大視場星光修正慣性導航半實物仿真系統設計
2018-05-19 03:23:26劉百奇劉建設
航天控制 2018年2期
關鍵詞:系統
劉百奇 劉建設 呂 艷
1.中國運載火箭技術研究院研究發展中心,北京100076 2. 空間物理重點實驗室, 北京 100076
星光修正慣性導航技術是一種利用星光定姿信息修正慣性導航累積誤差的導航技術,可提高飛行器的導航精度。為驗證星光修正慣性導航的能力,需要進行多種工況實驗分析驗證。然而實際的飛行實驗成本高、可重復性差、數據采集周期長,不適合初期的實驗研究。半實物仿真將物理仿真與數學模型結合起來,可以降低實驗成本,節約時間,同時具有接近真實實驗的驗證效果,是一種良好的實驗驗證手段。因此,國內外針對半實物仿真做了大量研究。
美國NASA在飛行器編隊飛行導航的問題上采用了半實物仿真的驗證方法[1-2]。國內,李濤等人提出了一種慣性導航系統的半實物仿真方案,對傳遞對準進行了半實物仿真[3]。范世鵬等人以及單家元等分別對激光制導武器的半實物仿真系統做了分析與設計實現[4],并應用在了某型導彈的半實物仿真實驗中[5]。陳志等人針對某導彈的半實物仿真測試系統進行了微型化、通用化的研究[6]。張翔等人提出了一種用于導彈批驗收的半實物仿真方法[7]。全偉等人研究了小視場星光修正慣性導航,提出了一種SINS/CNS組合導航的半實物仿真系統,并進行了初步的實驗研究[8],徐帆等人在此基礎上進一步開展了SINS/CNS/GPS組合導航的半實物仿真研究[9]。
本文針對快速發射固體運載火箭采用大視場星光修正慣性導航系統的需求,設計了一種高精度、實時性強的星光修正慣性導航半實物仿真系統。應用該系統可以方便地進行算法調試和系統性能測試。這對于加快星光修正慣性導航系統的研發速度、提高效率及降低成本具有一定的工程實踐意義。
1 總體方案
大視場星光修正慣性導航的基本原理是利用大視場星敏感器確定載體姿態,并以此精確姿態作為量測信息修正慣導誤差。其半實物仿真系統主要由軌跡發生器子系統、高精度星圖模擬子系統、恒星敏感器集成定姿子系統、捷聯慣性導航子系統和星光修正慣性組合導航子系統組成。星光修正慣性導航采用全捷聯模式,具有結構簡單、尺寸小、重量輕、成本低、可靠性高和光軸調校精度高等特點,整體方案如圖1所示。

圖1 大視場星光修正慣性導航總體方案
軌跡發生器模擬載體運動信息,結合設定的星敏感器安裝矩陣,產生星敏感器光軸指向信息,傳輸給星圖模擬子系統。星圖模擬子系統根據光軸指向,結合基本星表,通過高精度的星圖模擬程序,生成對應于光軸指向的星圖;再經過平行光管的作用,使得最終輸出的星圖為平行光,便于星敏感器鏡頭觀測星圖。星敏感器鏡頭拍攝到星圖,經過去噪、畸變校正和質心提取等過程獲得清晰的星點,再使用三角形匹配識別算法識別出最佳導航星;進一步,星敏感器集成定姿子系統將計算出當前的姿態信息,通過422串口通信的方式傳輸到組合導航專用計算機中。與此同時,慣性測量單元(IMU)敏感到地球自轉角速度。將IMU輸出的真實數據經過數據平滑等處理后減去地球自轉角速度這一常值就可以得出IMU的真實器件誤差信息。將該誤差與軌跡發生器生成的標稱陀螺儀、加速度數據相加就可以模擬飛行中的陀螺儀和加速度計數據,并通過串口通信的方式輸送到組合導航專用計算機中。慣性器件測量數據即陀螺儀測得角速率和加速度計測得的加速度數據,結合星敏感器集成定姿子系統提供的姿態信息,使用先進濾波算法進行組合導航和星光修正慣性導航誤差的操作。
利用該系統可以有效地實現星光修正慣性導航技術的半實物仿真,為分析算法性能和系統功能提供了經濟實用的實驗方法。
2 系統設計與實現
星光修正慣性導航半實物仿真系統由硬件部分和軟件部分組成,在設計中本著經濟、可操作性強、模擬程度高及可移植性好等原則和硬件模塊化、軟件流程一體化設計了該系統。
2.1 系統硬件設計
半實物仿真系統的硬件部分主要包括軌跡發生器計算機、星圖模擬計算機、高精度星圖模擬儀、星敏感器(含集成定姿系統,下同)、IMU和組合導航專用計算機。其中,軌跡發生器可以在實驗前生成模擬軌跡數據存儲到星圖模擬計算機和組合導航計算機等需要的設備中,以便于節省一臺計算機,降低成本、提高效率。從信息的流向看,可以將硬件系統分為姿態信息獲取與傳遞通道和慣性信息測量與傳遞通道。通過軟件同步方式同步各部件信息。
2.1.1 姿態信息的獲取與傳遞通路
姿態信息的獲取與傳遞通路包括軌跡發生器、星圖模擬計算機、星圖模擬儀和星敏感器等部件。星圖模擬計算機根據軌跡發生器提供的運動數據產生星圖信息,而星圖模擬儀將圖像信息轉化為平行光,它們之間通過VGA視頻線實現數據傳遞。星圖模擬儀與星敏感器之間信息傳遞的載體是光信號:星圖模擬儀發出平行光,星敏感器敏感平行光。星敏感器產生的姿態信息通過串口通信數據線傳輸到組合導航專用計算機。
2.1.2 慣性信息測量通路
慣性信息測量通路包括IMU、軌跡發生器等。軌跡發生器生成的陀螺儀數據和加速度計數據通過串口傳輸到組合導航專用計算機中;如果沒用專用的軌跡發生器計算機,可以將軌跡發生器的數據存儲在組合導航計算機中。IMU有專用的航空接頭與組合導航計算機連接。
2.2 系統軟件設計
2.2.1 軟件設計方案
軟件是整個系統的核心,合理的軟件設計可以降低對硬件的要求,提高系統運行效率。軟件設計要從實現系統功能出發。星光修正慣性導航半實物仿真系統的整體功能框圖如圖2所示。
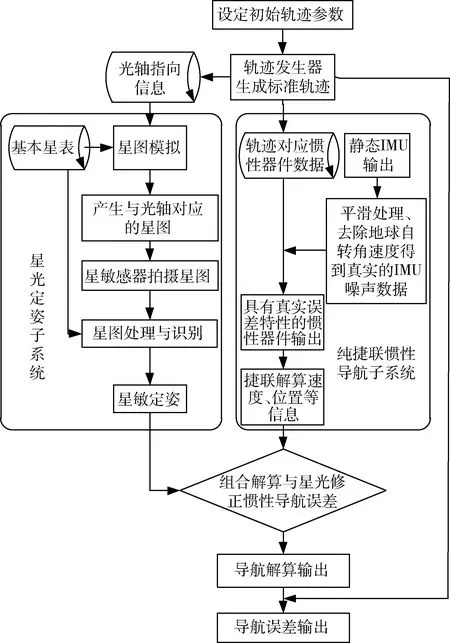
圖2 星光修正慣性導航半實物仿真系統功能實現框圖
星光修正慣性組合導航半實物仿真系統功能具體實現為初始化軌跡發生器參數,根據軌跡參數生成各子系統標稱軌跡數據。一方面,標稱軌跡數據結合星敏感器安裝矩陣可以計算出星敏感器光軸的指向信息。星敏感器光軸指向信息傳遞到星圖模擬子系統,根據星表和星歷產生特定視場的模擬星圖圖像。星敏感器集成定姿系統處理拍攝到的星圖,并進行星圖匹配識別進而得出姿態信息。另一方面,接收實時的IMU輸出數據,去除靜態IMU的標稱輸出值后疊加到軌跡發生器生成的標稱數據上,將其作為具有真實誤差特性的慣性器件輸出數據,通過捷聯解算求解出速度、位置和姿態。
建立ESP師資團隊還可以從教師入口和鼓勵團隊合作入手。在引進新教師時有側重地傾向選擇專業背景多元的外語人才,有助于實現外語教師的專業多元化。二是鼓勵專業教師與英語教師合作教學,與專業教師一起共同探索某一個領域的語篇結構和修辭手法,共同構建一門專業英語課程。
星光修正慣性組合導航計算機接收慣性、星光導航子系統的輸出數據,根據組合邏輯對信號進行時間同步預處理,并完成組合濾波以及星光修正慣性導航誤差。
2.2.2 軟件編寫流程
為實現星光修正慣性導航半實物仿真系統功能,按照如圖3所示的流程編寫星光修正慣性導航半實物仿真系統的軟件部分。

圖3 星光修正慣性導航半實物仿真算法流程圖
程序初始化后判斷慣性器件數據是否可用,如果讀取到慣性器件數據則進行下一步,否則等待讀取慣性器件數據。
讀取到正確的慣性器件誤差后判斷系統當前工作模式:純捷聯慣性導航模式下,將運行捷聯慣性導航算法模塊進行純捷聯慣性導航解算,得出姿態、速度和位置等信息,然后判斷是否滿足導航解算結束條件,如果滿足則結束,否則重復以上步驟;組合導航模式下將接收星敏感器輸出的姿態信息,運行卡爾曼濾波程序和捷聯慣性導航程序進行組合導航解算,并反饋校正慣性導航信息。
反饋校正后依次判斷平臺失準角、陀螺漂移和加速度計零偏估計情況,根據狀態量的估計情況判斷是否修正其引起的導航累積誤差。
2.3 系統實現
根據系統的總體設計思想及各部分軟硬件構成,星光修正慣性導航半實物仿真系統實現如圖4所示。
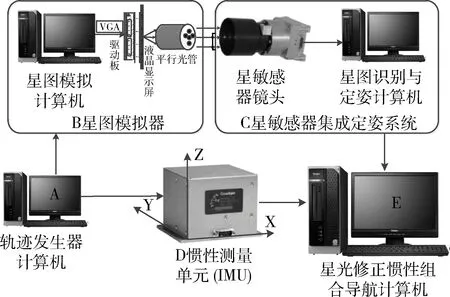
圖4 星光修正慣性導航技術半實物仿真系統總體結構圖
計算機A是軌跡發生器,利用軌跡發生器軟件模擬飛行軌跡數據,為星光修正慣性組合導航半實物仿真系統提供統一的標準軌跡數據。
設備B是高精度的星圖模擬子系統,根據軌跡發生器數據和星敏感器安裝矩陣生成飛行過程中恒星敏感器觀測到的星圖,并通過平行光管等器件產生平行光輸出。星圖模擬子系統是一種為測試星敏感器功能和驗證星圖識別算法性能,提供仿真星圖數據的仿真系統,主要包括星圖模擬計算機、分頻器、顯示設備、光源系統、液晶顯示系統和平行光管6部分,其中星圖模擬計算機中裝有星圖模擬算法和基本星表。星圖模擬儀如圖5所示。

圖5 大視場星圖模擬儀
設備C是星敏感器集成定姿子系統,包絡星敏感器鏡頭和定姿處理計算機;它通過星敏感器觀測到導航星,經過高精度的星圖處理和天文定姿技術得到精確的姿態信息。使用的星敏感器其視場大小為14°×14°,可以敏感6等及以上恒星,最高輸出頻率可達40Hz。
設備D是慣性導航子系統,根據軌跡發生器的數據和慣性測量單元(IMU)的信息進行捷聯慣性導航解算,得到初步的導航信息。所用的IMU陀螺儀漂移為0.05(°)/h,加速度計為20ug,數據輸出頻率為100Hz,如圖6所示。
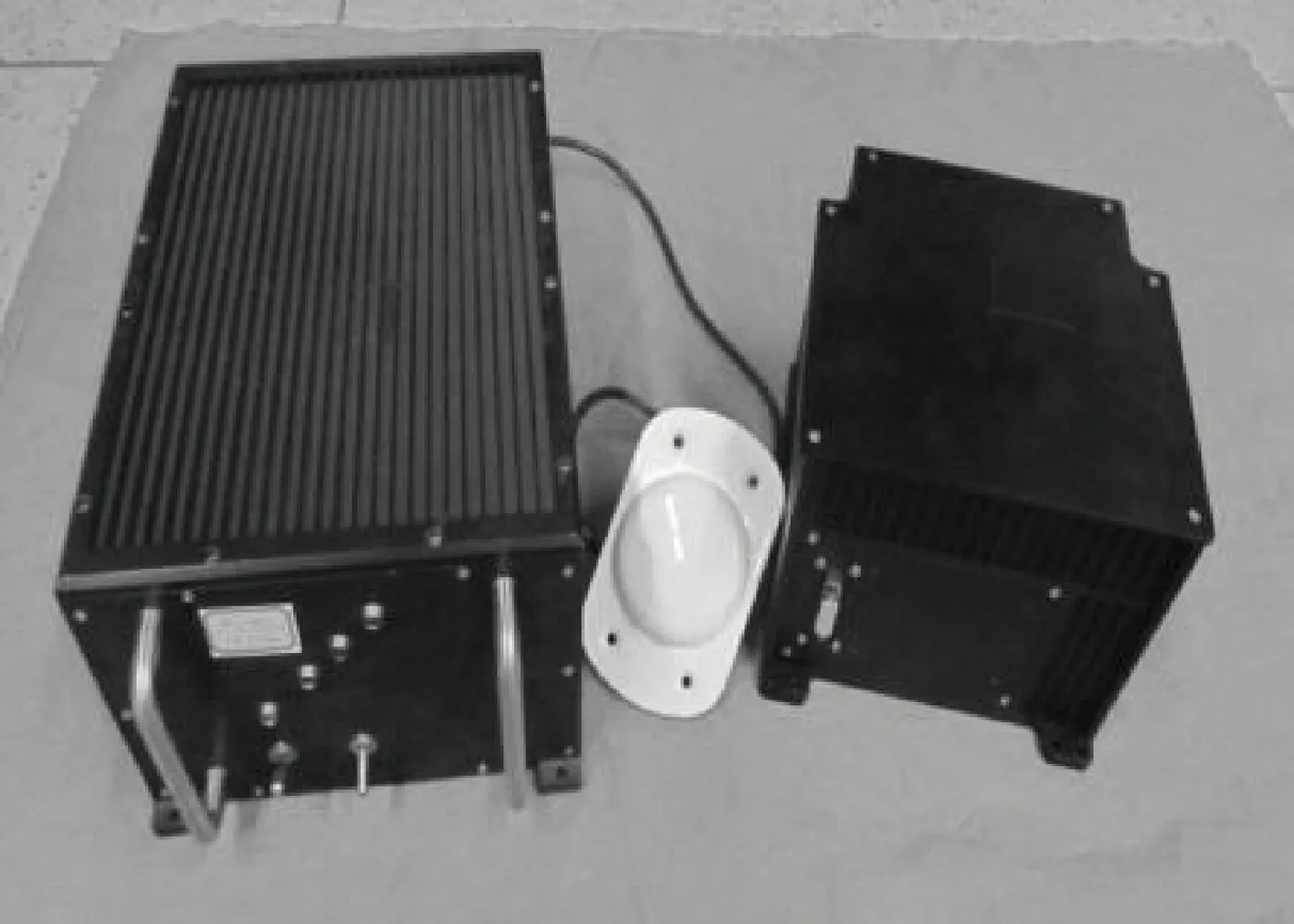
圖6 IMU
計算機E是星光修正慣性組合導航子系統,它接受來自集成定姿子系統的姿態信息和慣性導航系統提供的導航信息進行組合導航解算并完成星光修正慣性導航累積誤差的工作。圖7是E上搭載的星光修正慣性導航半實物仿真軟件。

圖7 星光修正慣性導航半實物仿真軟件
3 半實物仿真實驗與分析
基于圖8所示的大視場星光修正慣性導航半實物仿真系統進行了半實物仿真實驗,從純捷聯慣性導航與星光修正慣性導航誤差比較的角度驗證了系統性能,并分析了陀螺漂移大小和星敏感器定姿精度對星光修正慣性導航誤差的影響。圖8是搭建的半實物仿真實驗系統實物圖。

圖8 大視場星光修正慣性導航半實物仿真系統
基于本文設計并實現的半實物仿真系統,開展了大視場星光修正慣性導航系統方法的驗證。在驗證大視場星光修正慣性導航姿態誤差方法的同時,也驗證了利用狀態轉移矩陣修正主動段慣導累積的位置和速度誤差的方法。
3.1 系統驗證實驗條件
半實物仿真系統性能驗證實驗條件如表1所示。
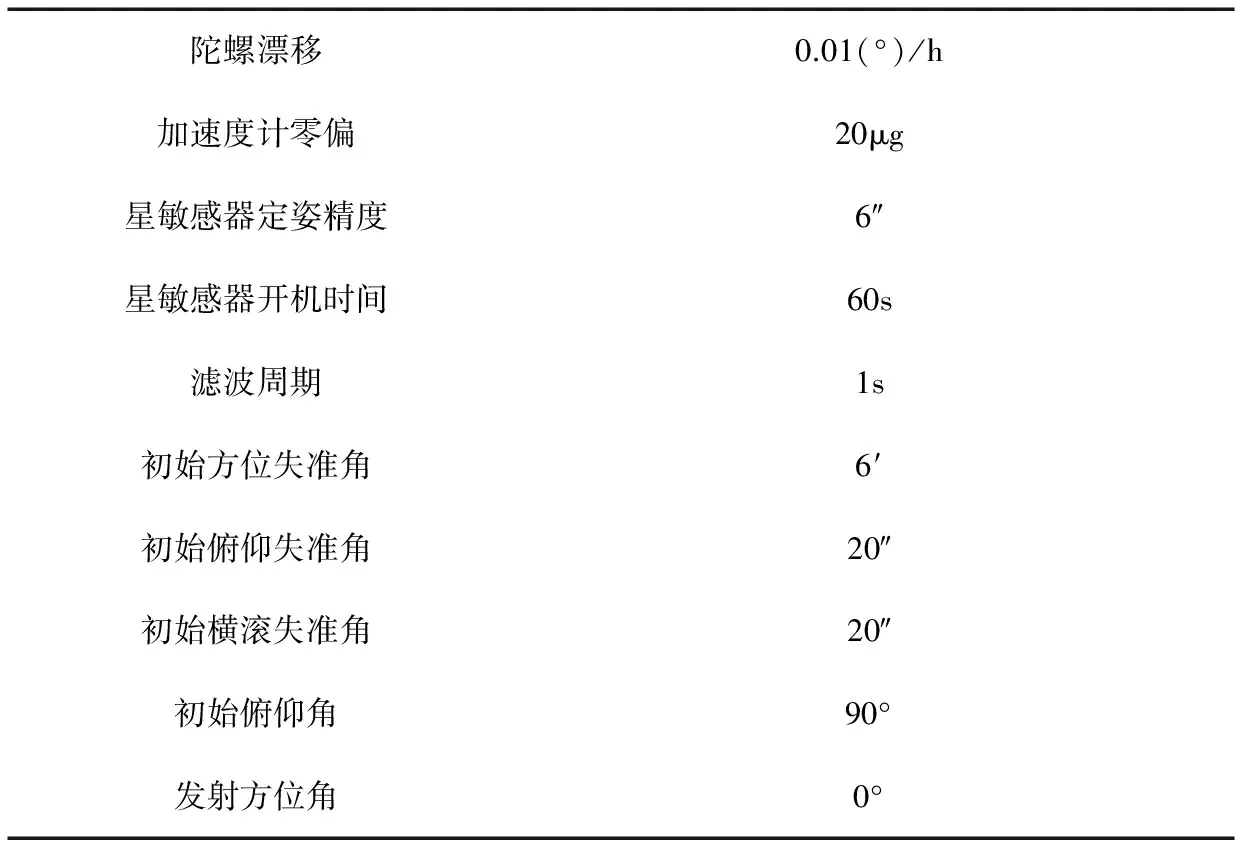
表1 半實物仿真系統性能驗證實驗條件
3.2 驗證的狀態轉移矩陣修正方法



(1)


3.3 系統驗證實驗結果與分析
通過半實物仿真系統驗證實驗,大視場星光修正慣性系統姿態誤差、速度誤差和位置誤差的結果如圖9~11。
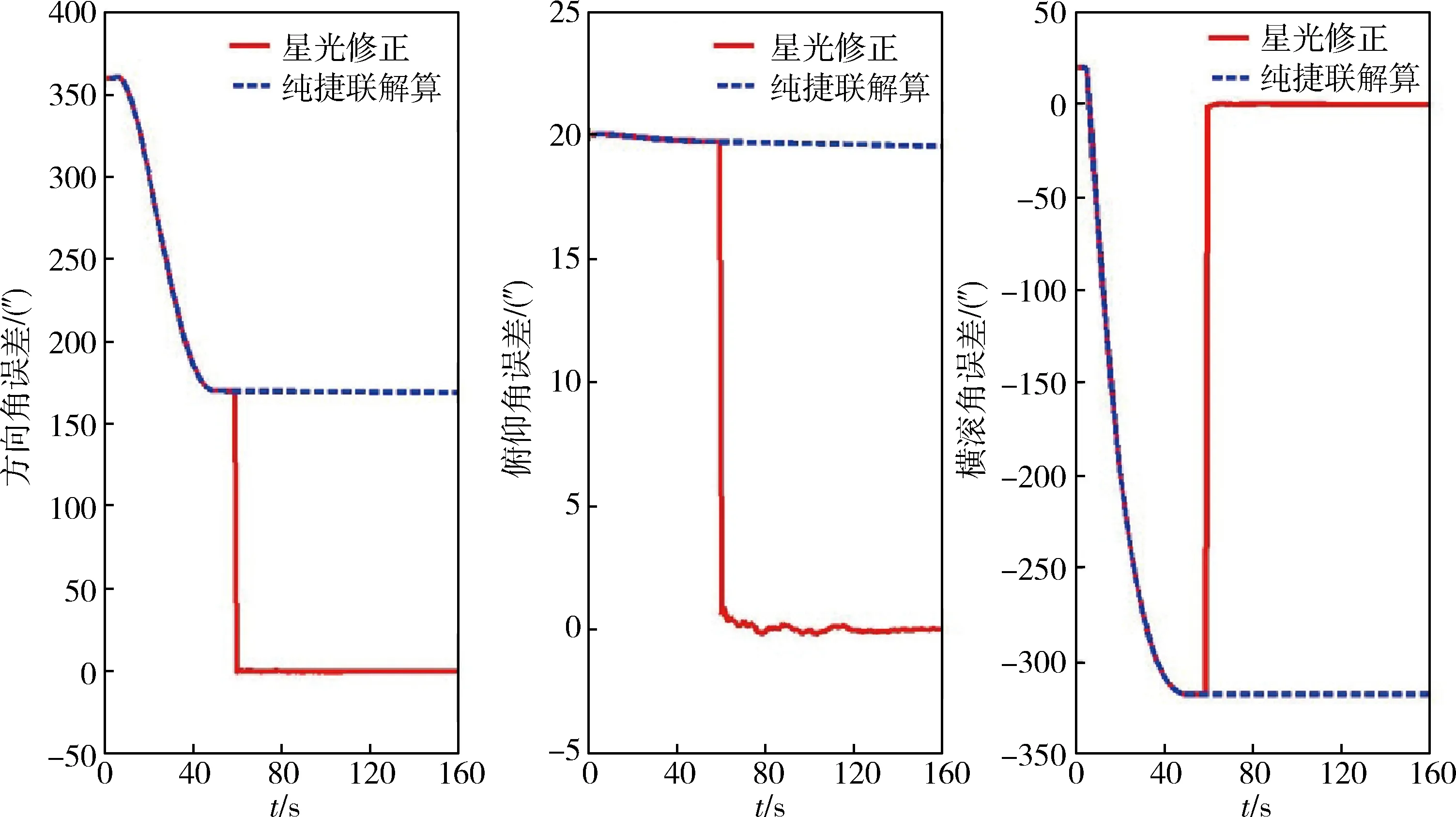
圖9 大視場星光修正慣性系統姿態誤差結果

圖10 大視場星光修正慣性系統速度誤差結果

圖11 大視場星光修正慣性系統位置誤差結果
表2~4給出了大視場星光修正慣性導航半實物仿真實驗的統計結果。
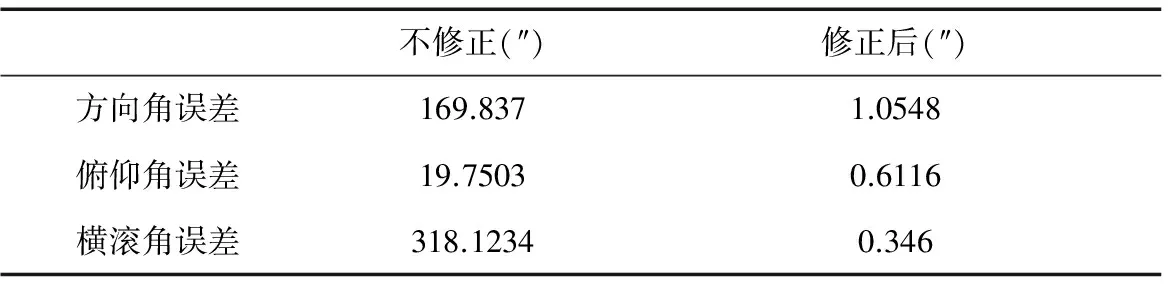
表2 大視場星光修正慣性系統姿態誤差結果統計表
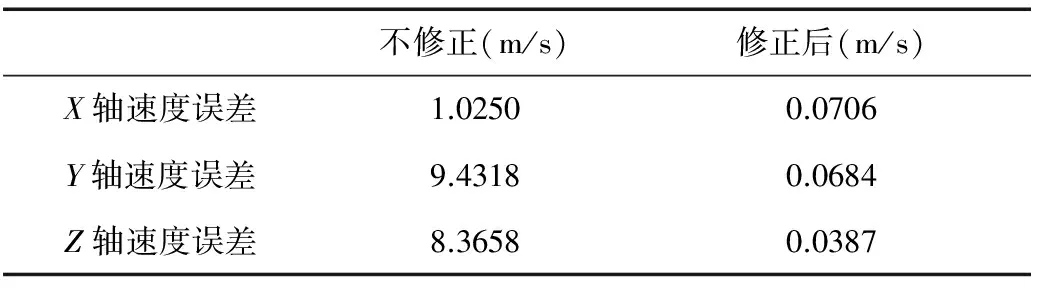
表3 大視場星光修正慣性系統速度誤差結果統計表
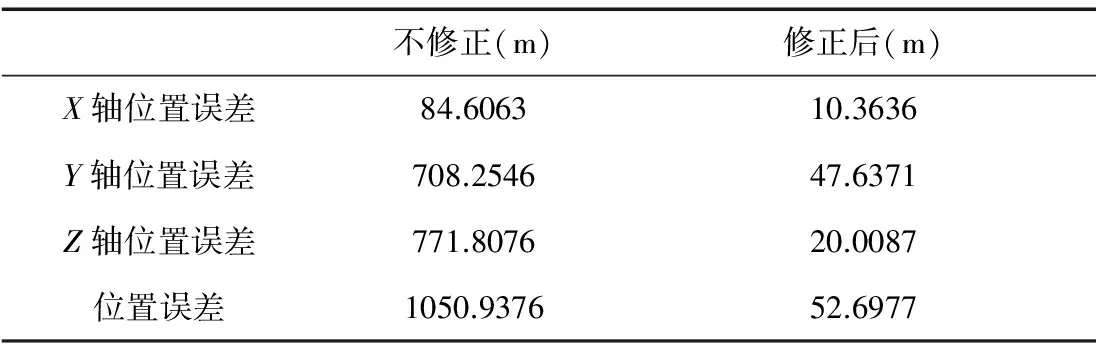
表4 大視場星光修正慣性系統位置誤差結果統計表
根據以上半實物仿真實驗結果表明,大視場星光可以有效降低慣性導航累積的誤差。星光修正慣性導航半實物仿真系統驗證實驗的結果符合預期,滿足設計要求,能夠為星光修正慣性導航技術的驗證與進一步工程應用研究奠定基礎。
4 結論
大視場星光修正慣性導航半實物仿真系統的成功搭建,為在室內研究大視場星光修正慣性導航性能提供了更加貼近實際情況的驗證手段。本系統在搭建時充分考慮了實際器件的誤差特性,采用真實星敏感器和IMU采集器件誤差數據,提高了系統仿真程度。
實驗證明,所設計的半實物仿真系統能夠有效進行大視場星光修正慣性導航的半實物仿真研究。該半實物仿真系統在軟件上可以設定不同的陀螺漂移、加速度計零偏和星敏感器等器件誤差和濾波周期等算法參數,可以有效分析上述參數對星光修正慣性導航技術的影響。所設計的半實物仿真系統經濟實用、仿真精度高,實驗數據可以為實際工程應用提供先行驗證,有利于加快星光修正慣性導航系統的研發速度,提高效率。
參 考 文 獻
[1] Williamson W, Rios T, Speyer J L. Carrier Phase Differential GPS/INS Positioning for Formation Flight[C]. Proceedings of 1999 IEEE American Control Conference, 1999, 5: 3665-3670.
[2] Hunt C, Smith C, Hart R, et al. Development of a Crosslink Channel Simulator[C]. Proceedings of 2004 IEEE Aerospace Conference, 2004, 2: 1322-1328.
[3] 李濤, 李興瑋. 一種新的慣性導航系統半實物仿真方案[J]. 計算機仿真, 2005, 22(1): 55-57. (Li Tao, Li Xingwei. A New Hardware-in-the-loop Simulation Scheme of Inertial Navigation System[J]. Computer Simulation, 2005, 22(1):55-57.)
[4] 范世鵬, 林德福, 路宇龍, 等. 激光制導武器半實物仿真系統的設計與實現[J]. 紅外與激光工程, 2014, 43(2): 394-397. (Fan Shipeng, Lin Defu, Lu Yulong et al. Design and Achievement of Hardware-in-the-loop Simulation System for Guided Shell Based on Laser Semi-Active Seeker[J]. Infrared and Laser Engineering, 2014, 43(2): 394-397.)
[5] 單家元, 劉藻珍, 李鐘武, 等. 激光制導武器半實物仿真實驗系統[J]. 計算機仿真, 2002, 19(2): 15-17. (Shan Jiayuan, Liu Zaozhen, Li Zhongwu, et al. The Hardware-in-the-loop Simulation System for The Guidance System Laser Guided Weapon[J]. Computer Simulation, 2002, 19(2): 15-17.)
[6] 陳志, 何玉珠. 某導彈半實物仿真測試系統微型化的研究[J]. 電子測量技術, 2014 (2): 13-16. (Chen Zhi, He Yuzhu. The Micronizing Research of Hardware-in-the-loop Simulation for a Missile Test System[J]. Electronic Measurement Technology, 2014 (2): 13-16.)
[7] 張翔, 劉滿國, 王洋, 等. 基于半實物仿真的導彈批驗收實驗方法[J]. 南京航空航天大學學報, 2012, 44(2): 257-261. (Zhang Xiang, Liu Manguo, Wang Yang. Method for Missile Batch Acceptance Based on Hardware-in-the-loop Simulation[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2012, 44(2): 257-261.)
[8] 全偉, 房建成. SINS/CNS 組合導航半實物仿真系統及其實驗研究[J]. 系統仿真學報, 2007, 19(15): 3414-3418. (Quan Wei, Fang Jiancheng. Realization and Experimental Reserch for Hybrid Simulation System of SINS/CNS Integrated Navigation[J]. Journal of System Simulation, 2007, 19(15): 3414-3418.)
[9] 徐帆, 房建成, 全偉. SINS/CNS/GPS 組合導航系統半實物仿真研究[J]. 系統仿真學報, 2008, 20(2): 332-335. (Xu Fan, Fang Jiancheng, Quan Wei. Hardware-in-the-loop Simulation of SINS/CNS/GPS Integrated Navigation System[J]. Journal of System Simulation, 2008, 20(2): 332-335.)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32