探空火箭箭頭姿態控制系統物理仿真*
2018-05-19 03:23:36毛博年李艷麗邵飛翔卞春江
航天控制 2018年2期
高 東 韓 鵬 毛博年 李艷麗 邵飛翔 卞春江
1.中國科學院國家空間科學中心,北京 100190 2.中國科學院大學天文與空間科學學院,北京 100049 3.凱邁(洛陽)氣源有限公司,洛陽 471003
探空火箭是一種進行臨近空間垂直探測、科學載荷空間試驗、微重力實驗的有效平臺[1-2]。隨著航天技術的發展,作為航天技術搖籃的探空火箭因其具有獨特不可替代的作用,其試驗活動也蓬勃發展,美國NASA指出,火箭探空計劃在開拓新的學科領域和發展空間技術方面起到了關鍵性的作用,為發展新儀器、新實驗、新觀測技術和探索新領域提供了經濟而有效的手段,應繼續保持強有力的火箭探空計劃。
我國于50年代開始研制探空火箭,但60年代后,探空火箭的研制進入了沉寂期,進入21世紀后,探空火箭又逐步走上了進行近地空間探測的舞臺。中國科學院國家空間科學中心在子午工程、863計劃支持下進行了一系列的火箭探測任務。隨著探測任務的不斷推進和探測效果的不斷提高,在鯤鵬-1B探空火箭設計中,為箭頭平臺增加了姿態控制系統,協助探空火箭完成既定的探測目標。
探空火箭箭頭是一種細長型的、可繞縱軸(火箭最小慣量軸)旋轉的一種飛行器,箭頭姿態控制系統在飛行任務中,需要完成箭頭的消旋/消章控制、三軸穩定控制、姿態機動控制和軸向(縱軸)旋轉控制等一系列控制動作,控制要求高,難度較大。在箭頭姿態控制系統設計完成后,為了在地面進行姿態控制系統性能的仿真與測試,需要建立基于三自由度氣浮轉臺的箭頭姿態控制物理仿真系統。相比箭頭姿態控制系統的數字仿真,物理仿真系統具有如下優勢:
1)全物理仿真不必用數學模型代替控制系統和控制對象的動力學;控制系統的各環節實物直接參與控制氣浮臺,可有效發現控制系統設計和某些部件實際模型存在的問題[3];
2)全物理仿真可以充分驗證和測試系統各環節的耦合特性,而數學模型很難刻畫各環節的耦合作用;
3)將全物理仿真的結果與數字仿真結果進行比較和分析,可以進一步促進姿態控制系統數學模型建立過程,提高數學模型的精度。
與衛星物理仿真系統相比,箭頭姿態控制系統需要完成軸向自旋控制、大角度姿態機動等復雜的控制動作,所以其三自由度氣浮轉臺需要具備兩軸無限制轉動特性,為此需要設計能夠適應探空火箭箭頭姿態運動特點的三自由度氣浮轉臺。
本文介紹了鯤鵬1B探空火箭的姿態控制系統,對驗證該姿控系統的地面物理仿真系統的設計進行了詳細介紹,介紹了姿控系統的算法,最后對探空火箭任務的4種模式進行仿真測試。
1 箭頭姿態控制系統的組成
箭頭姿態控制系統由慣量姿態測量儀、姿態控制器、姿態驅動器和冷氣推進器組成。見圖 1所示。慣性姿態測量儀實時測量箭頭的姿態信息,并將姿態信息發送至姿態控制器,姿態控制器計算出姿態控制指令,姿態控制指令由姿態驅動器轉化為冷氣推進器的開關信號,驅動冷氣推進器產生控制力矩,控制箭頭的姿態。
慣性姿態測量儀采用三架構的光纖陀螺和石英加速度計組成,實時測量箭頭的姿態角和角速度的信息;姿態控制器采用FPGA+DSP的架構設計,集成了RS422接口電路和總線接口電路,解析姿態信息、進行飛行控制管理和控制指令計算;姿態驅動器基于TI公司的電磁閥專用工業級驅動芯片DRV102進行設計,接收控制器的控制指令,并輸出冷氣推進器的開關信號。
冷氣推進器由高壓氣瓶、減壓器、壓力傳感器、電磁閥和連接管路組成。冷氣推進器布局在箭頭的尾部,根據控制要求設計6個噴嘴,每個噴嘴由單獨的電磁閥控制。6個噴嘴進行組合可以實現滾動、俯仰和偏航3個通道的姿態控制。
2 箭頭姿態控制全物理仿真系統設計
箭頭姿態控制全物理仿真系統由三自由度氣浮轉臺、箭頭姿態控制系統、電源模塊、數據管理單元和數據遙測單元組成。三自由度氣浮轉臺用來模擬箭頭的姿態動力學,數據管理單元用來將姿態控制系統的遙測數據和監測數據進行集中管理,數據遙測單元把數據下傳至地面計算機,進行實時監測,如圖 2所示。
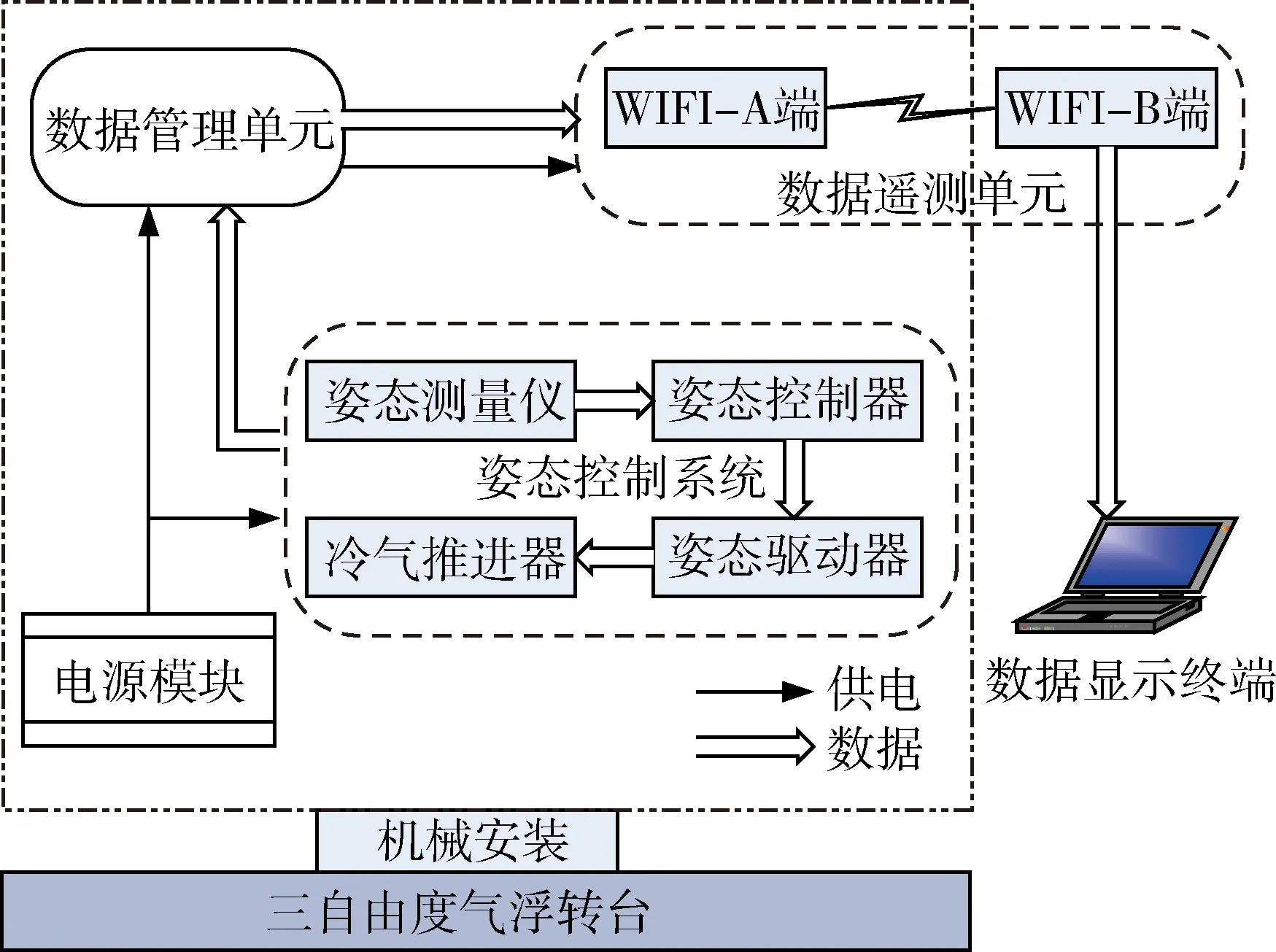
圖2 箭頭姿態控制系統物理仿真系統組成原理圖
三自由度氣浮轉臺是物理仿真的核心設備,氣浮轉臺是依靠壓縮空氣在氣浮軸承與軸承座之間形成的氣膜,使轉動的部分浮起,從而實現失重和無摩擦的相對運動條件[4-5],以模擬探空火箭箭頭在實際飛行過程中的姿態運動。
為了滿足探空火箭箭頭可以繞縱軸旋轉和大角度機動的姿態運動特性,三自由度氣浮轉臺需要具備2軸無限制運動,以充分模擬箭頭的姿態運動,滿足箭頭姿態控制系統的仿真與測試需求。為此參考文獻[6]設計了適應鯤鵬1B箭頭姿態控制系統的懸臂梁式三自由度氣浮轉臺,來模擬箭頭的姿態運動,見圖 3所示。
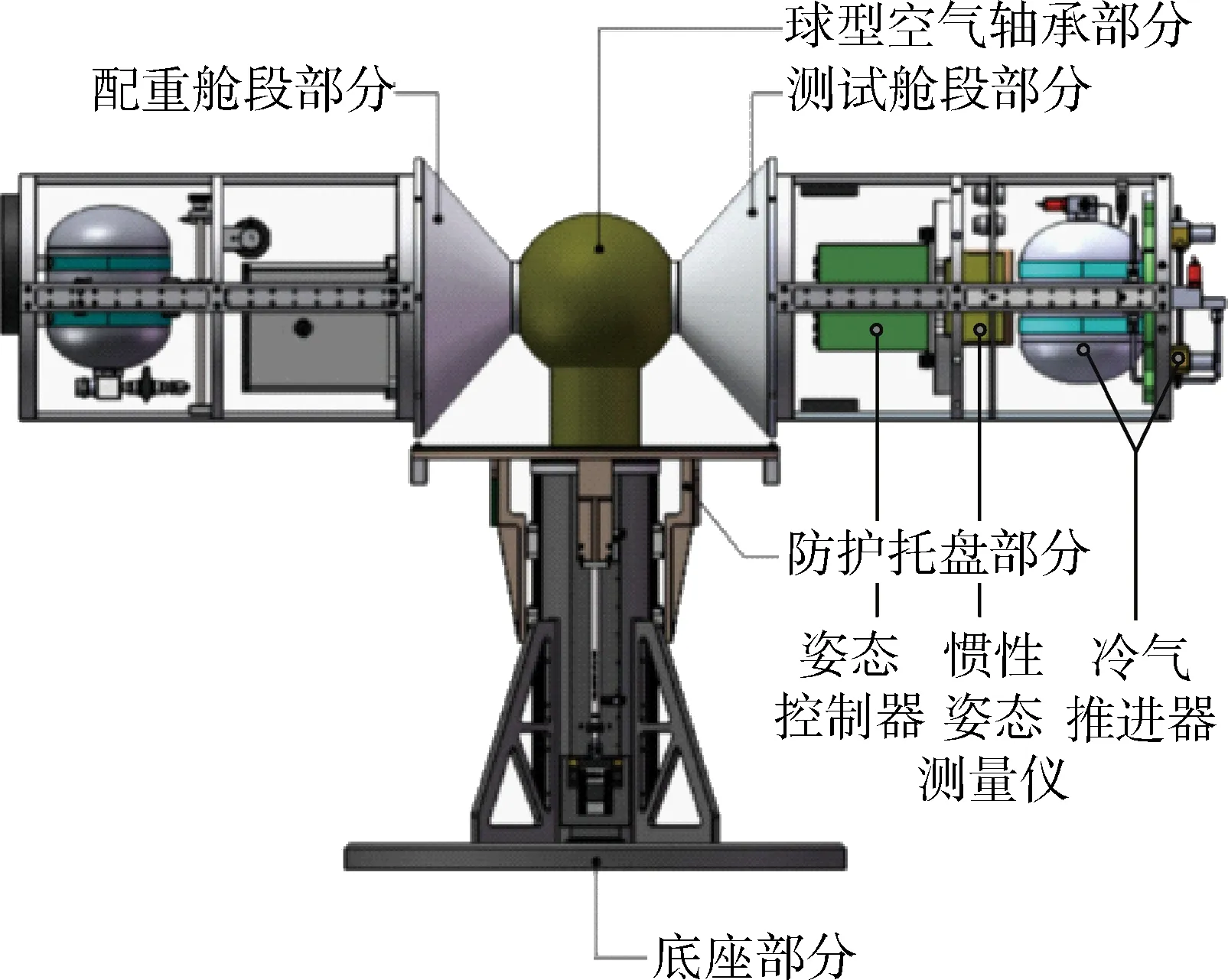
圖3 懸臂梁式三自由度氣浮轉臺
該懸臂梁式三自由度氣浮轉臺可以在偏航和滾動兩個通道進行360°無限制運動,其主要性能指標如下:
軸向可旋轉角度為360°;偏航可旋轉角度為360°;俯仰可旋轉角度為±30°;氣浮軸承摩擦力矩為<10-4Nm;轉臺可承載質量≥400kg。
探空火箭箭頭姿態控制系統1∶1安裝到氣浮臺轉臺懸臂的一端,另一端安裝配重裝置,以保持氣浮轉臺的平衡。由于箭頭姿態控制系統采用冷氣推進器作為執行機構,在試驗過程中,隨著冷氣推進器的工作,冷氣推進器儲氣瓶的氣體的減少會破壞氣浮臺的平衡狀態,為此設計了雙氣瓶結構,2個氣瓶分別安裝到氣浮轉臺懸臂兩端,采用管路聯通,這樣冷氣推進器在工作過程中,同時消耗2個氣瓶中的氣體,氣浮臺始終保持平衡,見圖4所示。
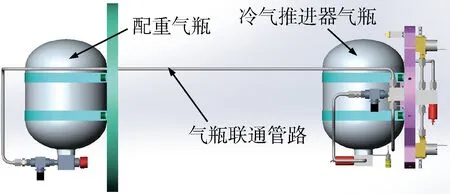
圖4 三自由度氣浮轉臺氣瓶配平設計
供電模塊負責為箭頭姿態控制系統、數據管理單元和遙測單元進行供電。為了實現低成本設計,供電模塊采用普通的鋰電池,并經過適當設計,實現可控上、斷電功能。
數據管理單元將箭頭姿態控制系統物理仿真過程中的滾動角、俯仰角和偏航角數據和系統的監測數據進行統一管理后發送至數據遙測單元的WIFI-A端口處,如圖2所示。
數據遙測單元利用無線WIFI設備實現地面仿真工控機與氣浮轉臺上的箭頭姿態控制系統進行數據通訊。遙測數據通過WIFI-A端口發送,WIFI-B端口進行接收,并通過有線方式傳送至地面數據顯示終端。
三自由度氣浮轉臺受到臺體的限制,其俯仰通道的活動控制只有30°,不能充分模擬箭頭在飛行時的姿態運動(箭頭在實際飛行時需要進行俯仰60°→-60°的姿態機動),為此,利用氣浮轉臺的偏航運動通道模擬箭頭的俯仰運動,這樣可以充分對姿態機動控制環節進行有效仿真。
3 全物理仿真
3.1 控制算法
為了適應冷氣推進器的開關特性和高精度指向控制要求,控制器應具有開關特性輸出,并具有一定的阻尼特性,為此,控制器采用偽速率控制[7]。控制器結構見圖5所示。

圖5 偽速率控制器
偽速率控制器具有很好的穩定精度,且具有相位超前特性,可以為系統提供一定的阻尼特性。控制回路中,根據冷氣推進器的最小控制脈沖寬度和控制精度等因素綜合設計Km和Tm的值。偽速率控制器的最小控制脈沖寬度與其它參數的關系為
上式中,Ton為最小指令噴氣時間;h為遲滯系數;?D為極限環寬度(極限環可以表征角度或者角速度)。
在控制律設計中,雖然偽速率控制器可以給系統帶來一定的阻尼特性,但是阻尼較小,達不到設計要求,為此我們提出了一種改進的偽速率控制器[8],即在原偽速率控制器的前端增加一個PD形式的前饋網絡,這樣可以進一步增加系統阻尼,有效防止控制超調。改進的偽速率控制器如圖6所示。
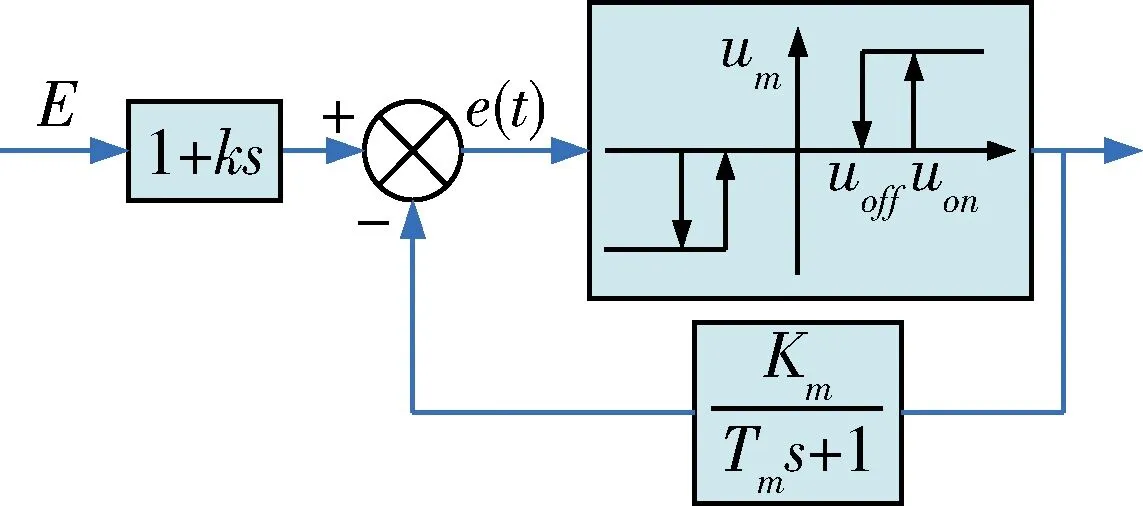
圖6 一種改進的偽速率控制器
3.2 仿真測試
利用箭頭姿態控制系統物理仿真轉臺對消旋、三軸穩定、姿態機動和軸向旋轉4個控制模式進行測試,4個模式依次在一次物理仿真過程中實現,物理仿真系統的性能參數為:
姿態測量精度為0.6°;角速度測量精度為0.05(°)/s;測量頻率為200Hz;控制頻率為≤50Hz;控制精度為≤3°;
仿真的初始條件和控制目標為:
系統起控時間為41s;
4種控制模式時間分別為:
a)消旋控制模式:41s~61s;
b)三軸穩定控制模式:62s~270s;
c)姿態機動控制模式:271s~291s;
d)軸向(縱軸)旋轉控制模式:>291s;
初始姿態參數:滾動角速度320(°)/s,偏航角50°;
三軸穩定控制目標:俯仰和滾動0°,偏航60°;
姿態機動開始時間為271s;
姿態機動通道及角度:偏航軸機動120°;
旋轉通道及角速度:將滾動軸起旋至180(°)/s。
在物理仿真過程中,會在三軸分別施加一定的人工干擾,即在氣浮臺運行過程中,人為觸碰氣浮臺旋臂,使箭頭姿態快速偏離控制目標,以驗證箭頭姿態控制系統的抗干擾能力,箭頭姿態控制系統物理仿真的控制效果如圖7~12所示。
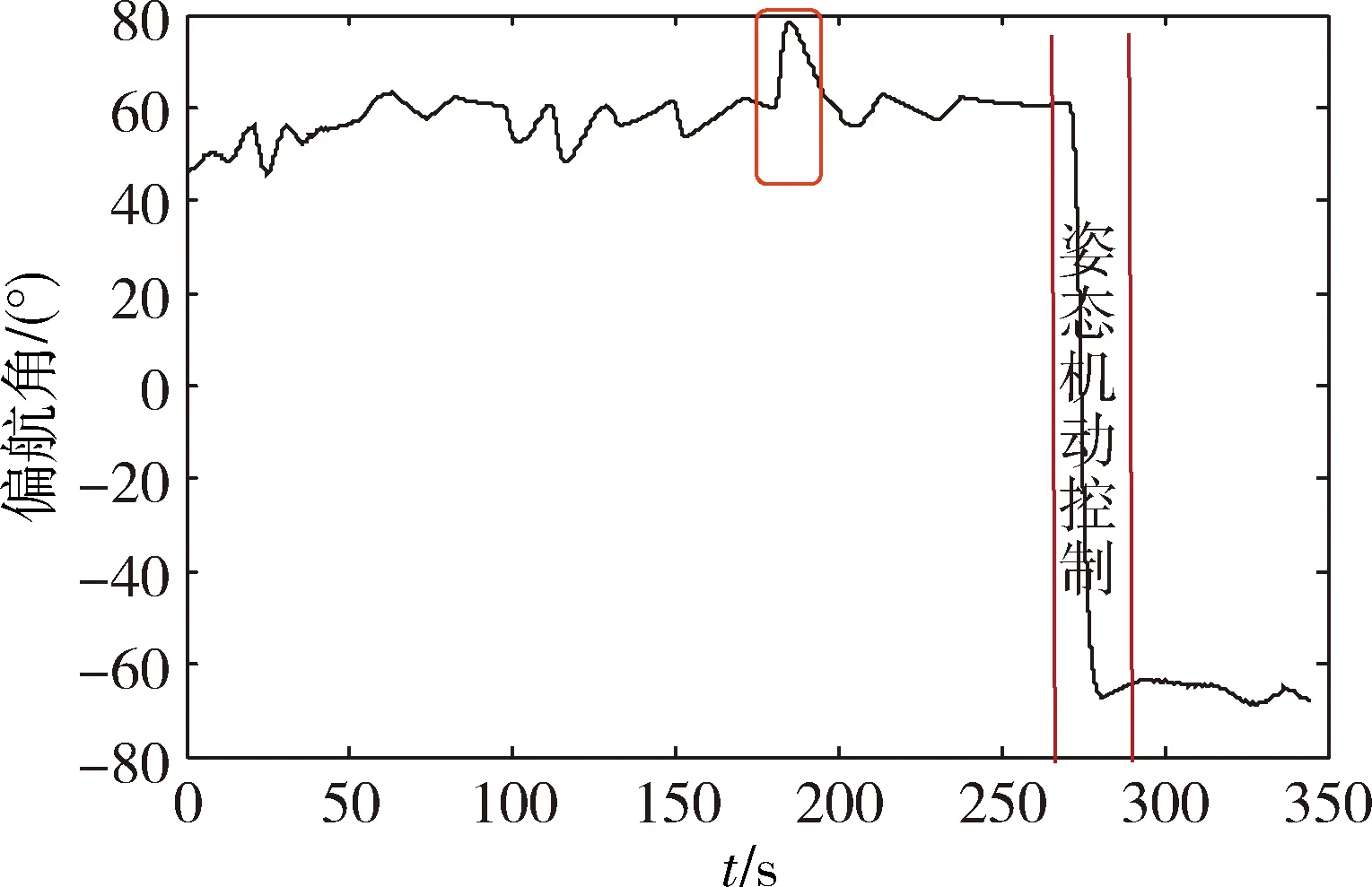
圖7 偏航角控制響應
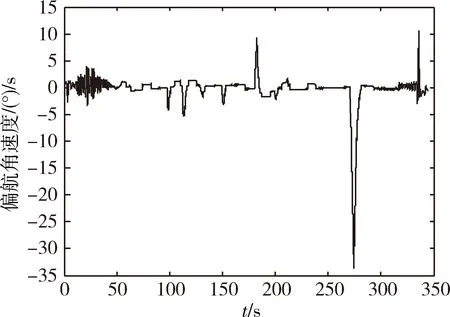
圖8 偏航角速度控制響應

圖9 俯仰角控制響應
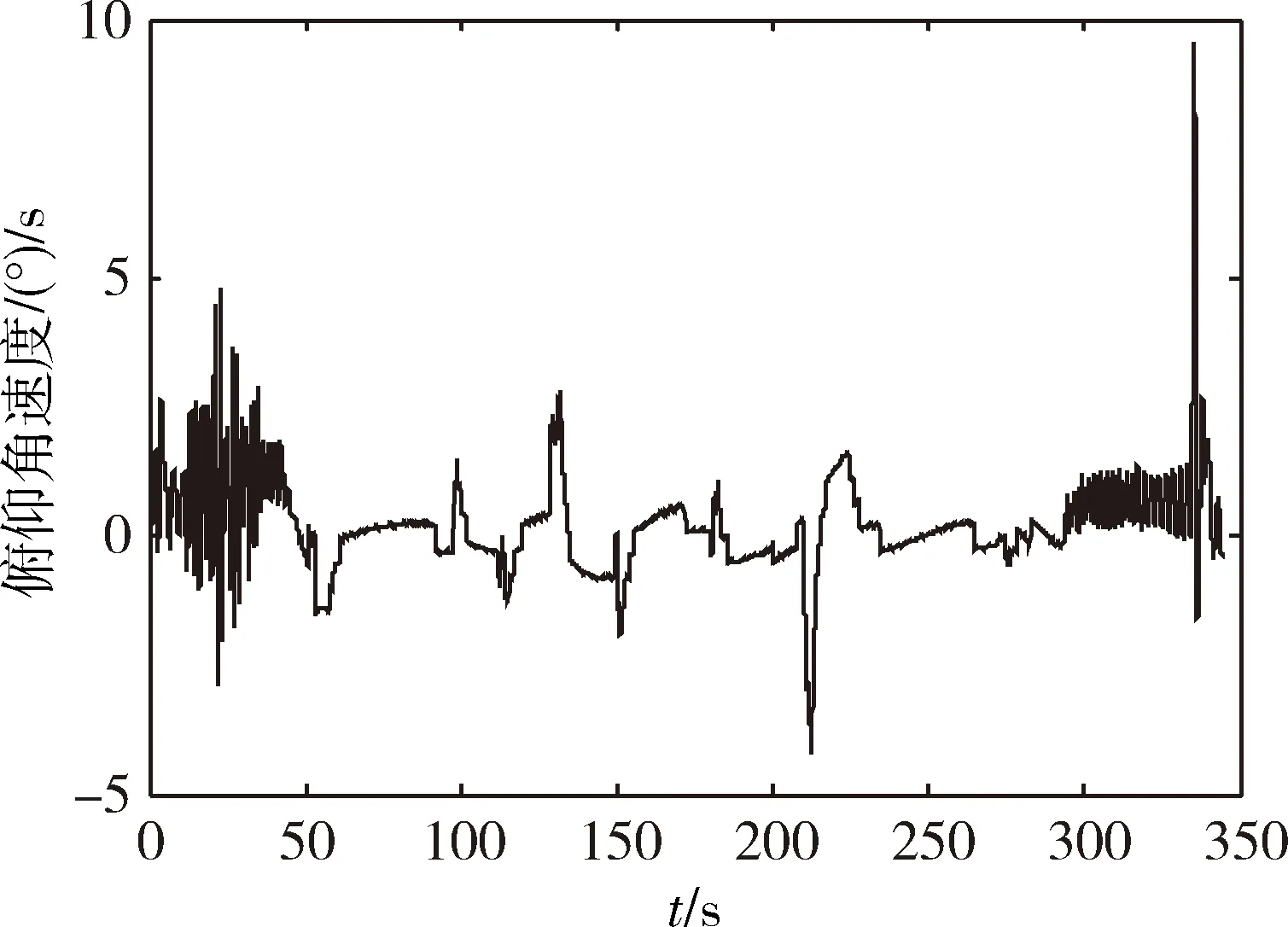
圖10 俯仰角速度控制響應
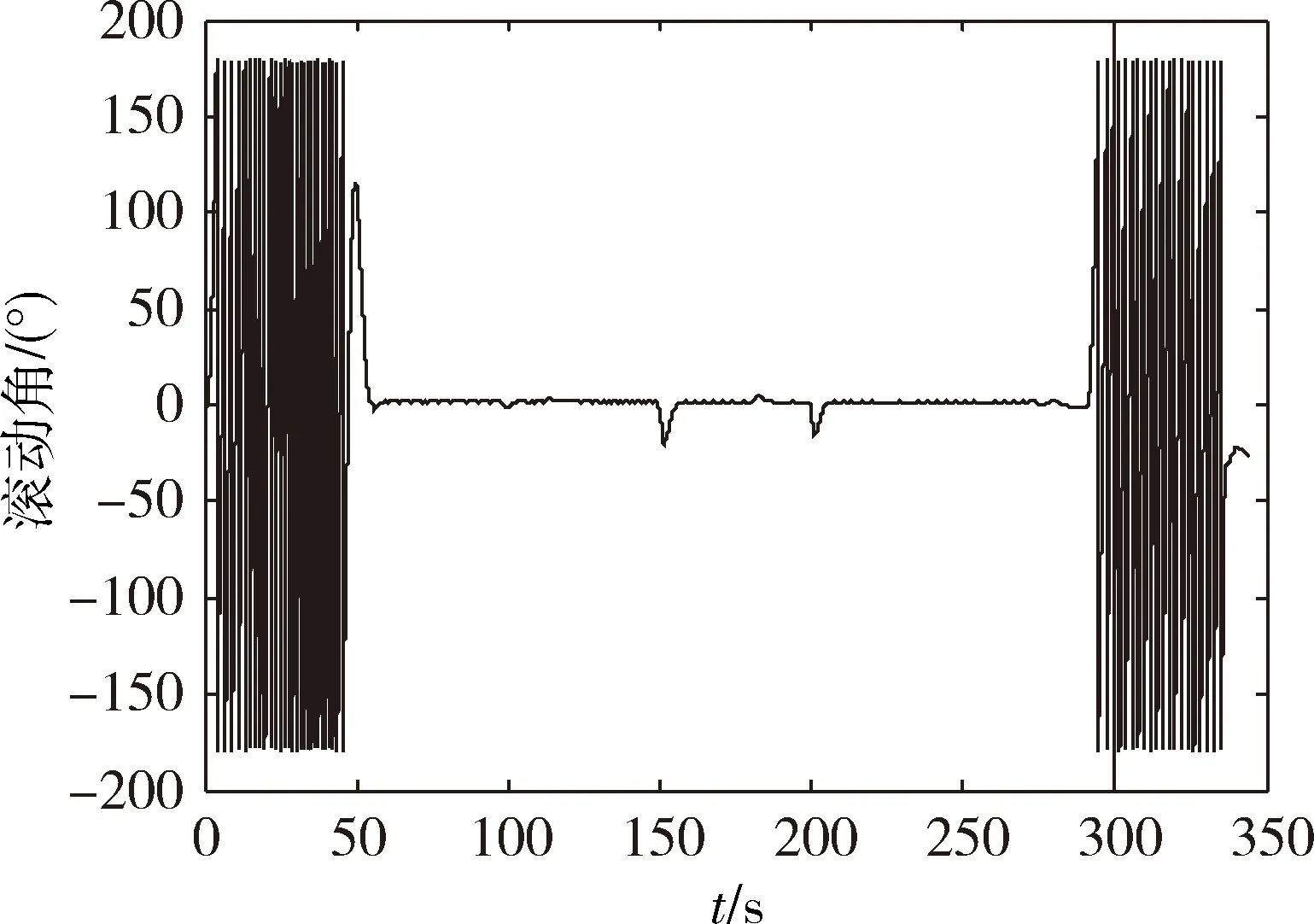
圖11 滾動角控制響應
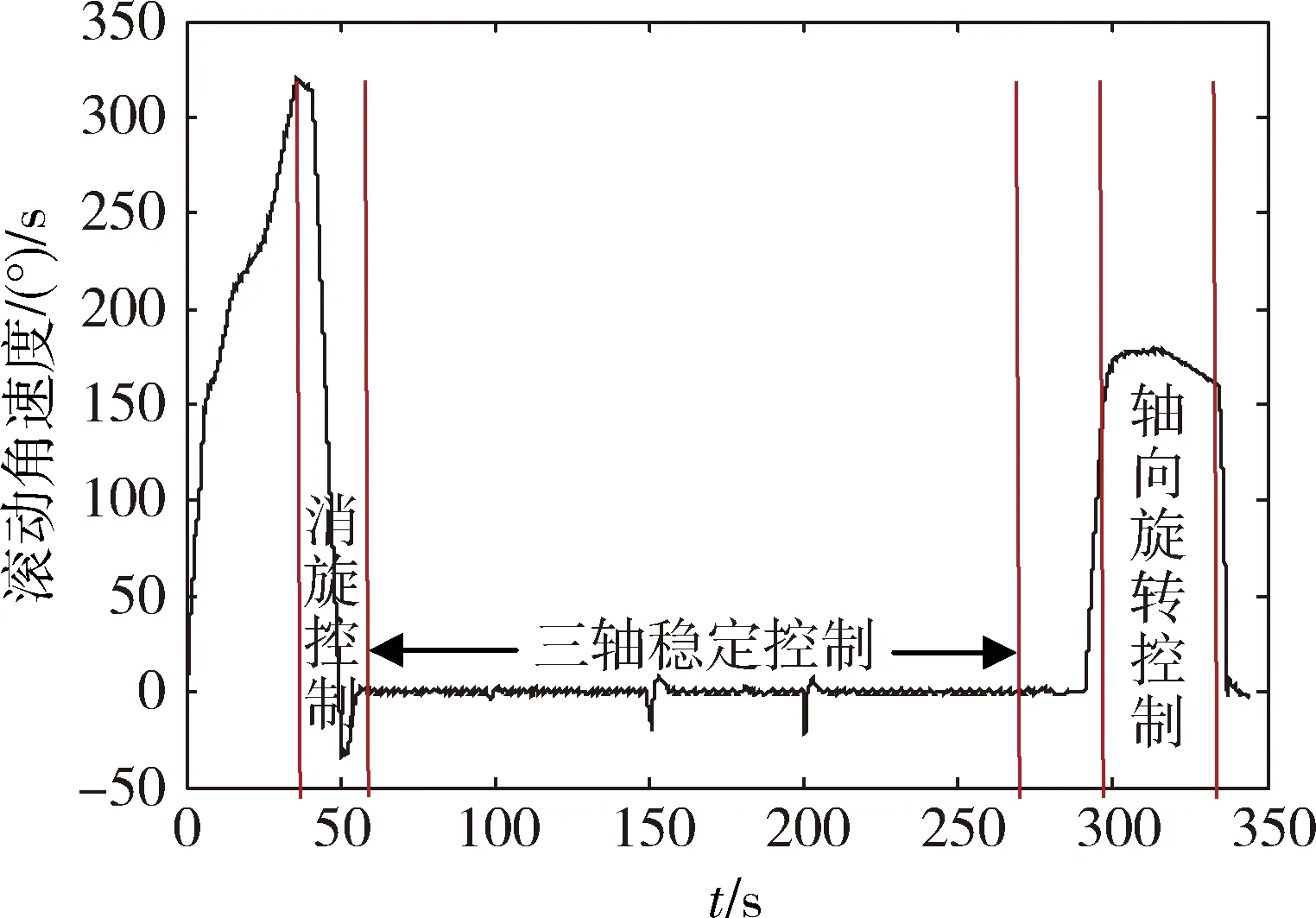
圖12 滾動角速度控制響應
圖7~12中,方框標記處為在三軸穩定控制模式中施加的人工干擾,從物理仿真曲線可以看出,在改進的偽速率控制作用下,姿態很快收斂到三軸穩定控制目標附近,說明箭頭姿態控制系統具有一定的抗干擾能力。此外,從仿真曲線還可以看出,在4個控制模式順序物理仿真過程中,模式切換靈活,每個控制模式控制穩定,箭頭姿態均收斂到控制目標附近。
從物理仿真的過程看,雙通道360°旋轉空間的三自由度氣浮轉臺能夠充分仿真探空火箭的姿態運動與控制過程,有效支撐了探空火箭姿態控制系統的設計與實現。
4 結論
本文闡述了利用雙通道360°旋轉空間、懸臂梁式三自由度氣浮轉臺構建探空火箭箭頭姿態控制系統物理仿真系統,該系統可以逼真模擬箭頭在飛行過程中的實際飛行動作,有效支撐了箭頭姿態控制系統在地面的功能驗證與性能測試,有效促進了探空火箭姿態控制技術的發展。
雙通道360°旋轉空間、懸臂梁式三自由度氣浮轉臺可以為細長型、繞縱軸旋轉類飛行器姿態控制系統提供很好的地面物理仿真環境,本文的研究成果對從事此類飛行器姿態控制技術研究、物理仿真研究有借鑒和應用價值。
參 考 文 獻
[1] 姜秀杰,劉波,于世強等. 探空火箭的發展現狀及趨勢[J]. 科技導報, 2009, 27(23):101-110.(Jiang Xiujie, Liu Bo, Yu Shiqiang, et al. Development Status and Trend of Sounding Rocket [J]. Science & Technology Review, 2009, 27(23): 101-110.)
[2] 卞春江、劉成、高東等. “鯤鵬1B”探空火箭箭頭平臺系統[C]. 第二十九屆全國空間探測學術研討會,拉薩,中國,2016.(Bian Chunjiang, Liu Cheng, Gao Dong, et al. The Payload Servicesystem of Kunpeng-1B Sounding Rocket[C]//29rd National Symposium on Space Exploration, Lhasa, China, 2016.)
[3] 高華宇,董云峰. 基于氣浮臺的小衛星姿態控制全物理仿真實驗系統[J]. 計算機測量與控制,2009,17(6):1153-1156.(Gao Huayu, Dong Yunfeng. Full- Physical Simulation Experiment System of Moonlet Attitude Control Based on Air Bearing Test-bed[J]. Computer Measurement & Control, 2009,17(6):1153-1156.)
[4] 李季蘇,牟小剛,等. 氣浮臺在衛星控制系統仿真中的應用[J]. 航天控制,2008,26(5):64-68.(Li Jisu, Mu Xiaogang, et.al. Application of Air Bearing Table in Satellite Control System Simulation[J]. Aerospace Control, 2008,26(5):64-68.)
[5] 李季蘇,牟小剛,張錦江. 衛星控制系統全物理仿真[J]. 航天控制,2004,22(2):37-45.(Li Jisu, Mu Xiaogang, Zhang Jinjiang. Physical Simulation for Satellite Control Systems[J]. Aerospace Control, 2004,22(2):37-45.)
[6] Agrawal B N, Rasmussen R E. Air-bearing-based Satellite Attitude Dynamics Simulator for Control Software Research and Development[C]. Aerospace/Defense Sensing, Simulation, and Control. International Society for Optics and Photonics, 2001:204-214.
[7] 屠善澄. 衛星姿態動力學與控制[M]. 宇航出版社,1998.
[8] Han Peng, Gao Dong, Li Yanli, Mao Bonian. ‘Kunpeng-1B’ Sounding Rocket’s Attitude Control Algorithm Using An Improved Pseudo Rate Modulator[J]. Journal of Beijing Institute of Technology (English Edition), 2016,25(4):21-25.
[9] 魯興舉. 空間飛行器姿態控制仿真試驗平臺系統研究與設計[D].國防科學技術大學研究生院,2005,11.(Lu Xingju. Research and Design of a Spacecraft Altitude Control Simulator System[D]. Graduate School of National University of Defense Technology,2005,11.)
[10] 張世杰,曹喜濱,王峰. 微小衛星姿態控制系統半物理仿真設計及驗證[J]. 中國空間科學技術,2005,25(6):43-50.(Zhang Shijie, Cao Xibin, Wang Feng. Design of Semi-physical System for Micro-satellite Attitude Control[J]. Chinese Space Science and Technology, 2005,25(6):43-50.)
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05