基于ANSYS的RV傳動擺線輪時變嚙合剛度研究
2017-04-06 02:55:33何衛(wèi)東張子揚(yáng)吳鑫輝
大連交通大學(xué)學(xué)報 2017年2期
何衛(wèi)東,張子揚(yáng),吳鑫輝
(大連交通大學(xué) 機(jī)械工程學(xué)院,遼寧 大連 116028)*
基于ANSYS的RV傳動擺線輪時變嚙合剛度研究
何衛(wèi)東,張子揚(yáng),吳鑫輝
(大連交通大學(xué) 機(jī)械工程學(xué)院,遼寧 大連 116028)*
以廣泛應(yīng)用于工業(yè)機(jī)器人關(guān)節(jié)的RV減速器做為研究對象,綜合考慮各部件彈性變形和間隙,應(yīng)用ANSYS APDL建立了RV- 80E減速器第二級的可參數(shù)化有限元模型,計算出13個嚙合位置的應(yīng)力和變形,并根據(jù)擺線針輪的嚙合特性,推導(dǎo)出各個嚙合位置的嚙合剛度的等效扭轉(zhuǎn)剛度,從而得到RV傳動中擺線針輪的時變嚙合剛度,為后續(xù)RV傳動系統(tǒng)的力學(xué)研究提供理論基礎(chǔ).
RV減速器;時變嚙合剛度;ANSYS;工業(yè)機(jī)器人;擺線針輪
0 引言
RV(Rotate Vector)減速器是一種二級閉式行星傳動機(jī)構(gòu).RV傳動具有傳動比范圍大、傳動效率高、承載能力強(qiáng)、傳動平穩(wěn)、傳動精度高等優(yōu)點.因此,RV傳動現(xiàn)已廣泛應(yīng)用于工業(yè)機(jī)器人、紡織機(jī)械等領(lǐng)域.嚙合剛度是RV減速器的意向重要的性能指標(biāo),針對該類減速器的力學(xué)性能和剛度特性的研究一直是研究熱點.文獻(xiàn)[1]對RV傳動中的擺線針輪進(jìn)行了理論受力分析;文獻(xiàn)[2]推導(dǎo)出了判定擺線輪與針輪同時嚙合齒數(shù)的基本原則;文獻(xiàn)[3]得出了擺線針輪的綜合嚙合剛度的推導(dǎo)公式;文獻(xiàn)[4]基于等價模型的方法,計算了擺線針輪的嚙合剛度;文獻(xiàn)[5]則對擺線針輪的受力情況做了簡單的有限元分析,并總結(jié)了整合各齒嚙合剛度的方法.
文獻(xiàn)[1- 4]只考慮了擺線針輪齒面的微小變形,并未考慮擺線針輪輪體的結(jié)構(gòu)的大變形;而文獻(xiàn)[5],只假設(shè)了每片擺線針輪有五個輪齒接觸,而在實際中擺線針輪受力時,有更多的齒接觸.本文以廣泛應(yīng)用于工業(yè)機(jī)器人關(guān)節(jié)的RV減速器做為研究對象,應(yīng)用ANSYS APDL建立了RV- 80E減速器第二級的可參數(shù)化有限元模型,計算出13個嚙合位置的應(yīng)力和變形,并根據(jù)擺線針輪的嚙合特性,推導(dǎo)出各個嚙合位置的嚙合剛度的等效扭轉(zhuǎn)剛度,從而得到RV傳動中擺線針輪的時變嚙合剛度,為后續(xù)RV傳動系統(tǒng)的力學(xué)研究提供理論基礎(chǔ).
1 嚙合剛度的計算方法
根據(jù)文獻(xiàn)[2]可知,理想的擺線齒廓與標(biāo)準(zhǔn)針齒嚙合時,有一半針齒同時與擺線輪嚙合.顯然,要使擺線輪齒進(jìn)入嚙合,必須先克服其與對應(yīng)針齒間的初始間隙.擺線輪與針齒同時嚙合齒數(shù)與機(jī)構(gòu)具體的誤差、修形及載荷參數(shù)有關(guān),通常為4~7個[2].

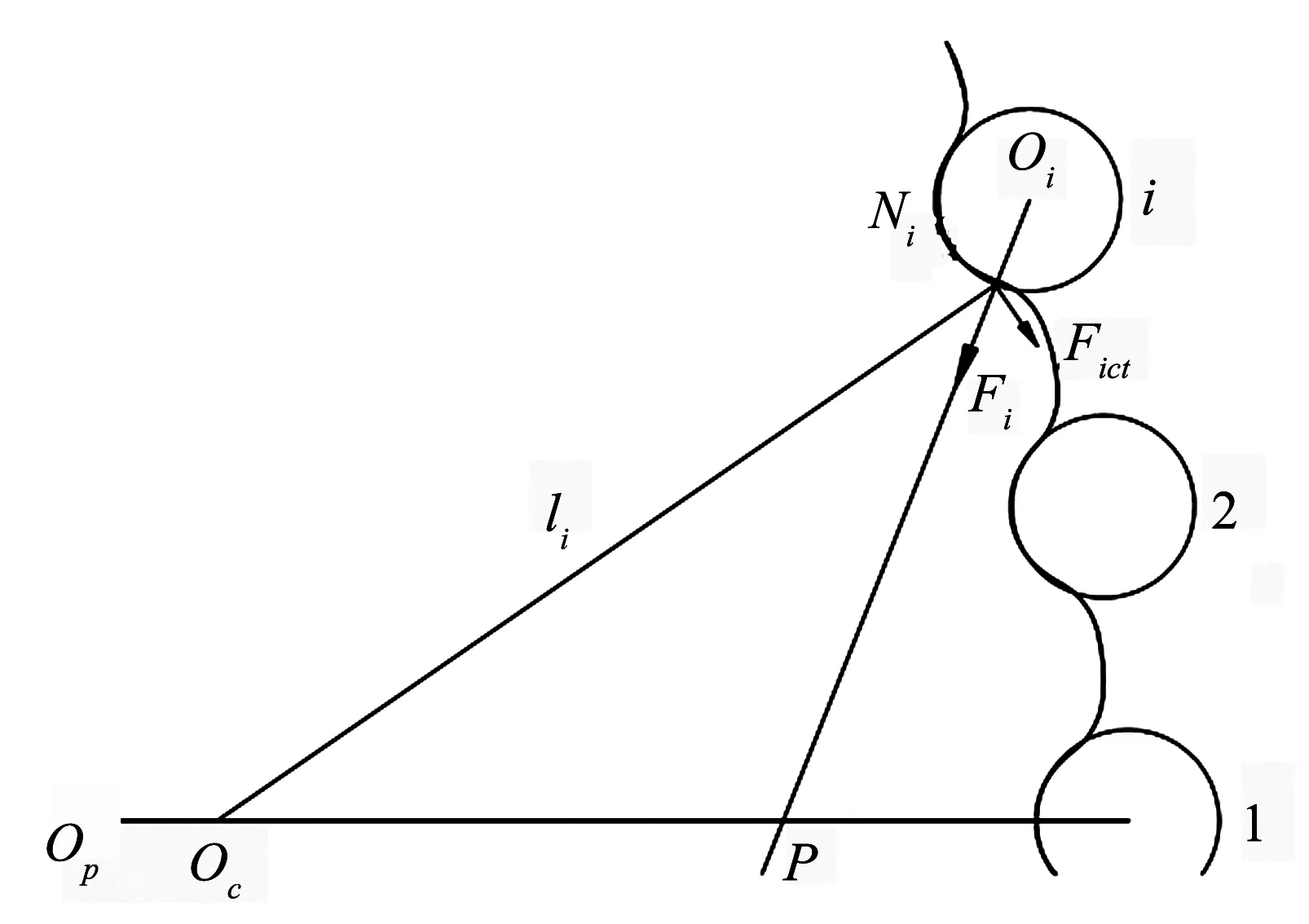
圖1 受力分析
根據(jù)擺線針輪的嚙合特性,第i個齒的受力線經(jīng)過瞬心P和第i個針齒圓心Oi,這使每個輪齒的受力方向都不同,所以將各力轉(zhuǎn)化為對于擺線輪中心Oc的力矩,令|OCNi|=li,可以得到第i個齒所受嚙合力Fi對于擺線輪中心Oc的力矩為:
Mi=liFict
設(shè)擺線輪所有嚙合齒中最大轉(zhuǎn)角位移為α,這樣可以推到出擺線輪的嚙合剛度為:

2 有限元模型的建立
以RV- 80E型減速器為研究對象,所有的過程包括建模、劃分網(wǎng)格、前處理和后處理,這是因為[6]RV減速器是一個高精密的傳動裝置,使用ANSYS建模并且分析,可以減小模型由一款軟件導(dǎo)入到另一款軟件時發(fā)生模型缺損的風(fēng)險,以確保計算的精準(zhǔn)度;又由于用ANSYSAPDL語句來編程建模可以方便復(fù)雜模型的修改.表1為RV- 80E型減速器參數(shù)表.

表1 RV-80E減速器擺線針輪傳動基本參數(shù)
根據(jù)減速器的參數(shù),建立RV- 80E型減速器的第二級傳動可參數(shù)化的有限元模型,其中的零件包括擺線輪2片、針齒28個、針齒殼1個、圓柱滾子軸承3對、偏心軸3個.圖2為接觸部位的網(wǎng)格劃分.圖3為擺線輪的模型,可以看到擺線輪梯形孔上方的較為薄弱,我們將此區(qū)域定義為柔性區(qū),而其他部位定義為剛性區(qū).根據(jù)文獻(xiàn)[2]分析出的同時且連續(xù)接觸的齒數(shù)為4~7,而當(dāng)梯形孔上部發(fā)生較大變形時,它所對應(yīng)的齒有可能不接觸,這樣7號之后的齒就會補(bǔ)償上來,所以,模型建立了每個擺線輪所對應(yīng)的嚙合數(shù)為14個齒,共28個齒;同時擺線輪有39個齒,且輪體上的孔都是成120°對稱分布,所以只要計算13個嚙合位置,就可以反應(yīng)整個擺線輪的時變嚙合剛度.圖4為整個減速器第二級傳動的有限元模型.
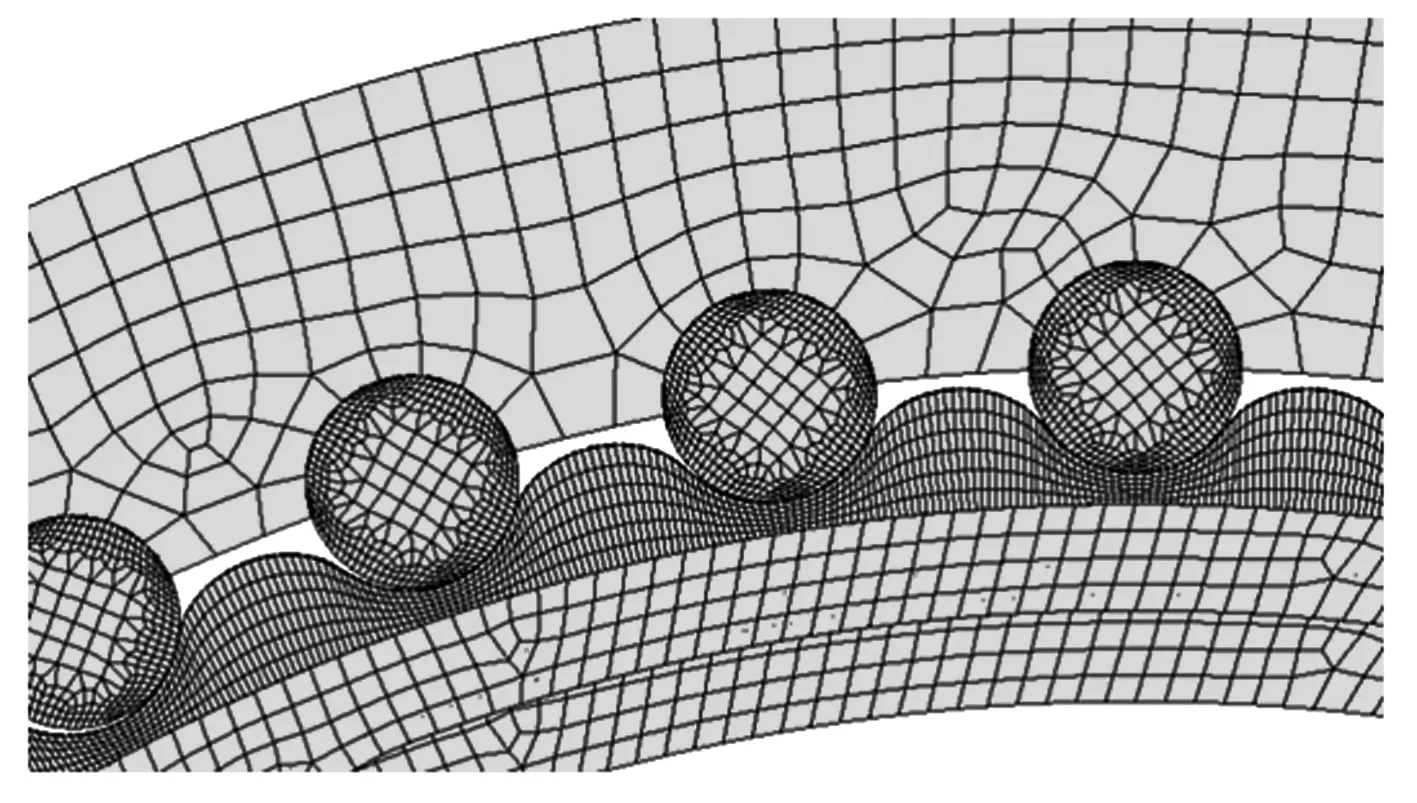
圖2 接觸部位網(wǎng)格劃分
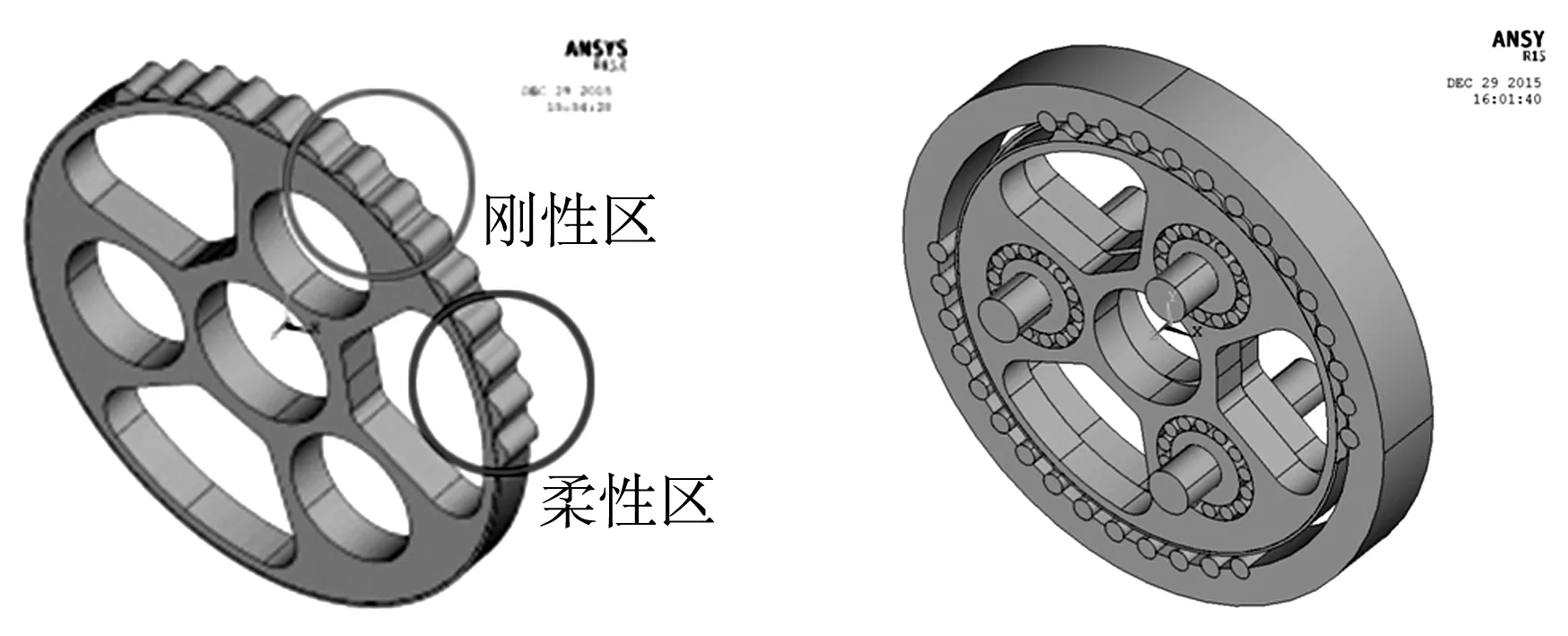
圖3 擺線輪模型 圖4 第二級模型
其中針齒和針齒殼做耦合處理,其余接觸部位定義接觸對,3個偏心軸的兩端分別固定,其他零件都做軸向約束,將滾柱軸承做周向位移,針齒殼上順時針加載,載荷為轉(zhuǎn)速為15 r/min下的額定載荷784 N·m.
3 有限元計算
圖5為第一個嚙合位置計算得到的擺線輪的應(yīng)力云圖,從圖中可以看出,接觸的齒數(shù)為8個,且不連續(xù),這也就印證了建模時的假設(shè):梯形孔上方的薄弱區(qū)由于變形量較大,只有3、4號兩個齒接觸,而大部分接觸齒都分布在剛性比較大的區(qū)域.表2為1~13嚙合位置所計算出的數(shù)據(jù).圖6為時變嚙合剛度曲線圖.
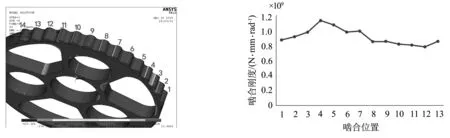
圖5 嚙合位置1擺線輪的應(yīng)力云圖 圖6 時變嚙合剛度曲線圖
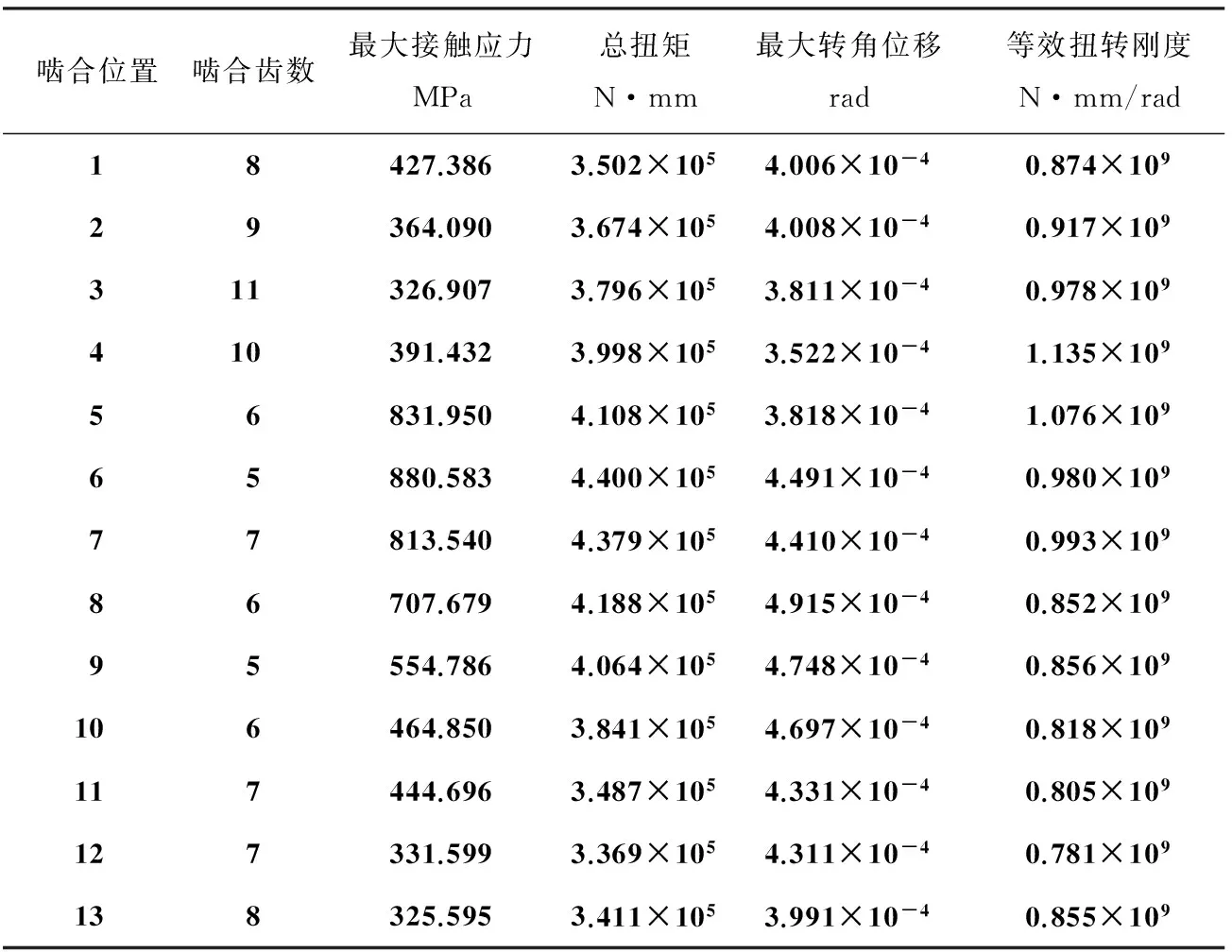
表2 計算數(shù)據(jù)
由表2中數(shù)據(jù)可知接觸應(yīng)力的大小與接觸齒數(shù)有關(guān),接觸齒數(shù)越多,接觸應(yīng)力越小;反之越大.最大接觸應(yīng)力為880.583 Pa.最大嚙合剛度為1.135×109N·mm/rad,位置4,其特點為起始的1號齒在剛性區(qū),且10個嚙合齒中的8個齒均分布在剛性區(qū);最小嚙合剛度為0.781×109N·mm/rad,位置12,其特點為起始的1號齒在柔性區(qū),且7個嚙合齒中僅有2個齒均分布在剛性區(qū).
4 結(jié)論
(1)由于擺線輪的輪體結(jié)構(gòu)分布不均,會產(chǎn)生結(jié)構(gòu)大變形,所以擺線輪在嚙合時,嚙合的齒可能不連續(xù);
(2)嚙合剛度的大小與嚙合位置和嚙合齒的分布有直接的關(guān)系,嚙合起始分布位置在剛性區(qū),且大部分接觸齒都分布在剛性區(qū)的嚙合位置,嚙合剛度比較大;嚙合起始分布位置在柔性區(qū),且少部分嚙合齒分布在剛性區(qū)的嚙合位置,嚙合剛度比較小.
[1]機(jī)械設(shè)計手冊編委會.機(jī)械設(shè)計手冊 [M].北京:機(jī)械工業(yè)出版社, 2004.
[2]李力行.?dāng)[線針輪行星傳動的齒形修正及受力分析[J].中國機(jī)械工程,1986,22(1):40- 49.
[3]張迎輝,肖君君,何衛(wèi)東.機(jī)器人用RV減速器針擺傳動嚙合剛度計算[J].大連交通大學(xué)校報,2010,31(2):20- 23.
[4]何衛(wèi)東,陸巖,吳鑫輝.基于等價模型的RV減速器扭轉(zhuǎn)剛度計算[J].機(jī)械傳動,2013,37(9):38- 41.
[5]楊玉虎,朱臨宇.RV減速器扭轉(zhuǎn)剛度特性分析[J].天津大學(xué)學(xué)報,2015,48(2):111- 118.
[6]博弈創(chuàng)作室.APDL參數(shù)化有限元分析技術(shù)及其應(yīng)用實例[M].北京:中國水利水電出版社,2004.
Study of Time Varying Meshing Stiffness of RV Drive based on ANSYS
HE Weidong,ZHANG Ziyang,WU Xinhui
(School of Mechanical Engineering,Dalian Jiaotong University,Dalian 116028,China)
Taking RV reducer that wildly used in industrial robots joints as the study object, ANSYS APDL is used to establish parameterized finite element model of RV- 80E reducer and calculate stress and deformation of 13 meshing positions considering elastic deformation clearance of different.According to the meshing characteristics of the cycloidal-pin wheel,equivalent torsional stiffness of the meshing stiffness of each meshing position is deduced,and the time varying meshing stiffness of the RV drive is obtained.
RV reducer; time varying meshing stiffness; ANSYS; industrial robot; cycloidal-pin wheel
1673- 9590(2017)02- 0055- 04
2016- 01- 06
何衛(wèi)東(1967-),男,教授,博士,主要從事現(xiàn)代機(jī)械傳動的研究 E-mail:hwd5870@163.com.
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學(xué)學(xué)報(2019年6期)2019-08-13 07:04:32
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24