寬測繪帶星載環視掃描SAR成像方案研究*
2018-07-18 00:59:36,,2
雷達科學與技術 2018年3期
關鍵詞:測繪
, ,2
(1.南京航空航天大學電子信息工程學院, 江蘇南京 211106;2.南京航空航天大學雷達成像與微波光子技術教育部重點實驗室, 江蘇南京 211106)
0 引言
環視掃描合成孔徑雷達(Synthetic Aperture Radar, SAR)是一種能夠實現廣域觀測的新模式SAR。不同于條帶、聚束等經典模式只能獲得沿航跡一側的場景信息,環視掃描SAR的天線以地面垂線為軸線作360°圓錐掃描,能對飛行航跡下方的環狀區域進行高效觀測。這種模式雖然增加了雷達的可觀測范圍,卻仍然受到傳統SAR系統的最小天線面積約束,即高分辨率和寬測繪帶的指標不能同時滿足,由于星載SAR的軌道高、飛行速度快,這一問題較之機載SAR更為突出。
寬測繪帶一直是SAR技術的重要研究方向,采用經典的條帶工作模式很難達到測繪應用中帶寬幾百公里的要求,對此需要研究出新的掃描模式或工作體制。其中多通道技術在高分辨率寬測繪帶雷達上得到了廣泛應用,文獻[1]提出采用方位多波束解多普勒模糊實現了寬測繪帶;文獻[2]提出了多維波形編碼與數字波束形成(Digital Beam Forming, DBF)技術相結合的方法;文獻[3]提出了一種方位向多波束和距離向多層掃描結合的新型工作模式(MAB-ScanSAR),還有一些學者也提供了類似的解決方案[4-6],基本思想都是基于DBF技術的多發多收模式,雖然有效,但缺點是對系統要求高且信號處理過程復雜。而單發單收體制雷達中掃描模式SAR(ScanSAR)[7]仍然是實現寬測繪帶最經典而高效的方法,在這種工作模式下,雷達平臺沿航跡飛行時,對距離向上的多個子帶進行周期性掃描,使得測繪帶寬實現了相對于條帶模式幾倍的擴展,但同時也要付出犧牲方位向分辨率的代價。
本文將在機載環視掃描SAR的研究基礎之上,探索引入ScanSAR工作特點的寬測繪帶星載環視掃描SAR成像方案,特別是,通過合理地設置天線掃描速度和劃分子孔徑成像,可以達到不損失方位向分辨率而測繪帶寬提升的效果。
1 星載環視掃描SAR幾何模型
星載環視掃描SAR的幾何關系如圖1所示。
衛星以速度va沿軌道飛行,假設零時刻衛星位于O點,星下點位于O′點,飛行高度為H,瞄準點(波束中心與地表的交點)位于C點,下視角為γ,多普勒錐角為α,地平面斜視角為θr;衛星飛行過程中天線勻速旋轉,掃描航跡下方環狀區域,掃描速度為ΩM,設定順時針轉動θr為負,反之為正;βr,βa分別為距離向波束寬度和方位向波束寬度,波束地面足印可近似為一個扇形區域(實際為橢圓),扇形弧對應的圓心角為φa。對此有
(1)
式中,Wa為方位向瞬時覆蓋寬度,Wr為距離向測繪帶寬度,Re為地球半徑。X波段星載SAR在軌道高度475 km、常用下視角10°~60°時,測繪帶寬為10~40 km,可見傳統環視掃描模式的測繪帶寬遠達不到寬測繪帶的標準。
2 結合ScanSAR的成像模式設計
環視掃描SAR與條帶模式SAR一樣,在掃描過程中只能形成一個測繪帶,而ScanSAR通過周期性地切換天線俯仰角可以生成若干個子帶,使SAR的測繪帶寬得到幾倍的增長。波束掃過所有子帶完成一次循環的回歸時間記為TR,兩個回歸時間之間的波束覆蓋區若適當重疊,則可以生成連續圖像。在第i個子帶內的駐留時間記為Tbi,若忽略天線波束指向的切換時間,且假設每個子帶的駐留時間相同,則有TR=Ns·Tb,Ns為子帶數。各子帶的回波信號作全孔徑聚焦處理后,經輻射校正和圖像拼接可得到完整的SAR成像結果。
借鑒ScanSAR的掃描思想,令環視掃描SAR的天線在作圓錐掃描的同時,也在各個子帶間周期性切換。Ns=3的掃描時序如圖2所示,將Ns個子帶合成的整個測繪帶看作由一個寬波束照射而成,φa對應的扇形為合成的寬波束照射區。因此,這種新環視掃描模式下的成像核心仍然是劃分子孔徑成像,其基本思路是選取相鄰兩個子孔徑的共同成像區域等效為聚束照射區域。圖2(a)中步驟①~③完成第一個子孔徑時間Tsub的照射,圖2(b)中④~⑥完成下一個子孔徑時間的照射,波束指向按圖中數字標記在3個測繪帶之間交替進行,陰影區為每次掃描各子帶的完全照射區域,可以看出相鄰子成像區有重疊,達到分辨率均勻的基本要求。因為照射鄰近子帶所需成像參數差異較小,此時假設每個子帶的駐留時間相等,即Tb=Tsub/Ns。這種處理方式也將ScanSAR中的回歸時間和環視掃描SAR中的子孔徑時間相聯系,有TR=Tsub,且最終測繪帶寬近似為傳統環視掃描SAR的Ns倍。
由于子帶共享子合成孔徑時間,方位向分辨率降為預設的Ns倍。即預設子帶方位分辨率為ρa時,由
(2)
得到
(3)
(4)
式中,α為多普勒錐角:
(5)
圖3為合成的寬波束地面足印掃描幾何圖,由于衛星高速向前飛行,瞄準點連線在地面呈螺旋狀分布。
定義波束地面斜視角θr以刻畫掃描情況,在一個Tsub時間內,θr由θr1增加到θr2,且有|θr2|-|θr1|=ΩM·Tsub。圖中的斜線交叉區為兩個子孔徑時間的公共成像區,其覆蓋面積由天線掃描角速度ΩM決定,若天線掃描速度過大,則公共區較小,相鄰的成像區之間會存在場景間斷;若天線掃描速度過小,則公共區較大,又致使大面積的場景重疊,這兩種情況都不利于后續的圖像拼接。在滿足方位向分辨率要求的一個Tsub時間內,令天線恰好掃過波束足印寬度φa的一半可以使相鄰成像區之間既不存在間斷也不出現重疊現象,成像效率達到最高,即令
(6)
綜合式(4)、式(5)、式(6),可得
(7)
理論上說,ΩM是時變的,也就是天線必須非勻速旋轉掃描。這有兩方面原因,其一是Ω0表征了相對于每一個子成像區中心的等效旋轉角速度,它隨時間變化;其二是SAR的方位分辨率ρa與多普勒錐角α有關,聚束照射模式下回波信號的多普勒帶寬近似為
(8)
α越小,Bd越小,因此ρa隨著斜視角的增大而惡化,若要使整個圖像的分辨率均勻,此時天線也必須作非勻速旋轉。由式(7)可知為使圖像達到相同的ρa,斜視情況下的天線旋轉角速度應比正側視情況下更慢。考慮到實際雷達系統實現這一條件的復雜性,以及本文重點在于成像方案和算法的驗證,仿真中仍采用固定旋轉角速度。
3 成像處理流程
圖4為完整的成像算法流程,包括每個子帶的子圖成像、幾何失真校正和圖像拼接。考慮到單個子帶的處理流程在機載和彈載SAR中已有應用[8-9],下文主要將其擴展至星載SAR成像處理。
3.1 子圖成像算法
子圖的聚焦處理采用基于轉臺原理的線性距離多普勒(LRD)算法,它不僅能夠穩定地實現大斜視角成像,并且計算量小、實時性高。LRD算法各步驟功能如下:
1) 距離脈壓,完成距離向的匹配濾波;
2) 空不變運動補償,包括逐脈沖的距離對準(一般以成像區中心點為參考點)和相位補償兩部分;
3) 方位聚焦,經過方位FFT得到聚焦后的距離多普勒域SAR圖像。
其中最為關鍵的步驟是運動補償,這種以固定點為參考的運動補償使得該算法具有一定局限性,即對除了成像區中心點外各點的運動補償存在殘余空變誤差,且誤差隨成像區尺寸和斜視角的增大而惡化,聚焦質量會受到影響。本文所提寬測繪帶成像方案主要用于對大面積地表的觀測,分辨率要求通常在幾十米量級,故由LRD算法帶來的成像誤差可以暫時忽略不計。
3.2 幾何失真校正
圖像幾何失真指成像結果不是地面散射點分布的真實反映,它通常受到雷達平臺高度、波束視角及斜視角等諸多因素的影響,因此,成像結果的幾何失真校正應以逐點校正為基礎,校正過程如下:
1) 在成像區域內設置等間距的地面校正網格點,如圖5所示。校正點坐標以地心慣性坐標系為基準,相鄰點間隔按照圖像分辨率(地距)要求放置。
2) 逐點判斷校正點是否在當前波束照射范圍內,若在,根據距離多普勒方程解算出該點在對應子圖中的位置。
設任意校正點P在地心慣性坐標系下的坐標為(xp,yp,zp),子孔徑中心時刻雷達天線相位中心(APC)的坐標為(xc,yc,zc)。用LRD算法成像,P點在成像結果中的距離向坐標NrP取決于該點與參考點相對于孔徑中心時刻APC的距離之差,即
(9)
P點的方位向坐標NaP取決于該點與參考點相對于APC的多普勒頻率之差,即
(10)
3) 在子圖中將(NaP,NrP)位置的信號取出,通常(NaP,NrP)不會是整數,要經過插值操作將信號放入校正點(xp,yp,zp)對應的圖像矩陣位置上,成像區內所有校正點都要進行以上坐標定位換算,直到得到全部分辨單元(xp,yp,zp)?(NaP,NrP)的對應關系,完成幾何失真校正。
3.3 環形圖像拼接
以上操作得到了校正后的子圖,最終的成像結果需進行子圖的拼接,為了實現“邊掃描邊成像”并降低中間存儲量,圖像拼接采用與幾何失真校正相結合的方式,具體操作如下:
1) 根據星載SAR系統的已知參數,預先計算出天線掃描一周所覆蓋的地面面積,并通過在此范圍內鋪設校正點來確定最終輸出圖像的大小和每個像素點對應的地理坐標位置。
2) 子圖成像后,根據3.2節校正單個子圖的幾何失真,同時將逐像素點得到的校正值直接放入1)中完整輸出圖像的對應位置。
3) 隨著相鄰的子圖完成校正和存儲,最終的環形圖像也在這個過程中連續形成,任何時刻的中間成像結果都可以實時輸出。
4 仿真與分析
結合具體軌道參數對提出的寬測繪帶星載環視掃描SAR成像方案進行點目標和面目標仿真驗證。軌道參數如下:長半軸6 585 km,偏心率 0.001 1,軌道傾角23.2°,近地點幅角90°,升交點赤經0°,軌道高度475.7 km。
點目標仿真中使用的X波段SAR系統參數如表1所示,雷達天線以固定角速度ΩM順時針掃描下視角為10.4°,14.2°和18°的3個子帶,在地表相距2 km放置的點目標相繼進入波束照射范圍內。為了直觀地看出各子帶,特意設置子帶間沒有重疊。成像處理時將全孔徑數據分成187個子孔徑,子孔徑數據經過LRD處理,中間子帶在一個掃描周期中的12幀子圖如圖6所示。顯然,所用LRD算法能夠實現任意天線波束指向的圖像聚焦,但存在明顯的幾何失真和斜視角旋轉(除正側視方向),不能直接用于環形圖像的拼接輸出,且失真程度隨斜視角的增大而惡化,還發生了“卷繞”現象,因此在使用式(10)計算校正點坐標時要注意“解模糊”的問題[9]。
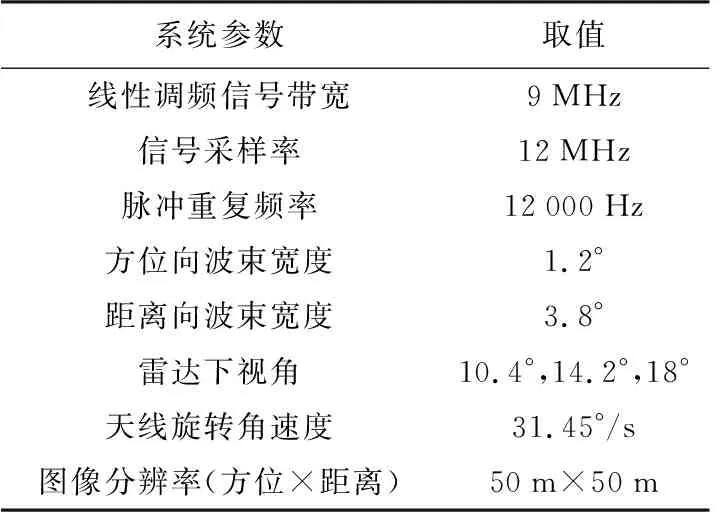
表1 X波段星載環視掃描SAR系統參數
圖7(a)為完成了幾何失真校正的完整拼接圖像,內外徑分別為173 km和71 km,總測繪帶寬達到102 km。同時圖7(b)也給出了傳統環視掃描SAR以下視角18°掃描一周的成像結果,可見利用本文提出的方法,在子孔徑時間內進行三層掃描使得測繪帶寬得到了兩倍的增加。圖7(a)中矩形框1所示正側視校正放大圖如圖8(a)所示,各點目標聚焦良好且被校正到大地坐標系下。圖8(b)為矩形框2所示斜視校正放大圖,幾何失真校正處理完成了解卷繞,斜視角旋轉得以恢復,且各點目標符合預設位置和分布,但由于是斜視成像,分辨率有所下降;圖8(c)為矩形框3所示前視校正放大圖,此時距離信息完全與多普勒信息耦合,因此校正結果也只能區分距離遠近,無法分辨方位向,但點目標在距離向上仍保持了均勻分布的特點。
為進一步檢驗圖像拼接效果,考慮利用一種基于圖像逆成像處理的高效回波模擬方法來進行面目標仿真[10]。地面場景用日本ALOS-2采集的熊本地震數據來模擬,如圖9所示,場景中相鄰像素間隔設為50 m×50 m。仿真掃描了高度475 km軌道上下視角為20°~35°的6個子帶,同點目標仿真一樣,設置子帶間沒有重疊,成像區內外徑分別為362 km和160 km,即測繪帶寬達到202 km。圖10為成像中間結果,由圖10(c)掃描一周的情況可見,沒有出現折疊和錯位等現象,相鄰子孔徑場景連續變化,只是在航跡前后方區域,受雷達體制限制,無法實現方位高分辨率。圖9和圖10(c)中矩形框的放大圖如圖11(a)和11(b)所示,可見多處強散射點聚焦質量良好,散射特性相似,目標相對位置準確且由圖中的鐵軌可知沒有明顯的形變,說明了本文方法對面目標成像的有效性。實際應用中為了圖像的拼接效果,可以設置各子帶的照射范圍有部分重疊,成像結果中的黑線即可消去。
5 結束語
針對傳統星載環視掃描SAR成像模式觀測范圍十分有限的情況,結合ScanSAR模式,研究了在子帶間分配合成孔徑時間的寬測繪帶掃描模式和成像方案。點目標和面目標仿真實驗驗證了本文所提方案的有效性,與傳統環視掃描模式相比,在保證成像質量的前提下能夠實現測繪帶數倍的擴展,為大面積海洋觀測和植被測繪等實際應用提供了一定的依據。仿真中所采用的LRD算法僅用于本方案有效性的驗證,未來可以研究更高分辨率的寬測繪帶星載環視掃描SAR成像算法。
猜你喜歡
城市勘測(2023年5期)2023-11-03 01:32:36
經緯天地(2021年5期)2021-12-27 02:32:28
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛星與網絡(2015年5期)2015-12-20 09:07:37
衛星與網絡(2015年12期)2015-10-27 02:21:46
河南科技(2014年1期)2014-02-27 14:04:09
