基于WIFI的煤礦井下機器人環境參數監測系統
2017-06-22 22:27:55楊宣賈存良
東方教育 2017年6期
楊宣+賈存良

摘要:以單片機為核心,設計了煤礦井下機器人環境參數采集、數據WIFI無線發送裝置的硬軟件。基于LabVIEW軟件編程,實現了數據WIFI無線接收、信息集成和圖形化顯示,可為煤礦礦難救援決策提供依據。
關鍵詞:煤礦井下機器人;WIFI無線傳輸;環境參數監測
1前言
我國的煤礦大多瓦斯濃度較高,瓦斯爆炸引發的礦難時有發生。瓦斯爆炸后,煤礦井下原有的瓦斯、溫度檢測裝置往往受到破壞而失去監測作用,因此事故地點環境參數未知,在此情況下貿然救援可能會引起次生災害,危及救援人員生命安全。
本文研究了煤礦井下機器人所處位置的環境參數監測問題。當發生礦難時,通過下放煤礦井下機器人到達事故現場,利用其所附帶的相關傳感器對瓦斯、溫度環境參數進行測取,然后通過WIFI無線方式將其傳送到救援中心,為救援決策提供依據。在摸清井下受災程度情況下,執行有針對性的救援措施,可以有效提升救援效率,增加被困人員的脫險可能性。
2系統結構
煤礦井下機器人環境參數采用傳感器進行數據采集,具體為為溫度、瓦斯(甲烷)氣體濃度。同時,為反映機器人是否傾倒,參數檢測裝置也需采集機器人傾角信息。單片機主要負責信息整合并通過串口發送指令操控無線WIFI模塊;WIFI模塊將采集到的數據由串口轉換成無線信號,實現上位機與數據采集裝置的數據通信。系統結構示意圖如圖1所示。
3 硬件設計及傳感器選型
3.1單片機選擇及其I/O口分配
單片機為環境參數采集裝置的核心,本文選用STC89C52單片機,其為8051內核的ISP系統可編程芯片,片內含有512字節RAM、8KB 閃存程序存儲器以及全雙工串行口等。
在STC89C52單片機的端口分配上,其P2.0、P2.1引腳為與AD芯片PCF8591進行I2C串行通信的接口SDA、SCL信號線;P3.7引腳連接一線制溫度傳感器DS18b20;P3.0、P3.1引腳連接WIFI模塊ESP8266。
3.2傳感器選型
(1)溫度傳感器DS18B20
溫度是煤礦井下環境的一個重要環境參數,尤其是瓦斯爆炸之后,井下可能還有火災蔓延,因此,溫度的檢測是必不可少的。溫度測量可選的傳感器種類較多,其中數字式半導體溫度傳感器因其使用方便、數字量輸出便于與微處理器相連而廣獲應用,本文選用一線制數字溫度傳感器DS18B20。
(2)角度傳感器
井下環境多變,道路崎嶇不平,為了識別機器人是否側翻,本設計中使用SCA60C單軸傾角傳感器反映當前機器人車身姿態,該傳感器傾角0-180°時對應的模擬電壓輸出為0.5-4.5V。
(3)氣體傳感器
瓦斯的存在對采礦及救援都將造成巨大的阻礙,是煤礦井下機器人最主要的受監測參數之一。瓦斯的主要成分是甲烷,MQ-5氣體傳感器對甲烷氣體有著不錯的靈敏度,因此本文采用MQ-5對瓦斯濃度進行檢測。
3.3 A/D轉換模塊PCF8591
PCF8591是一個4路模擬量輸入、I2C串行總線數字量傳輸的集成模數轉換器,通過對其A0、A1和A2引腳電平狀態的控制,可以方便的選擇4路模擬量中的1路對之進行8位數字量轉換。
3.4 WIFI模塊ESP8266
本模塊采用802.11 b/g/n無線協議,主頻支持80MHz和160 MHz,支持 RTOS;內置10 bit高精度ADC;內置TCP/IP協議棧;WiFi @ 2.4 GHz,支持WPA/WPA2安全模式等。本設計使用到的是以ESP8266為核心的貼片式模組ESP-01,其自帶3DBi 的PCB板載天線。
4 機器人環境參數采集程序設計
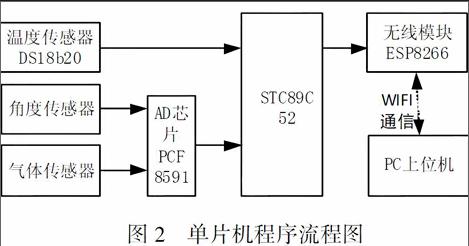
煤礦井下機器人通過傾角傳感器感知自身姿態,通過傳感器了解周圍環境關鍵參數,比如溫度、瓦斯濃度。采集數據之后,通過WIFI模塊傳輸數據到上位機進行處理以及顯示,其單片機程序流程圖如圖2所示。
為了實現以上各種功能,本程序使用了單片機定時器、中斷、串口等資源進行數據采集及發送。
本設計中軟件包括頭文件、變量的定義、程序聲明及各種程序初始化。通過AT指令對ESP8266進行模式控制,使之進入UDP模式,采用ESP8266最小系統接線方式,單片機可以通過串口進行無線收發控制。之后通過ADC轉換實現數據采集,并將數據通過WIFI傳到到上位機PC中。
WIFI模塊可以經由TTL-USB接口連接到PC機上,通過串口調試助手sscom4.2對其進行調試,首先利用AT+CIPSTART指令建立UDP服務器IP地址和端口號(如本系統中為61557),然后利用AT+CIPMODE設置透傳傳輸模式,最后利用AT+CIPSEND啟動數據發送,此時,單片機即可經由串口輸出經由WIFI模塊發送的數據。
5 上位機的設計
相較于VB、VC等文本語言,LabVIEW采用圖形化G語言進行編程,編程效率高,加之其擁有測控方面的豐富工具包,非常適合于本文上位機監測界面設計。
在LabVIEW中進行圖形化VI編程,主要為兩部分,一是UDP函數打開、UDP數據讀取和UDP關閉等,其作用是指定被監聽數據的網絡地址和端口號(如61577),并從UDP輸出接口輸出WIFI上傳數據;二是將接收到的數據整理并圖形顯示。完成以上兩個任務的LabVIEW程序如圖3所示。
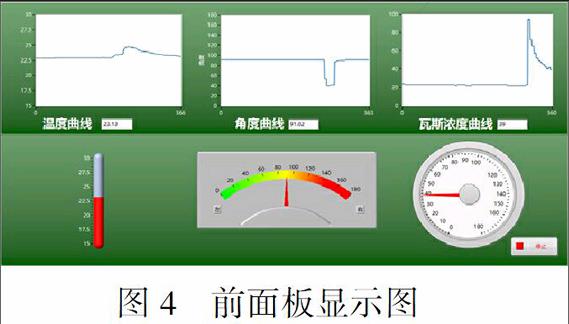
前面板顯示程序運行時如圖4所示,上部為環境參數曲線圖,下部為當前值對應棒圖和儀表式顯示方式。
6結語
本文設計了煤礦井下機器人環境參數監測裝置,給出了以單片機為核心的傳感器采集和WIFI無線傳輸硬、軟件設計,通過LabVIEW對接收的無線數據進行信息處理,實現了上位機煤礦井下機器人環境參數的直觀顯示。本文沒有涉及煤礦井下機器人的行走控制和WIFI傳輸中繼問題,對一個實用的系統來說,這些問題均需在后續的研究中完善解決。
參考文獻:
[1]王國慶,許紅盛,王愷睿. 煤礦機器人研究現狀與發展趨勢[J]. 煤炭科學技術,2014,02:73-77.
[2]周東健,張興國,李成浩. 多機器人系統協同作業技術發展近況與前景[J]. 機電技術,2013,06:146-150.