基于模糊GO法的慣性導航系統可靠性研究
2018-05-30 01:05:13王海朋,段富海*,江秀紅
大連理工大學學報 2018年3期
王 海 朋, 段 富 海*, 江 秀 紅
( 1.大連理工大學 機械工程學院, 遼寧 大連 116024;2.沈陽航空航天大學 電子信息工程學院, 遼寧 沈陽 110136 )
0 引 言
在國防高可靠性領域,武器裝備的可靠性一直受到高度重視.平臺慣性導航系統(inertial navigation system,INS)是復雜高可靠性機電一體化系統.近年來由于INS數據錯誤和功能失效而引起的事故時常發生,因此對作為運載體主信號源的INS可靠性評價尤為重要.INS可靠性分析主要存在的問題是[1]:①裝在飛機、導彈、通信衛星等運載體上的INS是典型小子樣系統,其可靠性試驗周期長且代價昂貴,現場試驗數據少,很難獲取元件精確的失效數據;②INS可靠性存在一定的不確定性,如故障發生機理和故障模式復雜多變,部件和分系統對系統可靠性影響不確定等;③傳統可靠性模型缺乏自適應修正能力.因此急需尋求一種有效的不確定性INS的可靠性分析方法.
GO法(goal-oriented methodology)是一種有效的復雜系統可靠性分析方法[2],特別適合有電流、氣流、液流等實際物流產生的多狀態復雜系統可靠性分析[3].如樊冬明等[4]建立了基于動態貝葉斯網絡的可修GO法模型,并通過核電站高壓注水系統驗證了所提模型的有效性;江秀紅等[5]提出了一種基于GO法的INS預測維修平臺設計方法;陳潔等[6]提出了貝葉斯GO法,并對深水關井作業進行了可靠性分析.傳統GO法的系統可靠性分析假設元件存在2種或3種狀態,其狀態概率值精確可知.因此傳統GO法用精確值描述元件的各狀態概率,不能反映出真實情況,會降低系統可靠性分析結果的可信度.
模糊可靠性理論是處理可靠性工程中不精確和不確定性問題的一種新方法[7],利用模糊數學在處理不確定性信息方面的優勢,使復雜系統可靠性和安全性評估結果更真實可信.如文獻[8-9]將零部件的失效概率模糊化,提出了一種基于模糊理論的故障樹算法,并應用到工程系統的可靠性評估中;文獻[10-11]將事件發生的成功概率用三角模糊數表示,提出了基于三角模糊數的GO法,但均不適用于評估多狀態元件和系統的可靠性.文獻[12]將工程變量處理為隨機變量和模糊變量,提出了一種可綜合處理模糊不確定信息和隨機不確定信息的可靠度計算模型;文獻[13]將具有危害性事件發生的可能性和嚴重程度模糊化,提出了一種基于模糊理論的風險評估方法.
針對傳統GO法的不足,本文引入三角模糊數和擴展原理分別對輸入、輸出數據的模糊不確定性進行量化,提出一種模糊數學理論與GO可靠性模型相結合的多狀態系統可靠性分析方法——模糊GO法,并將其應用到INS可靠性研究中.
1 數據的模糊算法
1.1 模糊集合的截集

1.2 數據的三角模糊數轉化方法
三角模糊數是最常見的模糊數之一,具有計算簡單、表達直觀等優點,廣泛用于解決可靠性領域中模糊不確定性問題[14-15].為描述某事件發生的模糊不確定性,將某事件發生概率的精確值處理為可進行模糊化運算的三角模糊數,用式(1)方法進行模糊化處理,構造三角模糊數(l,m,h):
l=p·(1-Ef),m=p,h=p·(1+Ef)
(1)
式中:l、m、h分別為事件發生的最小可能值、最可能值、最大可能值;p為事件發生的概率;Ef為誤差因子,可根據實際工況和領域專家經驗選取.
1.3 擴展原理和參數規劃

(2)

(3)

下邊界:
(4a)
上邊界:
(4b)
2 基于模糊GO法的可靠性分析原理
GO法是一種以成功為導向的圖形化系統可靠性分析方法[18].模糊GO法是將模糊集合理論與GO可靠性模型相結合,引入三角模糊數和擴展原理對輸入、輸出數據的模糊不確定性進行量化,其可靠性分析原理如圖1所示,步驟如下:
(1)分析系統的基本原理,明確各元件、子系統的邏輯結構;
(2)根據單元功能和單元輸入、輸出信號之間的邏輯關系確定對應單元的操作符類型[2];
(3)根據系統物流邏輯上的進程,用信號流連接各操作符,生成GO圖;
(4)從輸入操作符開始,按照各操作符的運算規則,沿著信號流,得到系統的輸出狀態及狀態概率表達式;
(5)采用式(1)的處理方法,將元件各狀態發生概率的精確值轉化為三角模糊數,得到元件各狀態的模糊可靠性數據;
(6)用擴展原理將系統的輸出狀態概率表示為一個新的模糊數,按步驟(5)得到的三角模糊數作為擴展原理的輸入變量,按步驟(4)得到的狀態概率表達式作為擴展原理的模糊映射關系,用參數規劃方法得到直觀的系統模糊狀態概率隸屬度函數,據此對系統做出可靠性分析與評價.
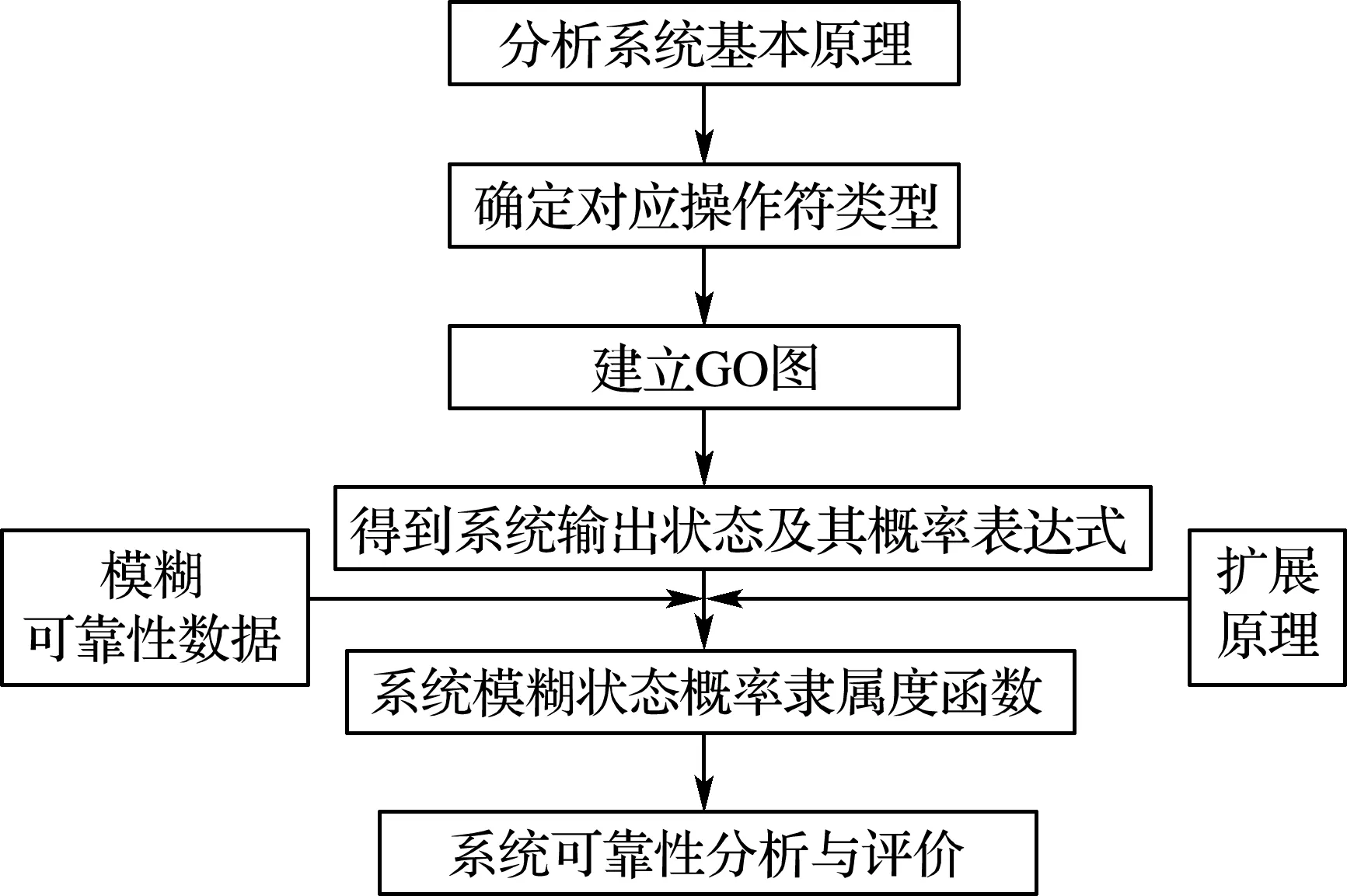
圖1 模糊GO法可靠性分析原理Fig.1 Reliability analysis principle of fuzzy GO methodology
3 INS的模糊GO法可靠性評價
3.1 系統分析及GO圖建立
為驗證模糊GO法的有效性,選用平臺慣性導航系統(INS)進行可靠性分析研究.某三軸INS基本結構原理圖如圖2所示,主要組成:①1個三軸慣導平臺;②3個高精度加速度計;③3個高精度陀螺儀;④穩定回路,包括前置放大器、數字控制器、功率驅動和力矩電機等;⑤3個旋轉變壓器;⑥導航計算機;⑦控制顯示器;⑧電源等.
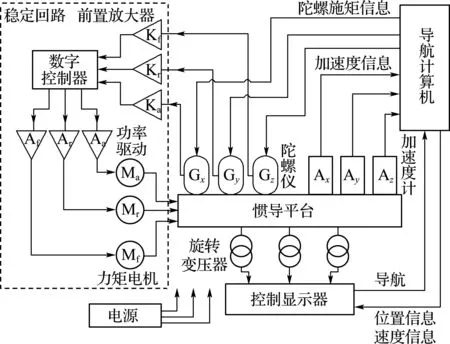
圖2 某三軸INS基本框圖Fig.2 Basic structure schematic of some three-axis INS
根據圖2建立INS的GO圖,如圖3所示.GO圖中共有29個操作符和29個信號流,其中操作符代表具體元件,信號流代表具體物流.電源是INS的唯一輸入單元,可用類型5操作符(單信號發生器)模擬;陀螺儀、加速度計會由于熱沖擊、電磁輻射等一些不恰當的動作或不期望的外界刺激產生提前輸出,可用類型3操作符(觸發發生器)模擬;力矩電機可能因電機線路短路等原因出現提前啟動的情況,也可用類型3操作符(觸發發生器)模擬;前置放大器、數字控制器、功率驅動、慣導平臺、旋轉變壓器、導航計算機及控制顯示器都假定為兩種狀態單元,可用類型1操作符(兩狀態單元)模擬.數字控制器只有同時收到3個前置放大器輸出的正確角速度信號,才向功率驅動電路發出有效信號,因此可用類型10操作符(與門)來模擬3個前置放大器之間的邏輯關系.同理,加速度計、力矩電機及旋轉變壓器輸出之間的邏輯關系也可用類型10操作符來模擬.INS各操作符類型、代表的單元及各元件的模糊狀態概率(以三角模糊數形式表示)如表1所示.
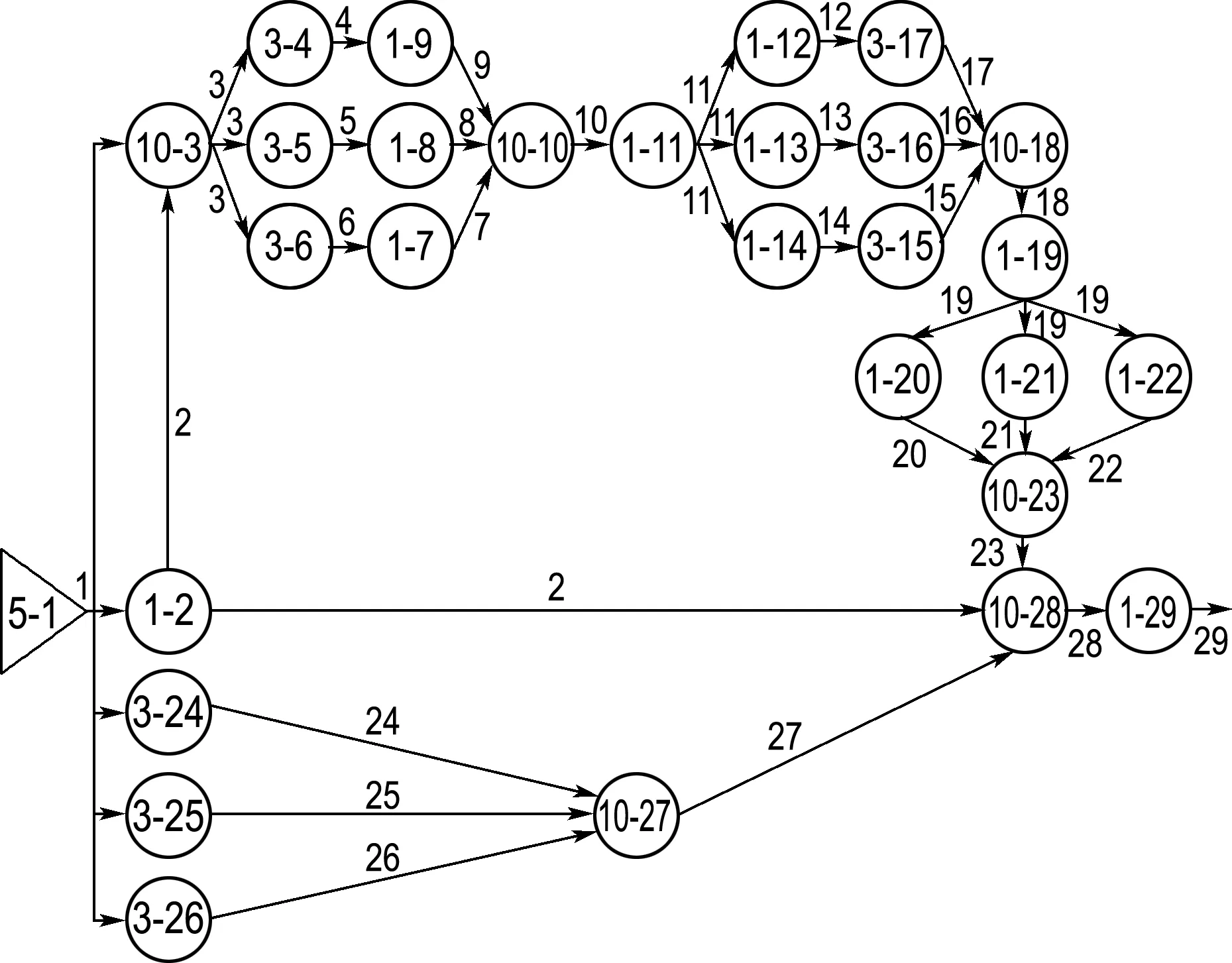
圖3 某三軸INS的GO圖Fig.3 GO figure of some three-axis INS
3.2 模糊GO運算
若GO圖中存在某信號連接到兩個或多個操作符的情況,則該信號定義為共有信號[2].由圖3可知,信號流1、2、3、11、19均為共有信號.由于包含同一共有信號流的信號流之間并不是完全獨立的,在定量計算系統狀態概率時,需對含有共有信號的信號流進行修正.在用概率公式算法計算時,將含有共有信號的各狀態概率表達式展開,把共有信號的高次項修正為一次項,修正后的各狀態概率表達式表示正確的狀態概率[2],修正后的關鍵信號流表達式如下:
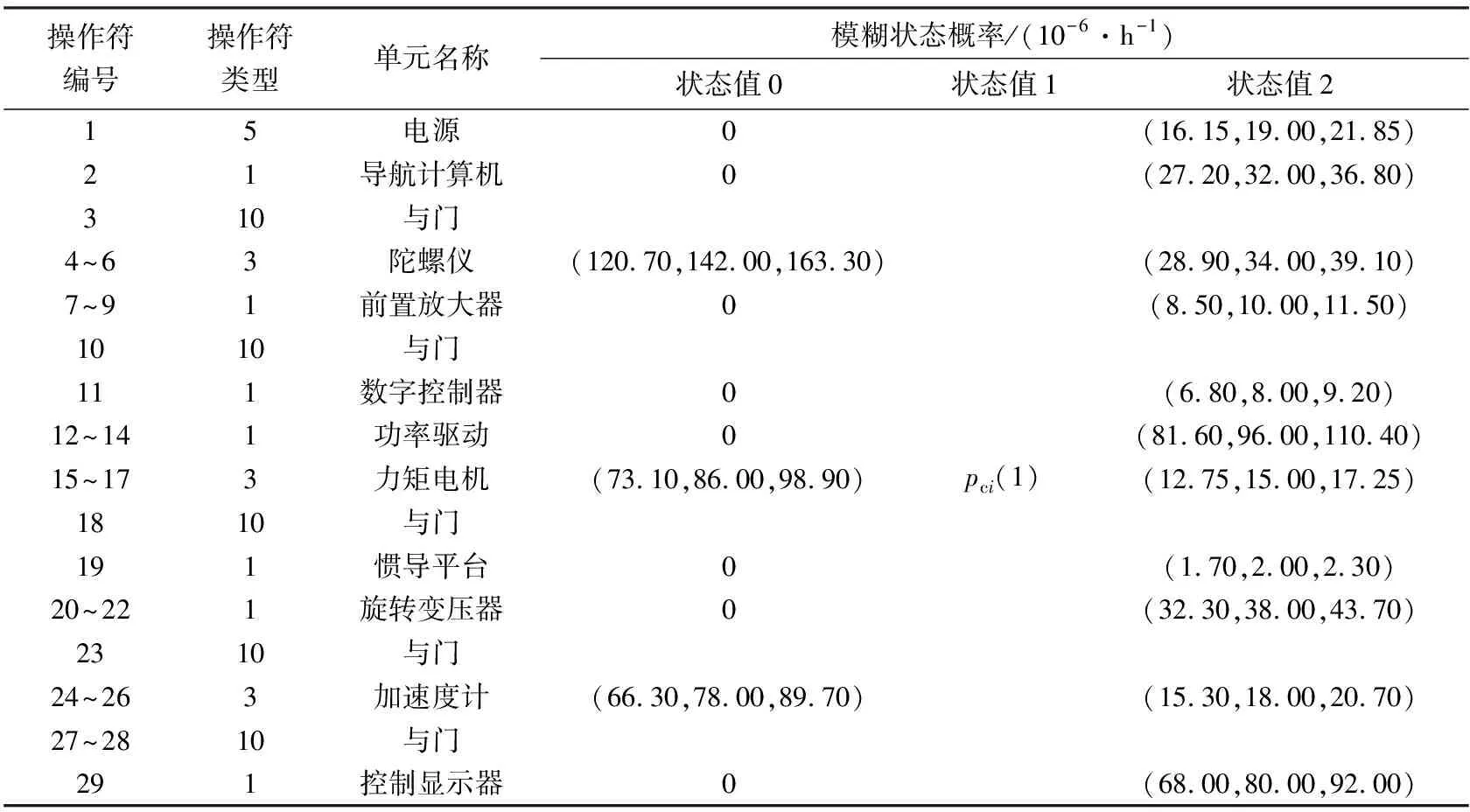
表1 GO操作符及相應的模糊狀態概率
信號流3
pr3(1)=Ar3(1)-Ar3(0);
pr3(0)=Ar3(0)=0
(5)
信號流10

pr10(1)=Ar10(1)-Ar10(0);
(6)
信號流18

3pc15(0)·(pc14(1)·pc15(1))2·As11(1);

3pc15(0)·(pc14(1)·pc15(1))2+
(pc14(1)·pc15(1))3)·As11(0);
pr18(1)=Ar18(1)-Ar18(0);
pr18(0)=Ar18(0)
(7)
信號流23
pr23(1)=Ar23(1)-Ar23(0);
pr23(0)=Ar23(0)
(8)
信號流27

pr27(1)=Ar27(1)-Ar27(0);
pr27(0)=Ar27(0)
(9)
信號流29
Ar29(1)=Ar28(1)·pc29(1);
Ar29(0)=Ar28(0)·pc29(1)=0;
pr29(1)=pr28(1)·pc29(1)=
As1(1)·(a27+b27)·pc29(1);
pr29(0)=pr28(0)·pc29(1)=0
(10)
其中

pc15(1))3+3pc15(0)·(pc14(1)·pc15(1))2,

Ari(j)表示輸出信號流i的狀態值從0到j的狀態累積概率;Asi(j)表示輸入信號流i的狀態值從0到j的狀態累積概率;pri(j)表示編號為i的信號流輸出狀態j的概率;a10、b10、a18、b18、a27、b27均與共有信號無關.
3.3 系統可靠性評價
由GO圖可知,信號流29所具有的可靠性特征量表征慣性導航系統的可靠性特性.式(10)中pr29(0)是系統輸出模糊狀態0的表達式,表征系統輸出提前信號的可靠性特性,由pr29(0)=0可知,INS不存在輸出提前狀態的情況.式(10)中pr29(1)是INS輸出模糊狀態1的表達式,表征系統輸出模糊成功信號的可靠性特性.根據表1中數據、系統輸出模糊狀態1的表達式及擴展原理,用參數規劃方法,借助Matlab可得出直觀的INS輸出模糊成功概率的隸屬度函數,如圖4所示.
由圖4知:INS輸出的模糊成功概率所有可能的取值均在由α=0所確定的區間[0.998 835 16,0.999 617 58],區間邊界值0.998 835 16 和0.999 617 58分別為INS輸出的模糊成功概率的最小可能值和最大可能值;0.999 226 30 為INS輸出的模糊成功概率的最可能值,對應于隸屬度α=1.0的結果.若將α-截集作為系統模糊區間的置信程度,由模糊集合的截集可知,α-截集的取值越小,系統可靠度的模糊區間越大,數據在模糊區間的離散度越大,分析結果的可信度越低;α-截集的取值越大,系統可靠度的模糊區間越小,數據在模糊區間離散度越小,可靠性分析結果的可信度越高.可從決策者偏好的角度取α=0.5,表示中立偏好(neutral attitude)可信,得系統可靠度的置信模糊區間為[0.999 030 71, 0.999 421 92].
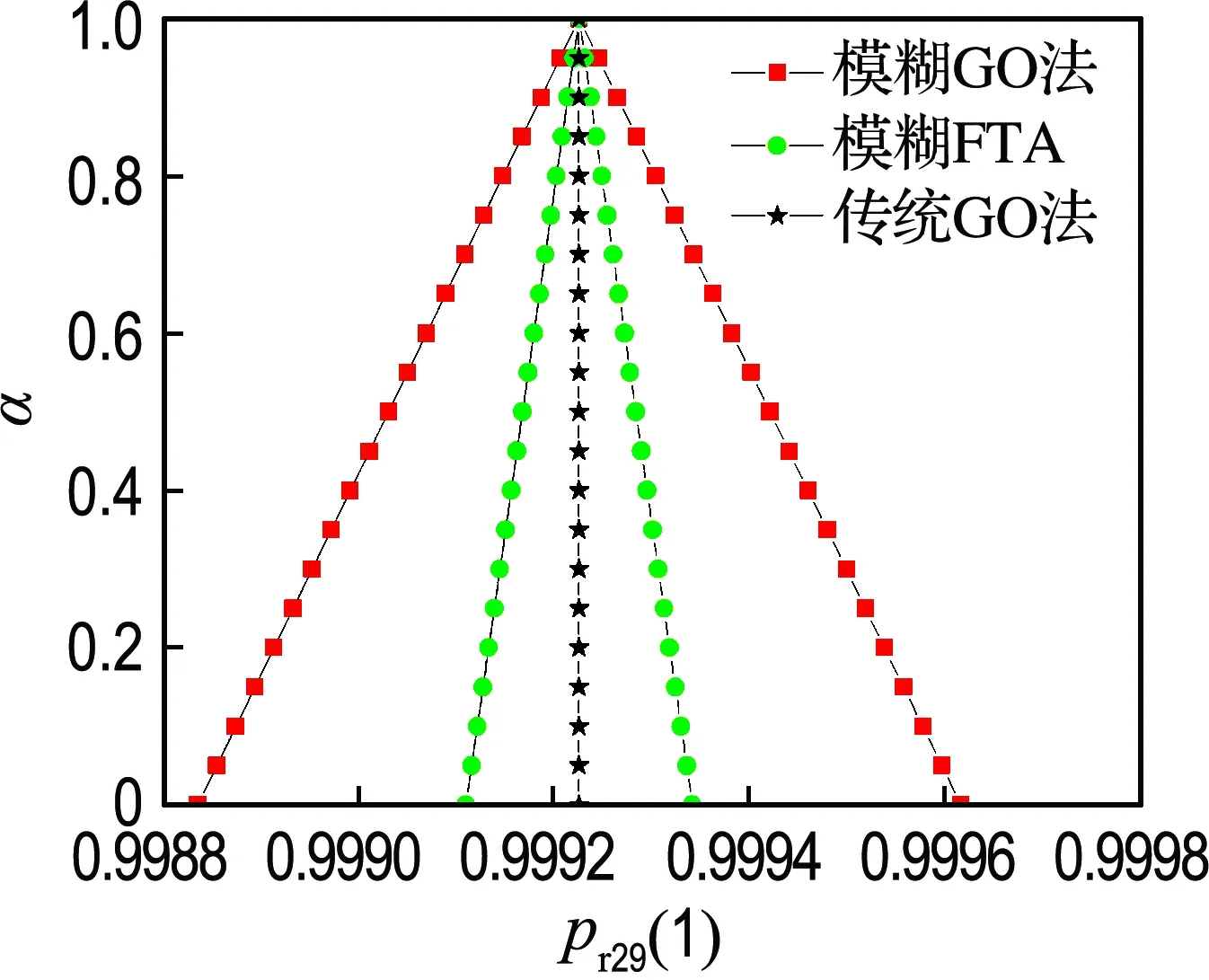
圖4 模糊成功概率的隸屬度函數Fig.4 Membership function of fuzzy successful probability
4 基于模糊FTA的INS可靠性分析
為驗證模糊GO法的有效性,采用文獻[19]提出的模糊FTA對INS進行可靠性分析,分析時假設:①各事件只存在成功和故障兩種狀態;②各事件相互獨立;③不考慮人為故障和誘發故障.以控制顯示器不能成功輸出姿態角和加速度信息為頂事件,建立故障樹,如圖5所示.
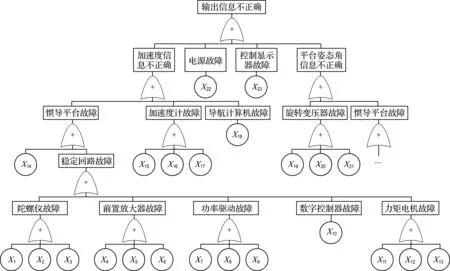
圖5 某三軸INS的FTA圖Fig.5 FTA figure of some three-axis INS
在FTA圖中以Xi表示各底事件,對底事件賦予模糊概率值,模糊數據見表2.由INS原理圖可知,任何一個元件故障都會導致頂事件發生,故該故障樹中的最小割集為{X1},…,{X23};由文獻[19]可知,該故障樹頂事件發生的概率為
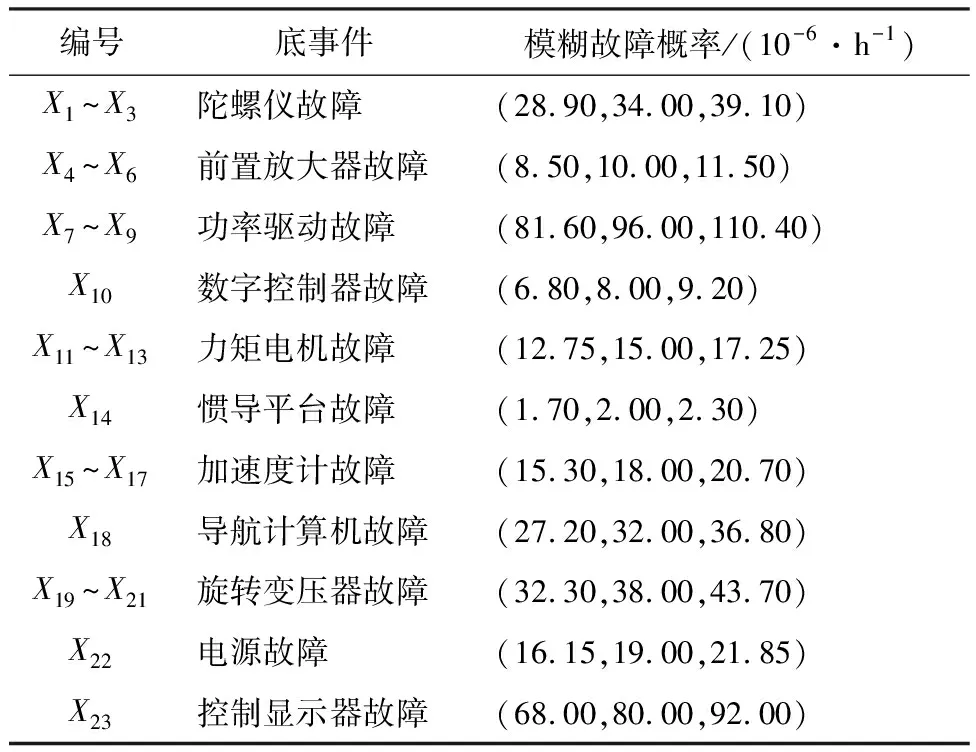
表2 底事件模糊數據

λ~=1-∏23i=1(1-λ~i)
(11)
式中:

5 3種可靠性分析方法對比
用模糊FTA、傳統GO法、模糊GO法分析INS系統的可靠性,得出直觀的INS輸出模糊成功概率的隸屬度函數如圖4所示,得出的不同截集水平下的系統可靠性指標見表3.
分析表3可知:
(1)用傳統GO法得到的系統可靠度,與當α=1.0時用模糊GO法得出的結果相同.因為當α=1.0時,用模糊GO法計算出的系統可靠度對應于當所有元件的狀態概率取精確值時得出的結果.
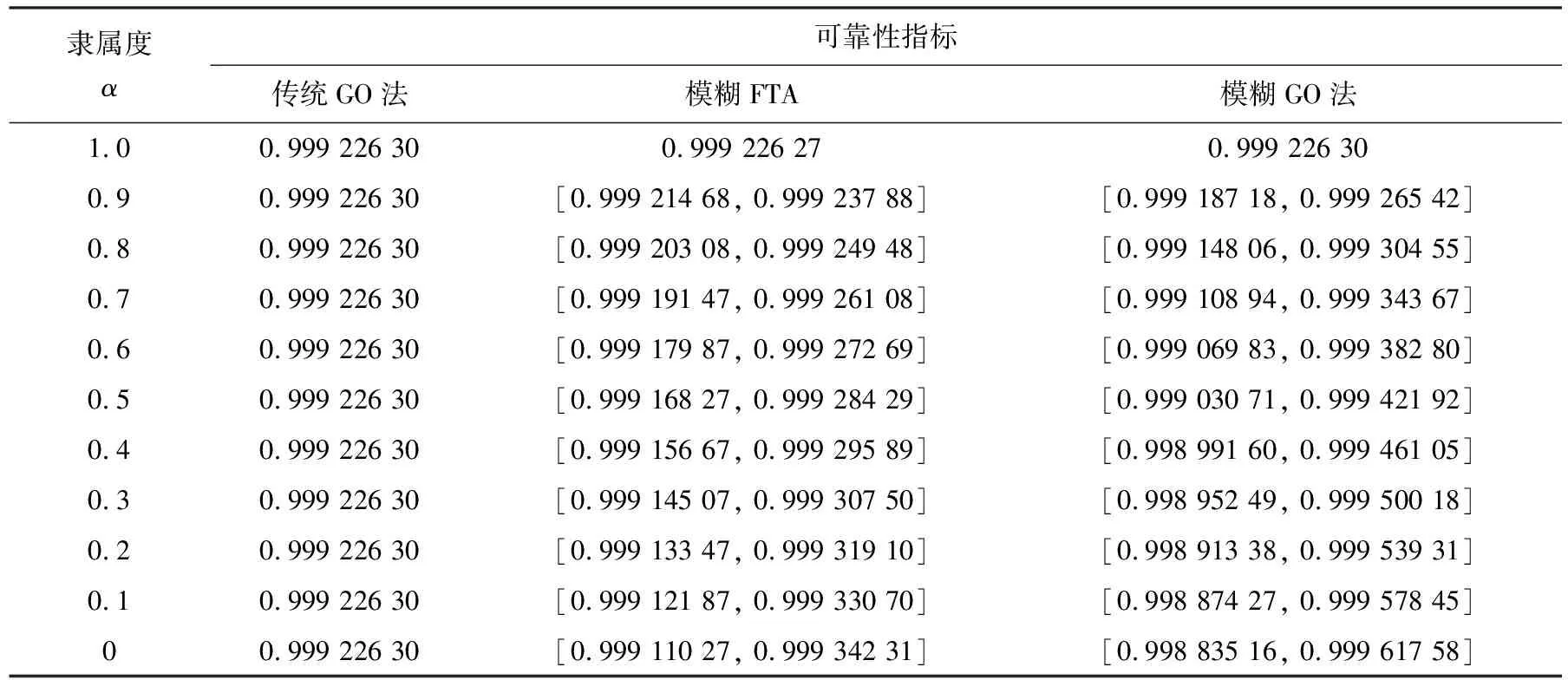
表3 3種分析方法得到的系統可靠性指標
(2)傳統GO法計算出的可靠度均在模糊GO法計算出的可靠度置信模糊區間內,這驗證了模糊GO法的有效性.
(3)用模糊FTA和模糊GO法得出不同截集水平的可靠度有差異.因為模糊FTA在建模時只考慮各底事件的成功和故障兩種狀態,而在GO法中還考慮到陀螺儀、加速度計及力矩電機可能存在的提前狀態.同樣驗證了本文所提方法的有效性,能夠有效評估多狀態元件和系統的可靠性.
(4)基于隸屬度函數的模糊區間能將元件和系統的不確定性量化,使得可靠性分析結果具有說服力.
6 結 論
(1)將模糊數學理論引入到基于GO法的系統可靠性分析中,提出了一種模糊不確定性系統可靠性分析方法——模糊GO法.用模糊數來描述元件的狀態概率值,可有效解決由于缺乏足夠的數據、統計的不確定性、建模的不確定性等因素而導致的概率不確定性問題;用擴展原理將系統的輸出狀態概率表示為一個新的模糊數,可得到不同截集水平下的可靠度置信模糊區間,將系統輸出的不確定性量化,能準確地分析系統的可靠性;運用參數規劃的方法可得到直觀的系統模糊狀態概率隸屬度函數,使得系統可靠性分析結果更加直觀,且方法思路清晰、簡潔方便.
(2)采用模糊GO法研究INS可靠性,經與傳統GO法和模糊FTA分析結果對比,驗證了模糊GO法有效,可作為一種復雜多態系統可靠性分析方法.
(3)模糊GO法克服了傳統GO法中各操作符只能根據元件歷史統計值給定一個精確值的不足,可為復雜系統的模糊不確定性分析提供有效且實用的分析工具,有較強的工程實用性.
[1] 馮 靜,潘正強,孫 權,等. 小子樣復雜系統可靠性信息融合方法及其應用[M]. 北京:科學出版社, 2015.
FENG Jing, PAN Zhengqiang, SUN Quan,etal.MethodsandApplicationsofReliabilityInformationFusionforComplexSystemwithSmallSampleTest[M]. Beijing: Science Press, 2015. (in Chinese)
[2] 沈祖培,黃祥瑞. GO法原理及應用:一種系統可靠性分析方法[M]. 北京:清華大學出版社, 2004.
SHEN Zupei, HUANG Xiangrui.PrincipleandApplicationofGOMethodology:ASystemReliabilityAnalysisMethodology[M]. Beijing: Tsinghua University Press, 2004. (in Chinese)
[3] 蘭 雪,段富海,桑 勇. GO-FLOW法在飛機EHA可靠性分析中的應用[J]. 北京航空航天大學學報, 2017,43(6):1264-1270.
LAN Xue, DUAN Fuhai, SANG Yong. Application of GO-FLOW methodology in reliability analysis of aircraft EHA [J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2017,43(6):1264-1270. (in Chinese)
[4] 樊冬明,任 羿,劉林林,等. 基于動態貝葉斯網絡的可修GO法模型算法[J]. 北京航空航天大學學報, 2015,41(11):2166-2176.
FAN Dongming, REN Yi, LIU Linlin,etal. Algorithm based-on dynamic Bayesian networks for repairable GO methodology model [J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2015,41(11):2166-2176. (in Chinese)
[5] 江秀紅,段富海,陳 璞,等. 基于GO法和RCM的慣性導航系統預測維修平臺設計[J]. 兵工學報, 2014,35(9):1443-1450.
JIANG Xiuhong, DUAN Fuhai, CHEN Pu,etal. Design of predictive maintenance platform for INS based on GO methodology and RCM [J].ActaArmamentarii, 2014,35(9):1443-1450. (in Chinese)
[6] 陳 潔,陳國明,李新宏,等. 深水關井作業可靠性貝葉斯-GO法分析[J]. 中國安全科學學報, 2016,26(4):144-149.
CHEN Jie, CHEN Guoming, LI Xinhong,etal. Reliability analysis of deep-water shut-in operation using Bayesian GO approach [J].ChinaSafetyScienceJournal, 2016,26(4):144-149. (in Chinese)
[7] 張 萌. 統一模糊可靠性模型理論研究及葉片抗振模糊可靠性評估建模[D]. 西安:西北工業大學, 2014.
ZHANG Meng. Theoretical study on the unified fuzzy reliability model and reliability assessment modeling of blades to avoid resonance [D]. Xi′an: Northwestern Polytechnical University, 2014. (in Chinese)
[8] BHARDWAJ R K, MALIK S C. Fuzzy reliability evaluation of a fire detector system [J].InternationalJournalofComputerApplications, 2012,43(3):41-46.
[9] LI Yanfeng, HUANG Hongzhong, LIU Yu,etal. A new fault tree analysis method:fuzzy dynamic fault tree analysis [J].EksploatacjaiNiezawodnosc-MaintenanceandReliability, 2012,14(3):208-214.
[10] 張根保,許 智,王國強,等. 基于模糊理論的GO法多時序可靠性分析研究[J]. 機械設計, 2010,27(11):15-18, 72.
ZHANG Genbao, XU Zhi, WANG Guoqiang,etal. Reliability analysis of GO method multi-temporal based on fuzzy theory [J].JournalofMachineDesign, 2010,27(11):15-18,72. (in Chinese)
[11] 張麗娜,李艷軍,張 建. 基于模糊GO法的飛機備件支援系統可靠性分析[J]. 科學技術與工程, 2017,17(4):105-109.
ZHANG Lina, LI Yanjun, ZHANG Jian. Research on reliability of aircraft spare parts support system based on fuzzy GO method [J].ScienceTechnologyandEngineering, 2017,17(4):105-109. (in Chinese)
[12] 李玲玲,武 猛,李志剛. 可靠性度量中的不確定信息處理[J]. 機械工程學報, 2012,48(8):153-158.
LI Lingling, WU Meng, LI Zhigang. Uncertain information processing method in the reliability measurement [J].JournalofMechanicalEngineering, 2012,48(8):153-158. (in Chinese)
[14] DING Y, LISNIANSKI A. Fuzzy universal generating functions for multi-state system reliability assessment [J].FuzzySetsandSystems, 2008,159(3):307-324.
[15] DING Y, ZUO M J, LISNIANSKI A,etal. Fuzzy multi-state systems: General definitions, and performance assessment [J].IEEETransactionsonReliability, 2008,57(4):589-594.
[16] ZADEH L A. Fuzzy sets [J].InformationandControl, 1965,8(3):338-353.
[17] ZADEH L A. Fuzzy sets as a basis for a theory of possibility [J].FuzzySetsandSystems, 1978,1(1):3-28.
[18] SHEN Zupei, GAO Jia, HUANG Xiangrui. An exact algorithm dealing with shared signals in the GO methodology [J].ReliabilityEngineeringandSystemSafety, 2001,73(2):177-181.
[19] WANG Daqing, ZHANG Peng, CHEN Liqiong. Fuzzy fault tree analysis for fire and explosion of crude oil tanks [J].JournalofLossPreventionintheProcessIndustries, 2013,26(6):1390-1398.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
