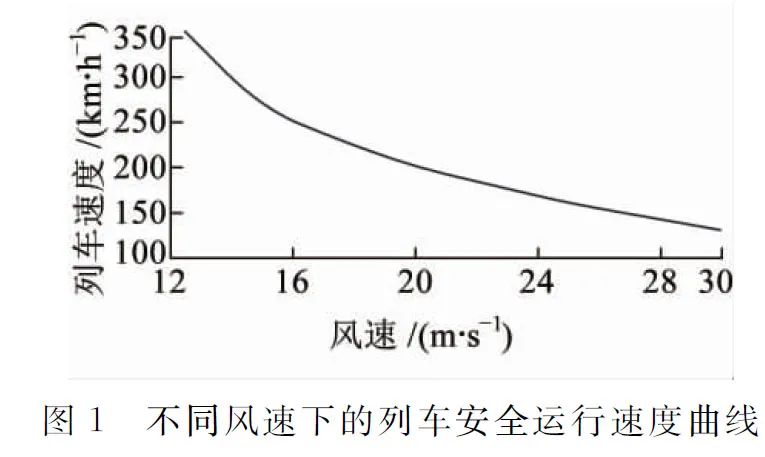
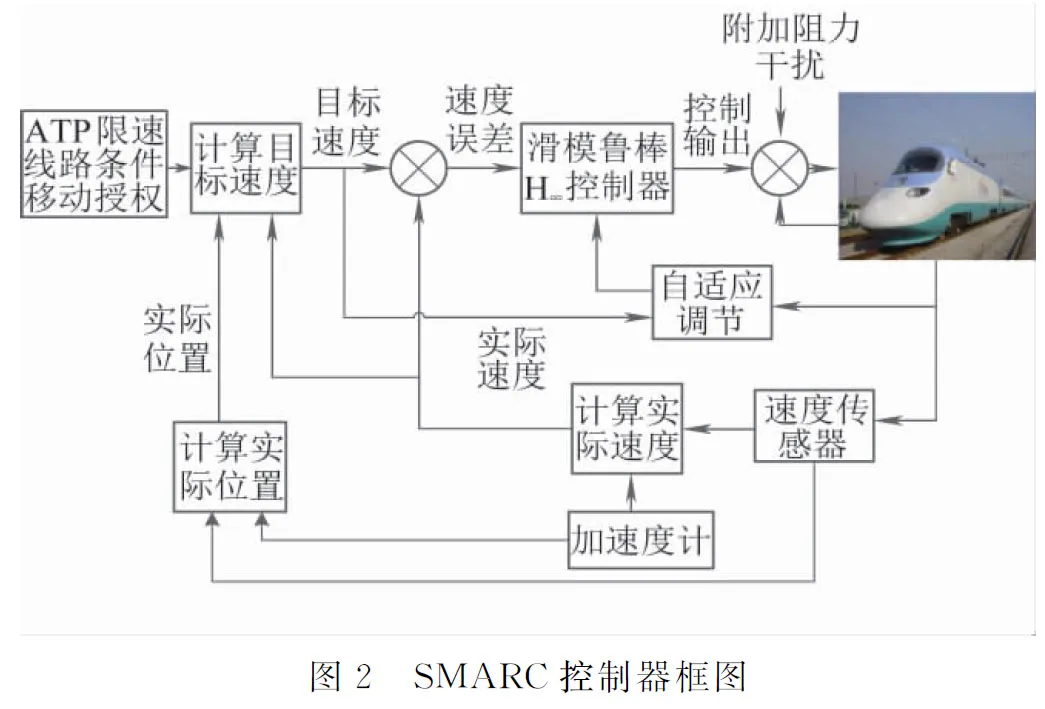
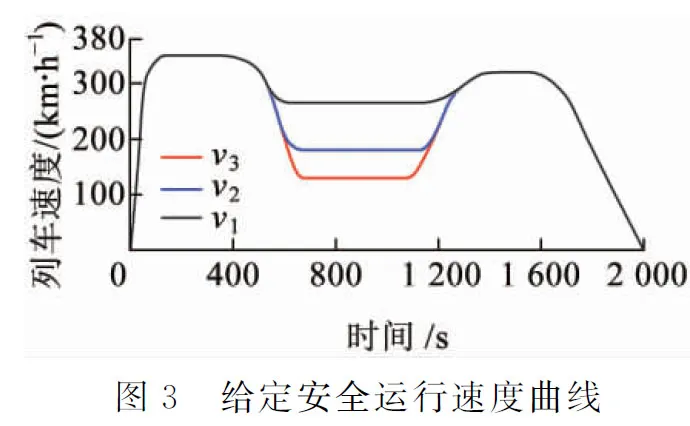
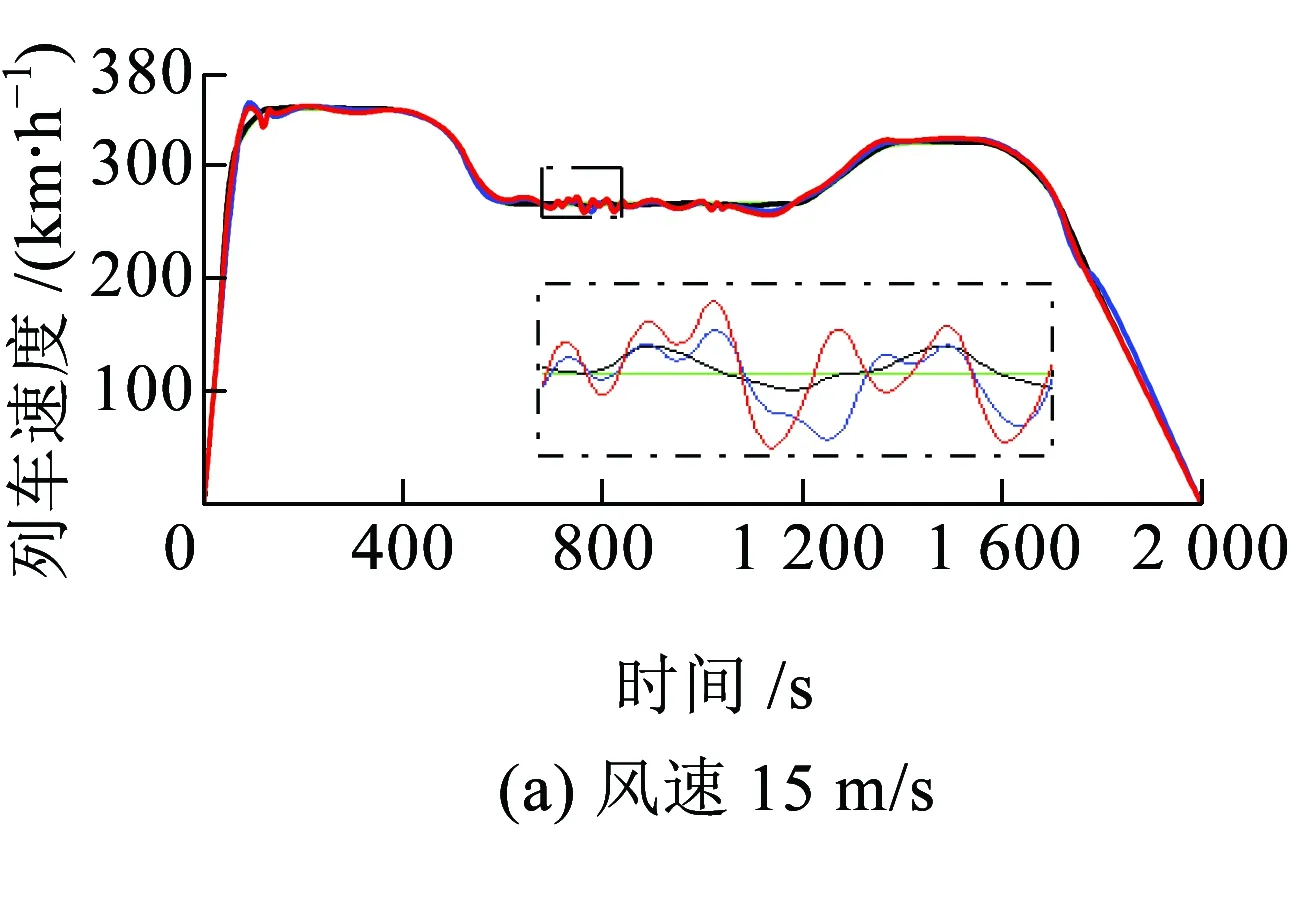
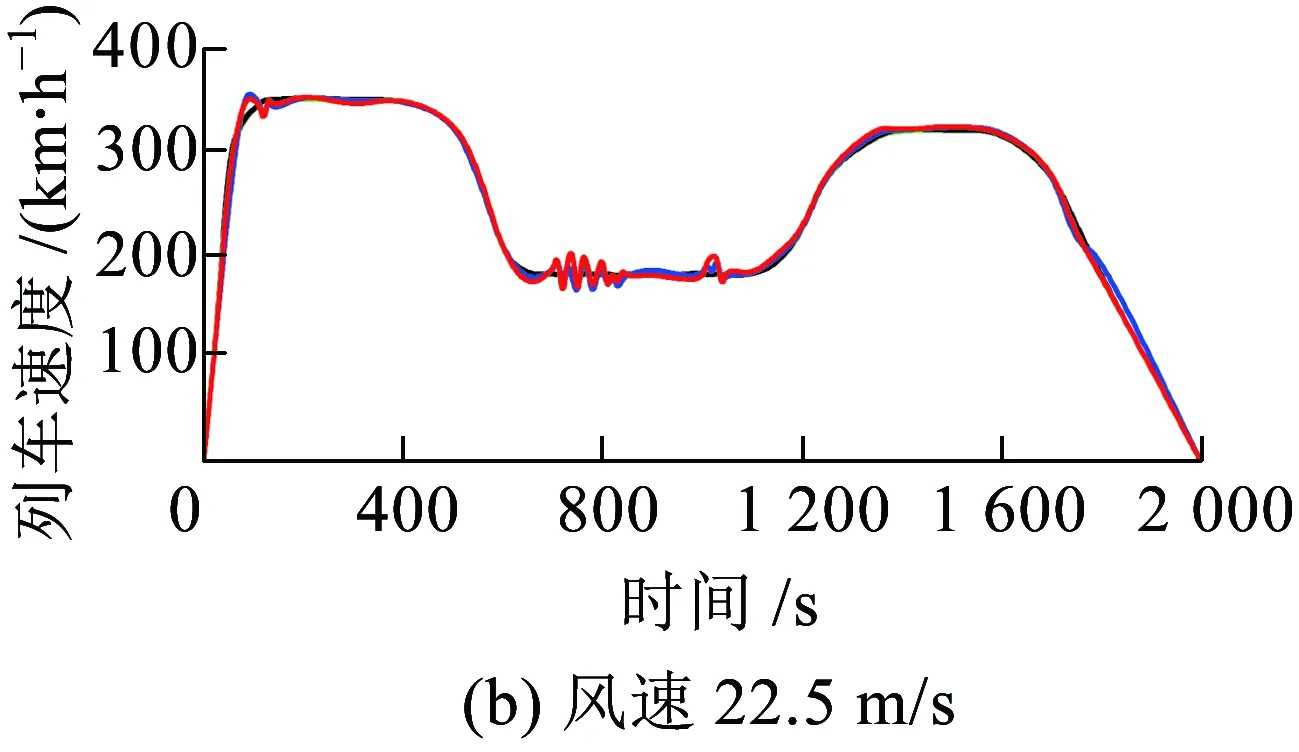
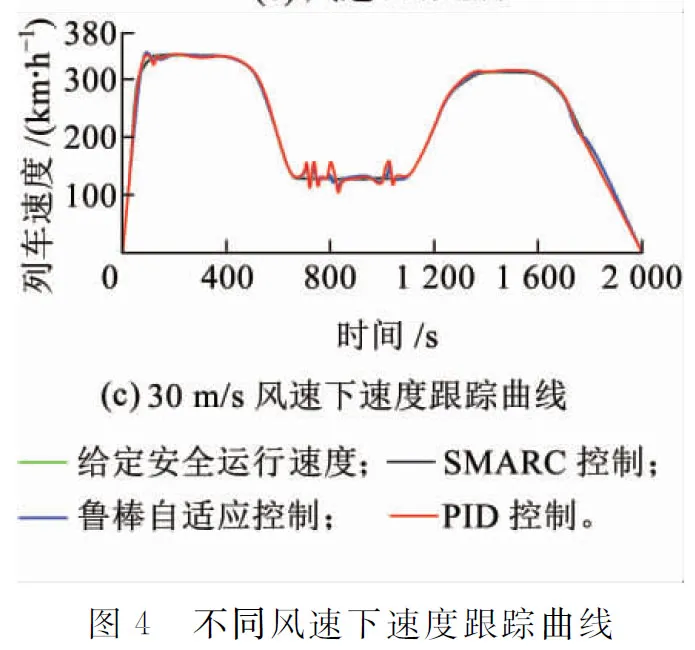
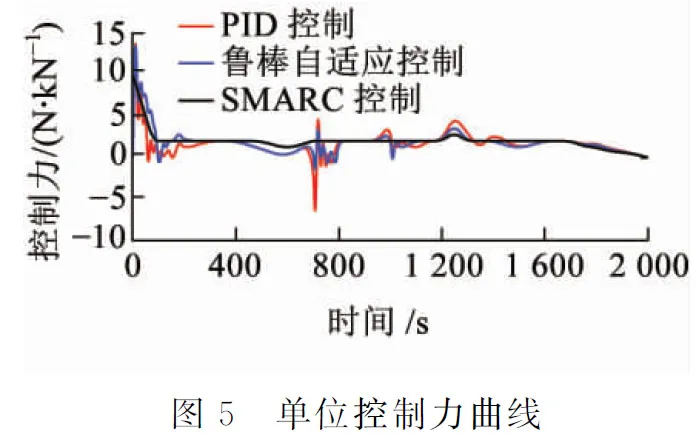
當v ( 7 ) 由式( 6 )可知,當大風風向與列車運行方向相同時,因強風致使列車空氣阻力降低,列車所受空氣阻力fw以合成速度vh的平方減少。特別是當v=vw時,理論上此時高速列車不存在空氣阻力,即此時高速列車運行在無空氣阻力的環境中。 由式( 7 )可知,當列車運行速度小于風速時,列車受到的空氣阻力為負,理論上此時強風助推列車向前運動。 第二種情況:當風向與列車運行方向相反(逆風環境)時,由式( 5 )可知,此時合成速度vh=v+vw,由其替換式( 4 )中的列車速度v,得到逆風環境下列車空氣阻力為 ( 8 ) 由式( 8 )可知,當大風風向與列車運行方向相反時,因大風致使列車空氣阻力增加,列車所受空氣阻力fw以合成速度vh的平方增大。 2.2.2風向與列車運行方向呈一定角度時風速對列車的空氣阻力 當風向與列車運行方向呈一定角度時,列車運行速度與風速的合速度為 ( 9 ) 式中:α為風向角,且0°≤α<180°;β為側偏角。 當風向與列車運行方向呈一定角度時,由式( 9 )可知,高速列車所受空氣阻力fw的計算比較復雜,本文不再贅述。當風向角0°≤α<60°時,列車所受空氣阻力fw以風向角α的平方增大;當α≈60°時,列車所受空氣阻力達到最大。當風向角60°<α<180°時,列車所受空氣阻力與風向角呈正弦曲線關系。需要特別說明的是,本文所述風速均指最大脈動風速。 強風下列車高速行駛時,大風會影響列車行駛的平穩性,隨著列車車速的提高,這種影響會隨之增強。風速越大,所擁有的激擾能量就越大,引起的列車姿態變化會越發明顯。若不加控制,列車將會產生蛇行運動,嚴重時將失穩顛覆。控制目標就是對列車運行速度加以限制,以抑制列車蛇行運動對行車平穩性及安全性的影響。 強風條件下,要確定列車在曲線上的最高安全運行速度較為復雜和困難,因為此時列車的運行安全性不僅與風速和風向有直接關系,還與曲線參數設置有關。因此,本文按照文獻[4]和文獻[18]研究得到的列車最高安全運行速度值,再綜合考慮各種因素后,給出了不同風速下,列車僅在直線軌道上行駛時的安全運行速度值,即為給定期望跟蹤目標值。 表1為風速在12.5~30 m/s范圍內高速列車的安全運行速度(期望跟蹤目標值)。由表1可知,當風速達到12.5 m/s時,列車的期望跟蹤安全運行速度為350 km/h;當風速達到30 m/s時,列車的期望跟蹤安全運行速度為130 km/h。圖1為不同強風風速下的列車安全運行速度曲線,由圖1可以看出,風速越高,列車期望跟蹤安全運行速度越低;風速越低,期望跟蹤安全運行速度越高,但是,風速與列車速度之間的關系并非是完全線性的。 表1 不同風速下列車安全運行速度 以往在分析大風環境下高速列車運行安全性時,風速和風向普遍采用氣象值,但是由文獻[6]的計算結果可知,這種方法與實際情況存在較大差異。因此本文參考德國鐵路的Nowcasting系統[19],將測風儀安裝在特大橋梁或高架橋、路堤、高路堤及風口危險路段線路旁接觸網支柱上,距迎風側軌道中心線的水平距離為3.8 m,距軌面的垂直距離4.0 m[20]。沿著風區路段線路布置的測風點不斷采集最新測得的風信號(風速與風向角),傳送給列車控制系統,計算出風區最大脈動風速和平均風向角,與列車安全運行速度比較計算,通過模型計算列車運行前方的安全運行速度,并對速度追蹤控制。因此強風環境下為了實現列車運行過程高精度速度追蹤控制,需要設計更有效的控制器對列車安全運行速度進行實時控制。 采用SMARC方法設計滑模自適應魯棒H∞ATO控制器,其系統結構見圖2。 我們在分析完林毅夫教授的“三歸納”法和我們課上講的關于資料分析加工的方法之后,我們可以看出,兩者在對事物進行研究的時候都同時采用了“橫向與縱向”的分析方法,說明這兩種研究方法非常重要,無論是在經濟學領域還是在教育學領域,所以我們在以后的教育研究重要好找掌握這兩種研究方法,并且也要牢記老師在課上指出的注意事項,這樣才能讓這兩種研究方法發揮更好的作用。 列車運動方程表示為 (10) 式中:u(t)為列車牽引/制動輸入;g(x1,t)為附加阻力的干擾。 為敘述方便取 (11) 式中:Δ為內、外干擾和列車模型變化的總的不確定,定義滑模函數為 (12) (13) 可得 (14) (15) 則 (16) 控制律設計為 (17) 式中:ks為趨近律指數項系數,ks>0;η為系統運動點趨近切換面的速度,η>0。 (18) 取自適應律為 (19) 則 │s│+Δs≤-kss2≤0 (20) (21) (22) 本文采用在國內某高速鐵路線路上運行的CRH380A型高速列車為目標,并利用MATLAB 軟件進行數值仿真與分析,為顯示SMARC的控制效果優點。同時也對PID和魯棒自適應控制器控制效果進行仿真。 基于SMARC的高速列車運行過程模型,在Matlab/Simulink環境下采用的組態參數為:固定步長為 0.001 s,開始時間為0.0 s,停止時間2 000 s。此外,模擬時列車啟動加速到350 km/h,分別模擬高速列車通過風速為15 m/s的順風環境、22.5 m/s的逆風環境、30 m/s且風向角α=45°的風區路段后,再減速至停止。且列車所受大風阻力的快慢時變擾動函數表達式為式(23)。該列車運行時段鐵路線長度為156.5 km,其中風區鐵路線路長度為48.25 km,其余高速列車運行過程仿真參數見文獻[22]。 d(t)=sin(w1t)+cos(w2t) (23) 式中:w1=1、w2=1 000為時變參數。 依據表1和圖1,高速列車在風速為15、22.5、30 m/s的風區所模擬的給定安全運行速度曲線見圖3,其中,v1、v2、v3分別為高速列車在15、22.5、30 m/s風速下的給定安全運行速度曲線。所仿真高速列車運行方式為:牽引(啟動)-恒速(350 km/h)-制動(減速)-恒速(風區速度)-牽引(提速)-恒速-制動(停止)。 為了驗證在強風環境下SMARC對高速列車運行速度跟蹤控制的有效性和精確性,本文也對PID控制和魯棒自適應控制在3種不同風速下得到的高速列車速度跟蹤控制和控制力進行仿真,并對結果進行對比。3種控制策略在3種風速下得到的速度跟蹤曲線如圖4所示,控制力曲線如圖5所示。從圖4可見,在列車的運行過程中,采用PID和魯棒自適應控制策略得到的速度跟蹤曲線都存在誤差,特別是列車在風區運行階段誤差較大,這說明高速列車在這兩種控制策略下,對期望安全運行速度的跟蹤存在一定誤差,尤其列車在強風環境中運行時,這種誤差更加明顯,而且隨著風速增加,誤差也隨之增大。采用SMARC控制策略得到的速度跟蹤效果在無風環境下表現良好,可以滿足期望要求。列車在風區運行時,在受到大風阻力及干擾的條件下,列車對期望運行速度仍存在較高精度的跟蹤。在圖4中,當時間為700 s時,實際上列車已駛入強風區,這時大風較大地影響到高速列車模型參數外部空氣阻力系數a2,使其突變后增大。與此同時,采用PID和魯棒自適應控制得到的速度跟蹤曲線在參數a2突變點均出現不同程度的跳變現象,而且這種跳變現象一直延續到1 200 s后列車駛出風區才結束,這種情況對乘客的舒適度產生不良的影響,也嚴重威脅到高速列車的安全運行。而采用SMARC得到的速度跟蹤曲線可以較好地抗強風阻力及干擾造成參數a2突變產生的問題,隨之也消除了跳變現象造成的不良影響,達到高精度跟蹤期望速度曲線的目的。說明采用SMARC控制策略控制時具有較好的魯棒性,能夠解決在強風干擾時PID和魯棒自適應控制方法對高速列車安全運行速度跟蹤存在的誤差問題。 由于在15、22.5、30 m/s風速下得到的單位控制力曲線基本相似,所以本文只給出了風速為22.5m/s時的單位控制力曲線。從圖5可見,采用PID和魯棒自適應控制策略得到的控制力,不論列車在無風環境下運行還是在風區運行,其跟蹤控制曲線變化率都較大,影響安全性和乘客的舒適性;采用SMARC得到的單位控制力曲線,不管是列車處于牽引或制動階段,還是列車在風區運行階段,其單位控制力曲線均比較平緩,能夠滿足乘客舒適性和行車安全性的要求。 從圖4、圖5的仿真結果可知,與PID和魯棒自適應控制算法相比,本文所提出的SMARC方法,不但使系統的輸出具有較強的魯棒性,而且還具有較好的動態性能。不論圖4中的速度跟蹤曲線還是圖5中的單位控制力曲線,均可以明顯看出,其SMARC控制后的曲線比較光滑。因為在滑模控制過程中引入自適應方法,用自適應律消除系統參數的不確定性對控制精度的影響,實現漸近穩定的控制。同時,在滑模自適應控制過程中加入的魯棒H∞控制,增加了SMARC控制器的抗干擾能力,也消除了系統抖振現象,達到魯棒跟蹤目的。 本文針對大風環境下高速列車運行過程模型參數時變和系統非線性不確定特性,提出一種滑模自適應魯棒H∞控制算法。該算法首先用自適應控制實時逼近列車不確定性特征的系統輸入系數,然后采用魯棒H∞控制將系統中所有不確定量在確定時間內減小到最小范圍,并且魯棒H∞控制器較好地抑制了滑膜控制過程中系統狀態非線性變結構抖振問題。仿真結果表明,本文設計的SMARC控制器在大風環境下運行的高速列車ATO控制系統的速度跟蹤控制中,較好地克服了系統非線性、參數不確定特性和強風擾動的影響;對不同風速下給定的列車安全運行速度具有高精度的跟蹤能力,不管在無風環境下還是列車通過風區階段的安全運行速度跟蹤效果,均明顯優于傳統PID控制器和智能魯棒自適應控制器得到的跟蹤速度,滿足強風下高速列車實際運行速度對期望目標速度的高精度跟蹤要求。 NDEZ A, SICRE C,et al. Fuzzy Optimal Schedule of High-speed Train Operation to Minimize Energy Consumption with Uncertain Delays and Driver’s Behavioral Response[J]. Engineering Applications of Artificial Intelligence, 2012, 25(8):1548-1557. [12] 顧桂梅,蒲松芝.基于模糊廣義預測控制算法的ATO系統仿真研究[J].城市軌道交通研究,2014,17(1):69-73,94. GU Guimei, PU Songzhi. Simulation of ATO System Based on Fuzzy Generalized Predictive Control Algorithm[J]. Urban Mass Transit, 2014,17(1):69-73, 94. [13] FAIEGHI M, JALALI A, MASHHADI S K M. Robust Adaptive Cruise Control of High Speed Trains[J]. ISA Transactions, 2014, 53(2):533-541. [14] YANG C D, SUN Y P. Mixed H/H Cruise Controller Design for High Speed Train[J]. International Journal of Control, 2001,74(9): 905-920. [15] 段洪君,史小平.基于滑模自適應的飛行器魯棒姿態控制[J].兵工學報,2009,30(7):1004-1008. DUAN Hongjun, SHI Xiaoping. Robust Attitude Control for Micro Air Vehicle Based on Sliding Adaptive Algorithm[J]. Acta Armamentarii, 2009, 30(7): 1004-1008. [16] 陳南翼,張健.高速列車空氣阻力試驗研究[J].鐵道學報,1998,20(5):40-46. CHEN Nanyi, ZHANG Jian. Experimental Investigation on Aerodynamic Drag of High Speed Train[J]. Journal of the China Railway Society, 1998,20(5):40-46. [17] 田紅旗.風環境下的列車空氣阻力特性研究[J].中國鐵道科學,2008,29(5):108-112. TIAN Hongqi. Study on the Characteristics of Train Air Resistance under Wind Environment[J]. China Railway Science, 2008,29(5):108-112. [18] 楊婧.側風下高速列車運行安全性分析[J].機械工程與自動化,2016(5):19-20,24. YANG Jing. Safety Analysis of High-speed Train under Crosswind[J].Mechanical Engineering & Automation, 2016(5):19-20, 24. [19] 王璐雷,徐宇工,毛軍.強側風對高速列車運行安全性的影響及其控制[J]. 內燃機車,2004(10):5-8,19. WANG Lulei, XU Yugong, MAO Jun. Influence of Strong Side-wind on the Operation Safety of High-speed Train and Its Control[J]. Diesel Locomotives, 2004(10): 5-8, 19. [20] 馬淑紅,馬韞娟,程先東,等. 我國高速鐵路沿線強風區間的確定方法及風險評估[J].鐵道工程學報,2011,28(3):37-45. MA Shuhong, MA Yunjuan, CHENG Xiandong, et al. Determining Method and Risk Assessment of Strong Wind Region along High-speed Railway in China[J]. Journal of Railway Engineering Society, 2011,28(3): 37-45. [21] LIAN J, ZHAO J. Robust HControl of Uncertain Switched Systems: a Sliding Mode Control Design[J]. Acta Automatica Sinica, 2009, 35(7): 965-970. [22] 李中奇,楊振村,楊輝,等.高速列車雙自適應廣義預測控制方法[J].鐵道學報,2015,36(6):120-126. LI Zhongqi, YANG Zhencun, YANG Hui, et al. Generalized Predictive Ccontrol with Dual Adaptation Strategy of High Speed Train[J]. China Railway Science, 2015, 36(6):120-126.
3 強風下高速列車運行過程速度跟蹤控制
3.1 不同風速下列車安全運行速度確定
3.2 風速與風向測量
3.3 高速列車滑模自適應魯棒控制器

4 仿真與討論
4.1 仿真參數
4.2 給定安全運行速度曲線
4.3 仿真結果
5 結束語
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06
