INS控制量輔助GNSS卡爾曼跟蹤環路方法
2017-09-18 01:01:12叢麗,岳崧,李瑾,金天
探測與控制學報 2017年4期
關鍵詞:卡爾曼濾波
叢 麗,岳 崧,李 瑾,金 天
(1.北京航空航天大學電子信息工程學院, 北京 100191;2.北京臨近空間飛行器系統工程研究所空間物理重點實驗室,北京 100076)
INS控制量輔助GNSS卡爾曼跟蹤環路方法
叢 麗1,岳 崧1,李 瑾2,金 天1
(1.北京航空航天大學電子信息工程學院,北京100191;2.北京臨近空間飛行器系統工程研究所空間物理重點實驗室,北京100076)
針對高動態環境下鎖相環易失鎖、跟蹤不穩定的情況,提出了INS控制量輔助GNSS卡爾曼跟蹤環路的方法。該方法利用INS和GNSS計算多普勒頻率的變化率,并將該加速度信息作為控制量與卡爾曼濾波器進行融合,疊加到卡爾曼濾波器的狀態量上,起到輔助跟蹤環路的作用。仿真實驗以及數據分析表明,該方法可顯著提高載波環的動態性能以及接收機的定位測速精度,在高動態環境下,相較于INS輔助傳統環路的算法,使用INS輔助卡爾曼環路時定位誤差減少2%~3%,測速誤差減少4%~72%。
全球衛星導航系統;INS控制量;高動態;鎖相環;卡爾曼環路;加速度輔助
0 引言
隨著現代軍事應用對導航系統的精度以及動態性能要求的不斷提高,采用全球衛星導航系統(Global Navigation Satellite System, GNSS)以及慣性導航系統(Inertial Navigation System, INS)構成組合導航系統,可以克服相互的缺點,做到優勢互補,已成為當前導航領域的一個研究熱點。作為接收機最薄弱的環節,鎖相環極易受到載體動態的影響[1],高動態下,衛星信號變化劇烈,多普勒頻率偏移快,環路易失鎖。為了提高環路的動態性能,需要增加環路帶寬,而這樣同時會導致更多頻率成分的噪聲的引入而降低環路對信號跟蹤的精確度[2]。采用INS輔助GNSS載波跟蹤環路的方法可以有效解決上述問題,通過INS輔助載波環路去除載體大部分動態,可以減小環路帶寬從而承受更多噪聲。
由于卡爾曼濾波器自身估計誤差的特性具有與載波環跟蹤環節的一致性與契合度[3],使用卡爾曼濾波器代替傳統跟蹤環路的濾波環節(又稱為卡爾曼環路)為GNSS接收機的跟蹤提供了一種新思路,近幾年已有學者對此做過一些相關研究[4-6]。但是,使用傳統的卡爾曼環路,在高動態情況下仍然存在一定的局限性。本文針對上述問題,提出了INS控制量輔助GNSS卡爾曼跟蹤環路的方法。
1 基于卡爾曼濾波的跟蹤環路原理
載波環通常使用鎖相環(Phase Locked Loop, PLL),它由一個鑒相器、一個環路濾波器以及一個壓控振蕩器(Numerical Controlled Oscillator, NCO)構成,而環路濾波器是其中最重要的部分。將卡爾曼濾波技術應用于GNSS接收機跟蹤環路,往往采用卡爾曼濾波器代替傳統環路中的濾波器,目標在于在通道中設計一個前置濾波器,可同時完成載波相位和載波頻率的跟蹤,因此狀態量一般為載波相位、多普勒頻率的跟蹤誤差以及多普勒頻率變化率[7]。
根據觀測量選取方式的不同,卡爾曼環路模型的建立形式分為兩種:第一種方法是直接選取相干積分輸出的IQ值作為觀測量;第二種方法是選取環路鑒別器輸出的相位誤差作為觀測量[8]。第一種方法選取IQ值來估計估計環路參數的誤差,滿足了卡爾曼濾波器對于噪聲特性為白噪聲的需求;而第二種方法由于IQ值經過了非線性的鑒相器函數,觀測量的噪聲協方差不是白噪聲而會導致一些相應的損耗,但是直接采用相位誤差作為觀測量,與第一種方法相比大大簡化了觀測矩陣的設計難度以及復雜度。因此在這里,我們使用第二種方法設計環路,其結構如圖1所示。
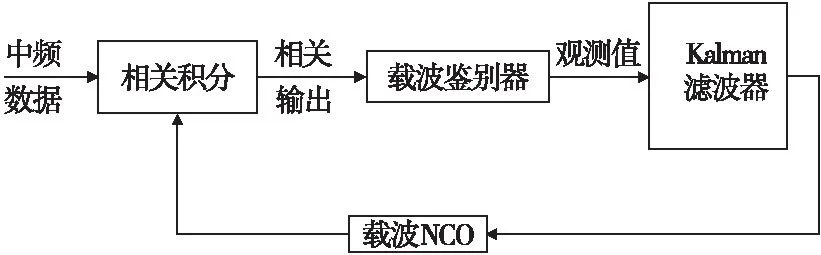
圖1 基于卡爾曼的跟蹤環路結構圖Fig.1 The structure of Kalman filter-based tracking loop
2 INS控制量輔助卡爾曼環路原理
目前,使用INS輔助環路的主要方式是利用INS信息計算出多普勒的頻率進行輔助,但是在實際情況下,對接收機載波環跟蹤性能的影響,大部分是由多普勒頻率的變化率決定的,而與多普勒頻率無關。這個多普勒的變化率是由載體動態以及其他因素如晶振誤差、噪聲等引起,其中載體動態是主要因素。因此在這里我們采用加速度輔助載波環的方式,利用INS信息計算出多普勒頻率的變化率,再將其以控制量的形式加入到卡爾曼環路中。
根據第二節建立的環路模型,當采用加速度輔助的方式時,選取三階的卡爾曼環路。此時,狀態量包含了相位維、頻率維和頻率變化率,實際上等價于傳統的三階環路。當根據INS信息計算出加速度信息之后,采用的INS輔助策略是將多普勒頻率的變化量隨時間疊加到頻率誤差上。圖2為輔助卡爾曼環路的實現框圖。
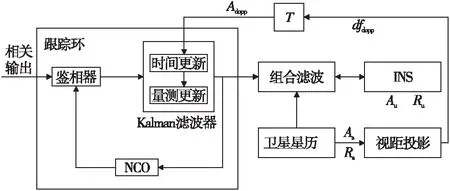
圖2 INS信息作為控制量輔助卡爾曼環路框圖Fig.2 The block diagram of INS control amount aided Kalman filter loop
多普勒頻移變化率由公式(1)計算得到[9]:
(1)
其中,λ為載波波長;Au為接收機在地心地固坐標系下的加速度矢量;As為衛星在地心地固坐標系下的加速度矢量;Ru為接收機在地心地固坐標系下的位置;Rs為衛星在地心地固坐標系下的位置。
T是環路的積分時間,輔助信息Afdopp表示在積分時間內的多普勒變化量,可表示為
Afdopp=dfdopp·T
(2)
3 引入輔助量的卡爾曼環路模型
卡爾曼濾波算法由一系列遞歸公式描述。其基本結構由狀態模型和觀測模型構成,其中主要涉及濾波模型建模和噪聲估計兩個方面,在引入INS的狀態量時,需要對系統的狀態方程做出相應調整。下面介紹卡爾曼跟蹤環路離散系統理論建模過程。
3.1 系統狀態方程模型
設tk時刻的被估計狀態Xk受系統噪聲序列Wk-1驅動,Xk表示tk時刻載波環狀態,并可以表示成為二階和三階的形式如下:

(3)

(4)

在環路中加入慣導輔助量時,即為加入了一個輸入控制矢量Uk。由于使用加速度輔助的方式,這里的控制矢量Uk為INS計算出的多普勒頻率的變化率。根據以上表述,環路的狀態方程可以表示為:
Xk+1=AXk+BUk+Wk
(5)
其中,A為狀態矩陣:
(6)

(7)
B矩陣可表示為:
(8)
(9)
式中,T表示環路的積分時間,Wk為系統激勵噪聲序列。這里,系統噪聲序列的方差陣可以表示為:
二階:
(10)
三階:

(11)
其中,qφ和qω表示針對于不同晶振類型的載波相位、載波頻率噪聲的功率譜密度,qa表示隨機游走噪聲針對于殘余視距加速度的功率譜密度。qφ和qω的表達式如下:
(12)
qω=2π2h-2
(13)
上式中h參數的取值取決于接收機使用的晶振類型,在GNSS系統中通常分為TCXO(Temperature-Compensated Oscillator)和OCXO(Oven-Controlled Oscillator)兩種,常用的取值情況在表1中給出[1]。
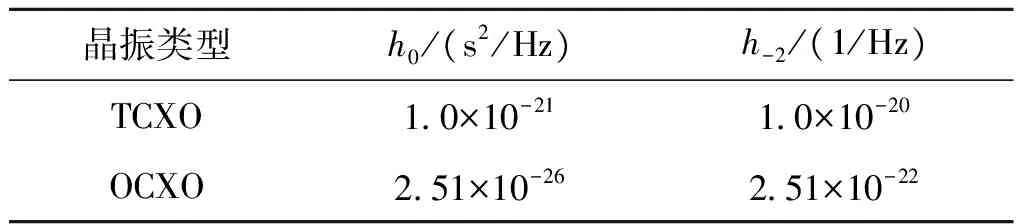
表1 晶振的h參數
3.2 量測方程模型
量測量為鑒相器輸出的相位誤差,包含在積分時間T內的平均載波相位以及高斯白噪聲vk。量測方程可以表示為:
Zk=HXk+vk
(14)
式中的量測矩陣H為
(15)
(16)
量測噪聲的方差陣R可以表示為:
(17)
其中,CN0表示信號的載噪比,通常的載噪比強度在40 dB-Hz以上。
4 軟件驗證分析
為了對INS輔助卡爾曼環路算法的性能進行驗證和分析,構建了軟件仿真平臺,模擬高動態軌跡,同時使用輔助傳統環路、輔助卡爾曼環路以及無輔助緊耦合卡爾曼環路情況進行了測試,并將定位測速精度、跟蹤性能的結果進行了比較。
4.1 仿真平臺的構建
軟件仿真平臺包括4個模塊:中頻信號模擬模塊、INS數據生成模塊、GNSS軟件接收機模塊以及組合濾波模塊,其結構框圖如圖3所示。該仿真實驗平臺采用Visual C++進行搭建,可對接收機抗干擾性能或靈敏度、動態性以及組合導航精度等各項性能指標進行軟件仿真環境下的分析和驗證。軟件仿真根據載體的各種運動形式產生GNSS信號不同觀測條件(包括衛星分布狀況、衛星數目)下的中頻數據和慣性器件的原始數據。
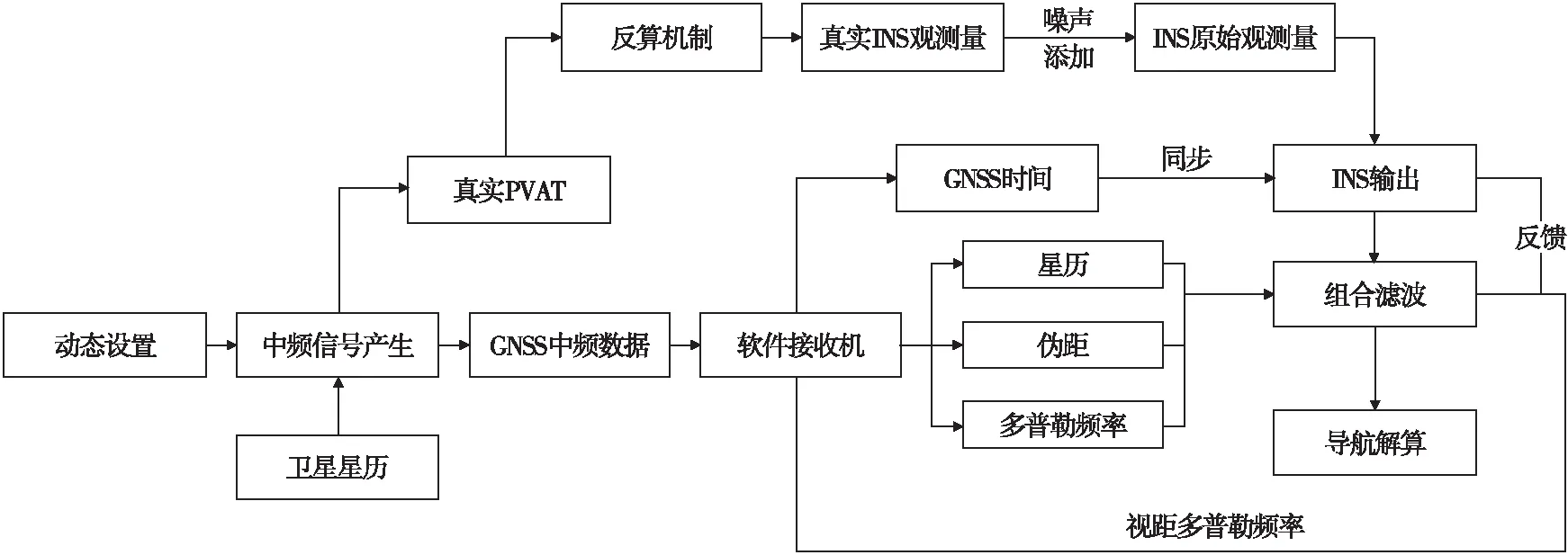
圖3 軟件仿真平臺框圖Fig.3 The block diagram of software simulation platform
中頻數據模擬模塊,在設置載體的動態之后,根據衛星星歷,生成載噪比可控制的GNSS中頻數據,同時輸出載體的運動軌跡。
INS數據生成模塊,根據中頻數據模擬模塊的真實軌跡,通過反算程序生成INS的陀螺儀和加速度計的數據。陀螺儀和加速度計輸出仿真數據的過程其實就是已知姿態角、位置、速度等信息,求解出陀螺儀和加速度計輸出。加入對應誤差量生成IMU原始測量值。
組合濾波模塊,利用GPS時保證INS數據與GNSS同步,通過INS計算載體的速度位置以及姿態,預測偽距、偽距率,結合接收機輸出的偽距、偽距率進行緊組合濾波,利用濾波后得到的位置信息和根據衛星星歷得到的衛星的軌道信息,以及INS的加速度信息計算信號的多普勒的變化率,把計算得到的輔助信息送進接收機的跟蹤環路中,完成輔助。并且,利用組合濾波后得到的定位測速信息,對慣導進行反饋校正,以提高INS的輸出精度。
軟件接收機模塊,主要是對信號進行處理,包括捕獲、跟蹤、位同步、幀同步以及導航解算等,導航解算出導航電文,輸出位置、速度、偽距、偽距率等參數。
這里,由于卡爾曼環路以及傳統環路之間的差別只在于載波環的濾波器一級,因此上述的軟件仿真平臺可以同時適用于INS信息輔助卡爾曼環和傳統環的兩種算法的驗證和對比。
4.2 仿真實驗及結構分析
4.2.1仿真條件說明
載體動態設置為:仿真時間150 s,載體軌跡為直線運動,航向為正東,橫滾角、俯仰角均為0。載體最大速度8 300 m/s,最大加速度50g,最大加加速度5g/s。陀螺漂移誤差10(°)/h,加速度計偏置誤差1 mg。載體的加速度與速度曲線分別如圖4(a)、圖4(b)所示,衛星分布圖如圖5所示。
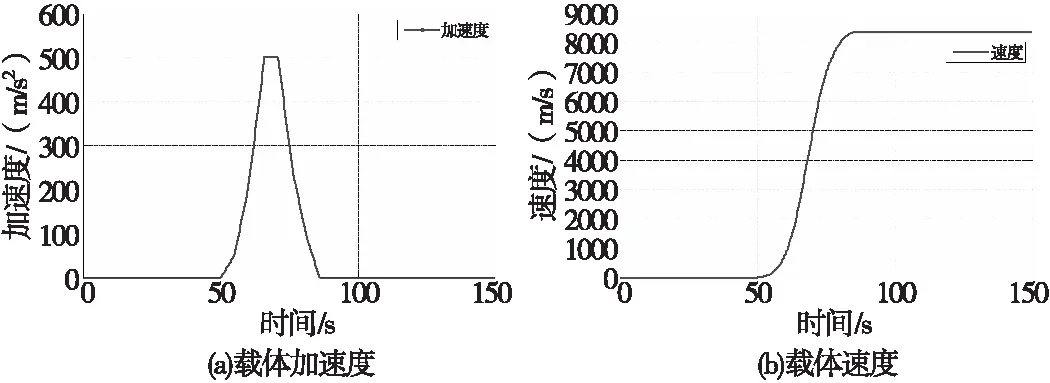
圖4 載體動態情況Fig.4 The dynamic of the carrier
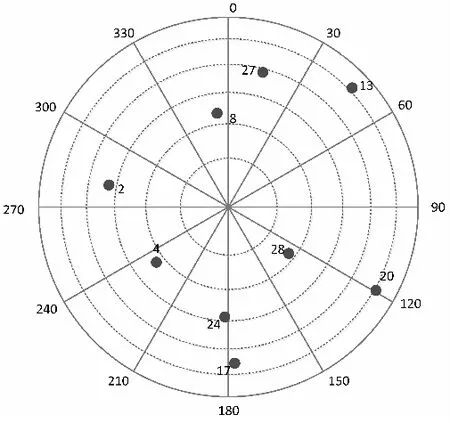
圖5 衛星分布圖Fig.5 The sky plot of the trajectory
4.2.2仿真結果分析
1)跟蹤性能分析為了對INS輔助卡爾曼環路的算法性能進行評估,在本節將其與另外兩種算法進行了對比,分別是INS輔助傳統環路以及緊耦合算法(即無INS輔助的卡爾曼環)。環路參數設置為帶寬15 Hz,積分時間1 ms。這里采用的性能評估方式為鑒相器輸出和鎖定因子(Phase Lock Indicator, PLI)。其中PLI表達式為
(18)

在給定的動態條件下,20號星三種算法的鑒相器以及鎖定因子輸出分別如圖6和圖7所示。
由圖6和圖7中20號衛星在三種算法下的鑒相器輸出以及相應鎖定因子值的對比中我們可以看出,在只使用緊耦合算法(即無INS輔助的卡爾曼環)的情況下,當載體存在加速度以及加加速度的動態變化時,會導致環路的穩定性產生一定的波動,但是仍處于正常的跟蹤門限內;在使用了INS加以輔助的情況下,由于輔助信息去除了環路中的大部分動態,環路可以在高動態時仍然保證穩定跟蹤;而對比傳統環輔助以及卡爾曼環路輔助則可以發現,使用INS信息輔助卡爾曼環路時,無論是鑒相器輸出還是鎖定因子,都體現出了比INS輔助傳統環更優的穩定性。
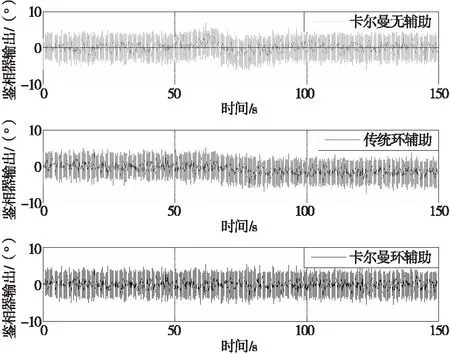
圖6 三種算法20號星鑒相器輸出對比Fig.6 The phase discriminator output for SV20
2)定位測速誤差分析
為了定量分析INS輔助卡爾曼環路算法對跟蹤性能的提高,分析了三種算法對于給出軌跡的定位測速誤差如圖8、圖9所示,同時在表2中給出三種算法的定位測速誤差情況的比較。
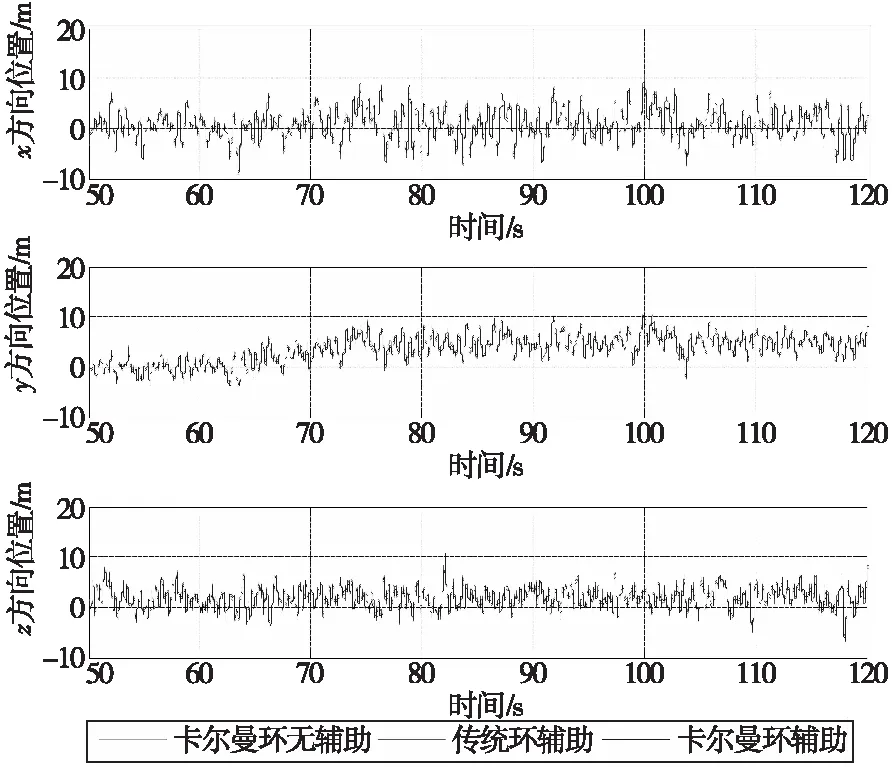
圖8 三種算法的定位誤差比較Fig.8 Position errors of thethree methods
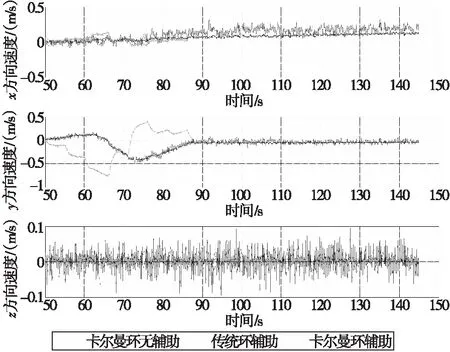
圖9 三種算法的測速誤差比較Fig.9 Velocity errors of thethree methods
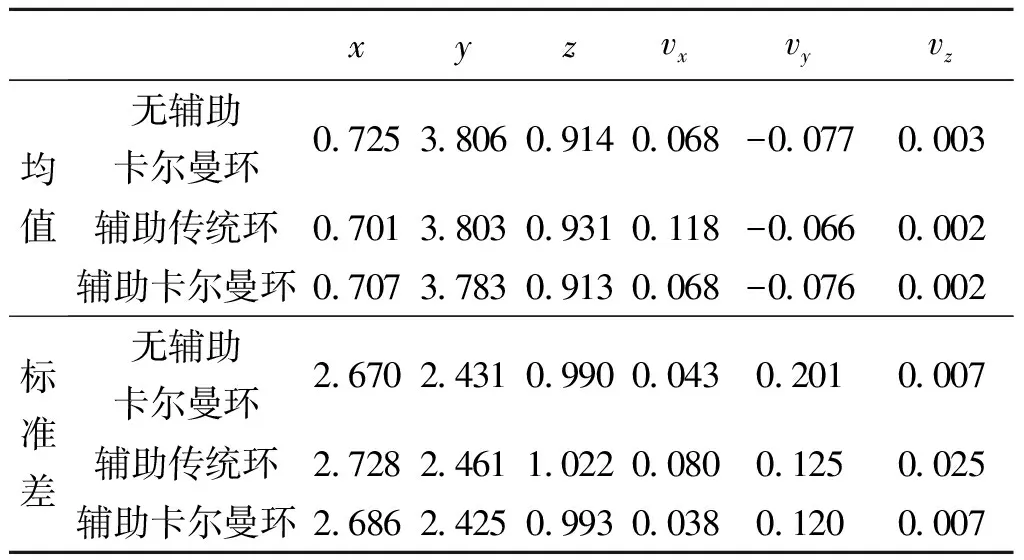
xyzvxvyvz均值無輔助卡爾曼環0725380609140068-00770003輔助傳統環0701380309310118-00660002輔助卡爾曼環0707378309130068-00760002標準差無輔助卡爾曼環267024310990004302010007輔助傳統環272824611022008001250025輔助卡爾曼環268624250993003801200007
對比圖8、圖9中使用INS輔助傳統環和輔助卡爾曼環的定位測速誤差曲線可以看出,在定位方面,三種算法的定位精度無明顯差別;測速方面,INS輔助卡爾曼環的性能則要明顯優于其余兩種算法,這是由卡爾曼濾波算法自身的特性決定的。
從表2中我們可以看出,首先輔助環路的算法無論在定位還是測速方面都優于無輔助的卡爾曼環路緊耦合算法,提升了接收機的精度;對比兩種輔助環路的方法則可以看出,定位精度方面兩種算法相似,但INS輔助卡爾曼環的算法仍略優于輔助傳統環,定位誤差減少2%~3%,而在測速方面INS輔助卡爾曼環路的算法優勢明顯,測速誤差相較于輔助傳統環路算法減少了4%~72%。
5 結論
本文提出了INS控制量輔助GNSS卡爾曼跟蹤環路方法。該方法利用INS和GNSS計算多普勒頻率的變化率,并將該加速度信息作為控制量與卡爾曼濾波器進行融合,疊加到卡爾曼濾波器的狀態量上,起到輔助跟蹤環路的作用。仿真實驗以及數據分析表明,該方法可顯著提高載波環的動態性能以及接收機的定位測速精度,在高動態環境下,相較于INS輔助傳統環路的算法,使用INS輔助卡爾曼環路時定位誤差減少2%~3%,測速誤差減少4%~72%。本文只分析了在高動態下的算法特性,而針對存在干擾的復雜環境下的算法性能,還需要進一步分析和驗證。
[1]O’Driscoll C, Petovello M G, Lachapelle G. Choosing the coherent integration time for Kalman filter-based carrier-phase tracking of GNSS signals[J]. GPS solutions, 2011, 15(4): 345-356.
[2]謝鋼. GPS原理與接收機設計[M]. 北京: 電子工業出版社, 2009: 266-302.
[3]O’Driscoll C, Lachapelle G. Comparison of traditional and Kalman filter based tracking architectures[C]//Proceedings of European navigation conference. 2009: 3-6.
[4]Psiaki M L, Jung H. Extended Kalman filter methods for tracking weak GPS signals[C]//Proceedings of the 15th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2002). Portland, Oregon: ION, 2002: 2539-2553.
[5]Petovello M G, Lachapelle G. Comparison of vector-based software receiver implementations with application to ultra-tight GPS/INS integration[C]//Proceedings of Institute of Navigation GPS/GNSS Conference. Fort Worth, TX: Institute of Navigation, 2006.
[6]WON J H, D?tterb?ck D, Eissfeller B. Performance Comparison of Different Forms of Kalman Filter Approaches for a Vector-Based GNSS Signal Tracking Loop[J]. Navigation, 2010, 57(3): 185-199.
[7]Tang X, Falco G, Falletti E, et al. Theoretical analysis and tuning criteria of the Kalman filter-based tracking loop[J]. GPS Solutions, 2015, 19(3): 489-503.
[8]Won J H, Pany T, Eissfeller B. Characteristics of Kalman filters for GNSS signal tracking loop[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4): 3671-3681.
[9]叢麗, 鄭智毅, 金天, 等. INS 加速度信息輔助 GPS 載波跟蹤方法研究[J]. 計算機工程與設計, 2012, 33(11): 4356-4361.
[10]Luo Y, Babu R, Wu W, et al. Double-filter model with modified Kalman filter for baseband signal pre-processing with application to ultra-tight GPS/INS integration[J]. GPS solutions, 2012, 16(4): 463-476.
MethodforKalmanFilter-basedINSControlAmountAidedGNSSTrackingLoop
CONG Li1, YUE Song1, LI Jin2, JIN Tian1
(1.School of Electronic and Information Engineering, Beihang University of Aeronautics and Astronautics, Beijing 100191,China; 2. Beijing Near Space Vehicle System Eugiueering Research Institate, Beijing 100076, China)
The carrier loop is unstable and easy to lose lock under high dynamic environment. To solve this, a method for Kalman filter-based INS control amount aided GNSS tracking loop was proposed in this paper. The rate of Doppler frequency is calculated with GNSS and INS information and was used as a control amount to fuse with the Kalman filter and added on the state quantities. Simulation experiments were conducted and the data were analyzed, which indicated that the proposed method could significantly improve the dynamic performance of the carrier tracking loop and the accuracy of the receiver. Under high dynamic environment, the position error was decreased by 2% to 3% and velocity error by 4% to 72% when compared with the traditional INS-aided method.
GNSS;INS control amount;high dynamic;carrier loop;Kalman filter-based loop;acceleration aiding
2017-01-26
:國家自然科學基金項目資助(61471017,41374137)
:叢麗(1981—),女,黑龍江安達人,博士后,講師,研究方向:衛星導航、組合導航、戰術綜合電子系統等。E-mail: congli_bh@buaa.edu.cn。
TP391
:A
:1008-1194(2017)04-0043-06
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36