基于有限元法的弓網過渡段處動態性能仿真分析
2016-10-17 03:41:57李瑞平張衛華西南交通大學牽引動力國家重點實驗室成都610031
振動與沖擊 2016年18期
關鍵詞:模型
楊 藝, 周 寧, 李瑞平, 張衛華(西南交通大學 牽引動力國家重點實驗室,成都 610031)
?
基于有限元法的弓網過渡段處動態性能仿真分析
楊藝, 周寧, 李瑞平, 張衛華(西南交通大學 牽引動力國家重點實驗室,成都610031)
針對城市軌道交通鐵路中采用的接觸網錨段關節、剛柔過渡段及CED125D受電弓結構,基于ANSYS有限元軟件,采用廣州地鐵實際接觸網線路的基本參數,建立包含剛性接觸網、柔性接觸網及剛柔過渡段的接觸網模型以及簡化為彈簧阻尼機構的CED125D受電弓歸算質量模型。通過動力學仿真分析得到反映弓網系統動態性能的接觸壓力與抬升位移等數據,進而對受電弓在通過錨段關節、剛柔過渡段時的動力學行為及規律進行探討與研究。與實測結果比較,所建立的弓網系統有限元模型是正確和有效的。
錨段關節;剛柔過渡段;弓網耦合動力學;接觸壓力;抬升位移
當今社會,隨著電氣化鐵路的發展,以及世界各地對環境問題的日益關注,各地都在大力發展城市軌道交通。由于環境條件的限制,城市軌道交通接觸網經常同時使用剛性接觸網與柔性接觸網,以很多地鐵交通為例,在隧道段使用剛性接觸網,明線段則使用柔性接觸網,存在著錨段關節以及剛柔過渡段等不同的線路條件。因此考慮受電弓在通過這種不同線路條件時的動力學行為,對弓網關系的研究有重要的意義。
基于ANSYS有限元軟件,根據廣州地鐵實際接觸網線路參數建立了包含剛性接觸網、柔性接觸網及剛柔過渡段的接觸網模型,采用CED125D受電弓三質量塊歸算質量模型,通過仿真分析計算了受電弓在通過不同線路條件時弓網接觸點的抬升位移、接觸壓力等動態性能參數,并就受電弓在通過錨段關節、剛柔過渡段時的動力學行為以及規律進行了討論。最后將仿真結果與線路實測結果進行比較,驗證了本文建立的城市軌道交通中弓網系統模型的準確性和有效性。
1 接觸網模型
1.1柔性段和剛性段模型
對于接觸網柔性段,采用有限單元法,將接觸線和承力索等效為梁單元,而吊弦相對前二者來說,線密度較小,簡化為彈簧質量單元,從而建立包括承力索、接觸線和吊弦的柔性接觸網模型[1-4](見圖1(a)),模型的參數見表1;剛性懸掛接觸網由接觸線、匯流排及懸掛機構組成,將懸掛機構考慮為有自重的彈簧,匯流排與接觸線一起考慮為梁單元[5](見圖1(b)),模型的參數見表2。

圖1 接觸網柔性段和剛性段模型Fig.1 Flexible suspension and rigid suspension catenary

表1 接觸網柔性段仿真參數

表2 接觸網剛性段仿真參數
1.2錨段關節模型
兩個相鄰錨段的銜接區段(重疊部分)稱為錨段關節,是為了使受電弓能平滑、安全地由一個錨段過渡到另一個錨段而設計的[6]。采用與剛性接觸網類似的建模方法,將兩個錨段的懸掛機構等效為彈簧-質量系統,用帶質量的彈簧單元combine14和mass21進行網格劃分。接觸線和匯流排一同視為梁結構,選用beam188劃分相應網格。同時,將梁結構的末端抬高70 mm,并在兩個錨段端部形成有部分重疊的平行分布(見圖2)。
1.3剛柔過渡模型
剛柔過渡段是指剛性接觸網與柔性接觸網的銜接過渡處,是實現剛柔無縫連接的關鍵部位,主要分為關節式和貫通式兩種[7-9]。對于貫通式剛柔過渡段,采用剛性逐漸減小的切槽式匯流排與柔性接觸線相銜接來實現剛柔過渡的。首先建立上述的剛性段和柔性段模型,然后通過定義一系列截面積逐步減小的梁單元(beam188),以模擬切槽式匯流排,并實現剛性接觸網到柔性接觸網剛度的自然過渡,從而建立貫通式剛柔過渡模型(見圖3)。
關節式剛柔過渡,采用柔性接觸線和剛性匯流排平行架設形成錨段關節來實現剛柔過渡。即柔性懸掛與剛性懸掛平行交叉一段,形成類似關節的形式。在剛柔過渡的切入點處,剛性接觸網與柔性接觸網分開,剛性接觸網導高高于柔性接觸網導高20~50 mm(導高差),具體值根據受電弓經過剛柔段弓頭抬升的變化決定(見圖4)。
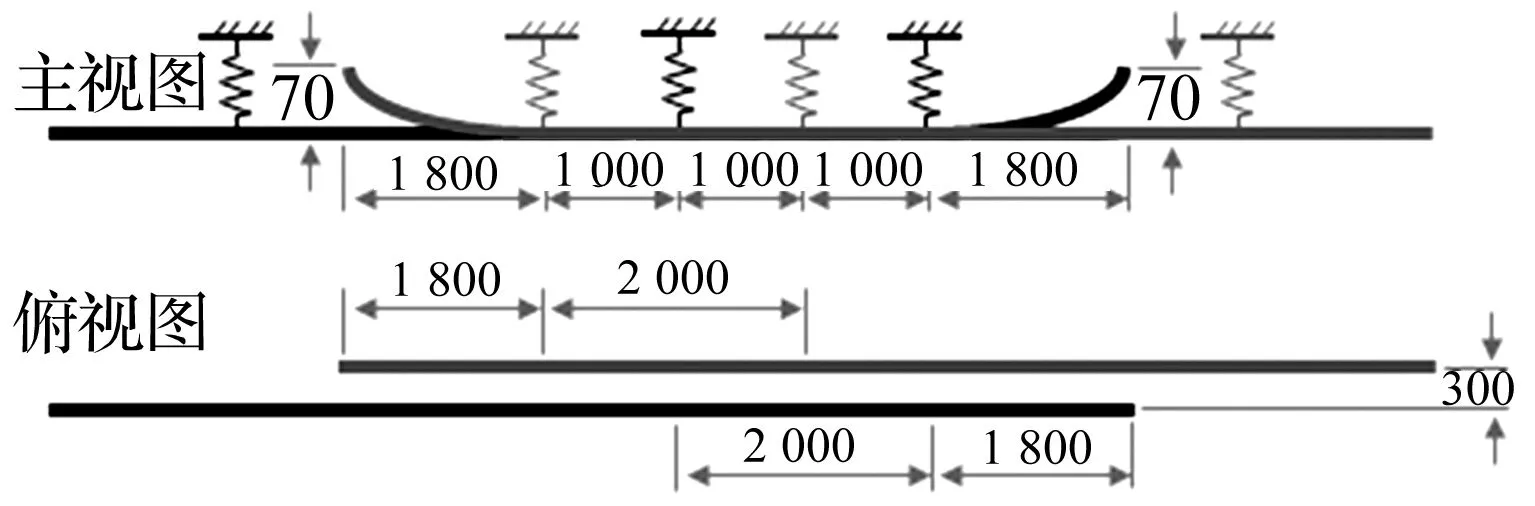
圖2 剛性接觸網錨段關節模型(mm)Fig.2 Model of overlap span(mm)
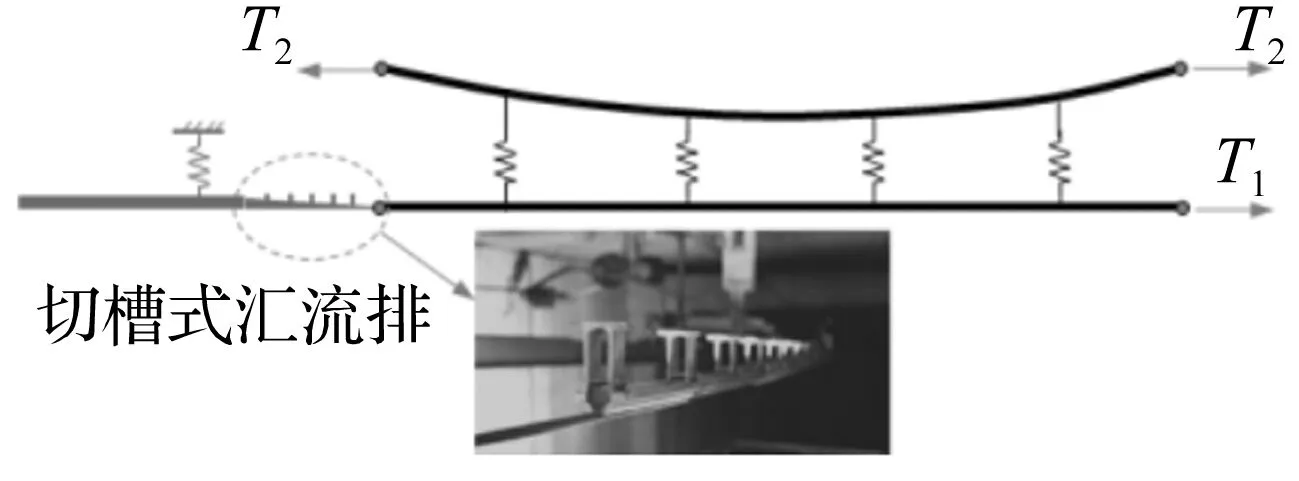
圖3 貫通式剛柔過渡段模型Fig.3 Run-through transition section
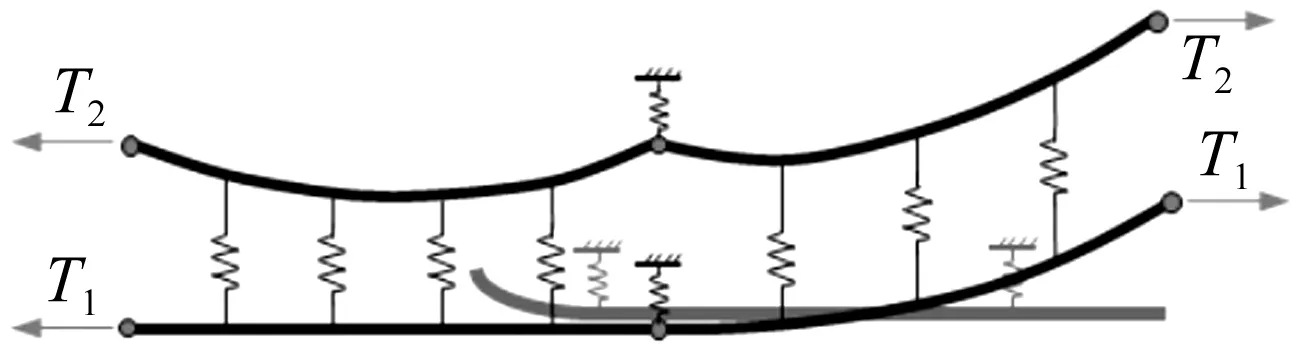
圖4 關節式剛柔過渡段模型Fig.4 Joint transition section
2 受電弓模型
在本文的研究中,只考慮弓網之間的垂向運動,因此將CED125D型受電弓簡化為三質量塊歸算模型[10](見圖5),歸算參數見表3。
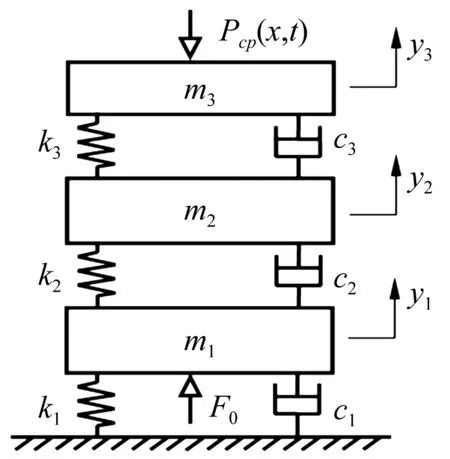
圖5 受電弓歸算質量模型Fig.5 Model of pantograph
由圖5可知,從上到下依次是:m3,c3,k3分別為弓頭部分的等效質量、等效阻尼、等效剛度;m2,c2,k2分別為上框架部分的等效質量、等效阻尼、等效剛度;m1,c1,k1分別為下臂桿部分的等效質量、等效阻尼、等效剛度;Pcp(x,t)為接觸網與受電弓之間的動態接觸壓力;F0為受電弓受到的靜態抬升力。
表3 受電弓結構參數
3 動力學計算結果
3.1在錨段關節處的弓網動態行為
考慮受電弓分別以60 km/h 、80 km/h、100 km/h這三種速度工況沿接觸網運動,設采樣頻率為1 000 Hz,由此得到受電弓通過時接觸網的抬升位移和弓網之間的接觸壓力(見圖6)。

圖6 錨段關節弓網接觸力及弓頭位移結果Fig.6 Simulation results in overlapping section
由圖6可知,當受電弓通過錨段關節時,弓網之間的接觸壓力產生明顯的波動,隨著速度的增加,錨段關節處弓網間的最小接觸力從60 km/h的32.63 N減小到100 km/h的0 N;最大接觸力從60 km/h的158.18 N增大到100 km/h的193.91 N,而且弓網間的接觸壓力的震蕩也逐漸增大。當速度達到100 km/h時,錨段關節處的接觸力震蕩劇烈,發生了離線現象。同時可見,剛性接觸網在受電弓通過時的動態抬升量非常小,基本在1~5 mm之間波動,在錨段關節處由于接觸網重疊處剛度的增加,弓頭的振動位移有減小的趨勢。
3.2貫通式剛柔過渡段處的弓網動態行為
對于貫通式剛柔過渡段,考慮受電弓從柔性段進入到剛性段和從剛性段進入到柔性段兩種通過情況,在速度80 km/h、120 km/h、140 km/h條件下進行弓網系統動力學計算,時間積分步長為0.002 s,由此得到受電弓通過時接觸網的抬升位移和弓網之間的接觸壓力,其結果見圖7。
由圖7可知:當受電弓經過剛柔過渡段時,由于接觸網剛度存在較大的差異,從而導致弓網接觸力在過渡段產生明顯的波動。在同一速度等級下,受電弓從柔性段進入剛性段時,接觸力的波動幅度明顯要比從剛性段進入柔性段時大;對比不同速度等級受電弓從柔性段進入剛性段的接觸壓力發現,隨著速度的增加,接觸壓力的波動逐漸增大。當速度為80 km/h時,過渡段的接觸壓力在49.98~188.12 N之間,未出現離線;當速度增加到140 km/h時,過渡段的接觸壓力在0~259.70 N之間震蕩,產生離線現象。但在此速度下,受電弓從剛性接觸網段過渡至柔性段未出現離線,仍能實現良好的過渡。
另一方面,從弓頭振動位移來看,由于剛性區段接觸網的靜態剛度遠大于柔性區段,所以在剛性段以及剛柔過渡段受電弓的弓頭位移明顯小于柔性段的弓頭振動位移。
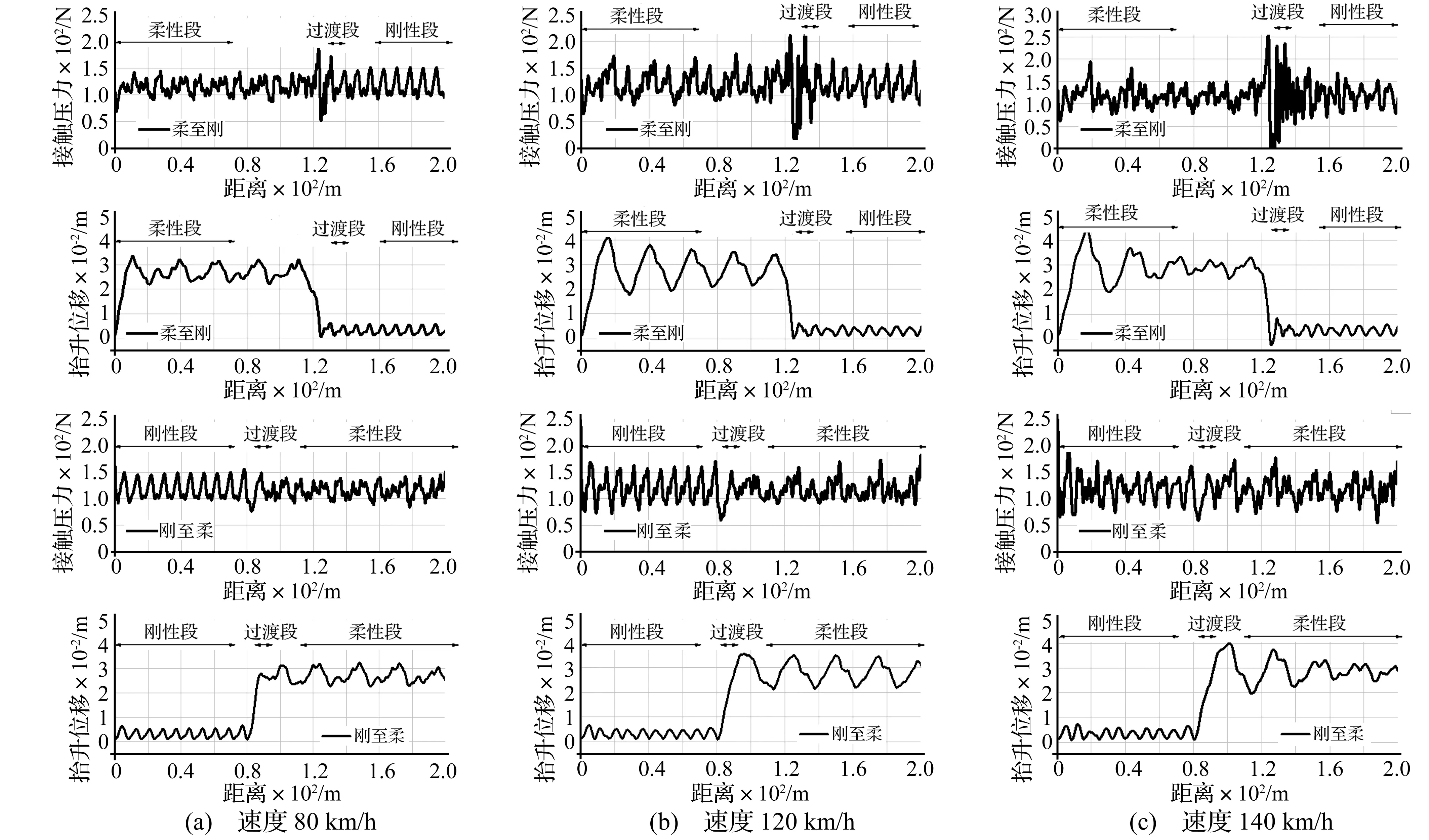
圖7 貫通式剛柔過渡弓網接觸力及弓頭位移結果Fig.7 Simulation results in Run-through transition section
3.3關節式剛柔過渡段處的弓網動態行為
對于關節式剛柔過渡段模型,為研究不同導高差對過渡段處接觸力的影響,以下分別對30 mm、40 mm及50 mm這三種導高差工況進行計算。首先考慮受電弓從柔性段進入到剛性段情況,在速度等級80 km/h條件下,其仿真結果見圖8。
從圖8可知,導高差為30 mm時,在過渡段附近弓網接觸力在0~275 N之間,波動很大,產生了弓網離線;導高差為40 mm時,弓網接觸力在18~156 N之間,波動減小,離線現象消失;導高差為50 mm時,弓網接觸力在35~147 N之間,相對于導高差為40 mm時的接觸力其波動更小。從抬升位移數據來看,導高差為30 mm時,過渡段附近處接觸網的抬升位移出現了一個較陡的峰值,隨著導高差的增加,該峰值逐漸平緩,使得受電弓可以平穩過渡。因此,從仿真結果中可以看到適當的增加導高差有利于受電弓從柔性段順利過渡到剛性段。
在導高差30 mm時,受電弓從柔性接觸網過渡到剛性接觸網有明顯的離線。在這種不利條件下,探究受電弓從剛性接觸網過渡到柔性接觸網時的情況。使用同樣的仿真參數,考慮受電弓從剛性段進入柔性段,在速度等級80 km/h、120 km/h以及160 km/h條件下進行動力學計算(見圖9)。
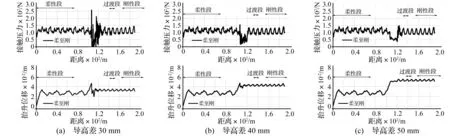
圖8 速度80 km/h時關節式剛柔過渡弓網接觸力及弓頭位移結果Fig.8 Simulation results in joint transition under different height difference, at 80 km/h
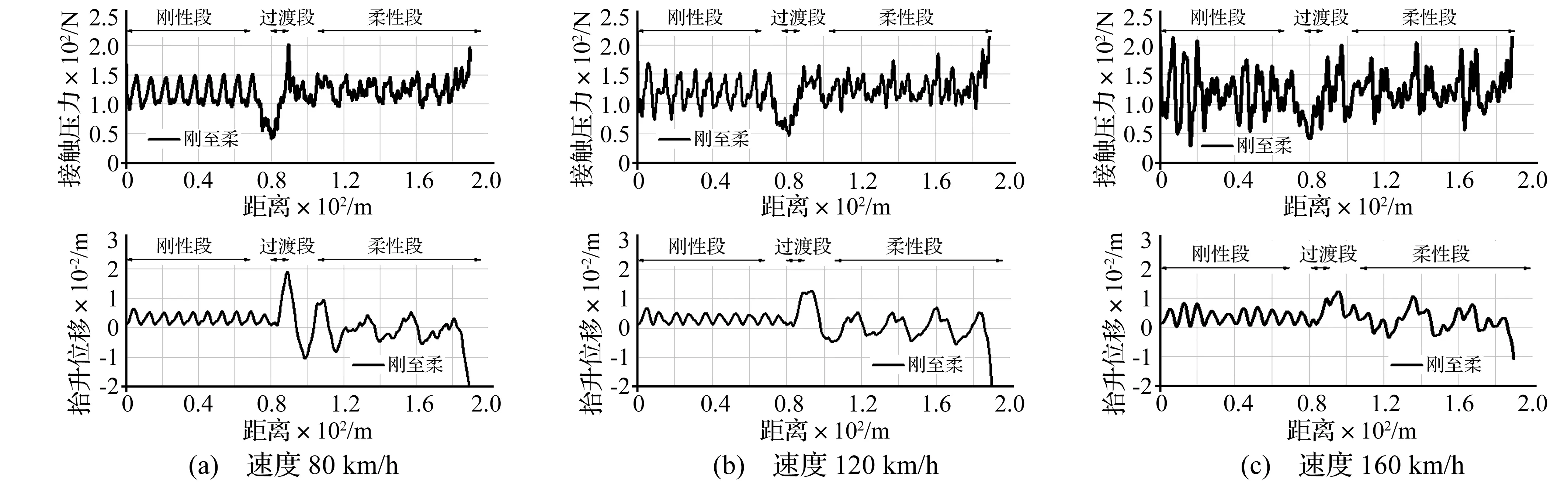
圖9 導高差30 mm時關節式剛柔過渡弓網接觸力及弓頭位移結果Fig.9 Simulation results in joint transition section with the height difference of 30 mm
從圖8和圖9可知,導高差為30 mm時,雖然受電弓從柔性段進入到剛性段時弓網發生了明顯的離線現象,但從剛性段進入到柔性段時,過渡段的接觸壓力在40~205 N之間,弓網沒有發生離線,過渡比較順利。同樣,弓頭位移在受電弓通過過渡段時,由于接觸網整體剛度的差異,產生一個較大的峰值,并且隨著速度的增加,峰值呈減小趨勢。
4 線路實驗驗證
為了驗證本文對剛性懸掛接觸網仿真方法的準確性,將受電弓以80 km/h速度運行工況下仿真分析得到的接觸壓力的統計值與廣州地鐵線路實測的接觸壓力統計值進行了對比分析(見表4)。
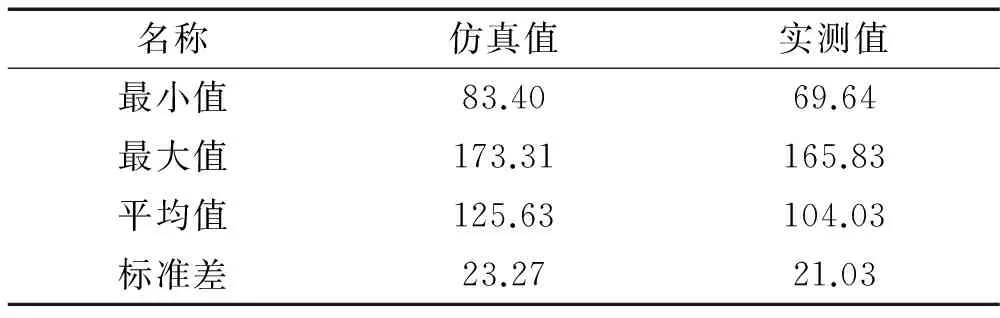
表4 80 km/h工況下接觸壓力統計值比較
由表4可知:本仿真過程中,CED125D受電弓以80 km/h的速度運行時,弓網系統的平均接觸力為125.63 N,在83.40~173.31 N之間波動。為便于實測結果進行比較,根據EN50318標準[11],將實測數據頻率的取值范圍設置為0~20 Hz。通過與實測數據進行比較,可知本文所得的平均接觸力等參數與實測結果較吻合,雖然存在一定的差異,但總體結果是令人滿意的。
5 結 論
針對包含錨段關節、剛柔過渡段的接觸網和CED125D受電弓結構,基于有限元法建立了接觸網和受電弓的彈簧阻尼結構模型,計算了影響弓網系統動態性能的接觸力、抬升位移等指標。從而得出以下結論:
(1) 錨段關節處弓網之間的接觸壓力會發生明顯的變化,接觸力的波動隨速度的增加而變大,當速度升高至100 km/h時,弓網之間出現離線現象。
(2) 對于貫通式剛柔過渡,弓網接觸壓力的波動幅值隨著速度的增加而增加。在同一速度等級下,受電弓從剛性段進入到柔性段時的弓網動態特性要比從柔性段進入到剛性段好。在速度140 km/h時受電弓從柔性段過渡至剛性段時出現了離線現象。但在此速度下,受電弓從剛性段過渡至柔性段未出現離線,仍能實現良好的過渡。
(3) 對于關節式剛柔過渡,適當的增加導高差有利于受電弓從柔性段順利過渡到剛性段,減少弓網離線。
[1] 周寧,張衛華. 基于直接積分法的弓網耦合系統動態性能仿真[J]. 中國鐵道科學,2008,29(6):71-76.
ZHOU Ning,ZHANG Weihua.Dynamical performance simulation of the pantograph-catenary coupled system based on direct integration method[J]. China Railway Science,2008, 29(6):71-76.
[2] 李瑞平,周寧,梅桂明,等.初始平衡狀態的接觸網有限元模型[J].西南交通大學學報,2009,44(5):732-737.
LI Ruiping,ZHOU Ning,MEI Guiming,et al. Finite element model for catenary in initial equilibrium state[J]. Journal of Southwest Jiaotong University,2009,44(5):732-737.
[3] 張衛華, 沈志云. 接觸網動態研究[J]. 鐵道學報, 1991, 13(4): 26-33.
ZHANG Weihua,SHEN Zhiyun. Dynamic studies on catenary[J]. Journal of the China Railway Society, 1991, 13(4): 26-33.
[4] 李瑞平,周 寧,呂青松,等.橫風環境中弓網動力學性能分析[J].振動與沖擊,2014,33(24):39-44.
LI Ruiping, ZHOU Ning, Lü Qingsong, et al. Pantograph-catenary dynamic behavior under cross wind[J]. Journal of Vibration and Shock,2014,33(24):39-44.
[5] 梅桂明,張衛華. 剛性懸掛接觸網動力學研究[J]. 鐵道學報,2003, 25(2): 24-29.
MEI Guiming,ZHANG Weihua. Study on dynamics of rigid suspension catenary[J]. Journal of the China Railway Society,2003, 25(2): 24-29.
[6] KIESSLING F, PUSCHMANN R, SCHMIEDER A,et al. Contact lines for electric railways: planning, design, implementation, maintenance[M]. Paris: Publicis Corporate Publishing, 2009.
[7] WU T X, BRENNAN M J. Dynamic stiffness of a railway overhead wire system and its effect on pantograph catenary system dynamics[J]. Journal of Sound and Vibration, 1999, 219(3): 483-502.
[9] SHIMIZU M, KOBAYASHII T, OYA A. Development of transition structures between overhead rigid conductor line and catenary-type contact line[J]. Quarterly Report of RTRI, 2008, 49(2): 103-107.
[10] 周寧,張衛華,王冬. 受電弓等效模型參數識別及動態性能測試[J]. 西南交通大學學報,2011,46(3):398-403.
ZHOU Ning, ZHANG Weihua, WANG Dong. Lumped mass model for dynamic performance simulation of pantograph[J]. Journal of Southwest Jiaotong University,2011,46(3):398-403.
[11] Railway applications—current collection systems—validation of simulation of the dynamic interactionbetween pantograph and overhead contact line:EN 50318[S].Brussels:CENELEC,2002.
Dynamic performance analysis of different sections of overhead catenary based on finite element model
YANG Yi, ZHOU Ning, LI Ruiping, ZHANG Weihua
(Traction Power State Key Laboratory,Southwest Jiaotong University,Chengdu 610031,China)
For the overlapping section and transition section in the overhead catenary of urban rail transit (URT) as well as the CED125D pantograph, based on the ANSYS simulation platform and according to the practical parameters of catenary network of Guangzhou subway, an appropriate finite catenary model was established, which consists of the rigid suspension catenary, the flexible suspension catenary and the transition sections coupling with a three lumped mass model of the CED125D pantograph. By the dynamical simulations, the contact force and pantograph head displacement that reflect the dynamic performance of the pantograph-catenary system were obtained. Then the dynamic behaviors and the regular pattern of the pantograph-catenary system under the conditions that the pantograph goes through the different sections of catenary were analyzed. Comparing the simulation results provided with the field measured results, the correctness and the effectiveness of the model were proved.
overlapping section; transition section; pantograph-catenary coupling dynamics; contact force; lifted displacement
國家自然科學基金項目(5147539);國家973計劃項目(2011CB711105)
2015-06-07修改稿收到日期:2015-08-31
楊藝 女,碩士生,1991年生
張衛華 男,博士,教授,博士生導師,1961年生
U225.2
A DOI:10.13465/j.cnki.jvs.2016.14.012
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19