基于魯棒自適應反步法的四軸平臺穩定回路控制
2018-05-19 03:23:04王慎航張煥鑫林瑞仕楊名軍
航天控制 2018年2期
關鍵詞:系統
王慎航 張煥鑫 楊 軼 許 琦 林瑞仕 楊名軍
北京航天自動控制研究所,北京100854
三軸陀螺穩定平臺[1-3]作為導航、制導與控制技術中的關鍵慣性測量設備,已經廣泛應用于航天、航空和航海等領域。三軸陀螺穩定平臺框架[4]的“失鎖”現象導致它僅限用于機動姿態有限的載體上。若載體需要在全姿態狀態下工作,就必須采用四軸結構。三框架四軸平臺是在原來兩框架三軸平臺的基礎上,增加了一個隨動框架,即增加了一個自由度,以避免“失鎖”現象。
三框架四軸平臺[5-6]是一個多輸入、多輸出系統,包含了轉動慣量耦合、摩擦力矩、慣性耦合力矩、外部干擾、模型參數未知及不確定性等各類因素,這些都將影響穩定回路控制的動態性能和靜態性能。為了獲得穩定回路良好的魯棒性能和跟蹤性能,國內外學者在平臺穩定回路控制領域做了大量研究。PID[7-8]控制由于其控制算法簡單、魯棒性較好及易于實現等優點,廣泛應用于平臺穩定控制系統,但其對于系統干擾的抑制能力有限。干擾觀測器[9-11]也越來越多的應用于穩定回路的補償控制中,但這種算法的前提是系統的參數已知,但實際系統中總是存在參數未知和不確定性的情況。滑模變結構控制[12]由于對參數不確定性和干擾具有強抑制性能也被應用于穩定回路的控制中,但滑模變結構控制一般不可避免地存在“抖震”現象,將會導致系統的動態性能變差。還有其他一些方法,如:自抗擾控制[13]、H∞魯棒控制[14]、自適應控制[15]和最優控制[16]等方法,這些方法大多沒有考慮參數未知、不確定性或外部干擾的情況,不能保證系統良好的魯棒和跟蹤性能。
針對存在模型未知、不確定參數以及外界干擾項的平臺系統穩定回路,提出了一種魯棒自適應反步控制方法。
1 四軸穩定平臺數學模型
1.1 坐標系定義及運動學分析
如圖1所示,四軸平臺從外到內由外框、中框、內框和臺體4個框架組成,各坐標系定義為:OXbYbZb為與基座固聯的坐標系;OX3Y3Z3為與外框架固聯的坐標系,OY3為內框架軸;OX2Y2Z2為與中框架固聯的坐標系,OX2為中框架軸;OX1Y1Z1為與內框架固聯的坐標系,OY1為內框架軸;OXPYPZP為與臺體固聯的坐標系,OZP為臺體軸。
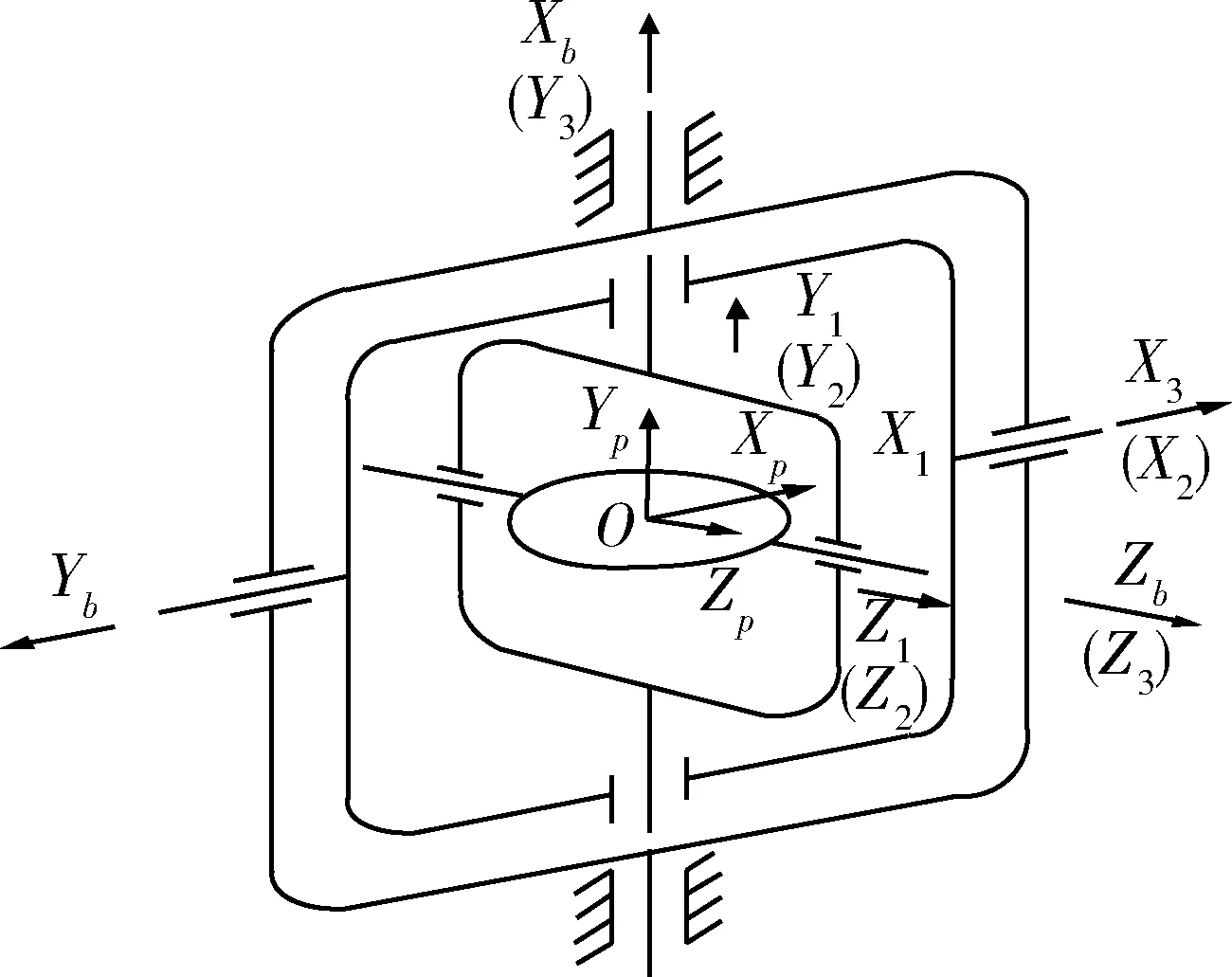
圖1 平臺框架與坐標系定義
(1)
其中,ωpx,ωpy,ωpz為臺體絕對角速度;ωbx,ωby,ωbz為載體絕對角速度;ω1x,ω1y,ω1z為內框架絕對角速度;ω2x,ω2y,ω2z為中框架絕對角速度;ω3x,ω3y,ω3z為外框架絕對角速度。轉換矩陣:
利用式(1)可迭代得到臺體角速度、框架角速度和載體角速度間的運動方程:
(2)

1.2 動力學模型[5]
三框架四軸平臺可看做外框架、中框架、內框架和臺體繞定點的旋轉運動,因此,可根據歐拉方程分別建立四軸的動力方程,也即分別建立臺體組合件、內框組合件、中框組合件和外框組合件方程。假設臺體組合件結構完全對稱,三軸主慣性矩相同,皆為Jp;內環的慣性矩為J1x=J1z=J1xz≠J1y;中環的慣性矩為J2x=J2y=J2xy≠J2z;外環的慣性矩為J3x,J3y,J3z。令Tp,T1,T2,T3分別為臺體軸、內框架軸、中框架軸及外框架軸上的力矩電動機驅動力矩;fp,f1,f2,f3分別為臺體軸、內框架軸、中框架軸及外框架軸上的干擾力矩,包括摩擦力矩、不平衡負載力矩等。根據參考文獻[5]得:
(3)
式中:
J3=J2xy+(J1y+Jp)cos2θy+J1xzsin2θy;
J4=J3x+J2xycos2θx+(J2z+(J1y+Jp)sin2θy+J1xzcos2θy)sin2θx;
J34=J43=(J1y-J1xz+Jp)sinθycosθysinθx。
從式(2)和(3)可以看出,四軸平臺軸是相互耦合的,且伴隨著相對轉角的變化,耦合程度或系數也隨之變化。除此之外,外部干擾、模型參數未知及不確定性等各類因素都將影響穩定回路控制的動態性能和靜態性能。因此,四軸平臺的控制是十分復雜的問題。
1.3 穩定回路
三框架四軸平臺是在原來兩框架三軸平臺的基礎上,增加了一個隨動框架。三軸平臺部分由陀螺儀和穩定回路控制,穩定在慣性空間,而隨動框架則由隨動回路的控制而始終跟隨內框架。本文只研究穩定回路部分,選擇單自由度陀螺儀作為穩定回路的慣性敏感器件,由文獻[4]可得穩定回路方程:
(4)

令:

(5)
(6)
穩定回路方程式(6)考慮了模型未知、參數不確定以及外界干擾等因素,符合實際系統模型。
2 魯棒自適應反步控制器設計
為了便于分析問題,給出如下的假設與引理:
假設2 系統的不確定項|Δ1|≤B1,|Δ2|≤B2,其中B1,B2為已知參數。
假設3 系統的不確定參數θ滿足θmin≤θ≤θmax,其中θmin,θmax為θ的已知上下界。


其中,Г為參數辨識速率的正定對角陣,τ為自適應函數,此算法有如下2個特性:

根據反步法的基本原理,定義系統的誤差:
(7)
其中,xd為位置期望值;a1,a2為虛擬控制量;z1,z2和z3為控制誤差。
1) 對第1個子系統z1=x1-xd,考慮如下的Lyapunov函數:
(8)
對式(8)求導并聯合式(7)得:

(9)
取虛擬控制律:
(10)
式中,k1為虛擬控制律設計參數,且k1>0,將式(10)代入式(9)得:
(11)
2)選取如下的Lyapunov函數:
(12)
對式(12)求導,并聯合式(7)得:

(13)
取虛擬控制律:
(14)


(15)

3)選取如下的Lyapunov函數:
(16)
對式(16)求導得:
(17)
由式(7)得:
(18)


(19)
取控制律:
(20)
將式(20)代入式(19)得:

(21)

3 穩定性分析
(22)
對式(22)求導,并聯合式(21)得:

(23)
選擇自適應函數:

(24)
自適應控制律
(25)
將式(24)和(25)代入式(23),同時聯合特性2可得:

(26)
由式(26)和V≥0,可知Lyapunov函數V是遞減有界的,根據引理2可知,整個閉環系統穩定。
4 仿真驗證
為了驗證本文提出的魯棒自適應反步法的有效性和優越性,用MATLAB進行了仿真驗證,并與傳統的PID算法作對比試驗。陀螺儀參數:H=230g·cm·s,I=0.153g·cm·s2,D=25g·cm·s;框架軸參數:J=320 g·cm·s2,C=40g·cm·s;力矩電機提供最大力矩為Tn=40000g·cm:PID控制器參數:P=42,I=190,D=2;魯棒自適應反步法控制器參數:D1=0.004/I,D2=0.04/J,η1=2,η2=2,k1=36,k2=8,k3=5。設干擾力矩及未建模參數:Δ1=0.002g·cm,Δ2=0.02g·cm,上述條件下分別采用傳統PID控制和本文提出的魯棒自適應反步法控制方法,在MATLAB/SIMULINK下進行仿真,仿真結果如圖2。
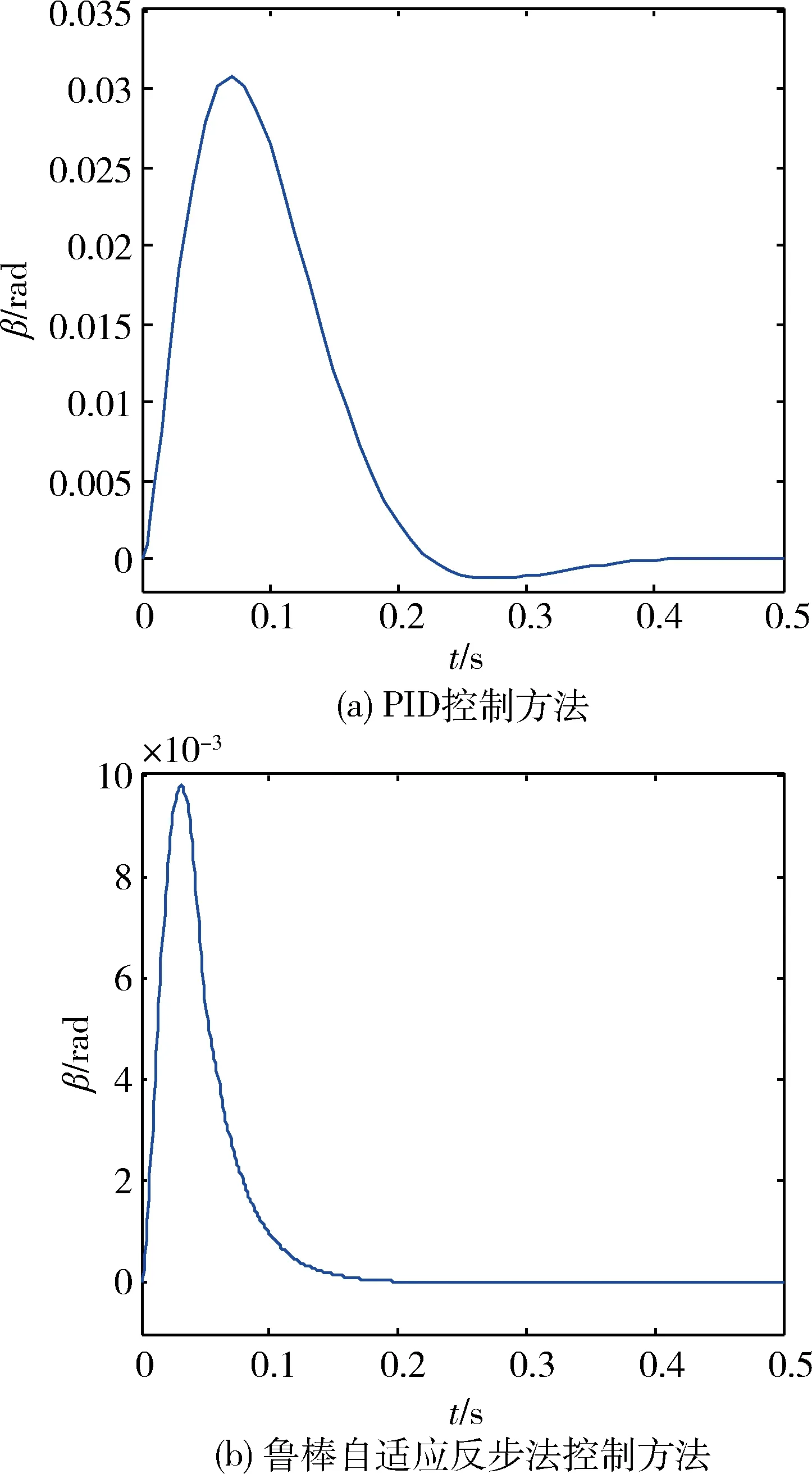
圖2 臺體軸擾動力矩下的轉動角度β響應曲線
由圖2仿真結果可得PID控制算法臺體軸轉動角度最大值為0.031rad,穩定時間為0.4s,超調量為0.0012rad,系統穩態誤差為9×10-5rad;魯棒自適應反步法控制方法臺體軸轉動角度最大值為0.0091rad,穩定時間為0.2s,系統無超調,系統穩態誤差為1.3×10-5rad。
5 結論
針對存在模型未知、不確定參數以及外界干擾項的平臺系統穩定回路,提出了一種魯棒自適應反步控制方法。首先,建立了平臺系統的數學模型,開展了平臺四框架運動學及動力學分析;其次,充分考慮系統參數的模型未知、參數不確定以及外界干擾的因素,建立了平臺穩定回路方程;再次,結合反步法理論,設計了合適的虛擬控制量,來補償外界干擾對穩定回路的影響;最后利用Lyapunov穩定性理論和光滑投影算法, 設計了參數自適應律,實現了對穩定回路中未知參數的估計。
參 考 文 獻
[1] Hilkert J M. Inertially Stabilized Platform Technology Concepts and Principles[J]. Control Systems IEEE, 2008, 28(1):26-46.
[2] Leghmizi S, Liu S, et al. Modeling, Design and Control of a Ship Carried 3 DOF Stabilized Platform[J]. Research Journal of Applied Sciences, Engineering and Technology, 2012, 4(19): 3843-3851.
[3] Safa A, Abdolmalaki R Y. Robust Output Feedback Tracking Control for Inertially Stabilized Platforms With Matched and Unmatched Uncertainties[J]. IEEE Transactions on Control Systems Technology, 2017, PP(99):1-14.
[4] 鄧益元. 靜壓液浮陀螺平臺系統[M]. 北京: 中國宇航出版社,2012.
[5] 高鐘毓. 慣性導航系統技術[M]. 北京: 清華大學出版社, 2012.
[6] 秦永元. 慣性導航[M]. 北京: 科學出版社, 2006.
[7] 王巾, 王凱. 高精度陀螺穩定平臺穩定回路設計[J]. 光電技術應用, 2012, 27(3): 26-29.(Wang Jin, Wang Kai. Design of Stabilized Loop for High Precision Gyro-stabilized Platform[J]. Electro-Optic Technology Application, 2012, 27(3): 26-29.)
[8] Li S S, Zhong M Y. Design of Control System Based on PID of Three-axis Inertially Stabilized Platform for Airborne Remote Sensing[J]. Journal of Jilin University, 2011.
[9] Li B, Hullender D, Direnzo M. Nonlinear Induced Disturbance Rejection In Inertial Stabilization Systems[J]. IEEE Transactions on Control Systems Technology, 2015, 6(3):421-427.
[10] Li Z, Fan D, Fan S. LuGre-Model-Based Friction Compensation in Direct-Drive Inertially Stabilized Platforms[J]. Ifac Proceedings Volumes, 2013, 46(5):636-642.
[11] Fang J C, Zi-Hui Q I, Zhong M Y. Feedforward Compensation Method for Three Axes Inertially Stabilized Platform Imbalance Torque[J]. Journal of Chinese Inertial Technology, 2010.
[12] 程婧容,楊慶明,談振藩. 慣性平臺穩定回路的變結構控制[J]. 中國慣性技術學報,1999,7(4):73-76.(Cheng Jingrong, Yang Qingming, Tan Zhenfan. The Variable Structure Control of the Stabilizing Circuits for Inertial Platform[J]. Journal of Chinese Inertial Technology, 1999, 7(4): 73-76.)
[13] 牛立,李莉,莊良杰. 慣性平臺穩定回路的自抗擾控制[J]. 中國慣性技術學報, 2004, 12(6): 48-51. (Niu Li, Li Li, Zhuang Liangjie. Active Disturbance Rejection Control of Stabilizing Circuits for Inertial Platform [J]. Journal of Chinese Inertial Technology, 2004, 12(6): 48-51.)
[14] Moorty J, Rajeev M, Sule V. H∞Control Law for Line-of-sight Stabilization for Mobile Land Vehicles [J]. Optical Engineering, 2002,4(11):2935-2944.
[15] Liu W, Zhou X. Nonlinear Friction Modeling and Adaptive Compensation on an Inertially Stabilized Platform System for Aerial Remote Sensing Application [J]. Journal of Mechanical Engineering, 2013,49(15):122-127.
[16] 李紅光, 魚云岐, 宋亞民. 最優控制在車載慣性平臺穩定回路中的應用[J]. 應用光學, 2007, 28(3):251-256. (Li Hongguang, Yu Yunqi, Song Yamin. Application of Optimal Control for Stabil Ization Loop of Vehicle Inertial Platform [J]. Journal of Applied Optics, 2007, 28(3):251-256.)
[17] 郭健, 姚斌, 吳益飛. 具有輸入齒隙的一類非線性不確定系統自適應魯棒控制[J]. 控制與決策, 2010, 25(10):1580-1584. (Guo Jian, Yao Bin, Wu Yifei. Adaptive Robust Control for a Class of Nonlinear Uncertain System with Input Backlash [J]. Control and Decision, 2010, 25(10):1580-1584.)
[18] 焦曉紅,吳新平.非線性系統分析與設計[M]. 北京:北京工業出版社, 2006.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32