基于雙目單視面和結(jié)構(gòu)光的三維復(fù)原精度研究
2018-04-27 01:35:34黃治凡
傳感器與微系統(tǒng) 2018年5期
關(guān)鍵詞:特征
黃治凡, 徐 曉
(華南理工大學(xué) 物理與光電學(xué)院,廣東 廣州 510640)
0 引 言
以往的雙目立體視覺系統(tǒng)[1~3]的精度評(píng)估工作[4~6],未考慮物體在整個(gè)系統(tǒng)中不同位置所引起的精度差別,也未考慮在雙目情況下,相機(jī)的相對(duì)擺放對(duì)系統(tǒng)的精度影響。
本文基于雙目視覺和結(jié)構(gòu)光的三維測(cè)量的進(jìn)行了研究。在此基礎(chǔ)上,為利于工程應(yīng)用,將結(jié)構(gòu)光和雙目單視面[7]相結(jié)合,先用結(jié)構(gòu)光照射目標(biāo)物體,并利用雙目相機(jī)拍攝相應(yīng)圖像。通過圖片進(jìn)行三維復(fù)原時(shí),將物體所在三維直角坐標(biāo)轉(zhuǎn)換到一個(gè)特定的角度坐標(biāo)系統(tǒng),并在角度坐標(biāo)表征的空間中提取特征匹配點(diǎn)[8,9],通過匹配點(diǎn)擬合出三維目標(biāo)物的形狀。為了評(píng)估本文測(cè)量方式的精度,及測(cè)量待測(cè)物在不同位置的精度差異,將待測(cè)物分別置于不同位置,得到在不同位置的測(cè)量誤差;通過改變雙目相機(jī)的偏轉(zhuǎn)角度,得到在不同角度下測(cè)量精度的差別。對(duì)誤差進(jìn)行綜合分析,得到工程應(yīng)用所需的一般精度分布規(guī)律。
1 三維重建模型
雙目相機(jī)交叉放置,用張正友標(biāo)定法[10]對(duì)相機(jī)進(jìn)行標(biāo)定;利用結(jié)構(gòu)光照射待測(cè)物表面,雙目相機(jī)同時(shí)拍攝物體,得到一對(duì)圖像;對(duì)圖像恢復(fù)目標(biāo)物的三維信息[11]。如圖1所示為雙目相機(jī)等效模型,可依據(jù)其中幾何關(guān)系完成圖像像素坐標(biāo)到角度坐標(biāo)的轉(zhuǎn)換[12]。
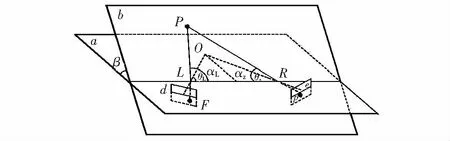
圖1 雙目相機(jī)等效模型
易知,對(duì)一個(gè)目標(biāo)點(diǎn)P,可以使用其對(duì)應(yīng)的αL,αR,β確定其在三維空間中的位置[13]。將2幅圖像進(jìn)行坐標(biāo)轉(zhuǎn)換后,使用其灰度值、灰度值的一、二階導(dǎo)數(shù)作為特征[14]進(jìn)行特征匹配。得到匹配點(diǎn),即獲得了物體上該點(diǎn)的αL,αR,β,利用三角關(guān)系,可以得到該點(diǎn)的三維坐標(biāo)[15]。具體的特征匹配及三維復(fù)原運(yùn)算參照文獻(xiàn)[7]。
2 精度評(píng)價(jià)模型
2.1 角度分辨率因素
坐標(biāo)αL,αR,β將三維空間劃分為許多立體小塊,認(rèn)為落在同一小塊中的點(diǎn)的αL,αR,β一致,將分辨不同點(diǎn)坐標(biāo)的能力稱作角度分辨率。
由于在不同β角下規(guī)律一致,因此,考慮在基平面上的角度分辨率公式。圖2所示為基平面上的角度坐標(biāo),L,R代表左右相機(jī)等效光心位置,陰影區(qū)域內(nèi)點(diǎn)的坐標(biāo)為(αL,αR,β),在縱深方向上Δy=ymax-ymin。
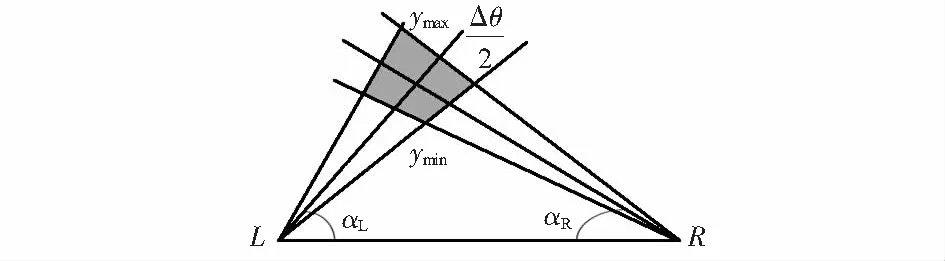
圖2 基平面角度關(guān)系
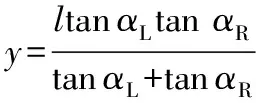
基平面各量間關(guān)系表示為
(1)
式中l(wèi)為基線長(zhǎng)度,即線段LR長(zhǎng)度;Δθ為劃分角度空間的步長(zhǎng)。由式(1)計(jì)算出的誤差變化情況如圖3所示。可以看出,在能夠絕對(duì)精確匹配物體特征的情況下,物體距離基線中心點(diǎn)越遠(yuǎn),復(fù)原精度越差。
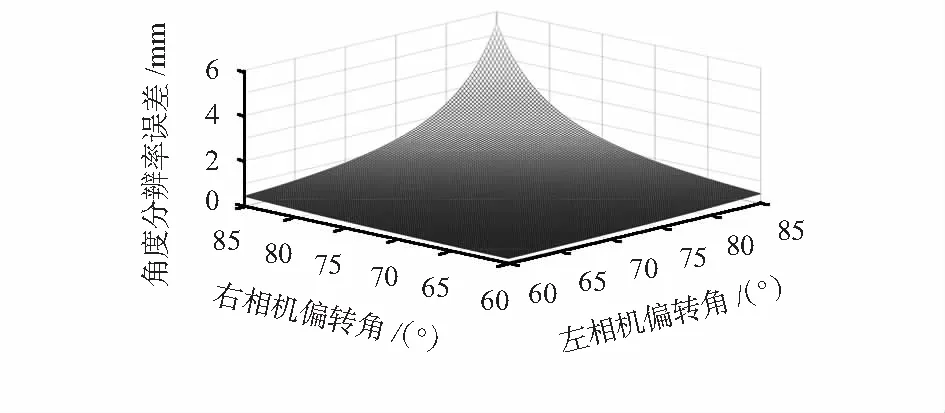
圖3 角度分辨率與相機(jī)偏轉(zhuǎn)角關(guān)系
2.2 匹配誤差因素
實(shí)際工程應(yīng)用中,為了簡(jiǎn)化物體形狀所帶來的匹配效果不確定性,選擇簡(jiǎn)單的圓形作為本模型的待測(cè)物,如圖4所示,圓O為基平面上一球體的俯視圖,L,R分別代表左右相機(jī)等效光心,點(diǎn)M為基線LR的中點(diǎn),LC,LD,RA,RB均為圓O切線。圓O在左相機(jī)成像的范圍為弧CD段,在右相機(jī)成像的范圍為弧AB段。
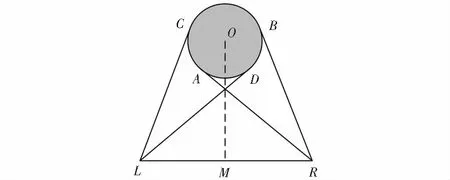
圖4 匹配誤差因素
運(yùn)用尋找特征點(diǎn)的方法進(jìn)行特征匹配,可以得到C點(diǎn)與A點(diǎn)為匹配點(diǎn),記V為匹配因素誤差,由三角關(guān)系得,匹配因素誤差V∝∠AOC=∠LOR,由此得知,待測(cè)物距離雙目相機(jī)越近,∠LOR越大,V越大,匹配誤差越大;反之,匹配誤差越小。
2.3 特征點(diǎn)大小變化因素
在工程應(yīng)用中,物體特征的選取應(yīng)該由實(shí)際工況所決定,以空間中一橫條特征為例。如圖5所示為基平面的俯視圖,L,R分別為左右相機(jī)等效光心。AB為一個(gè)待測(cè)物的特征,長(zhǎng)度5 mm。記A點(diǎn)坐標(biāo)(a,b),B點(diǎn)坐標(biāo)(c,d),那么AB對(duì)應(yīng)的左相機(jī)張角為
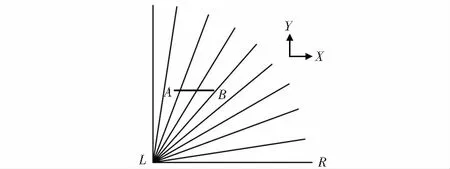
圖5 角度空間中的特征點(diǎn)
隨著AB在縱深方向移動(dòng),γ變化如圖6所示,表明,同一特征在距離相機(jī)較近時(shí)張角比較大;反之,較小。在特征點(diǎn)附近區(qū)域所對(duì)應(yīng)的空間尺寸不變的前提下,此區(qū)域?qū)?yīng)張角越大即占像素越多,匹配效果越好,反之,匹配效果越差。
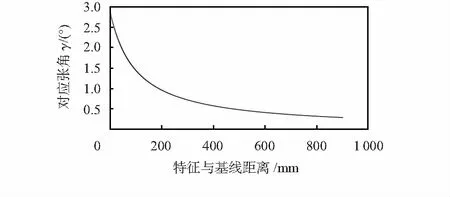
圖6 張角隨距離的變化關(guān)系
以上模型的理論分析表明:物體距離雙目相機(jī)中心點(diǎn)越近,角度分辨率越高;物體距雙目相機(jī)中心點(diǎn)越遠(yuǎn),特征點(diǎn)越易匹配;而物體距相機(jī)越近,特征點(diǎn)成像也變得越大,也更易匹配。
3 實(shí)驗(yàn)與結(jié)果分析
實(shí)驗(yàn)將2個(gè)200萬(wàn)像素的工業(yè)相機(jī)交叉置于水平工作臺(tái),兩相機(jī)的距離200 mm。選擇待測(cè)物為一個(gè)硅膠表面的水瓶,初始位置為兩相機(jī)連線中垂線,距離為400 mm,激光器將線結(jié)構(gòu)光投影到水瓶上。將采集到的每對(duì)圖像的結(jié)構(gòu)光區(qū)域分別用上述匹配方法進(jìn)行特征匹配,得到大量匹配散點(diǎn),通過匹配點(diǎn)擬合出三維目標(biāo)物的形狀。
3.1 空間中不同位置誤差
雙目相機(jī)的距離設(shè)為200 mm,左相機(jī)角度為74.71°,右相機(jī)角度為71.51°,待測(cè)物的初始位置距離基線360 mm,將待測(cè)物按照等步長(zhǎng)置于實(shí)驗(yàn)臺(tái)的不同位置,并且保證結(jié)構(gòu)光照射到物體的同一位置。使用雙目相機(jī)采集圖像。將采集的圖像經(jīng)過畸變校正后采用三維復(fù)原算法,得到所有光條的三維信息。將置于初始位置的光條作為標(biāo)準(zhǔn),計(jì)算所有光條與標(biāo)準(zhǔn)光條間距離,并與理論值比較,得到的值為絕對(duì)誤差。如圖7所示。
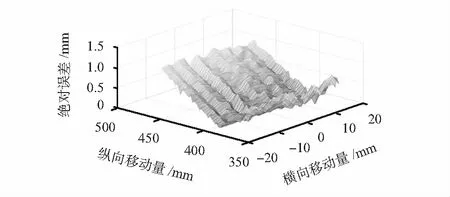
圖7 待測(cè)物在空間不同位置的誤差
由此得出:待測(cè)物距離雙目相機(jī)較近時(shí),匹配因素占主導(dǎo),匹配的難度增加,導(dǎo)致測(cè)量誤差變大。當(dāng)距離增加到一定程度時(shí),匹配難度與角度分辨率相互制約,測(cè)量誤差逐漸降低;當(dāng)距離繼續(xù)增加時(shí),角度分辨率占主導(dǎo),導(dǎo)致測(cè)量誤差再一次增加。由上述特征點(diǎn)大小變化的因素與匹配因素及分辨率因素三者共同作用,使得整個(gè)誤差曲線在細(xì)部呈現(xiàn)不規(guī)律波動(dòng)。
由以上實(shí)驗(yàn)可知,在雙目相機(jī)的角度固定的情況下,將待測(cè)物置于凝視點(diǎn)附近時(shí),可以獲得比較高的精度。通過改變凝視點(diǎn)的位置來驗(yàn)證該結(jié)論。
3.2 不同凝視點(diǎn)條件下中軸線上的誤差
改變雙目相機(jī)的偏轉(zhuǎn)角度以改變凝視點(diǎn)的深度,設(shè)置條件如表1。
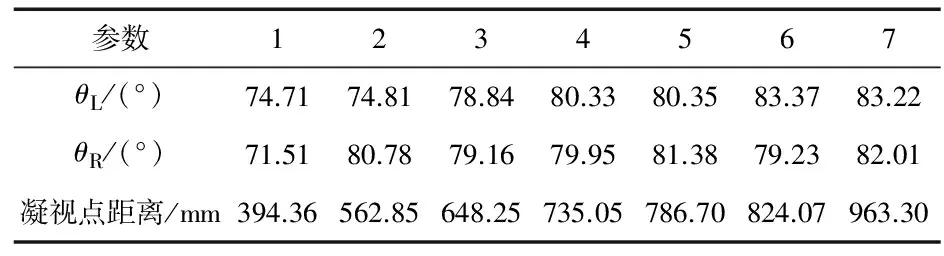
表1 雙目相機(jī)位置參數(shù)
在不同凝視點(diǎn)的條件下,將物體等步長(zhǎng)地置于中軸線上,計(jì)算還原的光條與標(biāo)準(zhǔn)光條的距離,并與理論值進(jìn)行比較,實(shí)驗(yàn)結(jié)果如圖8所示。
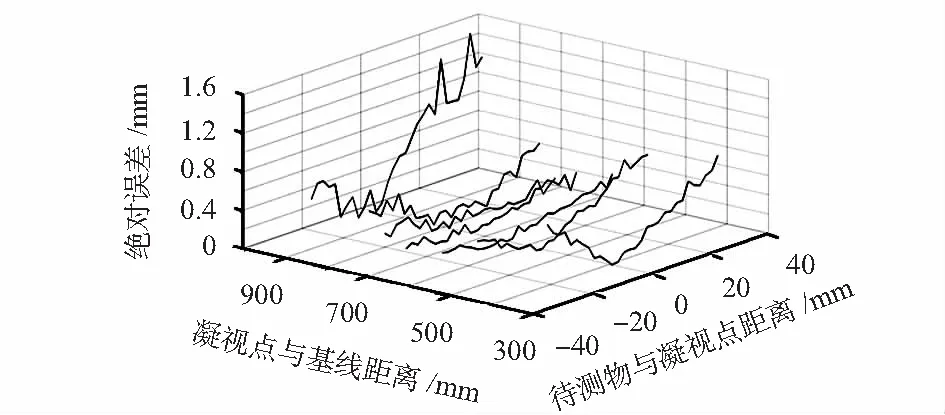
圖8 不同凝視點(diǎn)的條件下中軸線上不同位置的誤差
可以看出,隨著凝視點(diǎn)由近到遠(yuǎn)逐漸變化,整體的誤差由大變小再變大。將在不同凝視點(diǎn)條件下的誤差的平均值用三次多項(xiàng)式進(jìn)行擬合,大致可以得到,當(dāng)雙目相機(jī)的凝視點(diǎn)的位置由400 mm變化至900 mm的過程中,平均測(cè)量誤差先減小后增加,如圖9所示。
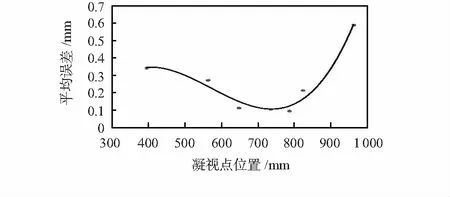
圖9 不同凝視點(diǎn)的誤差擬合
通過以上實(shí)驗(yàn)可以得出,在本文系統(tǒng)的相機(jī)條件下,偏轉(zhuǎn)角度在71°~84°范圍內(nèi),凝視點(diǎn)變化在400~900 mm范圍內(nèi)的前提下,凝視點(diǎn)最佳的距離約737 mm。在此凝視點(diǎn)條件下,平均誤差為0.106 9 mm左右。圖8中擬合所得經(jīng)驗(yàn)表達(dá)式如下
error=(1.326 8×10-8)y3-(2.275 2×10-5)y2+
0.011 9y-1.626 5
(2)
4 結(jié) 論
本文利用雙目單視面的原理,通過測(cè)定結(jié)構(gòu)光的光條的位置,解算還原物體三維信息;為檢測(cè)此方法所還原的三維信息的精度,通過模型分析,測(cè)定處于不同位置的光條的三維信息,并解算精度。在測(cè)定過程中相機(jī)的參數(shù)也作了相應(yīng)變化,尤其通過調(diào)整雙目相機(jī)的交叉放置角度和有效物距來改變雙目相機(jī)的凝視點(diǎn)位置,以便合理評(píng)估相關(guān)精度。得到了影響復(fù)原算法的精度的3點(diǎn)因素:角度分辨率、匹配效果、像素所對(duì)應(yīng)的實(shí)物的大小;在給定的條件下,測(cè)量精度能達(dá)到0.1 mm。
整個(gè)實(shí)驗(yàn)中,待測(cè)物表面漫反射情況直接影響到匹配效果;同時(shí),激光器的功率跟激光的粗細(xì)對(duì)實(shí)驗(yàn)結(jié)果也有比較大的影響;而攝像機(jī)的光學(xué)系統(tǒng),以針孔相機(jī)方式為模型,實(shí)際上,光學(xué)系統(tǒng)的光斑彌散,也會(huì)影響定位效果。在以后的工程模型中,需要進(jìn)一步精細(xì)考慮。
參考文獻(xiàn):
[1] 于之靖,王 威,王 爍,等.十字線結(jié)構(gòu)光雙目視覺測(cè)量的在線匹配方法[J].半導(dǎo)體光電,2017,38(3):445-450,458.
[2] Howarth P A.The geometric horopter[J].Vision Research,2011,51(4):397-9.
[3] Vojnikovic′ B,Tamajo E.Horopters-Definition and construc-tion[J].Collegium Antropologicum,2013,37( supl1):9-12.
[4] 沈 彤,劉文波,王 京.基于雙目立體視覺的目標(biāo)測(cè)距系統(tǒng)[J].電子測(cè)量技術(shù),2015,38(4):52-54.
[5] 全燕鳴,黎淑梅,麥青群.基于雙目視覺的工件尺寸在機(jī)三維測(cè)量[J].光學(xué)精密工程,2013,21(4):1054-1061.
[6] 李 偉.基于線結(jié)構(gòu)光的火車輪對(duì)外徑三維檢測(cè)技術(shù)研究[D].武漢:華中科技大學(xué),2007.
[7] 王 珊,徐 曉.基于雙目單視面的三維重建[J].光學(xué)學(xué)報(bào),2017(5):199-207.
[8] Weisman M J.Parameterized surface models for binocular stereo vision[M].Cambridge:Harvard University,1996.
[9] Sun J,Ma H,Zeng D.Three-dimensional infrared imaging method based on binocular stereo vision[J].Optical Engineering,2015,54(10):103-111.
[10] 劉 艷,李騰飛.對(duì)張正友相機(jī)標(biāo)定法的改進(jìn)研究[J].光學(xué)技術(shù),2014,40(6):565-570.
[11] 劉 振.基于結(jié)構(gòu)光的雙目立體成像技術(shù)研究[D].成都:中國(guó)科學(xué)院研究生院(光電技術(shù)研究所),2013.
[12] 阮秋琦.數(shù)字圖像處理學(xué)[M].2版.北京:電子工業(yè)出版社,2007.
[13] 汪同浩,劉秉琦,陳一超,等.平行式雙目立體系統(tǒng)基線長(zhǎng)度的選取[J].半導(dǎo)體光電,2017,38(4):614-617.
[14] 張潔玉.圖像局部不變特征提取與匹配及應(yīng)用研究[D].南京:南京理工大學(xué),2010.
[15] Zhang K,Xu B,Tang L,et al.Modeling of binocular vision system for 3D reconstruction with improved genetic algorithms[J].International Journal of Advanced Manufacturing Technology,2006,29(7-8):722-728.
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(bào)(2020年2期)2020-04-01 03:50:40
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38