WLFMCW雷達(dá)旋翼轉(zhuǎn)速快速估計(jì)方法
2018-05-24 02:32:08,,,,
雷達(dá)科學(xué)與技術(shù) 2018年2期
, , , ,
(1.空軍預(yù)警學(xué)院, 湖北武漢 430019;2.中國人民解放軍93986部隊(duì), 新疆和田 848000)
0 引言
直升機(jī)的旋翼旋轉(zhuǎn)是引起微多普勒效應(yīng)的典型運(yùn)動(dòng),旋翼微動(dòng)信息中包含著旋翼的轉(zhuǎn)速信息,利用旋翼轉(zhuǎn)速可以對直升機(jī)一類目標(biāo)進(jìn)行識別,并且通過旋翼轉(zhuǎn)速估計(jì)可以實(shí)現(xiàn)旋翼類自旋目標(biāo)的ISAR成像。因此轉(zhuǎn)速估計(jì)已引起了眾多學(xué)者的關(guān)注和研究[1-4]。而寬帶線性調(diào)頻連續(xù)波(Wideband Linear Frequency Modulation Continuous Wave, WLFMCW)雷達(dá)具有體積小、重量輕、成本低、功耗低等優(yōu)勢,利用它對直升機(jī)目標(biāo)探測可以大大降低雷達(dá)設(shè)備的復(fù)雜度,有利于預(yù)警裝備的快速部署和使用。
WLFMCW雷達(dá)雖然有體制上的優(yōu)勢,但是很多方面異于脈沖體制。首先,WLFMCW雷達(dá)在整個(gè)周期內(nèi)都發(fā)射信號,旋翼目標(biāo)不能忽略脈沖內(nèi)的運(yùn)動(dòng),因此回波中引入了隨快時(shí)間變化的相位項(xiàng)。當(dāng)前脈沖體制雷達(dá)對旋翼轉(zhuǎn)速估計(jì)的主要方法有正交匹配追蹤算法、高階矩函數(shù)分析法、Hough變換法[1]、函數(shù)構(gòu)建法[2]和自相關(guān)法[3-4]。其中,正交匹配追蹤算法、高階矩函數(shù)分析法需要用到回波的相位信息,因此無法直接應(yīng)用到WLFMCW雷達(dá)中;Hough變換法存在著計(jì)算量大的問題,無法快速進(jìn)行轉(zhuǎn)速估計(jì);函數(shù)構(gòu)建法雖然計(jì)算量較小,但是在旋翼散射點(diǎn)均勻分布時(shí)會(huì)失效,難以準(zhǔn)確得到轉(zhuǎn)速值;自相關(guān)法必須在葉片個(gè)數(shù)已知的情況下才能準(zhǔn)確估計(jì)旋翼轉(zhuǎn)速。
綜上所述,需要研究一種新的用于WLFMCW雷達(dá)旋翼轉(zhuǎn)速快速估計(jì)方法。本文從特征曲線圖像域出發(fā),充分利用旋翼葉片個(gè)數(shù)的有限性,首先在自相關(guān)基礎(chǔ)上得到圖像周期,其次通過搜索葉片個(gè)數(shù)的方法求取相應(yīng)的轉(zhuǎn)速值,最后利用實(shí)數(shù)逆Radon變換(Real-Valued Inverse Radon Transform, RIRT)[5]對旋翼進(jìn)行搜索成像并記錄熵值,利用圖像最小熵思想來估計(jì)旋翼轉(zhuǎn)速。該方法運(yùn)算量小、方法簡便,對于目標(biāo)模型普適性強(qiáng)。搜索算法在硬件上可以實(shí)現(xiàn)并行處理,可實(shí)現(xiàn)旋翼轉(zhuǎn)速快速估計(jì),為目標(biāo)的快速識別奠定基礎(chǔ)。
1 WLFMCW雷達(dá)的直升機(jī)旋翼回波建模與特征分析
寬帶線性調(diào)頻連續(xù)波的微動(dòng)特征曲線會(huì)在頻率-慢時(shí)間域成“正弦”走動(dòng),通過對“正弦”曲線周期的分析可以提取出旋翼的轉(zhuǎn)速。下面先對直升機(jī)旋翼的回波進(jìn)行建模和特征分析。
1.1 直升機(jī)旋翼回波建模
在遠(yuǎn)場條件下,直升機(jī)回波平動(dòng)補(bǔ)償后,此時(shí)直升機(jī)可等效為懸停狀態(tài),如圖1(a)所示,設(shè)雷達(dá)到旋翼中心的距離為RC,方位角和俯仰角分別為α和β,旋翼以恒定的角速度ω=2πfrot繞旋翼中心旋轉(zhuǎn)(frot為旋翼旋轉(zhuǎn)頻率)。為了便于分析,考慮α=0°,β=0°的情況,即此時(shí)假設(shè)雷達(dá)、旋翼都投影到一個(gè)平面內(nèi),如圖1(b)所示。旋翼某一個(gè)葉片上的散射點(diǎn)P到旋翼中心的距離為r(0≤r≤l,l為葉片長度),P點(diǎn)到雷達(dá)的距離為RP,P點(diǎn)以角速度ω繞C旋轉(zhuǎn),初始時(shí)刻P點(diǎn)的初始旋轉(zhuǎn)角為θ。目標(biāo)的旋轉(zhuǎn)中心C點(diǎn)位于x軸上,其初始坐標(biāo)為(xC,0)。選取C為參考點(diǎn),那么Rref=RC。
若雷達(dá)發(fā)射鋸齒波調(diào)頻連續(xù)波信號,則WLFMCW雷達(dá)回波信號為
exp[j2π(fc(t-τp)+
(1)
參考信號為
exp[j2π(fc(t-τref)+

(2)

exp[Φ1+Φ2+Φ3+Φ4+Φ5+Φ6]
(3)
通過對式(3)中的相位項(xiàng)快時(shí)間微分,可得微多普勒信號的瞬時(shí)頻率[6-7]:

sin(ωtm+θ)+4πkRrefvr(tm)/c2
(4)
ψ=arctan[-kλ/(cω)]
式(4)中第一項(xiàng)為旋翼目標(biāo)旋轉(zhuǎn)引起的走動(dòng)項(xiàng),它隨慢時(shí)間變化,導(dǎo)致特征曲線在頻率-慢時(shí)間上出現(xiàn)“正弦”變化;第二項(xiàng)包含快時(shí)間,為主瓣展寬項(xiàng);第三項(xiàng)為速度-距離耦合項(xiàng),它導(dǎo)致主瓣位置的走動(dòng)。從結(jié)果可以看出,WLFMCW雷達(dá)的在頻率-慢時(shí)間域的曲線振幅會(huì)被放大,放大倍數(shù)為rP=(k2λ2+c2ω2)1/2/(kλ)[6-7]。
1.2 直升機(jī)旋翼特征曲線特征分析
通過上述分析可以得知,WLFMCW雷達(dá)微動(dòng)特征曲線在頻率-慢時(shí)間域以“正弦”規(guī)律變化。從式(4)可以看出,特征曲線周期與旋翼旋轉(zhuǎn)周期是相同的,因此可以通過利用微動(dòng)特征曲線提取出旋翼轉(zhuǎn)速。考慮到旋翼具有k個(gè)葉片,相鄰葉片之間存在著固定的夾角2π/k,因此相鄰葉片的特征曲線也存在2π/k的相位差。由此可知,理想狀態(tài)下旋翼回波特征曲線可以視為由單個(gè)葉片的回波在一個(gè)周期內(nèi)平移k次后經(jīng)疊加而形成的。圖2分別是三葉片和四葉片理論上的微動(dòng)特征曲線示意圖。
由圖2可知,圖像周期為T=2π/(ωk),而旋翼旋轉(zhuǎn)周期為Tr=2π/ω。因此真實(shí)的旋翼周期與圖像周期存在著整數(shù)倍的關(guān)系:Tr=kT。令ωmax=2π/T,ω=2π/Tr,對于旋翼轉(zhuǎn)速ω可表示為
ω=ωmax/k
(5)
從式(5)可知,旋翼轉(zhuǎn)速的估計(jì)需提取微動(dòng)特征曲線的周期以及估計(jì)旋翼葉片的個(gè)數(shù)。本文提出一種基于該原理的旋翼轉(zhuǎn)速快速估計(jì)方法。
2 旋翼轉(zhuǎn)速快速估計(jì)方法
該方法共分兩步進(jìn)行,第一步通過圖像骨架提取的方法估計(jì)出圖像周期,第二步在第一步基礎(chǔ)上通過最小熵思想,利用旋翼成像后的圖像熵信息來估計(jì)旋翼葉片個(gè)數(shù),最終通過旋翼轉(zhuǎn)速與圖像周期和葉片個(gè)數(shù)的關(guān)系估計(jì)旋翼轉(zhuǎn)速。
2.1 基于骨架特征曲線的圖像周期估計(jì)
首先用文獻(xiàn)[1,8]中的方法,對回波信號進(jìn)行預(yù)處理,將差頻信號在距離向上進(jìn)行傅里葉變換,得到頻率-慢時(shí)間域的特征曲線。在特征曲線的圖像上進(jìn)行降噪和平滑處理,消除奇點(diǎn)對估計(jì)的影響。然后將回波曲線進(jìn)行二值化處理,并提取特征曲線骨架[8]。此時(shí)的特征曲線是二值化后的灰度圖,該圖像矩陣中只包含“0”和“1”兩個(gè)值(“1”表示所提取出的骨架)。將骨架上點(diǎn)的位置全部記錄后,找出曲線的極值位置,提取出圖像周期T,從而可確定ωmax=2π/T。
2.2 基于圖像最小熵的葉片個(gè)數(shù)估計(jì)方法
第二步估計(jì)旋翼葉片個(gè)數(shù)。利用RIRT算法對旋翼進(jìn)行成像,得到旋翼圖像信息并計(jì)算圖像熵值,利用最小熵原理,搜索圖像熵值最小時(shí)對應(yīng)的葉片個(gè)數(shù),再通過式(5)計(jì)算得到真實(shí)的轉(zhuǎn)速。分析得知,如果對轉(zhuǎn)速進(jìn)行全域搜索,轉(zhuǎn)速估計(jì)所需計(jì)算量較大,搜索時(shí)間也將變長,這不利于目標(biāo)的快速識別。將轉(zhuǎn)速的估計(jì)問題轉(zhuǎn)化為對旋翼葉片個(gè)數(shù)的估計(jì)問題,可以大幅降低估計(jì)量。直升機(jī)的葉片個(gè)數(shù)通常為2~8個(gè),搜索次數(shù)僅為7次,相比于其他搜索方式,搜索葉片個(gè)數(shù)的方法可以使計(jì)算量大為降低。
從文獻(xiàn)[9]可知,逆Radon變換的表達(dá)式為
(6)
其中,在旋翼目標(biāo)回波模型中離散化為θ=ωtm=mωTp,ρ=nΔρ,n為距離向上的第n個(gè)采樣點(diǎn),共有N個(gè)采樣值。對時(shí)頻分布圖像而言,縱軸表示瞬時(shí)頻率:Δρ=1/Ta(Hz),Ta為信號積累時(shí)間。
成像完成后,假設(shè)圖像的表達(dá)式為P(n,m,k),它是關(guān)于旋翼葉片個(gè)數(shù)k的函數(shù)。圖像熵的表達(dá)式[2]為
entropy(k)=
(7)
估計(jì)最優(yōu)值為
(8)
因此可以得到旋翼轉(zhuǎn)速的估計(jì)表達(dá)式:
(9)
通過該方法可以快速估計(jì)出旋翼轉(zhuǎn)速并可以直接進(jìn)行成像,為下一步識別工作奠定基礎(chǔ)。快速轉(zhuǎn)速估計(jì)方法如圖3所示。
3 計(jì)算量分析
假設(shè)信號預(yù)處理結(jié)束時(shí)得到的維度是N×M的矩陣,其中N是快時(shí)間方向上的采樣點(diǎn)數(shù),M是慢時(shí)間上回波個(gè)數(shù)。本文轉(zhuǎn)速估計(jì)算法總共分為骨架圖像周期提取和葉片數(shù)估計(jì)兩步。對于第一步骨架圖像周期估計(jì),使用到了尋找極大值點(diǎn)的方法搜索峰值點(diǎn),此時(shí)的計(jì)算量為O(M-1)。
分析文獻(xiàn)[2]中的計(jì)算量,流程如圖4所示。
估計(jì)共分為兩步,第一步是構(gòu)建函數(shù)并用離散傅里葉變換進(jìn)行轉(zhuǎn)速粗估計(jì)。其中函數(shù)構(gòu)建是在頻率-慢時(shí)間域矩陣的基礎(chǔ)上對每一行快時(shí)間乘以相應(yīng)系數(shù)并求和,此時(shí)計(jì)算量為O(2N·M);接著對構(gòu)建出的函數(shù)進(jìn)行FFT變換,其計(jì)算量為O(Mlog2M),第一步總計(jì)算量為O(2I·M+Mlog2M)。第二步為相位補(bǔ)償搜索計(jì)算,假設(shè)需要搜索的相位個(gè)數(shù)為K,慢時(shí)間個(gè)數(shù)為M,那么對回波矩陣中所有點(diǎn)的位置需要乘以補(bǔ)償相位,并將對應(yīng)不同慢時(shí)間的矩陣相加,最后進(jìn)行旋翼轉(zhuǎn)速搜索,此時(shí)計(jì)算量為O(K·I·M2)。相比于第二步,第一步計(jì)算量可忽略不計(jì)。
對于Hough變換提取微動(dòng)參數(shù)方法,其計(jì)算量較大。假設(shè)在頻率-慢時(shí)間域中存在正弦曲線為
f=rcos(ωt+φ)
(10)
式(10)需要3個(gè)參數(shù)來加以描述,分別是幅度r、角速度ω和初相φ。使用Hough變換提取微動(dòng)參數(shù)時(shí)分別對3個(gè)參數(shù)進(jìn)行搜索[10]。其計(jì)算量為M·N·Rr·Rω·Rφ,其中Rr,Rω,Rφ分別是3種參數(shù)的搜索次數(shù),它們的大小與搜索范圍和搜索步長相關(guān)。可以看出,Hough變換的計(jì)算量遠(yuǎn)遠(yuǎn)大于本文方法和文獻(xiàn)[6]中的方法。
表1中,對比了這3種算法的運(yùn)算量。
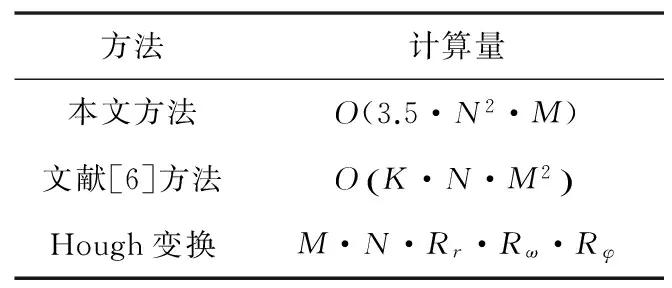
表1 運(yùn)算量對比表
從表1可以看出,本文相比于文獻(xiàn)[6]中方法的第一步運(yùn)算量很小,幾乎可以忽略不計(jì)。分析第二步運(yùn)算量,一般情況下N,M數(shù)值在同一數(shù)量級上,但是K的值要大于3.5倍,乃至數(shù)十倍。因此文獻(xiàn)[6]中的方法在第二步運(yùn)算量上大于本文方法,理論上本文方法計(jì)算量更小。與Hough變換法相比,本文方法計(jì)算量遠(yuǎn)遠(yuǎn)小于Hough變換計(jì)算量。并且散射點(diǎn)散射強(qiáng)度是否平穩(wěn)不會(huì)對本文方法產(chǎn)生影響,因此本文方法更具備普適性。由于本文在搜索時(shí)搜索次數(shù)較少,而且搜索結(jié)果互不影響,因此可以實(shí)現(xiàn)并行處理,更加提升了運(yùn)算速度。
4 仿真與分析
本文主要考慮旋翼數(shù)未知情況下的轉(zhuǎn)速估計(jì)問題,因此主要和同樣不需要知道旋翼個(gè)數(shù)的文獻(xiàn)[6]方法進(jìn)行比較;自相關(guān)算法需要已知旋翼個(gè)數(shù),本文不予比較。為綜合驗(yàn)證本文方法的有效性和適用性,這里設(shè)置兩組對比實(shí)驗(yàn):一是散射點(diǎn)散射強(qiáng)度平穩(wěn)時(shí)的轉(zhuǎn)速估計(jì),所有散射點(diǎn)的散射強(qiáng)度均為“1”;二是散射點(diǎn)散射強(qiáng)度非平穩(wěn)時(shí)的轉(zhuǎn)速估計(jì),其中散射點(diǎn)的散射強(qiáng)度隨機(jī)。旋翼散射點(diǎn)模型如圖5所示,分別對應(yīng)三葉片旋翼、四葉片旋翼和五葉片旋翼,同一葉片上的相鄰散射點(diǎn)間隔為1 m。
雷達(dá)參數(shù)如下:雷達(dá)載頻10 GHz,帶寬150 MHz,時(shí)寬2 ms,信噪比20 dB,觀測時(shí)間1 s。
仿真1 散射點(diǎn)強(qiáng)度平穩(wěn)時(shí)旋翼轉(zhuǎn)速估計(jì)
各類旋翼回波Dechirp后的頻率-慢時(shí)間曲線如圖6所示,為了便于觀察,取前0.5 s曲線進(jìn)行顯示。
圖6(a)~圖6(c)分別是三葉片、四葉片和五葉片模型在轉(zhuǎn)速為15π rad/s時(shí)的頻率-慢時(shí)間域圖像;圖6(d)~圖6(f)是這3種模型在轉(zhuǎn)速為20π rad/s時(shí)的頻率-慢時(shí)間域圖像。
對圖6曲線骨架提取后,得到骨架特征曲線如圖7所示。
圖7(a)~圖7(c)分別是三葉片、四葉片和五葉片模型在轉(zhuǎn)速為15π rad/s時(shí)的特征骨架曲線;圖7(d)~圖7(f)這3種模型在轉(zhuǎn)速為20π rad/s時(shí)的特征骨架曲線。
在特征曲線骨架基礎(chǔ)上,提取出不同葉片數(shù)對應(yīng)的旋翼最大轉(zhuǎn)速。將不同轉(zhuǎn)速代入式(6)中,對圖6進(jìn)行RIRT變換,而后通過式(7)計(jì)算相應(yīng)熵值,得到如圖8所示的熵值曲線。
通過搜索圖像熵值最低時(shí)對應(yīng)的葉片個(gè)數(shù),得到旋翼的葉片個(gè)數(shù),最后通過式(8)得到旋翼轉(zhuǎn)速。用該轉(zhuǎn)速進(jìn)行成像,得到的成像結(jié)果如圖9所示。
從圖9可以看出,在不同轉(zhuǎn)速下旋翼的成像結(jié)果所顯示的葉片長度有所變化,這與式(4)的分析是一致的。WLFMCW雷達(dá)幅度放大倍數(shù)為rP=(k2λ2+c2ω2)1/2/(kλ)。所以在轉(zhuǎn)速為15π rad/s的情況下,放大倍數(shù)為6.362 3,此時(shí)旋翼成像的半徑應(yīng)該為31.811 3 m;在轉(zhuǎn)速為20π rad/s的情況下,放大倍數(shù)為8.437 1,此時(shí)旋翼成像的半徑應(yīng)該為42.185 3 m。從圖中可以看出,理論與仿真結(jié)果是一致的。
在散射點(diǎn)散射強(qiáng)度相同的條件下,將本文方法與文獻(xiàn)[6]中的方法進(jìn)行對比,對比結(jié)果如表2所示。這里需要說明的是,由于計(jì)算機(jī)性能的限制,在Hough變換方法中對轉(zhuǎn)速的范圍進(jìn)行了限定,其取值范圍是[12π,22π]。
通過仿真可以發(fā)現(xiàn),當(dāng)旋翼散射點(diǎn)散射強(qiáng)度相同時(shí),文獻(xiàn)[6]的估計(jì)方法已經(jīng)失效。但本文方法仍可以準(zhǔn)確估計(jì)出旋翼轉(zhuǎn)速,說明本文方法在模型的適應(yīng)能力上更好。
仿真2 散射點(diǎn)散射強(qiáng)度隨機(jī)時(shí)旋翼轉(zhuǎn)速估計(jì)
圖10(a)~圖10(c)分別是三葉片、四葉片和五葉片模型在轉(zhuǎn)速為15π rad/s時(shí)的頻率-慢時(shí)間域圖像;圖10(d)~圖10(f)是這3種模型在轉(zhuǎn)速為20π rad/s時(shí)的頻率-慢時(shí)間域圖像。
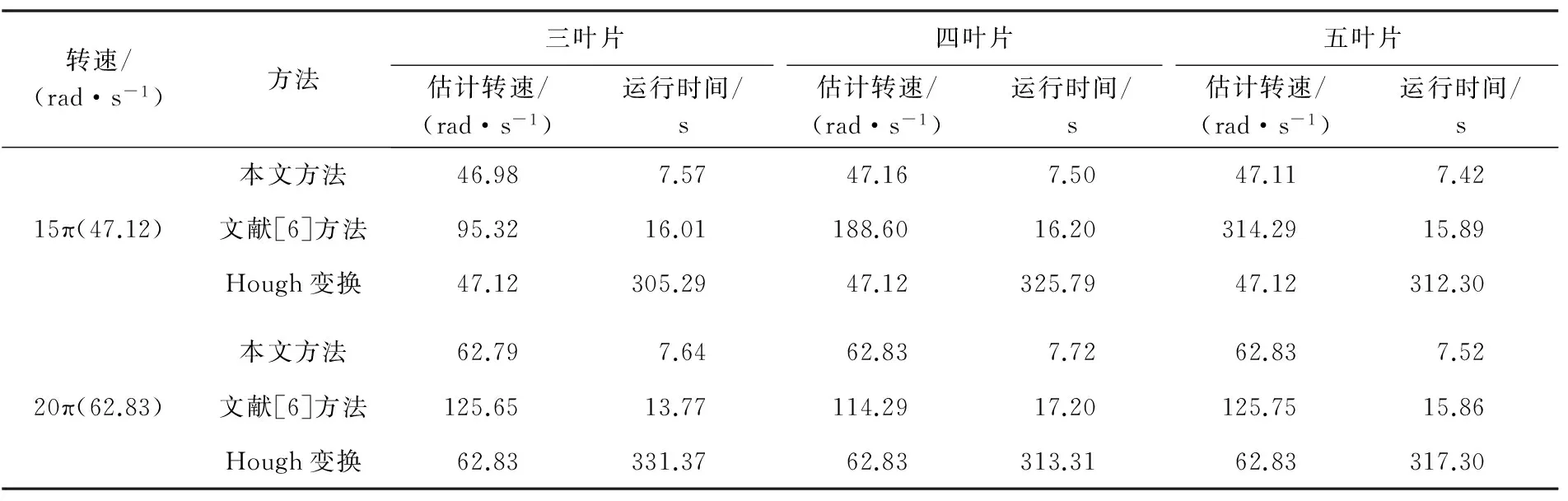
表2 散射點(diǎn)散射強(qiáng)度相同時(shí)旋翼轉(zhuǎn)速估計(jì)
圖11(a)~圖11(c)分別是三葉片、四葉片和五葉片模型在轉(zhuǎn)速為15π rad/s時(shí)的特征骨架曲線;圖11(d)~圖11(f)是這3種模型在轉(zhuǎn)速為20π rad/s時(shí)的特征骨架曲線。
圖12(a)~圖12(c)為不同葉片數(shù)旋翼的圖像值曲線,通過最小熵原理可以估計(jì)出旋翼的葉片個(gè)數(shù),進(jìn)而可以估計(jì)旋翼轉(zhuǎn)速。圖13(a)~圖13(c)是旋翼轉(zhuǎn)速為15π rad/s時(shí)三葉片、四葉片和五葉片旋翼的成像結(jié)果;圖13(d)~圖13(f)是旋翼轉(zhuǎn)速為20π rad/s時(shí)三葉片、四葉片和五葉片旋翼的成像結(jié)果。
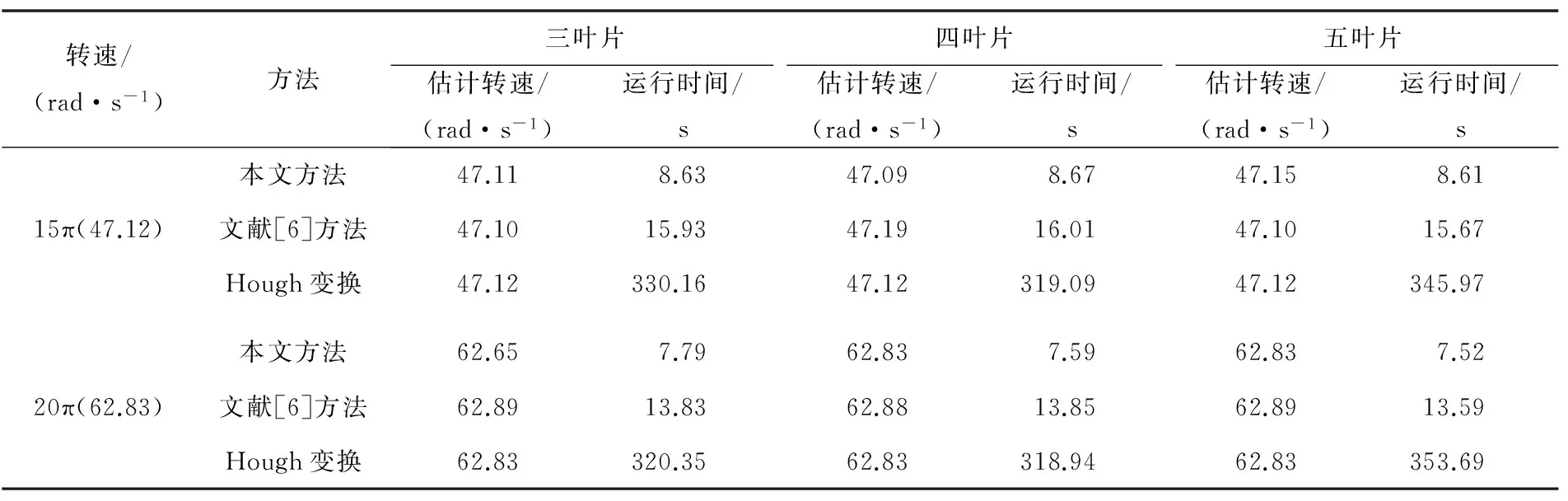
轉(zhuǎn)速/(rad·s-1)方法三葉片四葉片五葉片估計(jì)轉(zhuǎn)速/(rad·s-1)運(yùn)行時(shí)間/s估計(jì)轉(zhuǎn)速/(rad·s-1)運(yùn)行時(shí)間/s估計(jì)轉(zhuǎn)速/(rad·s-1)運(yùn)行時(shí)間/s15π(47.12)本文方法47.118.6347.098.6747.158.61文獻(xiàn)[6]方法47.1015.9347.1916.0147.1015.67Hough變換47.12330.1647.12319.0947.12345.9720π(62.83)本文方法62.657.7962.837.5962.837.52文獻(xiàn)[6]方法62.8913.8362.8813.8562.8913.59Hough變換62.83320.3562.83318.9462.83353.69
通過表3可以看出,在散射點(diǎn)散射強(qiáng)度不同的條件下,旋翼轉(zhuǎn)速通過文獻(xiàn)[6]的方法可以估計(jì)出來。兩種方法估計(jì)精度相近,但本文方法運(yùn)行速度更快、所需時(shí)間更少。通過以上兩種情況的對比,說明了本文方法在保證估計(jì)精度的基礎(chǔ)上具有更好普適性和小計(jì)算量的優(yōu)勢。
通過以上兩組仿真實(shí)驗(yàn)可以發(fā)現(xiàn),通過本文方法,可以對不同葉片個(gè)數(shù)的旋翼進(jìn)行較為精確的轉(zhuǎn)速估計(jì)和旋翼成像,在散射點(diǎn)散射強(qiáng)度平穩(wěn)和非平穩(wěn)的條件下本文方法都可進(jìn)行直升機(jī)旋翼轉(zhuǎn)速的估計(jì),驗(yàn)證了本文方法的有效性。
5 結(jié)束語
本文提出了一種基于骨架提取的旋翼轉(zhuǎn)速快速估計(jì)方法,通過提取骨架相鄰峰值的相位,得到旋翼轉(zhuǎn)速可能的最大值,接著對不同葉片個(gè)數(shù)進(jìn)行搜索成像,利用最小熵原理得到成像效果聚焦性最好的圖像,此時(shí)所對應(yīng)的轉(zhuǎn)速就是估計(jì)的最佳轉(zhuǎn)速。通過這個(gè)方法,可以快速估計(jì)出旋翼轉(zhuǎn)速,有效提升目標(biāo)識別的實(shí)時(shí)性。但是,該方法是基于骨架提取結(jié)果完成的,圖像域上的骨架提取容易受到噪聲影響,在低信噪比條件下該方法成像效果將下降甚至失效。下一步將就如何在低信噪比條件下快速估計(jì)進(jìn)行研究。
參考文獻(xiàn):
[1] 陳永彬,李少東,楊軍,等. 一種旋翼葉片微動(dòng)特征提取新方法[J]. 雷達(dá)科學(xué)與技術(shù), 2017,15(1):13-18.
CHEN Yongbin, LI Shaodong, YANG Jun, et al. A New Method for Micro-Motion Signature Extraction of Rotor Blades[J]. Radar Science and Technology, 2017,15(1):13-18. (in Chinese)
[2] 華煜明, 趙華, 郭軍海. 高速自旋目標(biāo)ISAR成像的代數(shù)重構(gòu)方法[J]. 雷達(dá)科學(xué)與技術(shù), 2016,14(2):134-139.
HUA Yuming, ZHAO Hua, GUO Junhai. Algebraic Iterative Imaging Method for Rapidly Rotating Target in ISAR[J]. Radar Science and Technology, 2016, 14(2):134-139. (in Chinese)
[3] 李靖卿,馮存前,賀思三,等. 利用微動(dòng)信息矩陣的彈道目標(biāo)特征提取方法[J]. 信號處理, 2016, 32(4):488-495.
[4] 陳永彬,李少東,楊軍,等. 旋翼葉片回波建模與閃爍現(xiàn)象機(jī)理分析[J]. 物理學(xué)報(bào), 2016, 65(13):281-291.
[5] 張群,羅迎. 雷達(dá)目標(biāo)微多普勒效應(yīng)[M]. 北京:國防工業(yè)出版社, 2013:47-82.
[6] 胡杰民,付耀文,胡志剛,等. 高速旋轉(zhuǎn)目標(biāo)旋轉(zhuǎn)速度估計(jì)方法[J]. 電子與信息學(xué)報(bào), 2009, 31(9):2069-2073.
[7] BAI Xueru, XING Mengdao, ZHOU Feng, et al. Imaging of Micromotion Targets with Rotating Parts Based on Empirical-Mode Decomposition[J]. IEEE Trans on Geoscience and Remote Sensing, 2008, 46(11):3514-3523.
[8] 李彥兵,張曦文,李飛,等. 一種大加速度機(jī)動(dòng)目標(biāo)微動(dòng)參數(shù)估計(jì)方法[J]. 電子與信息學(xué)報(bào), 2017, 39(1):82-87.
[9] 白雪茹. 空天目標(biāo)逆合成孔徑雷達(dá)成像新方法研究[D]. 西安:西安電子科技大學(xué), 2011.
[10] 梁穎,張群,何勁,等. 調(diào)頻連續(xù)波ISAR目標(biāo)微多普勒特征分析[J]. 現(xiàn)代防御技術(shù), 2011, 39(6):71-77.
[11] 梁穎,田韻,張群,等. 基于多項(xiàng)相位變換的FMCW-ISAR微多普勒特征提取方法[J]. 空軍工程大學(xué)學(xué)報(bào)(自然科學(xué)版), 2012, 13(2):74-78.
[12] 陳梁棟,李少東,陳文峰,等. LFMCW的旋翼目標(biāo)微動(dòng)特征提取方法研究[J]. 空軍預(yù)警學(xué)院學(xué)報(bào), 2016, 30(6):391-394.
[13] 李康樂,劉永祥,姜衛(wèi)東,等. 基于逆Radon變換的微動(dòng)目標(biāo)重構(gòu)研究[J]. 雷達(dá)科學(xué)與技術(shù), 2010, 8(1):74-79.
LI Kangle, LIU Yongxiang, JIANG Weidong, et al. Reconstruction of Target with Micro-Motions Based on Inverse Radon Transform[J]. Radar Science and Technology, 2010, 8(1):74-79. (in Chinese)
[14] 李傳中,鄧鈺棟,蘇衛(wèi)民,等. 面向像素的并行快速后向投影算法[J]. 南京理工大學(xué)學(xué)報(bào), 2014, 38(5):651-657.
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56