汽車電動助力制動系統(tǒng)摩擦建模與補償控制*
2017-07-21 01:21:44何睿吳堅高吉
汽車工程 2017年6期
何睿,吳堅,高吉
(吉林大學(xué),汽車仿真與控制國家重點實驗室,長春130025)
汽車電動助力制動系統(tǒng)摩擦建模與補償控制*
何睿,吳堅,高吉
(吉林大學(xué),汽車仿真與控制國家重點實驗室,長春130025)
汽車電動助力制動系統(tǒng)是典型的機(jī)電伺服系統(tǒng),摩擦作為機(jī)電系統(tǒng)中普遍存在的非線性效應(yīng),是影響電動助力制動系統(tǒng)控制質(zhì)量的主要因素。本文中建立了LuGre摩擦模型來表征系統(tǒng)的摩擦特性,并采用遺傳算法進(jìn)行摩擦模型的參數(shù)辨識,并通過臺架試驗進(jìn)行了驗證。最后,將摩擦模型應(yīng)用到電動助力制動系統(tǒng)的補償控制中,實車試驗結(jié)果驗證了電動助力制動系統(tǒng)控制的有效性。
電動助力制動系統(tǒng);LuGre摩擦模型;參數(shù)辨識;PID控制
前言
近年來,采用電機(jī)驅(qū)動主缸活塞從而產(chǎn)生制動力的制動系統(tǒng)成為汽車領(lǐng)域新的研究熱點。目前,國外大的汽車零部件公司都進(jìn)行了相關(guān)的產(chǎn)品研發(fā),如博世iBooster、日產(chǎn)e-ACT和LSP公司的IBS等[1-2]。國內(nèi)各大高校也展開相關(guān)的理論研究和功能樣機(jī)的研發(fā)[3-4]。
電動助力制動系統(tǒng)一般由電機(jī)作為動力源,通過減速增矩機(jī)構(gòu)和運動轉(zhuǎn)換機(jī)構(gòu)將電機(jī)力轉(zhuǎn)化為主缸推桿的推力從而和駕駛員一起促動主缸產(chǎn)生制動壓力。電動助力系統(tǒng)是一個復(fù)雜的機(jī)-電伺服控制系統(tǒng),在這種系統(tǒng)中,摩擦對系統(tǒng)性能的影響不容忽視。摩擦對電動助力制動系統(tǒng)的影響,主要集中在兩個方面:一是機(jī)構(gòu)運動過程中產(chǎn)生的摩擦力會和正常的力疊加在一起影響反饋控制;二是摩擦?xí)箼C(jī)構(gòu)控制過程中出現(xiàn)抖動現(xiàn)象[5]。
為了消除摩擦對電動助力制動系統(tǒng)控制的影響,建立準(zhǔn)確的摩擦模型進(jìn)行補償是亟需解決的關(guān)鍵問題。基于摩擦模型進(jìn)行控制補償是較廣泛采用的一種方法[6-7],本文中通過對電動助力制動系統(tǒng)的傳動機(jī)構(gòu)進(jìn)行摩擦特性分析,建立了LuGre摩擦模型來表征系統(tǒng)的摩擦特性,并通過遺傳算法對摩擦模型的參數(shù)進(jìn)行辨識,結(jié)合臺架試驗對模型進(jìn)行了驗證,最后進(jìn)行了電動助力制動系統(tǒng)摩擦補償控制策略的研究。
1 系統(tǒng)結(jié)構(gòu)與工作原理
本文中針對小型電動車,進(jìn)行了電動助力制動系統(tǒng)的開發(fā),結(jié)構(gòu)原理如圖1所示。電動助力制動系統(tǒng)包括制動踏板、踏板轉(zhuǎn)角傳感器、電機(jī)、蝸輪蝸桿、齒輪齒條、制動主缸和制動輪缸等幾大部分。其工作原理:電子控制器(圖中未畫出)根據(jù)踏板轉(zhuǎn)角傳感器采集的駕駛員輸入信號來判斷駕駛員的意圖,然后通過控制電機(jī)產(chǎn)生助力轉(zhuǎn)矩,并經(jīng)過蝸輪蝸桿和齒輪齒條傳動機(jī)構(gòu)傳遞到主缸推桿上,從而和駕駛員踩踏板的力一同作用促使主缸產(chǎn)生制動力,實現(xiàn)制動助力功能。
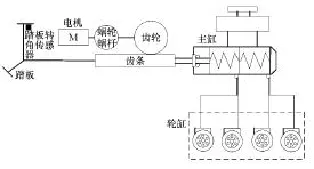
圖1 電動助力制動系統(tǒng)結(jié)構(gòu)原理圖
2 摩擦模型與參數(shù)辨識
2.1 LuGre摩擦模型
電動助力制動系統(tǒng)的控制核心和難點是系統(tǒng)的摩擦補償,因此須分析系統(tǒng)的摩擦特性即速度與力的對應(yīng)關(guān)系。如果系統(tǒng)摩擦是黏性摩擦,基本上就是比例關(guān)系;但由于機(jī)械機(jī)構(gòu)本身特性及加工安裝誤差,系統(tǒng)還存在其他非線性因素,例如庫倫摩擦、遲滯損失等。這些非線性因素使速度和力的關(guān)系呈現(xiàn)較強的非線性,可能使踏板感覺不連續(xù),助力很難補償。因此,建立準(zhǔn)確的摩擦模型,表征電動助力系統(tǒng)機(jī)構(gòu)的摩擦特性,并對摩擦帶來的非線性進(jìn)行補償,對系統(tǒng)的控制非常重要。
電動助力制動系統(tǒng)工作過程中的摩擦具有動態(tài)特性,具體表現(xiàn)為低速時的爬行、去程與回程時的摩擦滯后和不同位置的可變最大靜摩擦力。其中,低速爬行是由于蝸輪蝸桿和齒輪齒條機(jī)構(gòu)在速度較低時動摩擦和靜摩擦切換時的黏滑運動導(dǎo)致的;摩擦滯后是由于電動助力機(jī)構(gòu)在解除助力時,踏板需要回位,這時電動助力機(jī)構(gòu)的運動方向發(fā)生改變,由于回程時的摩擦力不同于去程時的摩擦力,因此會產(chǎn)生一個摩擦滯環(huán);可變最大靜摩擦力是指最大靜摩擦力與齒輪齒條的位置和運動速率有關(guān),并不是一個定值。因此,本文中采用了LuGre摩擦模型來表征系統(tǒng)的非線性摩擦特性[8]。
LuGre摩擦模型可用作控制中的摩擦補償模型,因為它包含大部分的靜態(tài)和動態(tài)摩擦特性,包括Stribeck效應(yīng)、摩擦滯后和可變最大靜摩擦力等[9]。
LuGre模型的原理:兩個表面之間的摩擦界面被認(rèn)為是鬃毛之間的聯(lián)系,鬃毛下表面的剛度大于上表面。當(dāng)有切向力作用時,鬃毛會像彈簧一樣偏轉(zhuǎn),表征出摩擦力。如果切向力足夠大,則鬃毛偏轉(zhuǎn)到一定程度就會變?yōu)橄鄬瑒印?/p>
設(shè)鬃毛的平均變形為z,則摩擦力F和鬃毛的變形狀態(tài)z可表示為

式中:σ0為剛性系數(shù),N/mm;σ1為黏性阻尼系數(shù),N·s/mm;σ2為黏性摩擦系數(shù),N·s/mm;Fs為靜摩擦力,N;vs為Stribeck速度,m/s;Fc為庫倫摩擦力,N;v為鬃毛上下表面間的相對速度,m/s。
2.2 基于遺傳算法的摩擦模型參數(shù)辨識
在LuGre摩擦模型中,z是不可測量的內(nèi)部變量,同時,模型中使用的參數(shù)的測量也十分困難,因此,可通過基于試驗數(shù)據(jù)的離線參數(shù)辨識方法獲得。本文中通過遺傳算法進(jìn)行LuGre摩擦模型的參數(shù)辨識[10-11],首先對LuGre摩擦模型進(jìn)行離散化:
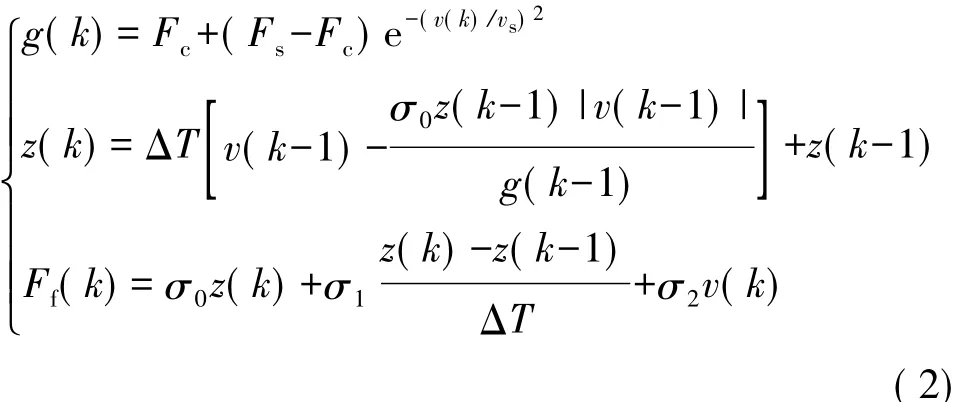
式中:ΔT為采樣間隔時間;k為當(dāng)前的采樣時刻。遺傳算法辨識原理如圖2所示。

圖2 遺傳算法辨識原理
圖中:u(k)為系統(tǒng)的輸入;y(k)為系統(tǒng)輸出實際觀測值;ye(k)為估計模型計算值;e(k)為估計誤差,e(k)=y(k)-ye(k)。為獲得滿意的過渡過程動態(tài)特性,對該特性進(jìn)行優(yōu)化,要求最小化的目標(biāo)函數(shù)是估計誤差平方的積分:

令x=[vsFcFsσ0σ1σ2]作為個體,采用隨機(jī)取樣保留最優(yōu)個體的方法,設(shè)種群大小為M,f(xi)為個體適應(yīng)度函數(shù),則有下式成立:遺傳算法的計算過程如圖3所示。


圖3 遺傳算法流程圖
2.3 摩擦特性測試試驗
為了進(jìn)行LuGre摩擦模型的參數(shù)辨識,本文中進(jìn)行了電動助力制動系統(tǒng)的摩擦特性測試,通過搭建試驗臺測量電動助力制動機(jī)構(gòu)中的踏板行程和摩擦力的關(guān)系。具體測試方案如圖4所示,踏板推桿與蝸輪蝸桿和齒輪齒條傳動機(jī)構(gòu)(簡稱一體化機(jī)構(gòu))之間、一體化機(jī)構(gòu)與主缸活塞推桿之間均安裝有力傳感器,同時通過拉線式位移傳感器測量踏板推桿位移,通過壓力傳感器測量主缸和輪缸壓力。一體化機(jī)構(gòu)兩端的兩個力傳感器記錄機(jī)構(gòu)的輸入和輸出的力。兩個力傳感器的差值減去系統(tǒng)的慣性力即表征系統(tǒng)的摩擦力。
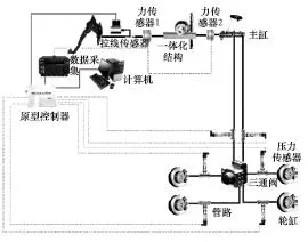
圖4電動助力制動系統(tǒng)摩擦特性測試原理
圖5 為測量的系統(tǒng)的輸入與輸出的力差和踏板推桿位移的時間歷程。然后利用測量的數(shù)據(jù),采用上節(jié)所述的遺傳算法進(jìn)行LuGre模型的參數(shù)辨識。
采用遺傳算法辨識出最優(yōu)摩擦模型參數(shù)為x=[0.8 50 100 50 5 2.2]。
2.4 摩擦模型試驗驗證
確定LuGre摩擦模型的參數(shù)后,通過試驗驗證模型的有效性,試驗同樣采用如圖4所示的試驗平臺,分別進(jìn)行如下3種工況的摩擦力估計和測試。
(1)斷續(xù)推進(jìn)工況,即駕駛員分段踩下踏板,使齒條前進(jìn)一段位移。重復(fù)此過程,以表征齒條在不同位置時的可變最大靜摩擦力。
(2)準(zhǔn)靜態(tài)推進(jìn)工況,即駕駛員緩慢踩制動踏板,并踩到底,然后松開制動踏板,以表征系統(tǒng)的庫倫摩擦力。
(3)快速踩踏板工況,即駕駛員快速踩制動踏板并松開,以表征系統(tǒng)的黏性摩擦和慣性力總和。
圖6~圖8為LuGre摩擦模型在上述3種典型工況下的估計值和實際測量值的結(jié)果。
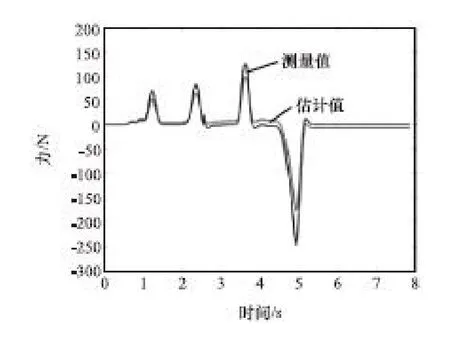
圖6 斷續(xù)推進(jìn)模式下的辨識結(jié)果
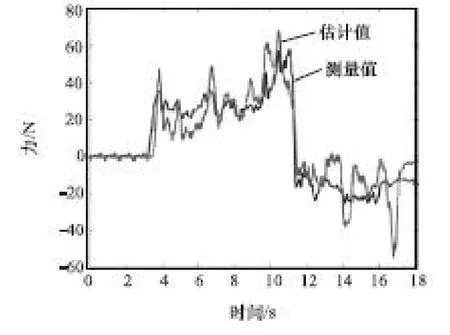
圖7 準(zhǔn)靜態(tài)模式下的辨識結(jié)果
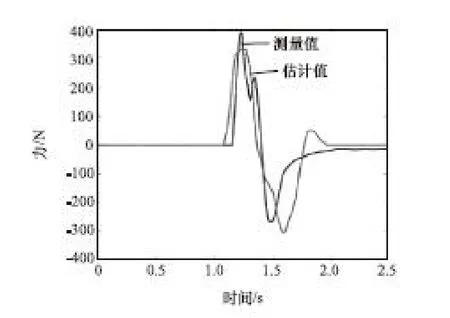
由圖可見,LuGre摩擦模型基本上能表征電動助力機(jī)構(gòu)中的摩擦特性,且通過遺傳算法辨識出的摩擦模型參數(shù)也比較準(zhǔn)確。不過,LuGre摩擦模型估計的摩擦力與實際測量的結(jié)果有一定的誤差,這是由于實際測量值也并非系統(tǒng)精確的摩擦力而是包含了其他非線性因素,然而這些因素的影響相對較小。因此,本文中提出的LuGre摩擦模型可以作為電動助力系統(tǒng)控制過程中的摩擦補償。
3 摩擦補償控制策略
3.1 助力控制策略
為驗證基于LuGre摩擦模型的控制補償效果,本文中采用如圖9所示的助力控制策略。該控制策略是通過控制電機(jī)電流來控制電機(jī)的驅(qū)動轉(zhuǎn)矩,從而控制制動主缸產(chǎn)生的制動壓力。電機(jī)的控制采用電流閉環(huán)控制,而電機(jī)的目標(biāo)電流通過基本助力曲線和前饋補償產(chǎn)生。其中,基本助力曲線通過制動踏板推桿位移信號判斷目前駕駛員的制動意圖,從而確定助力電機(jī)所需要的目標(biāo)電流。由于機(jī)械系統(tǒng)摩擦帶來的非線性,僅僅靠基本助力曲線不能保證目標(biāo)電流的正確性。因此,為克服摩擦帶來的阻力矩,通過前饋補償對目標(biāo)電流值進(jìn)行修正,從而克服機(jī)械系統(tǒng)的摩擦阻力矩,使主缸壓力能快速、平穩(wěn)地跟隨制動踏板推桿位移信號變化。前饋補償包括速度補償,慣性補償和摩擦補償。其中,速度和慣量補償電流通過試驗獲得,摩擦補償電流通過本文中建立的LuGre摩擦模型獲得,補償后的目標(biāo)電流引入1階慣量環(huán)節(jié),用來防止目標(biāo)電流在狀態(tài)切換時產(chǎn)生波動。
基本助力電流為

其中

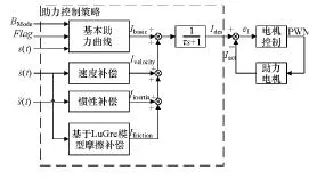
圖9 電動助力制動系統(tǒng)控制策略

本文中采用PID控制方式進(jìn)行電機(jī)的閉環(huán)控制。根據(jù)實際電流與目標(biāo)電流偏差,經(jīng)過PID控制器調(diào)整電機(jī)的占空比信號Dm(t):

從而控制電機(jī)產(chǎn)生目標(biāo)的助力轉(zhuǎn)矩。
3.2 實車試驗驗證
為了驗證摩擦補償控制,本文中搭建實車測試平臺,將電動助力制動系統(tǒng)安裝在某小型電動車上,如圖10所示,通過MicroAutoBox作為傳感器信號采集及控制信號輸出,采用RapdiPro作為直流電機(jī)驅(qū)動及電流采集模塊。利用上位機(jī)軟件ControlDesk實時監(jiān)測和在線調(diào)試參數(shù)。
電動助力制動系統(tǒng)助力補償控制的結(jié)果如圖11所示。本文中試驗用的小型電動車最高車速為55km/h,試驗工況選取其常用工況,即在車輛速度達(dá)到40km/h時,踩制動踏板,直到車輛停止,解除
式中:BMode為制動模式,0為無制動,1為傳統(tǒng)制動,2為緊急制動;Flag為助力的狀態(tài),1為駕駛員踩下制動踏板,0為保持制動,-1為解除制動;BR(s(t))為助力比,BR1(s(t))和BR2(s(t))分別為正常制動和緊急制動時的助力比;Fdepress(s(t))和Frelease(s(t))分別為踩下踏板和松開踏板時踏板推桿位移s(t)的函數(shù);KT為電機(jī)轉(zhuǎn)矩系數(shù),N·m/A。其中,標(biāo)志位的判斷方法為:首先計算上一時刻的制動踏板推桿位移s(k-1)和本時刻的制動踏板推桿位移s(k)差Δs,如果Δs大于某個閾值Δs1,則Flag=1,表示駕駛員正在進(jìn)行制動;如果Δs小于某個閾值Δs2,則Flag=-1,表示駕駛員正在解除制動;如果Δs介于Δs1和Δs2之間,則Flag=0,表示駕駛員正在保持制動,Δs1和Δs2值通過大量試驗取得,本文取Δs1= 0.23mm,Δs2=0.3mm。速度補償和摩擦補償對應(yīng)表達(dá)式為

式中:Kv為速度補償系數(shù),N·s;Ffriction為通過LuGre摩擦模型估算的摩擦力,N。由于機(jī)構(gòu)轉(zhuǎn)動慣量較小,計算過程中忽略不計。
因此,總助力電流可以表達(dá)為制動。

圖10 電動助力制動系統(tǒng)裝車實物圖

圖11 助力補償控制效果
由圖可見:在同樣的試驗工況下,在踏板推桿位移到最大值時,無摩擦補償?shù)哪繕?biāo)電流值比有補償控制時低,此時由于機(jī)械系統(tǒng)的摩擦阻尼特性,主缸壓力上升遲滯較大,且達(dá)不到需求的制動壓力;加入了摩擦補償控制后,在給定的目標(biāo)電流下,電機(jī)的實際電流可以很好地跟隨目標(biāo)電流,主缸壓力也可很好地跟隨制動踏板位移的變化,去程和回程沒有明顯的摩擦滯后現(xiàn)象發(fā)生,可見摩擦補償助力控制策略的有效性。
4 結(jié)論
為反映電動助力制動系統(tǒng)中摩擦力的Stribeck效應(yīng)、摩擦滯后和可變最大靜摩擦等靜態(tài)和動態(tài)特性,本文中建立了LuGre摩擦模型來表征系統(tǒng)的摩擦特性。通過試驗采集系統(tǒng)輸入和輸出的力差與踏板推桿位移的關(guān)系曲線,然后采用遺傳算法對LuGre摩擦模型的參數(shù)進(jìn)行辨識,其中,遺傳算法采用估計誤差平方的積分最小作為過渡過程動態(tài)特性優(yōu)化目標(biāo)。然后對辨識結(jié)果進(jìn)行了的試驗驗證,試驗結(jié)果表明,在斷續(xù)推進(jìn)工況、準(zhǔn)靜態(tài)推進(jìn)工況和快速踩踏板工況下,本文中建立的LuGre摩擦模型均能比較準(zhǔn)確地表征電動助力機(jī)構(gòu)中的摩擦特性。
本文中將建立的LuGre摩擦模型用在電動助力制動系統(tǒng)的摩擦補償控制中。助力控制策略采用前饋摩擦補償和電機(jī)PID反饋控制相結(jié)合的方法。最后,通過實車試驗進(jìn)行了控制策略的驗證,結(jié)果表明,主缸的壓力可很好地跟隨制動踏板推桿位移的變化,去程和回程沒有明顯的摩擦滯后現(xiàn)象發(fā)生,顯示出摩擦補償助力控制策略的有效性。
[1]OHTANI Y,INNAMI T,OBATA T,et al.Development of an electrically-driven intelligent brake unit[C].SAE Paper 2011-01-0572.
[2]FUJIKI N,KOIKE Y,ITO Y,et al.Development of an electrically-driven intelligent brake system for EV[C].SAE Paper 2011-39-7211.
[3]王治中,于良耀,王語風(fēng),等.分布式電液制動系統(tǒng)執(zhí)行機(jī)構(gòu)液壓控制[J].清華大學(xué)學(xué)報(自然科學(xué)版),2013(10):1464-1469.
[4]余卓平,徐松云,熊璐,等.集成式電子液壓制動系統(tǒng)魯棒性液壓力控制[J].機(jī)械工程學(xué)報,2015,51(16):22-28.
[5]向紅標(biāo),譚文斌,李醒飛,等.基于LuGre模型的自適應(yīng)摩擦補償[J].機(jī)械工程學(xué)報,2012,48(17):70-74.
[6]王曉東,焦宗夏,謝劭辰.基于LuGre模型的電液加載系統(tǒng)摩擦補償[J].北京航空航天大學(xué)學(xué)報,2008,34(11):1255-1257.
[7]周金柱,段寶巖,黃進(jìn).LuGre摩擦模模型對伺服系統(tǒng)的影響與補償[J].控制理論與應(yīng)用,2008,25(6):990-993.
[8]FEYEL P,DUC G,SANDOU G.LuGre friction model identification and compensator tuning using a differential evolution algorithm[C].Differential Evolution(SDE),2013 IEEE Symposium on.IEEE,2013:85-91.
[9]FREIDOVICH L,ROBERTSSON A,SHIRIAEV A,et al.LuGremodel-based friction compensation[J].Control Systems Technology,IEEE Transactions on,2010,18(1):194-200.
[10]JIANG B,WANG B W.Parameter estimation of nonlinear system based on genetic algorithm[J].Control Theory and Applications,2000,17(1):150-152.
[11]郭彥青,付永領(lǐng),張朋.一種新型LuGre摩擦模型參數(shù)辨識方法[J].機(jī)床與液壓,2015(1):149-152.
Modeling and Compensation Control for Friction in Vehicle Power Assisted Braking System
He Rui,Wu Jian&Gao Ji
Jilin University,State Key Lab of ASCL,Changchun130025
The power assisted braking system(PABS)of vehicle is a typical electromechanical servo system,and friction,as a non-linear effect commonly existing in electromechanical system,is one of the main factors influencing the control quality of PABS.In this paper,a LuGre friction model is built for representing the friction characteristics of the system,and genetic algorithm is used to conduct the parameter identification of LuGre model,which is then verified by bench test.Finally,the LuGre model is applied to the compensation control of PABS,and the results of real vehicle test verify the control effectiveness of PABS.
power assisted braking system;LuGre friction model;parameter identification;PID control
10.19562/j.chinasae.qcgc.2017.06.012
*國家自然科學(xué)基金(51605185)和國家自然基金聯(lián)合基金(U1564211)資助。
原稿收到日期為2016年8月26日,修改稿收到日期為2016年12月13日。
吳堅,副教授,博士,E-mail:wujian@jlu.edu.cn。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
車主之友(2022年6期)2023-01-30 07:58:16
英語世界(2022年9期)2022-10-18 01:11:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
金橋(2020年9期)2020-10-27 01:59:44
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(shù)(2019年17期)2019-09-21 03:46:32
商周刊(2017年17期)2017-09-08 13:08:58