一種旋轉角加速度傳感器標定方法的研究*
2016-10-13 05:39:46趙浩,馮浩
傳感技術學報 2016年4期
趙 浩,馮 浩
(1.嘉興學院南湖學院,浙江嘉興314001;2.杭州電子科技大學自動化學院,杭州310018)
一種旋轉角加速度傳感器標定方法的研究*
趙浩1*,馮浩2
(1.嘉興學院南湖學院,浙江嘉興314001;2.杭州電子科技大學自動化學院,杭州310018)
針對旋轉角加速度傳感器標定困難這一問題,提出了一種能夠校準旋轉角加速度傳感器的方法。角加速度激勵源采用伺服電動機產生,被校準的傳感器與激勵源同軸連接,通過調節激勵源的電參數,能夠產生幅值可調的旋轉角加速度量值,測取角加速度傳感器的輸出電壓值后即可實現標定。本文詳細闡述了激勵源的角加速度產生機理,推導了角加速度量值的理論公式,給出了計算角加速度量值所需參數的測取方法,最后對感應式角加速度傳感器進行了校準實驗,驗證了標定方法的可行性。
角加速度;旋轉磁場;橢圓度;有效匝數比
EEACC:7230;7320Edoi:10.3969/j.issn.1004-1699.2016.04.006
旋轉角加速度是一個非常重要的動態角參量,通過對角加速度的測量,就可以分析旋轉系統轉軸對各種激勵的響應情況[1]。目前,旋轉角加速度測量在汽車、軍事、航空航天、工業、電子等多個領域得到了廣泛的應用[2-5]。
由于旋轉角加速度的測量精度很大程度上依賴于標定的準確度,因此旋轉角加速度的校準技術也開始受到重視,國內外很多學者在這一方面進行了大量的研究。例如,薛景峰采用精密角度編碼器和衍射光柵激光干涉儀,研制出頻率范圍為0.25 Hz~550 Hz、角加速度范圍為0.1 rad/s2~1 760 rad/s2的角振動絕對法校準裝置[6];魏敏根據質量—轉動慣量等效原理,提出了一種多維角加速度傳感器的靜態標定方法[7];劉曉敏設計了一種基于伺服電機和單片機系統的角加速度標定裝置[8];高揚根據線加速度和角加速度的關系,對角加速度值進行了測定[9];楊雪松采用正弦激勵法對回轉角加速度進行了測量[10];德國聯邦物理技術研究院在國際上率先建立了角振動國家標準裝置[11],美國、日本、韓國等許多國家的計量機構正在開展動態角運動校準技術研究[12];此外還有通過對角位移或者角度進行微分處理后來校準角加速度的間接標定方法,但測量誤差較大,不適于作為動態角運動量計量標準的溯源途徑[12]。
本文提出了一種能夠校準旋轉角加速度傳感器的方法,闡述了角加速度激勵源的工作機理,推導了角加速度量值的理論公式,最后采用該方法對感應式角加速度傳感器進行了標定實驗,得到了傳感器的性能指標。該方法能夠對角加速度量值進行直接溯源,且激勵源產生的角加速度量值具有較高的信噪比,能夠保證標定結果具有較高的準確度。
1 角加速度激勵源工作原理
角加速度激勵源一般分為電磁式和電機式,本文采用的角加速度激勵源為單相感應電動機,其定子繞組為主、副兩相繞組,在空間上互相正交,且副繞組一般為串接電容后與主繞組并聯。當主、副繞組通入交流電后,兩相繞組分別產生脈振磁場,對兩個脈振磁場在直軸和交軸這兩個正交的方向進行分解,合成后分別為Φ1(t)和Φ2(t),一個周期的波形如圖1所示,其數學表達式為:
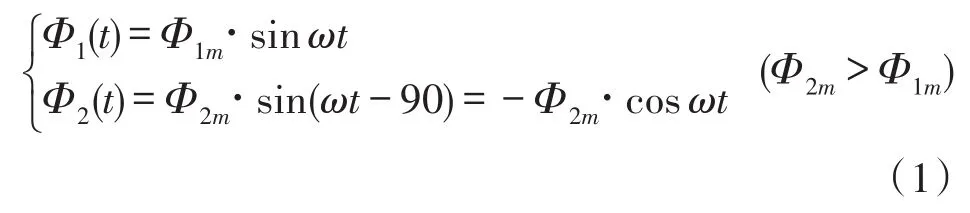
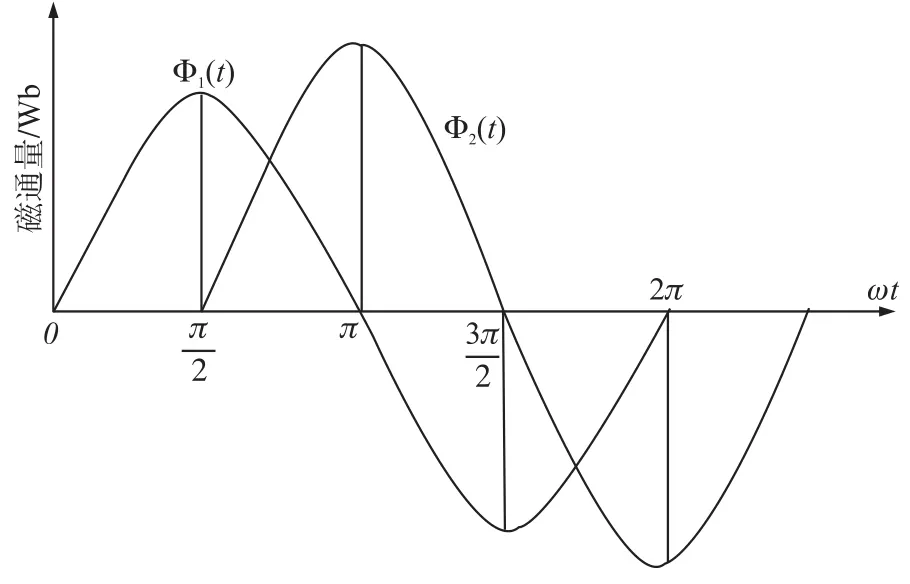
圖1 一個周期的脈振磁場波形圖
根據磁場合成法則,幅值不同的兩個脈振磁場,合成后為如圖2所示的橢圓旋轉磁場,其中φ(t)為t時刻旋轉磁場轉過的角位移。
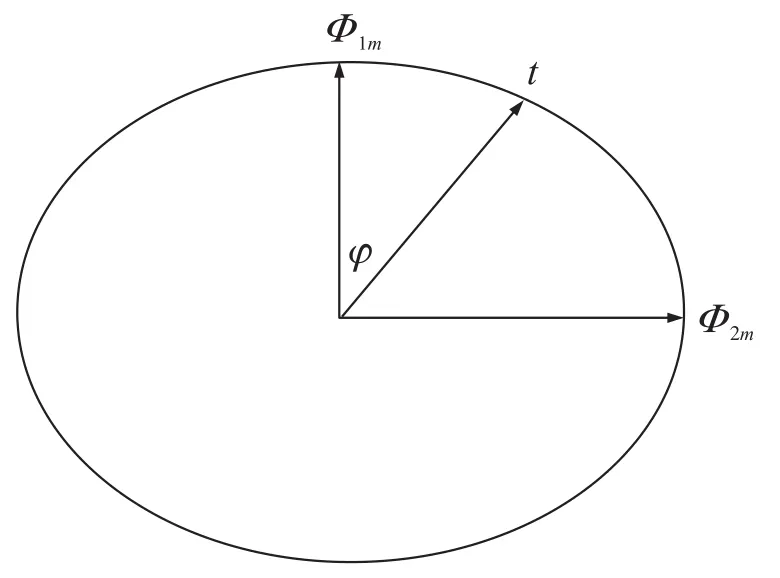
圖2 橢圓旋轉磁場示意圖
由圖1和圖2可知,當ωt從0增至90°時,磁場Φ1(t)幅值由0增至Φ1m,磁場Φ2(t)幅值一直為0;當ωt從90°增加時,開始形成旋轉磁場,轉向為順時針方向,當 ωt從 90°到 180°變化時,0<φ(t)<90,且有:

對一個周期內其余時間段磁場轉過的角度φ(t)做類似推導,得到的結果均為式(2)所示。然后對式(2)進行二階求導,即可得到任意t時刻橢圓旋轉磁場的角加速度為:
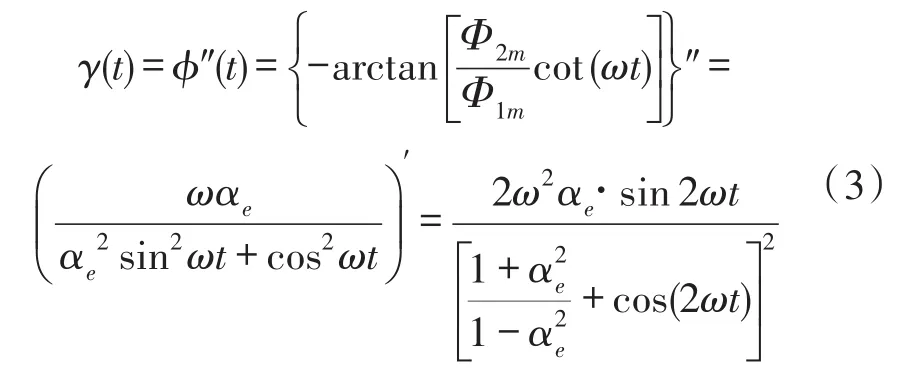
式中αe=Φ1m/Φ2m≤1,定義為旋轉磁場的橢圓度。
單相感應電動機理想空載運行時,轉子電流為零,轉子與旋轉磁場同步轉動,即轉子的角加速度與橢圓旋轉磁場的角加速度相同。假設交流電壓的頻率為50 Hz,則根據式(1)和式(3)可知,旋轉磁場的角加速度變化頻率為繞組通電頻率的2倍,即為100 Hz,采用數值計算軟件對αe=0.8時旋轉磁場的角加速度進行仿真,結果如圖3所示。
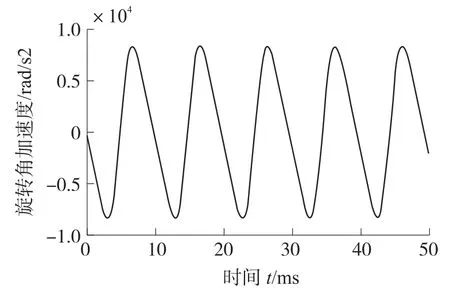
圖3 旋轉磁場角加速度波形圖
由此可知,如果能夠測取旋轉磁場的橢圓度信息αe,就可以根據式(3)得到相應的轉子旋轉角加速度量值。
2 橢圓度αe的測量
橢圓度的獲取需要得到直軸和交軸兩個正交方向脈振磁場的幅值。忽略主、副繞組的漏阻抗,根據變壓器公式,主繞組電壓與產生的磁通量和副繞組電壓與產生的磁通量,滿足方程:
式中f為通電頻率,N1和N2分別為主、副繞組的有效匝數。由于電動機工作時為副繞組串接電容后與主繞組并聯,由此可知:

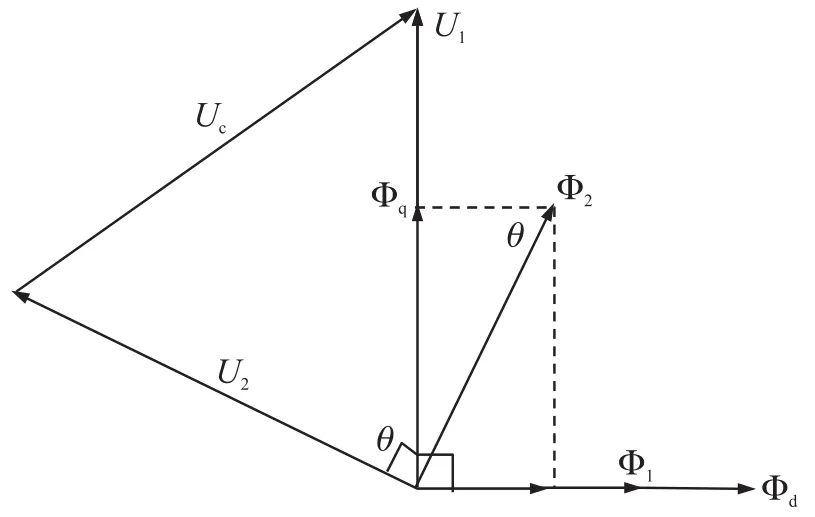
圖4 電壓-磁通關系相量圖
將圖中副繞組產生的磁通量進行分解,分量一與主繞組產生的磁通量方向一致,分量二與主繞組產生的磁通量方向垂直,由此可得:
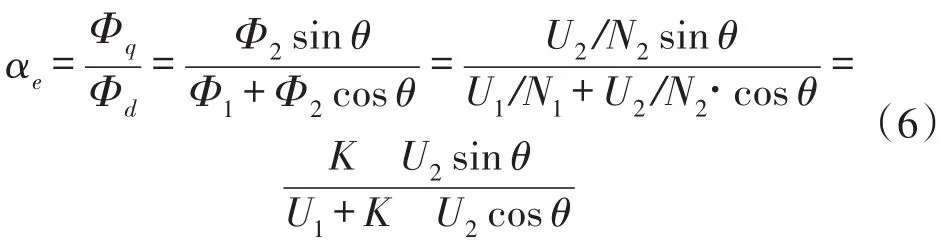
式中K=N1/N2,為主、副繞組的有效匝數比。
3 主副繞組有效匝數比的測定
為了獲取旋轉磁場的橢圓度信息,需要測取主、副繞組的有效匝數比,測定方法如圖5所示。首先對主繞組施加額定電壓U1N,如圖5(a)所示,產生的磁通量為Φ1,忽略主繞組的漏阻抗,則存在:

設轉子的結構參數為常數Ce,電動機空載運行,轉速為n1,則轉子導條切割磁通量Φ1產生的動生電動勢為:

電動勢的方向可以根據右手定則判斷,如圖5(a)所示。設轉子導條的等效電阻為R,則轉子導條電流為:

假設電機磁路不飽和,磁化系數為K,則轉子導條電流產生的磁通量為:

副繞組開路,則副繞組中的感應電動勢為:

聯立式(7)~式(11),可得:

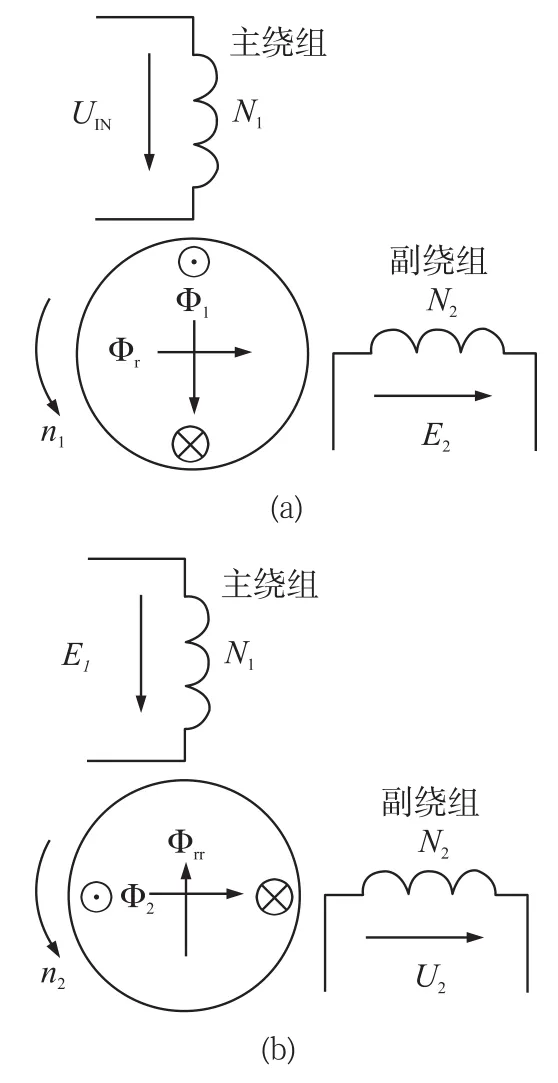
圖5 測定主、副繞組有效匝數比原理圖
然后對副繞組施加電壓U2,如圖5(b)所示,產生的磁通量為Φ2,忽略副繞組的漏阻抗,則存在:

電機同樣空載運行,設此時轉子轉速為n2,則轉子導條切割磁通量Φ2產生的動生電動勢為:

感應電動勢的方向用右手定則判斷,如圖5(b)所示。此時轉子導條中的電流為:

假設電機磁路不飽和,則轉子導條電流產生的磁通量為:

主繞組開路,則主繞組中的感應電動勢為:

聯立式(13)~式(17),可得:

式(12)與式(18)相乘可得:

根據式(19)可以得到主、副繞組的有效匝數比。
4 角加速度傳感器標定實驗與分析
實驗裝置采用浙江大學求是科技的NMCL-II型電機及傳動試驗臺,角加速度激勵源的轉軸通過剛性聯軸器與角加速度傳感器[1]同軸連接,此外還包括傳感器電源和數字存儲示波器,如圖6所示。
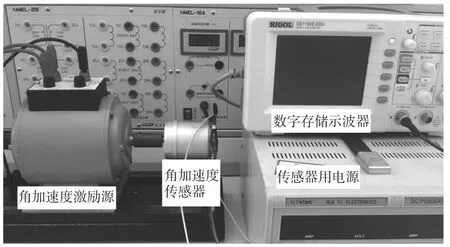
圖6 角加速度傳感器標定實驗裝置
4.1主、副繞組有效匝數比的測定
根據文中闡述的主副繞組有效匝數比測定方法,首先主繞組施加電壓U1N=220 V,副繞組開路,電動機空載,測得副繞組的感應電動勢為E2=243.6 V,轉速n1=1 481 r/min;然后主繞組開路,副繞組施加電壓U2=310 V,電動機空載運行,測得主繞組的感應電動勢E1=118.1 V,轉速n2=1 477 r/min。將數據代入式(19)可得主副繞組的有效匝數比為K=N1/N2=0.587 4。
4.2傳感器標定實驗與分析
角加速度激勵源施加電壓后開始運行,角加速度傳感器輸出的電壓波形如圖7所示,波形的大致趨勢與圖3一致。由此可知激勵源產生的角加速度量值,以及傳感器輸出信號都具有較高的信噪比,能夠保證標定結果的準確度。
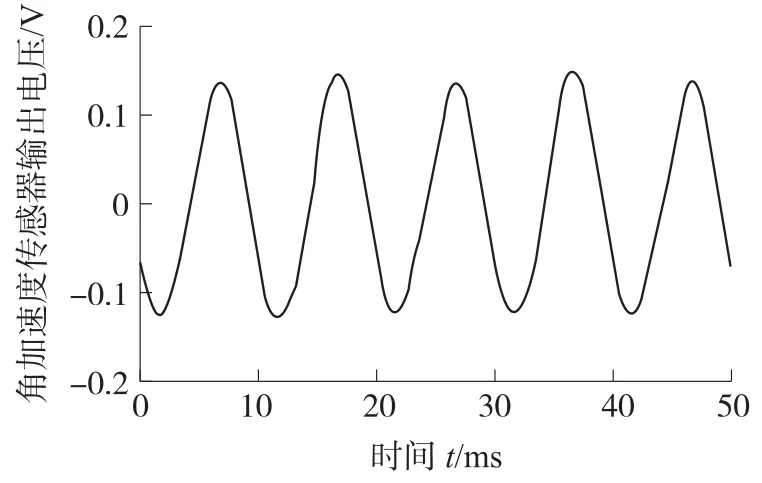
圖7 角加速度傳感器輸出電壓波形
改變激勵源的電壓信號,記錄主、副繞組和電容兩端的電壓,根據式(6)得到旋轉磁場的橢圓度信息,再根據式(3)得到角加速度量值。為了便于分析,實驗時采用峰-峰值對應的方法進行標定,即角加速度峰值-傳感器輸出電壓峰值對應。實驗數據如表1所示,對應的標定曲線如圖8所示,對表1的實驗數據進行線性擬合,由此得到的角加速度傳感器靈敏度約為10.1 mV/(krad/s2),線性誤差約為1.7%。

表1 傳感器標定實驗結果
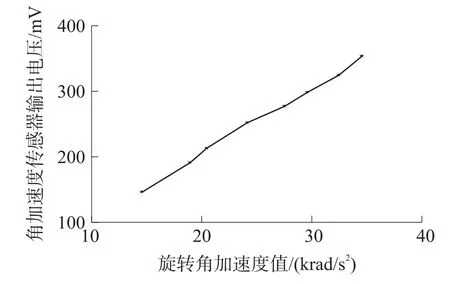
圖8 角加速度傳感器標定曲線
造成線性誤差的原因主要源自角加速度量值的計算過程:橢圓度計算和主、副有效匝數比測量過程中,忽略了主、副繞組的漏阻抗;角加速度激勵源實際空載運行時轉子導條存在感應電流,產生的磁場與旋轉磁場耦合作用;主、副繞組以及電容電壓測量時產生的測量誤差;采用式(3)進行角加速度量值計算時的小數位數取舍誤差。
5 結論
本文提出了一種角加速度傳感器的標定方法,詳細闡述了激勵源產生角加速度量值的工作原理,以及如何獲取計算角加速度量值所需要的參數,最后對實際的角加速度傳感器進行了標定,驗證了該方法的可行性和有效性。該方法能夠實現角加速度量值的直接溯源,相對比較法具有較高的準確度,可望得到推廣和應用。
[1] 趙浩,馮浩.基于電磁感應原理的永磁角加速度傳感器研究[J].傳感技術學報,2012,25(9):1257-1261.
[2] Tran V H,Lee S G.A Stable Formation Control Using Approximation of Translational and Angular Accelerations Int[J].Adv Robot Syst,201:1,65-75.
[3] 于翔,李醒飛,徐夢潔.一種磁流體陀螺的設計研究[J].傳感技術學報,2013,26(11):1483-1487.
[4] Weenk D,van Beijnum B J F,Baten C T M,et al.Automatic Identification of Inertial Sensor Placement on Human Body Segments during Walking.[J].Neuroeng.Rehabil,2013,10,doi:10.1186/ 1743-0003-10-31.
[5] Rueterbories J,Spaich E G,Andersen O K.Characterization of Gait Pattern by 3D Angular Accelerations in Hemiparetic and Healthy Gait[J].Gait Posture,2013(2):183-189.
[6] 薛景峰,彭軍,李新良.角振動校準裝置研究[J].宇航學報,2015,36(3):1-8.
[7] 魏敏,吳忠城,戈瑜.多維角加速度傳感器靜態標定方法研究[J].儀器儀表學報,2005,26(3):286-289.
[8] 劉曉敏,趙云偉.一種精確的小型運動傳感器標定方法與應用[J].長春大學學報,2015,25(10):6-8.
[9] 高揚,張新磊,麥吉.基于加速度計的旋轉平臺角加速度檢測方法[J].宇航計測技術,2015,35(2):14-16.
[10]楊雪松,李長春,母東杰.正弦激勵法在傳感器校準中的新應用[J].傳感器與微系統2014,33(7):154-156,160.
[11]Taubner A,Martens H.Measurement of Angular Accelerations,Angular Velocities and Rotational Angles by Grating Interferometry [J].Measurement,1998(24):21-32.
[12]彭軍,何群,孫豐甲.動態角運動校準技術綜述[J].計測技術,2008,28(5):1-4,9.

趙浩(1983-),男,講師,主要研究方向為新結構傳感器的設計、旋轉機械與傳動系統振動特性分析及抑制方法研究。主持浙江省自然科學基金、浙江省教育廳科研項目和嘉興市科技計劃項目等多項課題,在Sensors、J VIBROENG和傳感技術學報、計量學報等期刊上發表多篇論文,zhaohao204@163.com;

馮浩(1956-),男,教授,一直從事電機與檢測、人工神經網絡技術與應用方面的研究和開發工作。主持國家自然科學基金、浙江省重大科技專項、留學回國人員基金、浙江省自然科學基金等課題多項;已發表論文60余篇,其中有多篇論文被SCI、EI收錄,zjhzfh@126.com。
Research of a Calibration Method for Rotating Angular Acceleration Sensor*
ZHAO Hao1*,FENG Hao2
(1.Nanhu College of Jiaxing University,Jiaxing Zhejiang 314001,China;2.Automation college of Hangzhou Dianzi University,Hangzhou 310018;China)
For the calibration problem of angular acceleration sensor,a calibration method is presented in this paper. The angular acceleration excitation source is generated by servo motor,and angular acceleration sensor is connected with the excitation source coaxially.The amplitude of angular acceleration can be adjusted by adjusting electrical parameters of excitation source,the characteristic of sensor is received after measuring the sensor output voltage.In this paper,the working mechanism of angular acceleration excitation source is described in detail,the theoretical formula of angular acceleration is deduced,and the parameters measuring method for calculating angular acceleration is given.Finally,a induction angular acceleration sensor is calibrated by this method,and the feasibility is verified.
angular acceleration;rotating magnetic field;ellipse;effective turns ratio
TP212
A
1004-1699(2016)04-0495-05
項目來源:國家自然科學基金項目(51541507);浙江省自然科學基金項目(LQ14E050007);嘉興市科技計劃項目(2015AY11018)
2015-10-29修改日期:2015-12-25
