面向智能挖掘機的最優挖掘軌跡規劃
2018-05-30 00:57:44孫偉,李二洋,王曉邦,郭正剛,李旭東,宋學官
大連理工大學學報 2018年3期
孫 偉, 李 二 洋, 王 曉 邦, 郭 正 剛, 李 旭 東, 宋 學 官
( 大連理工大學 機械工程學院, 遼寧 大連 116024 )
0 引 言
大型礦用挖掘機工作效率高、施工穩定性好、環境適應能力強,一直被廣泛應用于煤礦、鐵礦等露天礦場的作業中[1].但是長期以來大型礦用挖掘機的操作完全依賴工人經驗,不僅挖掘效率低下,而且故障頻發.因此針對其智能化與自動化方面的研究已逐漸成為各國相關研究機構的研究熱點[2-3].智能挖掘機的自動作業規劃能提高挖掘機工作的安全性和控制的準確性,減小驅動系統和執行系統的沖擊振動,使挖掘機運行更加平穩,挖掘能耗以及操作人員的工作強度降低[4].近年來,國內外諸多學者針對挖掘機的控制參數做了很多研究.申立軍[5]以挖掘后角、提升繩與斗桿中心夾角為目標函數,對挖掘機提升和推壓速度進行了優化設計,使挖掘過程更加平穩.Wei等[6]提出了一種新的挖掘阻力計算模型,通過對軌跡進行多項式曲線擬合,并優化多項式方程系數,得到了近似最優軌跡.Awuah-Offei等[7]在對挖掘機進行動力學分析的基礎上,以挖掘單位質量的物料所消耗的能量為目標函數,對挖掘機提升和推壓速度進行了優化.上述研究大多只針對特定形狀的料堆,以挖掘后角變化最小為目標函數進行優化,而沒有計算最佳后角的方法;不僅如此,研究中還忽略了電機的加速和減速過程,對挖掘機整個挖掘過程的預測存在一定的局限性,并不適用于智能挖掘機[8-9].
本文針對上述研究中存在的問題,基于McKyes等[10-11]挖掘阻力預測模型,綜合考慮物料的重力、鏟斗與物料間的摩擦力以及速度和鏟斗兩側物料對挖掘阻力的影響,構建一種適用于大型礦用挖掘機的動態挖掘阻力預測模型,并在新的挖掘阻力預測模型的基礎上,提出一種能量最優的挖掘機自動作業規劃方案,實現挖掘機作業時針對不同料堆形狀的軌跡規劃,為智能挖掘機的連續作業提供理論基礎.
1 數學模型的建立
1.1 智能挖掘流程
智能挖掘機的構成如圖1所示,其工作流程為:挖掘機在得到作業任務后,通過3D掃描儀得到物料的料堆形狀,然后通過控制系統計算得出挖掘最優軌跡并轉化成控制參數,執行機構在提升機構和推壓機構的共同驅動下完成挖掘過程.
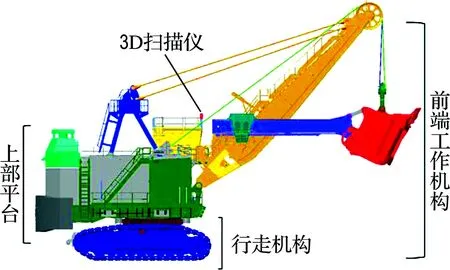
圖1 智能挖掘機的構成Fig.1 The composition of intelligent excavator
1.2 挖掘軌跡的計算
如圖2所示,挖掘機作業時鏟斗在提升機構和推壓機構的配合下插入料堆底部(A點);然后鏟斗向前向上運動,此過程中,被挖掘物料逐漸流入鏟斗內,運動到B點時,推壓機構停止運動,推壓桿長度不再變化;提升機構繼續運動,開始抽斗,直至鏟斗離開料堆(C點),完成挖掘.挖掘過程完成后,回轉機構驅動挖掘機上部平臺旋轉至卸料位置(裝載卡車處),打開斗門卸料,然后再復位到挖掘起始位置,一次挖掘過程完成.行走機構驅動挖掘機向前運動,進入下一次挖掘過程.
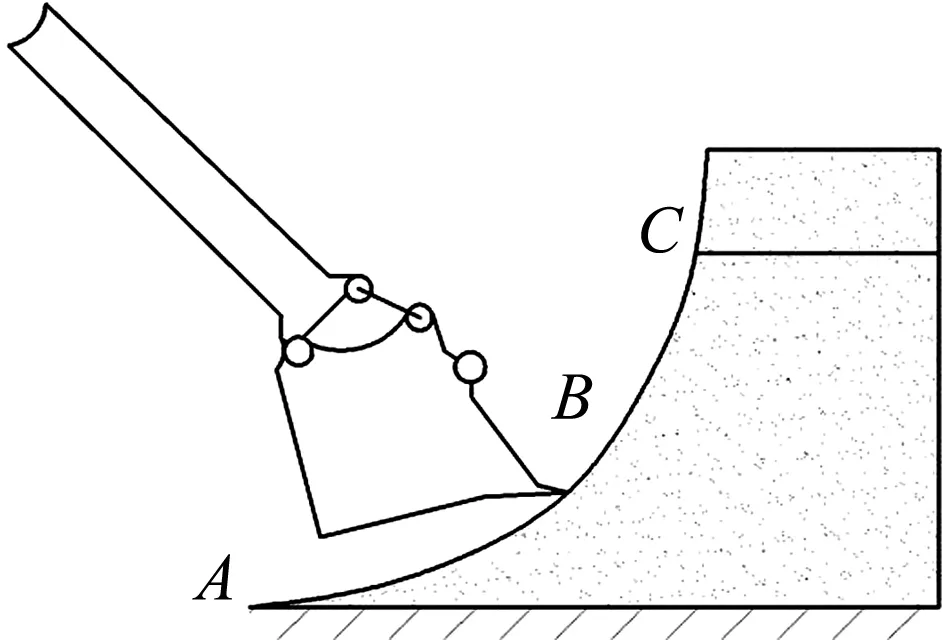
圖2 挖掘機挖掘軌跡Fig.2 The excavating trajectory of excavator
因為本文研究對象為單斗桿挖掘機,鏟斗姿態只和推壓運動、提升運動以及挖掘機的初始姿態有關,在任意位置,鏟斗只有一種姿態.因此,挖掘機的挖掘軌跡即為斗齒齒尖劃過的軌跡,如圖3所示.
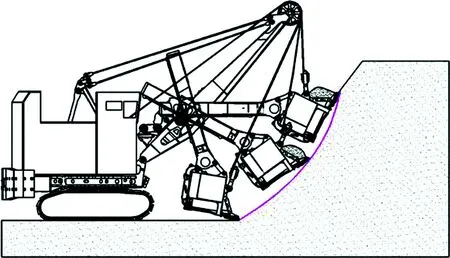
圖3 挖掘機的工作過程Fig.3 Excavator working process
如圖4所示,挖掘過程中推壓機構和提升機構的運動為加速—勻速—減速,其速度可以用分段函數表示為
(1)
(2)
式中:vg、vs分別為推壓機構、提升機構的輸出速度;tug、tdg分別為推壓機構加速、減速時間;ag為推壓機構加速度;tg為推壓機構運行時間;tus、tds分別為提升機構加速、減速時間;as為提升機構加速度;ts為提升機構運行時間.

圖4 挖掘機構速度曲線Fig.4 Speed curve of excavating device
挖掘機工作過程中的主要參數如圖5所示,在推壓機構的輸出速度vg和提升機構的輸出速度vs已知的基礎上,通過幾何關系可知:以物料的底端為原點,以水平方向為X軸,豎直方向為Y軸,建立直角坐標系,挖掘過程中齒尖D點的切向速度vt和法向速度vn分別為
(3)
式中:A7為提升繩與斗桿的夾角.
水平、豎直速度為
vx=vtcosA3+vnsinA3
(4)
vy=vtsinA3-vncosA3
(5)
式中:A3為極徑與豎直方向的夾角.
則斗齒齒尖的軌跡方程為

(6)
(7)

圖5 挖掘過程中參數關系Fig.5 Parameter relation in the process of excavating
1.3 挖掘深度d和挖掘體積V的計算
首先,定義挖掘深度為斗齒齒尖到物料表面的最小距離.由圖6可知,任意一點的挖掘深度為
d=(Xtanλ-Y)cosλ
(8)
式中:λ為物料斜面與水平方向的夾角.
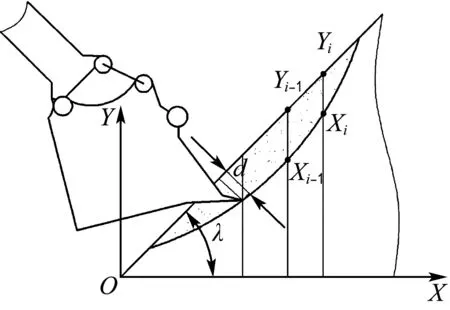
圖6 挖掘體積示意圖Fig.6 Excavating volume schematic
在理想情況下,挖掘體積等于鏟斗齒尖D點掃過的面積S與鏟斗寬度B的乘積,即
V=BS
(9)
在計算挖掘體積時可以把挖掘軌跡離散化,挖掘體積可以通過累加每個小段的體積得到.可知每一段小區間內鏟斗鏟裝物料的體積為

i=1,2,3,…,n
(10)
式中:Yi-1、Yi為齒尖軌跡的縱坐標.
則整個挖掘過程中挖掘體積為
(11)
1.4 挖掘阻力的計算
挖掘機的主要任務是進行礦石裝載,在工作過程中,被挖掘物料對鏟斗產生很大的阻力,這是挖掘機構主要的工作荷載[12-13].因此,一個符合實際測試的挖掘阻力模型,對于挖掘機構的設計和性能分析非常重要.現有的挖掘阻力模型有經驗模型和理論模型兩種.傳統的挖掘阻力計算公式大多采用蘇聯的經驗公式[14-15]:
P=KBd
(12)
式中:K為挖掘比阻力,是被挖掘對象的特征;d為挖掘深度.
考慮到整個挖掘過程是動態的,其挖掘角度、挖掘深度、挖掘速度等參數都是時刻變化的,所以此公式并不適用于整個挖掘過程中挖掘阻力的計算.因此本文在McKyes機-土靜力平衡方程[12]阻力計算模型的基礎上,綜合考慮物料的重力、鏟斗與物料間的摩擦力以及速度和鏟斗兩側物料對挖掘阻力的影響,構建了一種新的動態挖掘阻力預測模型,如圖7所示.
圖7 挖掘過程受力分析Fig.7 Force analysis of excavating process F=Fz+Fτ+Fn+Ff
(13)
式中:Fz為物料和鏟斗本身的重力,方向始終豎直向下,并隨著挖掘過程的進行逐漸增大,直到挖掘結束,其數值為
Fz=γVg+mdg
(14)
其中md為鏟斗質量.
Fτ為切削阻力,主要包括McKyes切向阻力T,速度影響帶來的附加阻力Fv,以及鏟斗兩側物料影響帶來的阻力Fc.
T=w(γgd2Nγ+cdNc+γv2dNa)
(15)
其中Nγ=0.5(cotβ+cotρ)/e,Nc=[1+cotρcot(ρ+φ)]/e,Na=[tanρ+cot(ρ+φ)e]/(1+tanρcotβ),e=cos(β+δ)+sin(β+δ)cot(ρ+φ).
(16)
(17)
式中:β為挖掘后角;δ為機-土摩擦角;φ為內摩擦角;g為重力加速度;γ為物料密度;c為土壤內聚力;ρ為土壤滑裂面傾角.
Fn為由于擠壓物料產生的法向阻力,其垂直于鏟斗運動方向,與挖掘機操作及物料的硬度和狀態相關,很難用解析式表達.
Ff是由Fn產生的摩擦力,其數值為
Ff=Fntanδ
(18)
對于爆破后的礦石,在挖掘機操作適當的情況下,法向阻力與切向阻力的比值ψ=0.30~0.45,即
Fn=ψFτ
(19)
因此Fn的數值大小可以通過法向阻力與切向阻力的比值得出:
(20)
圖8為機械式挖掘機在挖掘過程中任意位置處的受力狀況,主要的受力包括鏟斗斗尖位置處的挖掘阻力Fz、Fn;鋼絲繩提升力Fs,在此不考慮天輪的傳遞效率;鏟斗和物料的重力Fz、斗桿的重力G2;推壓齒輪齒條的推壓力Fg.
以推壓軸中心O1為原點取矩∑MO1=0,即
-Fgr+FsO1PsinA5-G2sin(A2+A4)O1C-
FzO1Qsin(A2+A3)-Fgr+FτrhosinA3+
FnDE/rho=0
(21)
圖8 挖掘阻力分解示意圖Fig.8 Excavating resistance decomposition diagram
將力分別沿著斗桿方向進行分解,建立平衡方程:
Fncos(A3-A2)-G2cosA4-FzcosA1+
Fτtan(A3-A2)+FscosA7-Fg=0
(22)
其中未知量為鋼絲繩的提升力Fs、推壓齒輪齒條的推壓力Fg,兩個方程可求得兩個未知量.
1.5 模型驗證
驗證阻力模型的方法主要有模型之間相互驗證和實測結果驗證兩種方法.但是,由于現有的挖掘阻力模型都有不同的假設條件,這些模型之間很難相互驗證.因此,驗證模型的最好方式是進行實驗,將模型的結果與實測的數據進行比較.為了驗證阻力模型的準確性,選用了太原重工股份有限公司WK-55挖掘機進行阻力測試,測試的工況參數如表1所示.
表1 阻力計算中用到的參數
WK-55挖掘機采用安裝在控制柜內的變頻器控制推壓與提升電機進行挖掘作業,因此可以直接通過變頻器采集挖掘過程中的電流、電壓的歷時變化,并以挖掘機電機的電壓和電流為輸入值計算得到電機的實際輸出扭矩,并根據式(23)、(24)轉化為提升繩和推壓桿的輸出力.
挖掘機推壓力
Fg=Tcicηc/Rp
(23)
式中:Tc為推壓電機的輸出扭矩;ic=39.6,為推壓機構總傳動比;ηc=0.807,為推壓機構總傳動效率;Rp=0.368,為推壓小齒輪節圓半徑.
挖掘機提升力
Fs=2Thihηh/Rd
(24)
式中:Th為單個提升電機的輸出扭矩;ih=51.061,為提升機構總傳動比;ηh=0.884,為提升機構總傳動效率;Rd=0.864,為提升鋼絲繩在提升卷筒上的纏繞半徑.
以WK-55挖掘機挖掘堆角為38°物料時的實測阻力與相同控制參數下的模型計算結果進行對比,如圖9所示.結果顯示:挖掘阻力模型計算結果與實測結果很接近,并且略微偏小,這是由于未計入裝載阻力及斗側壁摩擦力所致,也說明了這兩部分在阻力中所占的比重不大.
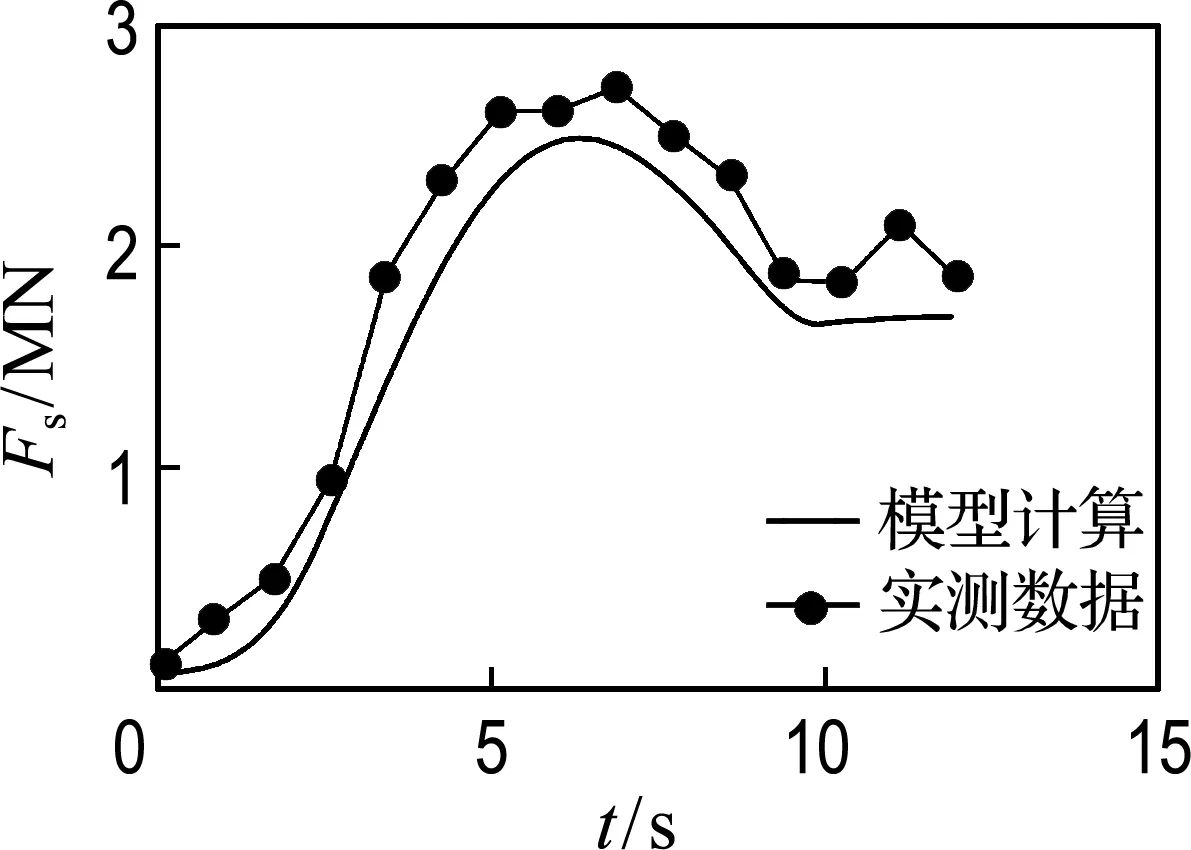
(a) 提升繩受力
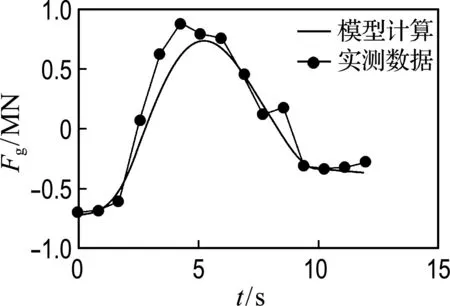
(b) 推壓桿受力
圖9 提升繩和推壓桿受力隨時間變化歷程
Fig.9 The hoist and crowd force changes with time
2 優化設計模型的建立
2.1 挖掘機能耗計算模型
在挖掘作業過程中,挖掘速度從零開始增加,到挖掘結束階段又降為零,即整個系統的總動能不變.因此,挖掘有效功耗可分為重力能耗和阻力能耗,其本質為兩個電機(提升電機和推壓電機)做功,挖掘過程中兩個驅動做功分別為
(25)
2.2 目標函數
大型礦用挖掘機主要用于采礦以及裝載作業,在挖掘過程中主要以斗桿的推壓運動和提升繩的提升運動為主.如何在滿足滿斗率的條件下,使挖掘能耗最小,歷來是人們關心的問題.因此本文將挖掘機作業時挖掘單位質量的物料所消耗的能量作為目標函數:
(26)
式中:m為流入鏟斗內的物料的質量.
2.3 設計變量
影響挖掘機能耗的參數很多,歸納起來有以下3種:物料參數、結構參數、控制參數.為實現挖掘機的智能化,需要對挖掘機的整個挖掘過程包括推壓和提升電機的加速、減速過程進行優化設計,以便智能挖掘機針對不同的料堆形狀選擇不同的控制參數.本文以推壓電機的加速時間tug、減速時間tdg、加速度ag,提升電機的加速時間tus、減速時間tds、加速度as以及初始位置時斗桿與豎直方向的夾角θ0(圖10)作為設計變量,如下式所示:
x=(tugtdgagθ0tustdsas)
(27)
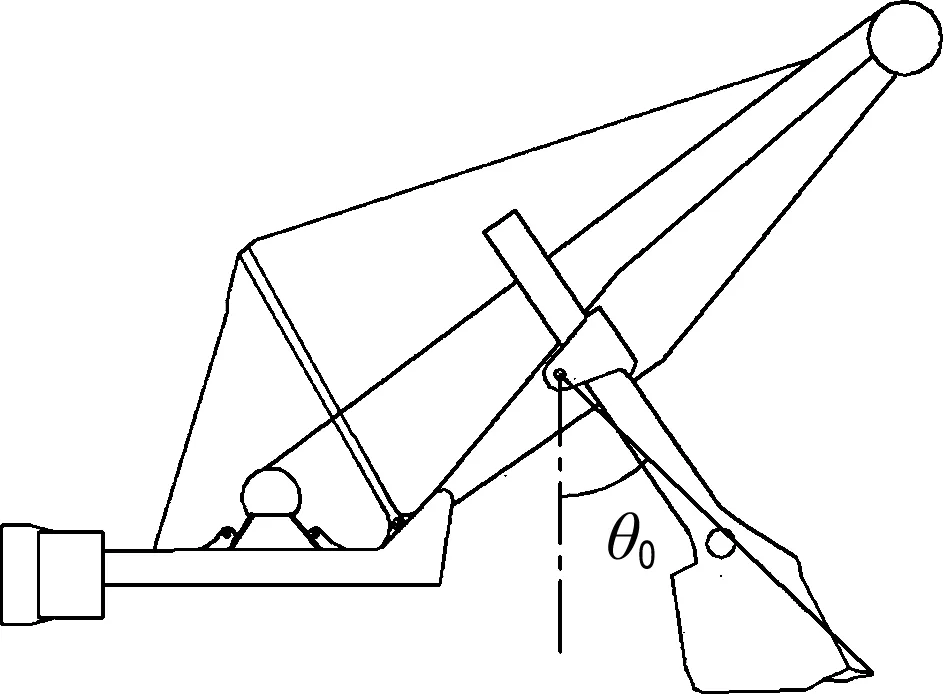
圖10 斗桿與豎直方向夾角Fig.10 The included angle between bucket pod and the vertical direction
2.4 約束條件
挖掘機作業時工作裝置的主要約束條件包括挖掘體積約束、結構參數約束和性能約束.其中結構參數約束指的是挖掘機作業過程中所受到的自身結構尺寸的限制而能夠達到的極限位置;性能約束指的是挖掘機作業時必須保證較高的挖掘效率且不能使電機超負荷運轉.
(1)挖掘體積約束
為了保證挖掘機的工作效率,挖掘過程必須保證90%以上的滿斗率且不能過大,可表示為
Vmin≤V≤Vmax
(28)
式中:Vmin為最小挖掘體積;Vmax為最大挖掘體積.
(2)結構參數約束
挖掘機作業過程中要受到自身結構尺寸的約束,主要包括:
斗桿長度約束
p≤pmax
(29)
式中:pmax為斗桿的最大長度.
挖掘高度約束
hmin≤h≤hmax
(30)
式中:hmin為鏟斗出料時的最小高度;hmax為鏟斗能達到的最大高度.
(3)電機性能約束
WK-55挖掘機提升和推壓電機的功率特性曲線如圖11所示.
挖掘機作業時,受電機性能影響,挖掘機的提升、推壓電機功率必須在其功率特性曲線之內,即

P≤
(31)
式中:P為電機輸出功率,
P-
為電機最大輸出功率.
綜上所述,可以得到優化問題的標準形式為

minE=Ws+Wgms.t.Vmin≤V≤Vmaxp≤pmaxP≤P-hmin≤h≤hmax
(32)
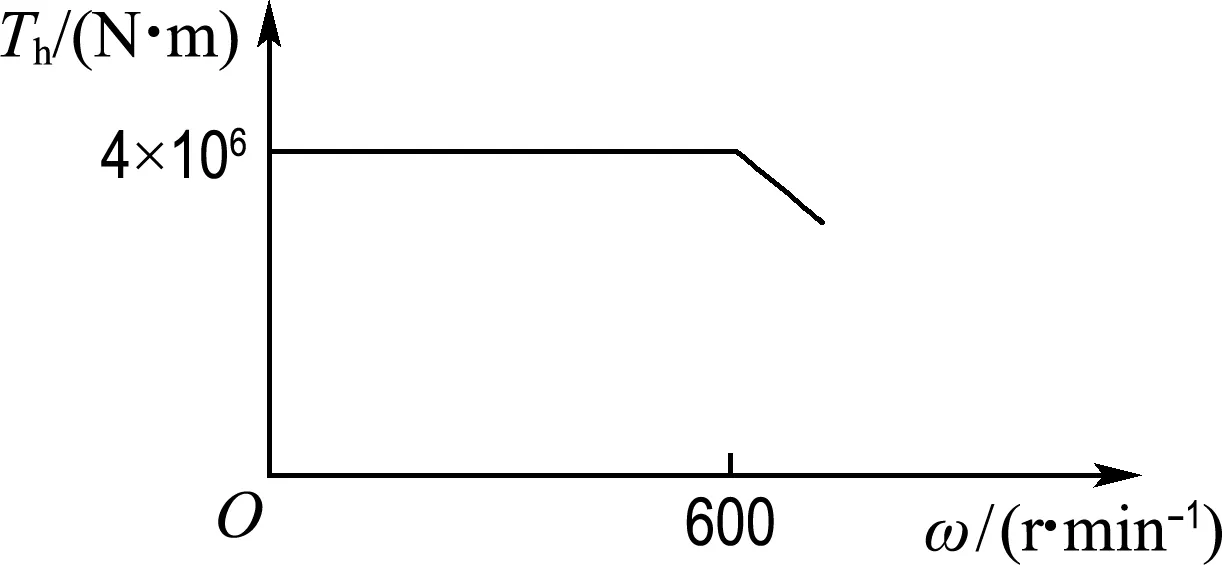
(a) 提升電機
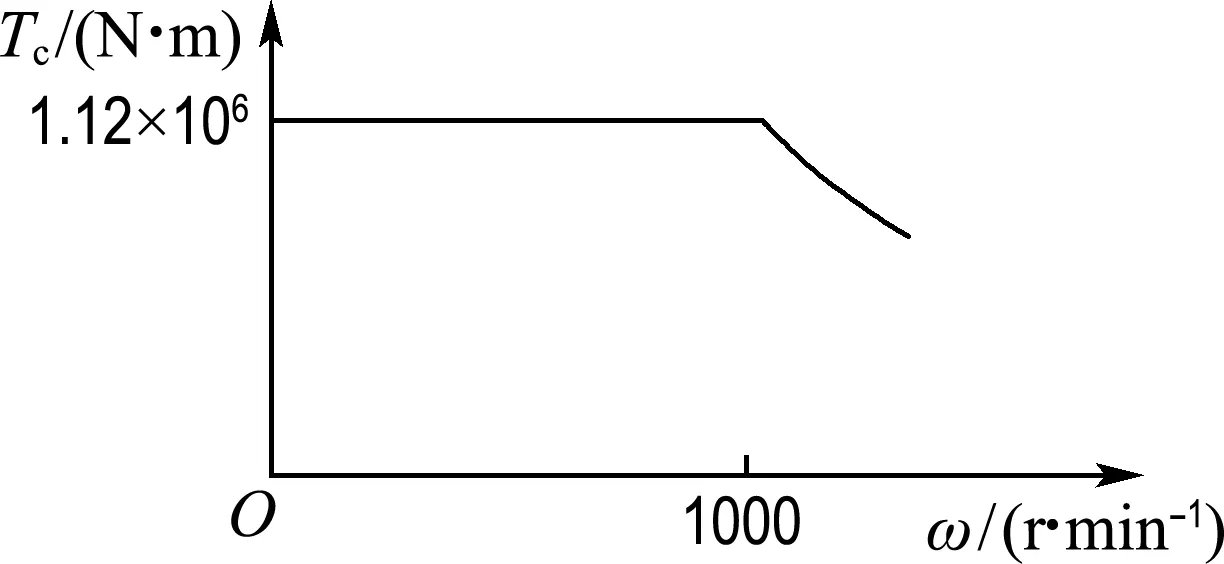
(b) 推壓電機
圖11 提升和推壓電機功率特性曲線
Fig.11 The hoist and crowd motor power characteristic curves
3 模型應用
根據上述大型礦用挖掘機優化設計數學模型,以WK-55挖掘機為例進行最優控制的優化設計.WK-55挖掘機主要被應用在露天礦場的剝離作業中,其主要參數如表2所示.本文主要應用對象為礦山采礦時爆破后的石塊,屬于散體物料.

表2 WK-55挖掘機主要工作參數
綜合考慮挖掘機性能參數以及智能挖掘機的設計要求,確定挖掘機優化模型的參數,并將其代入式(32)中,最終得到其優化模型如式(33)所示.在Matlab中編寫優化程序,應用遺傳算法分別對堆角為38°、43°、48°的料堆進行挖掘軌跡優化.優化后設計變量取值及挖掘作業性能對比分別如表3、4以及圖12所示.
(33)
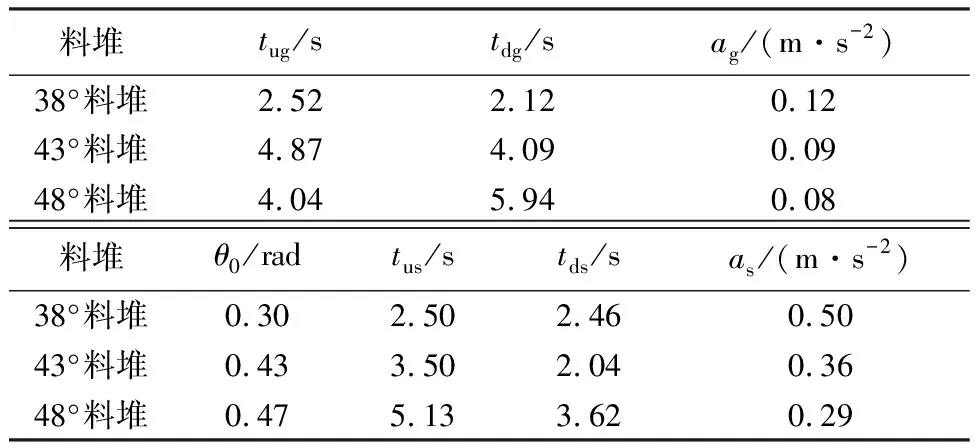
表3 優化前后參數對比
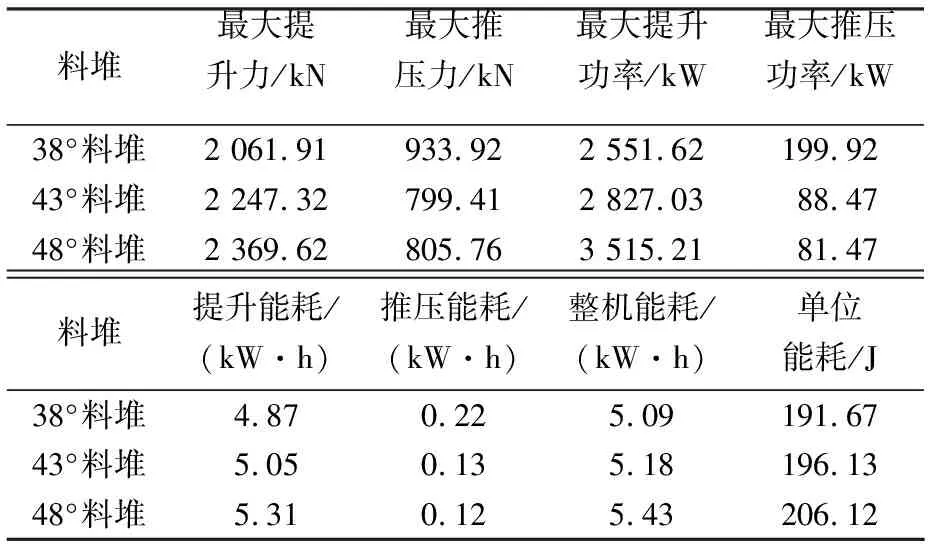
表4 最優控制下作業性能
綜合分析表3和4中數據可以發現,對于任意料堆,都有一條最優挖掘軌跡,可以保證挖掘能耗最低.根據測試結果,正在服役的WK-55挖掘機挖掘料堆角分別為38°、43°、48°的料堆的平均單位能耗為232.71 J/kg,而在使用挖掘軌跡規劃時的挖掘能耗為197.97 J/kg,降低了14.9%,挖掘能耗有效降低.
同時,軌跡規劃下的電機速度保持平穩變化,與正在服役的挖掘機電機運行速度相比,其電機速度明顯減小,大大降低了對電機的設計要求,如圖12所示.
此外,軌跡規劃方法可以有效減小挖掘阻力,與此同時,相比于手動控制,軌跡規劃下的挖掘軌跡既能保證滿斗率又能避免挖掘過程中的沖擊振動,使電機的力矩變化更加平穩,降低了故障率.
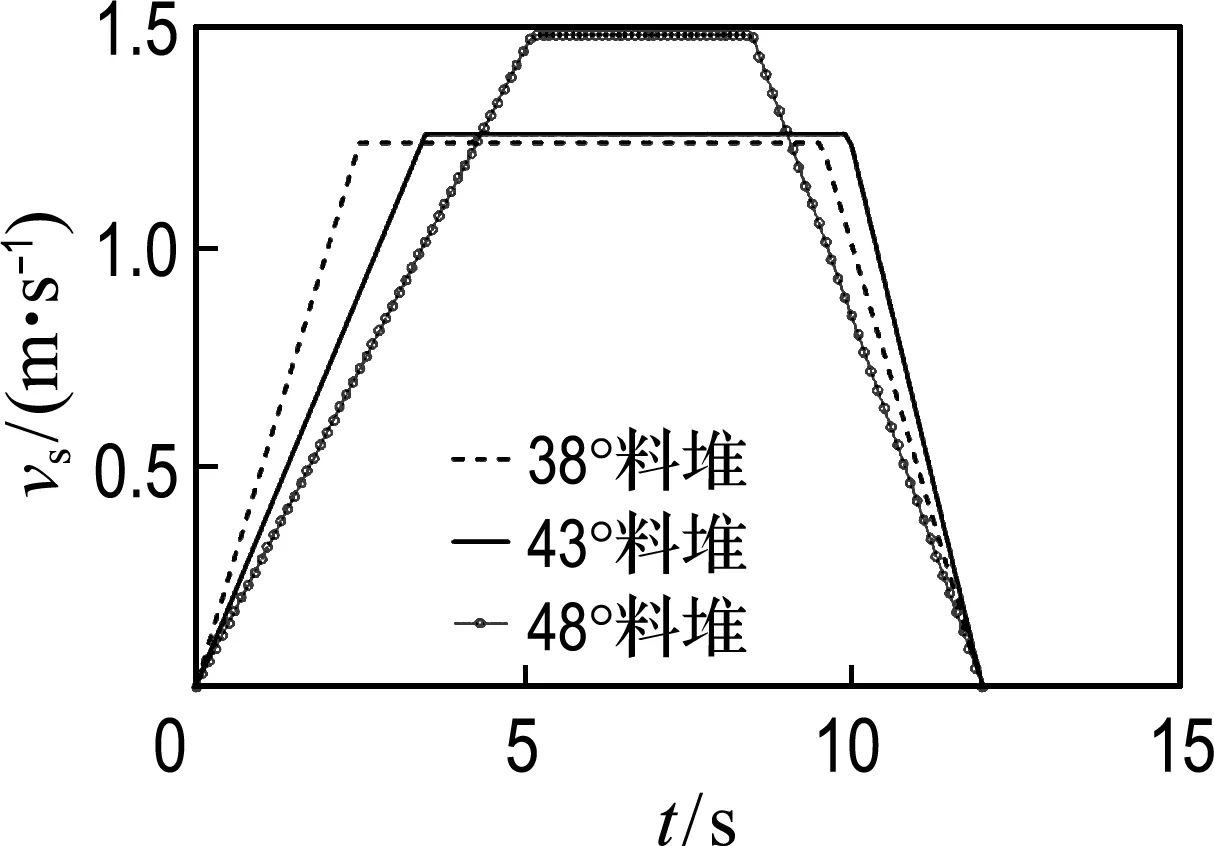
(a) 提升速度
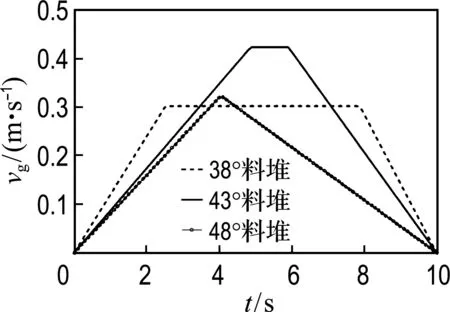
(b) 推壓速度
(c) 38°料堆挖掘軌跡
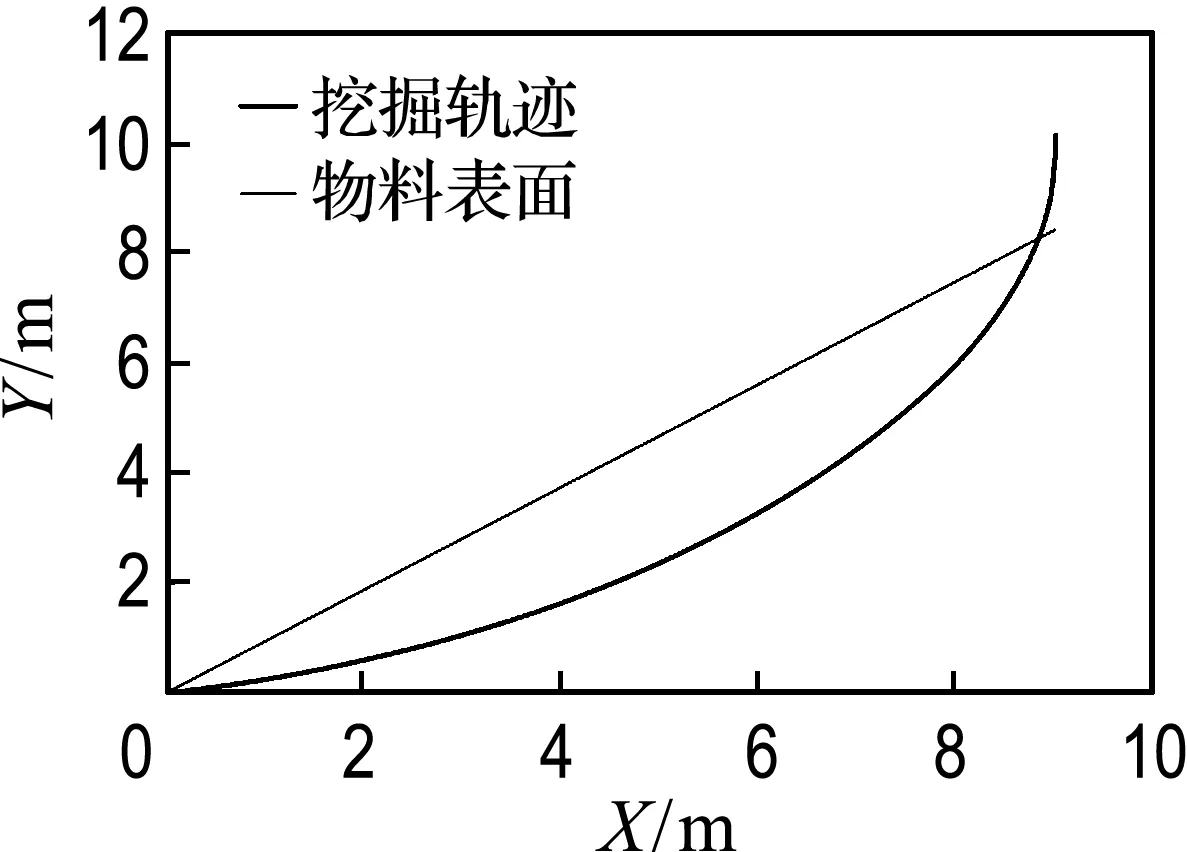
(d) 43°料堆挖掘軌跡
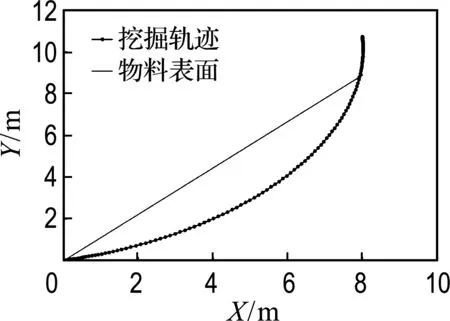
(e) 48°料堆挖掘軌跡
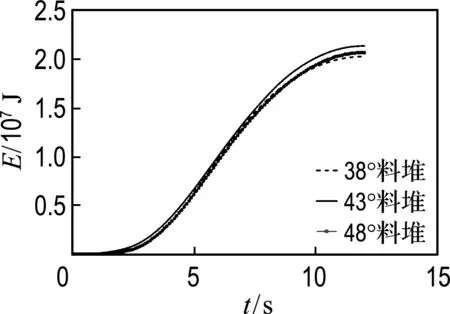
(f) 3種料堆形狀的挖掘能耗
圖12 軌跡規劃下的速度、軌跡、能耗曲線
Fig.12 The curves of speed,trajectory,energy consumption of trajectory programming
4 結 論
(1)在McKyes機-土靜力平衡方程阻力計算模型的基礎上,綜合考慮物料的重力、鏟斗與物料間的摩擦力、速度和鏟斗兩側物料對挖掘阻力的影響,構建了一種新的動態挖掘阻力預測模型,并在此基礎上給出了挖掘機挖掘工作過程中的能耗計算方法.
(2)以實現挖掘機的智能化、工作裝置軌跡控制的自動化為目的,在綜合考慮結構和性能的基礎上,以料堆角為38°、43°、48°的料堆為例進行了控制參數優化,在保證挖掘效率的前提下,降低了挖掘能耗,實現了在智能挖掘機連續作業過程中,根據不同的料堆形狀實時調整挖掘軌跡的功能,為智能挖掘機的研發提供了理論指導.
(3)在設定約束條件時,根據現役挖掘機的單次挖掘時間,將優化過程中的挖掘機完成單次完整挖掘的時間設置為定值.在后續的研究中,可以針對挖掘時間和挖掘能量同時進行優化,并用多種曲線形式擬合電機速度曲線[16],以得到時間和能量最優的挖掘機最優控制參數.
[1] 賀繼林,趙 鑫,張大慶,等. 新型智能挖掘機自動軌跡控制研究[J]. 廣西大學學報(自然科學版), 2012(2):259-265.
HE Jilin, ZHAO Xin, ZHANG Daqing,etal. Trajectory control of new intelligent excavator [J].JournalofGuangxiUniversity(NaturalScienceEdition), 2012(2):259-265. (in Chinese)
[2] 邵 輝,胡偉石,羅繼亮,等. 自動挖掘機的動作規劃[J]. 控制工程, 2012,19(4):594-597.
SHAO Hui, HU Weishi, LUO Jiliang,etal. Action planning of automatic excavator [J].ControlEngineeringofChina, 2012,19(4):594-597. (in Chinese)
[3] 劉心昊,張大慶,趙喻明,等. 一種新型智能挖掘機的設計與實現[J]. 建筑機械, 2010(9):100-102.
LIU Xinhao, ZHANG Daqing, ZHAO Yuming,etal. Design and realization of a novel intelligent excavator [J].ConstructionMachinery, 2010(9):100-102. (in Chinese)
[4] 譚 琛,宋偉奇. 液壓挖掘機智能化設計研究[J]. 液壓與氣動, 2016(9):38-43.
TAN Chen, SONG Weiqi. Intelligent design and research of hydraulic excavator [J].ChineseHydraulics&Pneumatics, 2016(9):38-43. (in Chinese)
[5] 申立軍. 機械式挖掘機工作裝置機構性能研究與優化設計平臺研發[D]. 長春:吉林大學, 2013.
SHEN Lijun. Study on performance and development of optimization design software of mechanical mining shovel mechanism [D]. Changchun: Jilin University, 2013. (in Chinese)
[6] WEI Baochen, GAO Feng. Digging trajectory optimization for a new excavating mechanism of electric mining shovel [C] //ProceedingsoftheASMEDesignEngineeringTechnicalConference. New York: American Society of Mechanical Engineers, 2012: 1033-1039.
[7] AWUAH-OFFEI K, FRIMPONG S. Cable shovel digging optimization for energy efficiency [J].MechanismandMachineTheory, 2007,42(7):995-1006.
[8] 徐弓岳,丁華鋒,孫玉玉. 基于改進非支配排序遺傳算法的正鏟挖掘機工作裝置優化設計[J]. 機械工程學報, 2016,52(21):35-43.
XU Gongyue, DING Huafeng, SUN Yuyu. Optimization of face-shovel excavator′s attachment based on improved NSGA-II [J].JournalofMechanicalEngineering, 2016,52(21):35-43. (in Chinese)
[9] MCKYES E, ALI O S. Cutting of soil by narrow blades [J].JournalofTerramechanics, 1977,14(2):43-58.
[10] MCKYES E. Calculation of draft forces and soil failure boundaries of narrow cutting blades [J].TransactionsoftheAmericanSocietyofAgriculturalEngineers, 1978,21(1):20-24.
[11] SWICK W C, PERUMPRAL J V. A model for predicting soil-tool interaction [J].JournalofTerramechanics, 1988,25(1):43-56.
[12] MCKYES E. Soil cutting and tillage [M] //DevelopmentsinAgriculturalEngineering7. Amsterdam: Elsevier, 1985.
[13] FRIMPONG S, LI Ying. Stress loading of the cable shovel boom under in-situ digging conditions [J].EngineeringFailureAnalysis, 2007,14(4):702-715.
[14] 張衛國,權 龍,程 珩,等. 基于真實載荷的挖掘機工作裝置瞬態動力學分析[J]. 機械工程學報, 2011,47(12):144-149.
ZHANG Weiguo, QUAN Long, CHENG Hang,etal. Transient dynamic analysis on working device of excavator based on practical load [J].JournalofMechanicalEngineering, 2011,47(12):144-149. (in Chinese)
[15] 閻書文. 機械式挖掘機設計[M]. 北京:機械工業出版社, 1982:1-24.
YAN Shuwen.MechanicalExcavatorDesign[M]. Beijing: China Machine Press, 1982:1-24. (in Chinese)
[16] SONG Xueguan, LV Liye, LI Jieling,etal. An advanced and robust ensemble surrogate model:extended adaptive hybrid functions [J].JournalofMechanicalDesign,TransactionsoftheASME, 2018,140(4):041402.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
