玻璃壁面清洗機器人負壓吸附系統的研究
2017-06-10 12:40:33程玉華袁艷芳潘越
科技創新與應用 2017年16期
程玉華+袁艷芳++潘越


摘 要:針對玻璃壁面清洗機器人風機噪聲大和吸附穩定性問題,通過變形設計和實驗研究方法,設計出適合玻璃壁面清洗的負壓吸附系統,并分析了負壓吸附原理,給出了與吸附系統相配合的最佳移動機構,并提出了低噪聲離心風扇設計方法。實驗表明所設計的負壓吸附系統能滿足玻璃壁面清潔與移動的基本需求,能夠適應高層建筑玻璃清洗的復雜環境。
關鍵詞:玻璃清洗;負壓吸附;離心風扇;噪聲污染
引言
壁面清洗機器人作為爬壁機器人的一種,主要在距離地面一定高度、人無法觸及的建筑物豎直表面上進行工作,如高層建筑玻璃幕墻的清洗。本文結合負壓吸附技術,針對低噪聲離心風扇、最佳吸附力的選取等方面進行研究,設計的機器人樣機能構適應高層建筑外壁面的工況環境。
1 壁面清洗機器人結構
圖1為玻璃壁面清洗機器人整體結構。機器人由運動機構、離心風扇、無刷電機、負壓腔、清洗裝置構成,通過遙控器實現遠距離無線通信。機器人接收到控制信號后,本體吸附在玻璃壁面并通過對角設置的運動機構實現移動與轉向。在機器人移動期間,機器人底部安裝的清洗抹布可以實現負壓腔的密封和玻璃壁面的清洗兩個功能。
1.運動機構;2.離心風扇;3.無刷電機;4.無線傳輸模塊;5.玻璃壁面;6.清洗裝置;7.負壓腔;8.無線遙控器
圖1 壁面清洗機器人機構示意圖
1.1 運動輪接觸應力分析
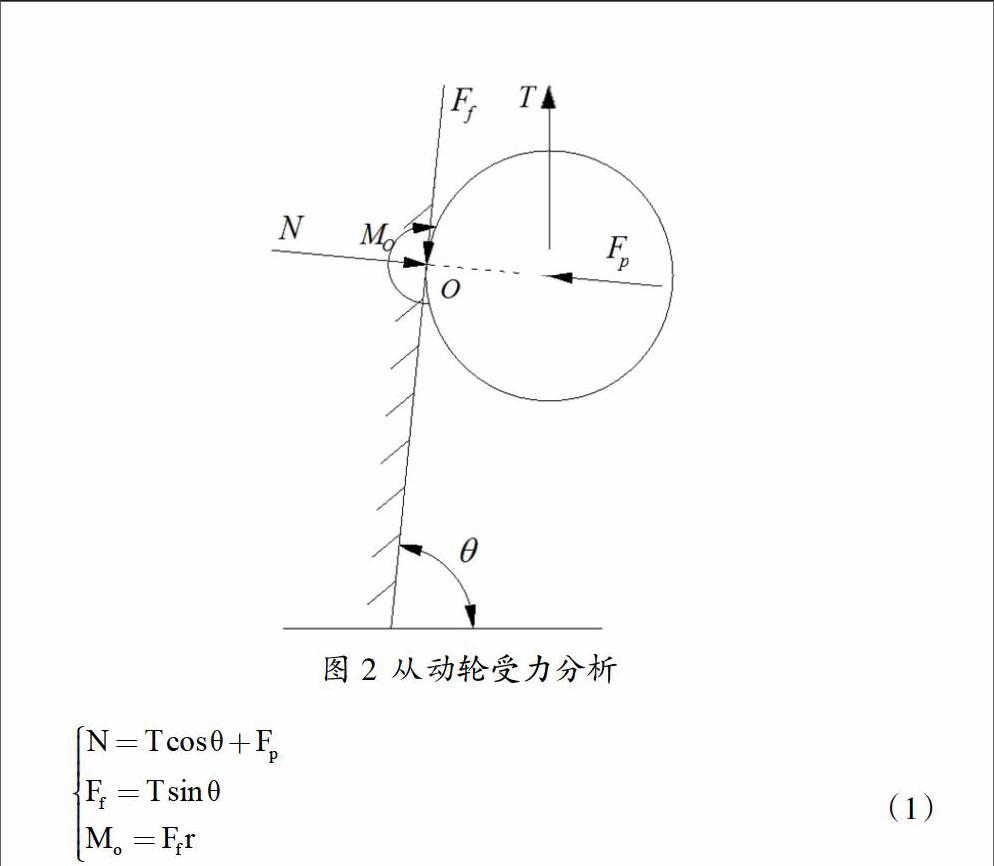
運動輪包含主動輪和被動輪,通過研究豎直玻璃壁面上主動輪和被動輪在滾動時表面的應力對運動的影響因素,確定運動機構構型和驅動方式。機器人通過運動輪在玻璃壁面移動,在運動輪表面會產生接觸應力。在機器人靜止時,運動輪產生的靜摩擦力可以平衡機器人自身的重力;當機器人處于運動狀態時,動摩擦力的運動方向與其運動性質有關。假設機器人與壁面剛性接觸、壁面存在一定傾角,從動輪受力情況如圖2所示。
當機器人在運動狀態時,根據從動輪的受力平衡情況,機器人在壁面上不會發生傾覆,可以得出力矩平衡方程:
(1)
式中,N-壁面對從動輪的反作用力;Fp-機器人本體作用在輪軸上的正壓力;Ff-壁面對從動輪的摩擦力;Mo-墻壁對從動輪的阻力矩;T-輪軸對從動輪的作用力;r-運動輪半徑。
從動輪的動摩擦力方向與機器人運動方向相反,起阻礙運動的作用。機器人的吸附系統能夠提供的最大吸附力為某一固定值,若機器人運動系統中存在從動輪,本質上浪費了一定的吸附力,離心風扇需要更高的轉數來維持機器人在壁面不發生傾覆,增大了負壓吸附系統的功率。因此本文中運動論的設計不采用從動輪的形式,只選取驅動輪。
1.2 運動機構設計
在實際情況下,玻璃表面可能沾滿灰塵和污漬,運動機構既要保證機器人在豎直壁面靈活快速移動同時保證在壁面上安全吸附,這一技術難題是玻璃壁面清洗機器人研究的關鍵技術。運動機構如圖3所示,運動輪采用摩擦系數大的軟橡膠,兩個輪子左右對角分布在機器人底盤兩側,由獨立的減速電機控制。改變減速電機的轉速可以實現機器人的前進、后退和轉向。運動系統中沒有采用被動輪,負壓腔產生的吸附力垂直于壁面由外向內將機器人“推壓”在玻璃壁面。一般來講,吸附力與以下兩種作用力的合力組成平衡力系:(1)主動輪支持力;(2)清潔抹布支持力。二者在數量關系上有以下關系:
圖3 爬壁機器人運動機構三維圖
Fa=FN1+FN2 (2)
式中,Fa-負壓腔產生的吸附力;FN1-主動輪支持力;FN2-清潔抹布支持力。
為使機器人安全吸附在玻璃壁面上,需要用摩檫力去平衡機器人的重力。對角設置兩個驅動輪有以下三方面的作用:(1)只有驅動輪而未設置從動輪可以提高負壓腔吸附力的利用率;(2)增加了清
潔抹布與玻璃壁面的接觸應力,有利于玻璃壁面上較臟污漬的擦拭;(3)減小了機器人的轉向半徑,增強了機器人的靈活性。
1.3 密封及清潔抹布設計
密封及清潔抹布如圖4所示,安裝在機器人底部,摩擦力適中、密封性能良好的密封系統,同時可以起到負壓腔體的密封和玻璃壁面的擦拭兩個作用。
一般說來,玻璃壁面較為光滑平坦,對于密封機構的氣密性有較高要求,適合采用有正壓力的密封機構。盡管正壓力的存在,會抵消一部分吸附力降低吸附利用率,但是對于玻璃壁面清洗擦拭的場合,使用帶有正壓力的密封機構可以大大改善玻璃壁面的清洗效果同時降低空氣泄漏量,從而減小吸附功耗。
圖4 密封及清潔抹布設計
2 低噪聲負壓吸附系統的研究
應用于室內或室外環境的清洗機器人運動在具有一定高度的玻璃壁面上,離心風扇的氣動噪聲是清洗機器人噪聲的主要來源。研究負壓吸附系統中的關鍵部位——離心風扇,設計并選取適合低噪聲負壓吸附系統的離心風扇結構,同時對其各項結構參數進行優化設計,使負壓吸附系統能夠實現最大化的吸附力利用,從而在安全吸附的條件下降低風扇轉數降低噪聲的目的。
2.1 玻璃壁面清洗機器人吸附及噪聲產生機理分析
圖5負壓吸附系統工作原理,根據伯努利原理:物體表面流體流速越大,則物體表面所受壓力越小。離心風扇在電動機的帶動下高速旋轉,負壓腔內的空氣在高速旋轉的同時經由負壓腔裙邊排出,這樣就會在負壓腔內形成一個瞬時真空。在豎直的玻璃壁面上,機器人本體內部表層因出現瞬時真空而受到的大氣壓力會降低,但是在機器人本體表面所受到的大氣壓力維持不變,綜上分析,外部大氣壓會將機器人本體推壓在玻璃壁面上。
圖5 負壓吸附系統工作原理
根據對機器人結構組成可以分析出,機器人本體的噪聲主要來源于負壓發生裝置。負壓發生裝置包括離心風扇和無刷電機,徑流式離心風扇相對于軸流式離心風扇能夠為機器人提供更多的負壓差;吸盤由裙邊、吸盤腔體、進氣分隔欄和密封及清潔抹布組成,裙邊有利于氣體的加壓和排出,密封及清潔抹布可以防止吸盤腔體內的空氣泄漏同時用作玻璃壁面的擦拭。
清洗機器人吸附在玻璃壁面上,吸附系統中的離心風扇的高速旋轉會產生噪聲。該噪聲可分為兩類:一類是氣動噪聲且占比最大,另一類是機械噪聲影響較小。氣動噪聲產生的原因是離心風扇切割空氣帶動空氣旋轉而造成的,氣動噪聲也可以根據產生機理分為兩類:一類是旋轉噪聲,另一類是渦流噪聲。所謂旋轉噪聲是因為負壓腔內離心風扇在切割空氣時產生的相對運動而引起的壓力脈動造成的。查找資料可以得到旋轉噪聲的諧波頻率:
fi=■i (3)
式中,fi-葉輪轉速(rpm);z-葉片數;i-諧波次數,1,2,3…。
渦流噪聲產生原理:負壓腔中間部分是旋轉的氣流,氣流逐漸向四周擴散到達負壓腔內部的壁面附近時,運動的氣流因為其固有的粘滯摩擦性與靜止的壁面碰撞,產生一個又一個帶有渦流的氣團,這些渦旋不斷生成又破滅,就會產生一種壓強脈動,當這些現象極為劇烈時就會輻射出聲音。該渦流噪聲頻率是:
fi=K■ (4)
式中,K-斯特勞哈爾數;V-氣體與葉片的相對速度;D-氣體入射方向的物體厚度。
2.2 低噪聲離心風扇設計
分析旋轉噪聲和渦流噪聲的頻率公式可以知道,為了實現機器人低噪聲運行目的,需要在保證機器人安全吸附的前提下,盡可能降低離心風扇的轉數。因此,設計一種應用于玻璃壁面吸附的低噪聲離心風扇,可以在不減少吸附力的前提下,降低噪聲污染,對于整個玻璃壁面清洗機器人有重要的意義。圖6離心風扇三維圖。
離心風扇的旋轉速度越高,清洗機器人本體產生的機械噪聲和氣動噪聲就會越大,如何在維持吸附力不變的同時降低風扇轉數就是本課題要解決的重點問題。本文選取離心風扇扇葉數為12個,葉片形式類似于飛機的機翼——葉片前段是圓弧狀的加厚區域,這樣設計有利于風扇揚程的增加。
圖6 離心風扇三維圖
3 結束語
玻璃壁面清洗機器人與一般的智能機器人不同,該種類機器人的工作環境特殊,一般是在距離地面幾米甚至上百米的豎直墻壁外側工作,這就要求機器人在運動的過程中實現安全吸附,盡量避免工作時發生掉落、死機、卡住等危險事故。本文結合運動系統設計、負壓吸附技術,針對低噪聲離心風扇、最佳吸附力的選取等方面進行研究。針對玻璃壁面清洗機器本體吸附系統吸附噪聲大、結構復雜、負壓維持率低等問題,通過變形設計和實驗研究方法,對壁面清洗機器人本體結構進行設計,重點放在研究設計適合玻璃壁面清洗的負壓吸附系統,進一步分析了負壓吸附原理,給出了與吸附系統相配合的最佳移動機構,同時設計了一種適合吸附系統且結構簡單的離心風扇。
參考文獻
[1]彭晉民,李濟澤,邵潔,等.負壓爬壁機器人吸附系統研究[J].中國機械工程,2012(18):2160-2164+2168.
[2]朱志宏,李濟澤,彭晉民,等.微小型壁面檢測爬壁機器人移動平臺研究[J].機械工程學報,2011(03):49-54.
[3]崔旭明,孫英飛,何富君.壁面爬行機器人研究與發展[J].科學技術與工程,2010(11):2672-2677.
[4]張兆君,顏寧,宗光華.壁面吊掛清洗機器人真空吸附力和牽引力設計研究[J].機器人,2005(01):57-62.