航天電源控制器集成模塊的控制策略及參數設計方法
2016-10-11 02:45:07游小杰郭希錚
電工技術學報 2016年8期
關鍵詞:控制策略
李 芳 游小杰 李 艷 郭希錚
(北京交通大學電氣工程學院 北京 100044)
航天電源控制器集成模塊的控制策略及參數設計方法
李 芳 游小杰 李 艷 郭希錚
(北京交通大學電氣工程學院 北京 100044)
在航天器太陽電池陣——蓄電池電源系統中,采用新型電源控制器(PCU)集成模塊替代原有PCU中的多個功率調節器,可以簡化電路結構,降低系統成本。但是PCU集成模塊的控制策略需要改進,并且電路參數設計更加復雜。提出該模塊在兩種不同續流方式時的控制策略,并對其中的分域控制和雙頻率PWM控制進行詳述。在此基礎上,通過詳細分析不同工作模式時的輸入、輸出特性,提出PCU集成模塊的電路參數設計方法。最后,搭建了一套110W的原理樣機并進行了實驗驗證。
電源控制器 集成模塊 控制策略 雙頻率PWM控制 參數設計
0 引言
近地軌道衛星的太陽電池陣——蓄電池電源系統主要由太陽電池陣(Solar Array, SA)、可充電蓄電池組和電源控制器(Power Conditioning Unit, PCU)組成。目前PCU通常采用基于順序開關分流調節器(Sequential Switching Shunt Regulator, S3R)的全調節母線結構,包含S3R、蓄電池充電功率調節器(Battery Charge Regulator, BCR)和蓄電池放電調節器(Battery Discharge Regulator, BDR)三個功率調節器,以及母線支撐電容和母線電壓主誤差放大器(Main Error Amplifier, MEA)[1-4]。
PCU通過MEA控制功率調節器的工作狀態,實現對太陽電池陣和蓄電池的功率調節,從而維持母線電壓穩定。當衛星位于地影期或者 SA不足以提供負載功率時,蓄電池組通過BDR放電以維持母線電壓穩定;當衛星位于陽照期,若 SA能量不足以提供蓄電池最大電流充電時,BCR調節蓄電池的充電電流以維持母線電壓穩定;若 SA提供能量充足,蓄電池以最大電流值限流充電,S3R工作以消耗多余能量[5,6]。
為了降低電源系統的制造成本和航天器的發射成本,新型電源控制技術向集成化和模塊化發展,多種新型的 PCU優化拓撲被報道。如文獻[7,8]將BCR和BDR集成為雙向功率變換器(Battery Charge and Discharge Regulator, BCDR)實現蓄電池充、放電功能;文獻[9-11]采用S4R(sequential switching shunt series regulator)結構同時調節母線電壓和蓄電池充電電流,省去了 BCR。以上兩種方法將三個功率調節器簡化為兩個,在文獻[12-19]中將三個功率調節器集成為一個。例如文獻[12,13]中S3R添加了輸出電感,BCR與S3R共用開關管吸收回路,但電路形式復雜,實用性不高。文獻[14]提出B3R(buckbuck-boost regulator)結構,實現了功率集成,但是器件個數較多且控制較復雜,部分開關器件耐壓較高,并不能有效減重。文獻[15-17]提出基于雙向Superbuck的 BCDSR (battery charge discharge shunt regulator)模塊,可實現PCU全部功能,電路簡單并且集成度較高,但是并未詳細分析各種工作模式時的輸入、輸出關系。文獻[18]提出隔離三端口電路,由隔離變壓器、三個開關管、兩個同步整流管組成,可實現多種工作模式,并且集成化程度較高,但器件數量較多且控制方法相對復雜。
文獻[19,20]提出一種新型非隔離 PCU電路拓撲,本文基于該PCU集成模塊,對兩種不同續流方式的控制策略進行研究。通過詳細分析各種工作模式的輸入、輸出關系,提出PCU集成模塊儲能器件參數設計方法。最后,搭建原理樣機并驗證了該集成模塊的可行性。
1 PCU集成模塊及其控制策略
PCU集成模塊包括雙向變換器、輸出二極管VDout和母線支撐電容Cbus三個部分,其中雙向變換器為Buck/Boost拓撲,結構如圖1所示。
PCU集成模塊有三種工作模式。模式Ⅰ:在地影期或太陽電池陣輸出功率不足以提供負載時,蓄電池通過Buck電路放電,此時S2作為主控管以高頻周期開關工作,S1續流,蓄電池的最大放電電流為Id。模式Ⅱ:在陽照期,若ibat<Ilim,SA輸出功率供給負載后的剩余功率全部為蓄電池充電,變換器工作在類Boost狀態,此時S1作為主控管以高頻周期開關工作,S2續流。模式Ⅲ:在陽照期,若能量充足,蓄電池以限流值Ilim充電,開關管S1存在長時間導通過程,此時太陽電池陣輸出電流全部被 S1分流,雙向變換器工作在Boost與分流狀態,S1以高、低兩個開關頻率工作,S2續流。
當主控開關管工作時,另一只開關管作為輔助管續流。續流方式有兩種:可以通過體二極管續流;也可以令開關管導通續流,即同步整流。圖2為采用體二極管續流時的工作模式示意圖。兩種續流方式均可實現PCU集成模塊功能,但是控制策略有所不同,下文將分別介紹。

圖1 PCU集成模塊結構示意圖Fig.1 Diagram of integrated PCU module

圖2 PCU集成模塊工作模式示意圖Fig.2 The working mode of integrated PCU module
1.1體二極管續流
采用體二極管續流時,開關管的驅動信號恒為低電平,不工作。即工作模式Ⅰ時,S2有驅動脈沖信號,而S1保持關斷狀態;工作模式Ⅱ和Ⅲ時,S1有驅動脈沖信號,而S2保持關斷狀態。PCU集成模塊采用體二極管續流方式時,雙頻率PWM控制策略實現方法如圖3a所示。
頂層分域控制策略與傳統 PCU分域控制策略類似,母線電壓 MEA采集母線電壓信號,經過補償器后輸出控制信號vMEA。當母線電壓略低時,蓄電池放電,此時 vMEA值較低,開關管 S2的比較器載波幅值較低,輸出驅動脈沖信號,而開關管 S1的比較器載波幅值較高,驅動信號為低電平(Buck狀態)。當母線電壓略高時,能量充足,蓄電池充電,此時vMEA較高,S1開關工作,S2關斷(Boost狀態)。
當雙向變換器工作蓄電池充電即 Boost狀態時,若ibat<Ilim,蓄電池電流誤差信號(Battery Error Amplifier, BEA)負飽和,即BEA補償器輸出信號vBEA與低頻載波相比后輸出恒為低電平,此時僅母線電壓環工作,S1高頻開關工作,S2關斷。當蓄電池限流充電時,BEA信號退飽和,輸出低頻PWM驅動信號,該信號與高頻PWM驅動信號邏輯“或”之后為S1的最終驅動信號。當低頻PWM驅動信號為高電平時,S1長時間導通;為低電平時,S1工作在高頻開關狀態。因此,通過母線電壓環和蓄電池充電電流環兩個控制環的邏輯“或”運算,S1的驅動信號包含高頻占空比和低頻占空比兩個控制自由度,可實現同時控制母線電壓和蓄電池充電電流。
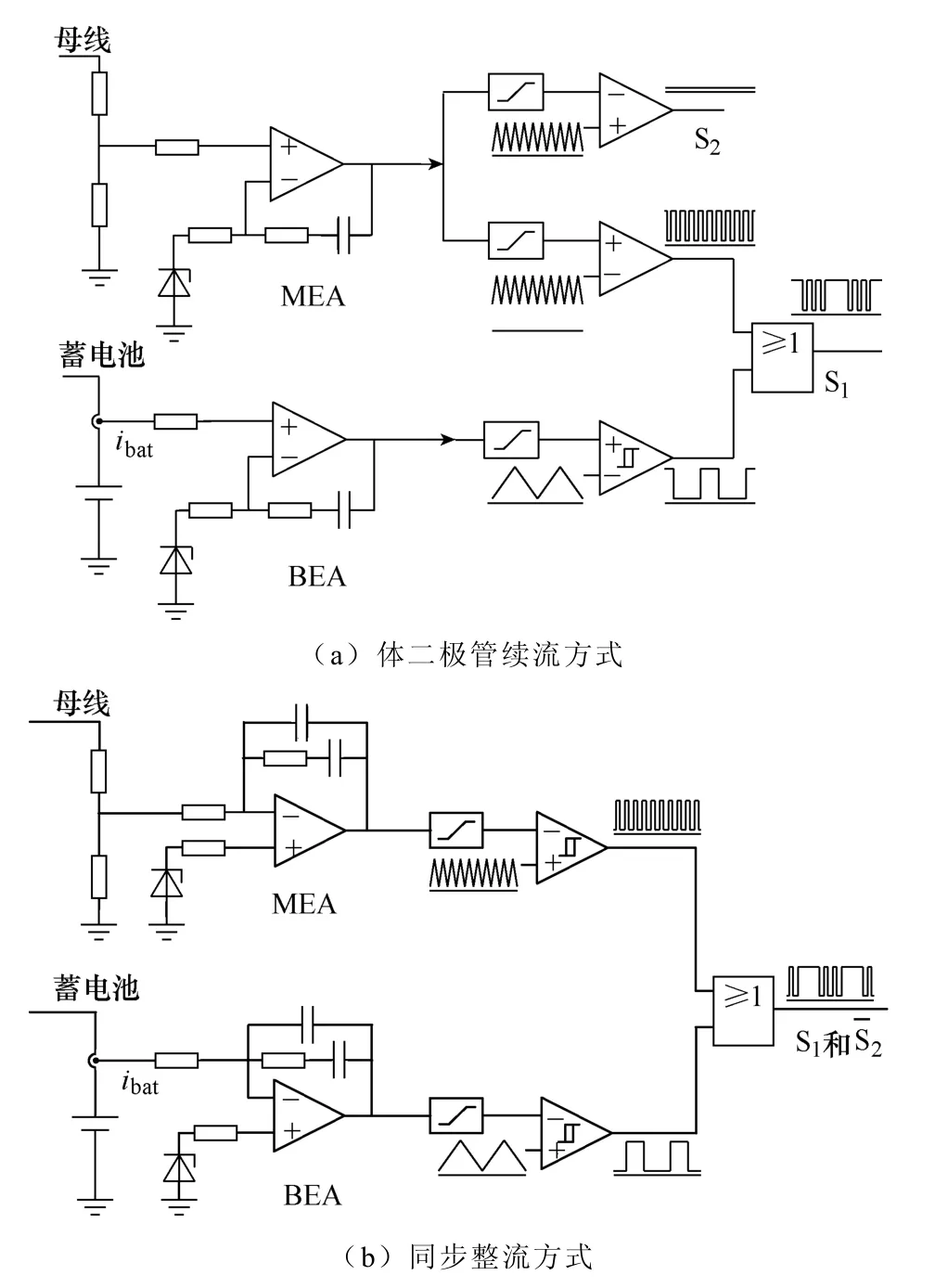
圖3 雙頻率PWM控制策略實現方法示意圖Fig.3 The schematic diagram of dual-frequency PWM control
1.2同步整流
采用同步整流方式且工作模式Ⅰ、Ⅱ和Ⅲ時,S1和 S2均工作在開關狀態,兩者的信號為互補形式。雙頻率PWM控制策略實現方法示意圖如圖3b所示,與上一種控制策略相同,包含了兩個環路,母線電壓環和蓄電池充電電流環,并且控制信號分別與高頻載波和低頻載波相比較,輸出驅動脈沖。不同的是母線電壓環僅有一種載波信號,并且輸出為S1的驅動信號,即S2驅動信號的互補信號。
同步整流方式時,控制策略的工作原理是:工作模式Ⅰ和Ⅱ時,蓄電池不需要限流充電,BEA信號正飽和,比較器輸出為低電平,此時僅母線電壓環工作。當母線電壓略高時,MEA信號降低,輸出S1占空比增加,電感電流升高,供給母線負載電流降低;當母線電壓略低時,MEA信號升高,輸出S1占空比降低,電感電流減小(甚至反向增加),供給母線負載電流增加,母線電壓逐漸升高。因此在此控制策略下,工作模式Ⅰ和Ⅱ之間沒有明顯的死區,僅僅是兩個開關管占空比的變化。工作模式Ⅲ時,BEA信號退飽和,輸出低頻PWM信號。當蓄電池的充電電流略高于設定值時,BEA信號略有下降,低頻PWM信號的高電平時間增加,即S1分流時間增加,SA輸出總功率減小,蓄電池的充電電流減小;反之亦然。
兩種續流方式及其控制策略均利用蓄電池充電較慢的特性,采用低頻PWM控制即可實現一段時間內對蓄電池充電電流的控制。由于工作模式Ⅲ時,控制信號中包含了兩個頻率的PWM信號,因此命名為雙頻率PWM控制。
2 PCU集成模塊的輸入輸出關系
雖然體二極管續流方式與同步整流方式的控制策略不同,但是在工作模式Ⅰ和Ⅱ電感電流連續時,兩種續流方式的工作原理相同,即輸入、輸出關系相同。而工作模式Ⅲ存在長時間分流工況,此時電感電流恒為太陽電池陣電流ISA,并且在開關管高頻動作階段,電感電流可能下降到零,若采用體二極管續流方式,電感電流不可以反向,電感電流近似為零,而同步整流方式電感電流下降過零后還可繼續下降。因此,工作模式Ⅲ時的PCU集成模塊兩種續流方式的輸入、輸出關系不同,下面將分別討論。
2.1工作模式Ⅰ
設高頻開關周期為T,開關管S2的占空比為q2,假設電感電流的正方向如圖1所示,蓄電池的放電電流為 Idch,開關管 S2導通和關斷時的電感電壓和電容電流為


設控制變量 q2的穩態值為 Q2,由電感的伏秒平衡和電容電流的充放電平衡可得出該工作模式的穩態解為

則蓄電池的放電電流為

母線負載功率為

2.2工作模式Ⅱ
設高頻開關周期為T,開關管S1工作的占空比為q1,假設電感電流的正方向如圖1所示,設蓄電池的充電電流為Ich,開關管S1導通和關斷時的電感電壓和電容電流為

設控制變量 q1的穩態值為 Q1,由電感的伏秒平衡和電容電流的充放電平衡可得出該工作模式的穩態解為

可計算蓄電池的充電電流為

2.3工作模式Ⅲ
PCU集成模塊采用雙頻率PWM控制策略,雙向變換器工作在 Boost與分流狀態。假設高頻開關周期為 T,低頻開關周期為 Ts,開關管 S1的高頻PWM占空比為q1,低頻PWM低電平時間占整個周期的比值為d1。此時蓄電池限流充電,蓄電池端電壓為Vbat,充電電流限幅值為Ilim,設蓄電池等效電阻 Rbat=Vbat/Ilim。
電感L的電流正方向如圖1所示,SA流向蓄電池側為正。并且假設穩態工作時,雙頻率 PWM的占空比均維持恒定,母線電壓和蓄電池電壓基本維持恒定。在一個低頻周期內,若電感電流值未下降至零,兩種續流方式的電感電流波形與S1驅動信號vg1波形如圖4a所示,定義為工作模式Ⅲa。電感電流在[0, d1Ts]區間隨開關管的高頻動作工作為波動下降狀態,[d1Ts, Ts]中的[d1Ts, (d1+d2)Ts] 區間持續上升,而在[(d1+d2)Ts, Ts] 區間恒定為 ISA。若低頻周期內電感電流下降至零,采用體二極管續流方式的波形如圖4b所示,電感電流下降至零后,開關管高頻脈沖工作時存在微小的上升和下降,可近似為零,定義為工作模式Ⅲb。采用同步整流方式的波形如圖 4c所示,電感電流波動下降至 d1Ts時刻結束,之后電感電流線性上升,再恒為ISA,定義為工作模式Ⅲc。

圖4 工作模式Ⅲ關鍵波形示意圖Fig.4 Key waveforms of different statues in mode Ⅲ
所有工作模式均須滿足當開關管高頻關斷階段電感電流下降,并且一個高頻周期結束時電感電流小于周期初始值,即

化簡可得

2.3.1工作模式Ⅲa
工作模式Ⅲa需要滿足兩個條件:電感電流的變化值小于ISA;d1和d2之和小于1,即設控制變量d1和d2對應的穩態值分別為D1和D2,求解得

電感電流先波動下降,后持續上升,最后恒定為ISA。三個階段的電感電壓和電容電流方程分別為

式中,IL為[0, (d1+d2)Ts]區間電感電流的平均值;Iload為負載電流在一個周期內的平均值。因此可以添加一個等式

綜上,穩態解滿足

此時,母線負載功率和蓄電池充電功率為

2.3.2工作模式Ⅲb
電感電流在[0, d1Ts]區間下降至零后,隨開關管的高頻開關動作上升、下降,由于幅值較小,此階段將電感電流近似為零。設電感電流從 ISA下降為零的時間為dTs。
工作模式Ⅲb需要滿足兩個條件:電感電流在d1Ts階段下降為零;d1和d2之和小于1,即

求解穩態值關系為

工作模式Ⅲb在Ⅲa的基礎上增加了一個工作區間,即[dTs, d1Ts],IL近似為零,SA 輸出電流全部為母線負載供電。該區間電感電壓和電容電流關系為

式中,IL為在[0, dTs]和[d1Ts, (d1+d2)Ts]區間內的電感電流的平均值;Iload為負載電流在一個周期內的平均值。設d的穩態值為D,因此可以添加一個等式

綜上,穩態解滿足

此時,母線負載功率和蓄電池充電功率為
2.3.3工作模式Ⅲc
工作模式Ⅲc與工作模式Ⅲa類似,同樣包含三個階段,僅電感電流的下降幅值不同。兩種工作模式的邊界條件是

將穩態值代入求解,可得邊界條件為

即邊界條件滿足兩個端口的功率相等。
三個階段的電感電壓和電容電流方程與工作模式Ⅲa相同,詳見式(13)~式(15)。
3 PCU集成模塊的參數設計方法
3.1電感L
當PCU集成模塊工作在模式Ⅰ時,計算電感電流紋波值

電感電流紋波應小于穩態值的20%,可得

工作模式Ⅱ時電感電流紋波值

在工作模式Ⅲb時,若 D1+D2=1,蓄電池的充電功率最小,為電路限制的最小值。此時滿足

代入參數,化簡為
根據所需的蓄電池最小充電功率可以確定相應的電感最大值,即

因此,采用體二極管續流方式時,電感L的取值范圍為

若采用同步整流方式,在工作模式Ⅲc時,電感電流可在一個周期內下降至零以下,即滿足

求解可得

同時電感值不能過小,即在d1Ts時刻,電感電流值不能低于?ISA,且在低頻周期結束時可上升至ISA,穩態值需要滿足

求解可得

由于 Ts>>T,因此采用同步整流方式的電感值取值范圍應當滿足

3.2母線支撐電容陣Cbus
工作模式Ⅰ時,母線電壓的紋波值為

工作模式Ⅱ時,母線電壓的紋波值為

工作模式Ⅲa時,采用[(d1+d2)Ts, Ts]區間電容電壓的下降值近似作為母線電壓的紋波值,母線電壓紋波近似為

當D1+D2=0.5、ΔIL=ISA時,母線電壓紋波最大,為

工作模式Ⅲb時,可采用[(d1+d2/2)Ts, (1+d/2)Ts]區間電容電壓的下降值近似為母線電壓紋波值,即

同理,母線電壓紋波最大值為

因此,采用體二極管續流方式時,由于Ts>>T,因此母線支撐電容值應該滿足

采用同步整流方式時,在工作模式Ⅲc時,電感電流最低可下降至?ISA,即ΔiL的最大值為2ISA,代入式(38)可得,該方式時電容取值應滿足

由于同步整流方式電感電流的波動值較大,所需電容的數值也較大。
3.3蓄電池側濾波電容C1
工作模式Ⅰ時,C1可以視為雙向變換器工作Buck狀態的輸入濾波器,蓄電池可以視為電壓源,C1僅需很小數值即可實現高頻濾波功能。
工作模式Ⅱ時,雙向變換器工作在Boost狀態,C1高頻電壓紋波為

令1CVΔ小于穩態值batV的可以求解C1的最小值為

工作模式Ⅲ時,C1需要對低頻充電電流進行濾波,當低頻占空比相同時,Q1=0時的蓄電池充電電流最大,電壓紋波也最大。因此僅考慮 Q1=0時,不同D1時不同工況的蓄電池側電壓紋波。
工作模式Ⅲa時,[d1Ts, Ts] 區間電容以 IRbat放電,電壓紋波值為

IRbat與電感電流的下降斜率和占空比 D1等有關,且滿足IRbat<D1ISA,近似計算可得此狀態電容電壓紋波的最大值為

工作模式Ⅲb時,[dTs, Ts] 區間電容以 IRbat放電,IRbat=DISA/2,電容電壓紋波值為

因此采用體二極管續流方式時,由于Ts>>T, C1應該按照進行設計,即 C1應滿足

而采用同步整流方式時,工作模式Ⅲa計算方法相同,但是在工作模式Ⅲc時,長周期內電感電流過零時,存在蓄電池放電現象。考慮極端工況,當蓄電池充電電流為零,即ΔiL為最大值2ISA時,電容放電電流平均值滿足

因此電容計算式與式(49)、式(51)相同。工作模式Ⅲc的兩個邊界條件對電容的需求值相同,因此采用同步整流方式的蓄電池側電容取值與采用體二極管續流方式的電容值相同。
文中將蓄電池等效為電阻進行分析,該電路參數應用于蓄電池時性能更優。
4 實驗
為了驗證PCU集成模塊的工作原理,在實驗室制作了一臺 28V/4A原理樣機,采用體二極管續流方式,其主要參數如下:SA輸出電流4A,母線電壓28V,母線電壓紋波值500mV,蓄電池電壓60V,蓄電池充電功率最低值 14W,開關頻率 fs=2kHz、f=100kHz,電感L=400μH,電容Cbus=1.5mF,電容C1=500μF。
首先進行開環實驗,分別設置占空比 d1和 q1的值,采用60V恒壓負載模擬蓄電池,設置母線負載值令母線電壓為28V,測量電感電流的波形變化,如圖5所示。

圖5 PCU集成模塊開環實驗波形Fig.5 Open-loop experimental results of integrated PCU module
PCU集成模塊閉環工作,在工作模式Ⅰ時采用60V恒壓源模擬蓄電池,ISA=0,波形如圖6a所示;工作模式Ⅱ閉環狀態時,蓄電池采用60V恒壓電子負載模擬,開關管S1工作在高頻開關狀態,波形如圖6b所示;工作模式Ⅲ時蓄電池充電電流限幅值為0.6A,蓄電池采用100Ω恒定電阻模擬,母線負載為恒流負載,當在工作模式Ⅲ發生負載階躍時的波形如圖6c所示。

圖6 PCU集成模塊閉環實驗波形Fig.6 Closed-loop experimental results of integrated PCU module
通過實驗結果可以看出,采用體二極管續流方式的 PCU模塊可以實現三種工作模式的閉環穩定工作。在工作模式Ⅲ時,通過雙頻率PWM控制可以同時控制母線電壓和蓄電池的充電電流,并且當母線負載發生階躍時,PCU集成模塊可以跟蹤負載電流變化,并且穩定蓄電池充電電流。
5 結論
PCU集成模塊結構簡單、成本低,本文針對該集成模塊的控制方式展開了研究,對三種不同工作模式進行劃分,分別給出采用體二極管續流及同步整流方式的控制策略及工作原理。針對不同的工作模式及續流方式,分析該集成模塊的輸入、輸出關系,重點分析雙頻率PWM控制的各種工作狀態及不同續流方式的不同之處。然后,在電路分析基礎上,給出兩種續流方式時PCU模塊中儲能器件參數的設計方法。最后,搭建實驗平臺,實驗結果表明PCU集成模塊能夠正常工作,驗證了其控制策略及參數設計方法的合理性。
[1] Patel M R. Spacecraft power system[M]. Florida: CRC Press, 2005.
[2] Capel A, O'Sullivan D, Marpinard J C. High-power conditioning for space applications[J]. Proceedings of the IEEE, 1988, 76(4): 391-408.
[3] Zhu H, Zhang D. Influence of multijunction Ga/As solar array parasitic capacitance in S3R and solving methods for high-power applications[J]. IEEE Transactions on Power Electronics, 2014, 29(1): 179-190.
[4] Castiaux J P, Bury P, Liegeois B. Power conditioning units for high power geostationary satellites[C]// Power Electronics Specialists Conference, IEEE 28th Annual PESC, Saint Louis, Missouri, 1997, 1: 722-733.
[5] 苗狄, 張東來. 獨立光伏電源控制器建模及高動態性能研究[J]. 電工技術學報, 2011, 26(7): 75-82. Miao Di, Zhang Donglai. Modeling of stand-alone PV power controller and high dynamic performance research[J]. Transactions of China Electrotechnical Society, 2011, 26(7): 75-82.
[6] 陳騫, 鄭瓊林, 李艷, 等. 一種高效率蓄電池放電調節器的優化設計與損耗分析[J]. 電工技術學報, 2013, 28(8): 224-232. Chen Qian, Zheng Trillion Q, Li Yan, et al. Parameter design and power loss analysis of a high efficiency battery discharge regulator[J]. Transactions of China Electrotechnical Society, 2013, 28(8): 224-232.
[7] Weinberg S H, Lopez A. A bidirectional BDR/BCR for satellite applications[C]//The 5th European Space Power Conference, Tarragona, 1998: 27-32.
[8] 谷雨. 雙向高效率 DC-DC變換器的研究[D]. 哈爾濱: 哈爾濱工業大學, 2011.
[9] Capel A, Perol P. Comparative performance evaluation between the S4R and the S3R regulated bus topologies[C]//Power Electronics Specialists Conference, Vancouver, 2001, 4: 1963-1969.
[10] Garrigós A, Carrasco J A, Blanes J M, et al. A power conditioning unit for high power GEO satellites based on the sequential switching shunt series regulator[C]//Electrotechnical Conference, MELECON IEEE Mediterranean, Malaga, 2006: 1186-1189.
[11] 苗狄, 張東來, 張乃通. 基于ΔΣ 超頻的高功率密度空間功率平臺[J]. 電工技術學報, 2013, 28(8): 233-240. Miao Di, Zhang Donglai, Zhang Naitong. Research on space power conditioning unit with high power density based on ΔΣ overclocking characteristics[J]. Transactions of China Electrotechnical Society, 2013, 28(8): 233-240.
[12] Perol P. Another look at the sequential switching shunt regulator[C]//The 5th European Space Power Conference, Tarragona, 1998: 79-84.
[13] Perol P. Converter module for an electrical power supply and a system include it: US, 6 259 234 B1[P]. 2001.
[14] Mourra O, Fernandez A, Tonicello F, et al. Multiple port DC DC converter for spacecraft power conditioning unit[C]//Applied Power Electronics Conference and Exposition (APEC), 2012 29th Annual IEEE, Orlando, Florida, 2012: 1278-1285.
[15] Perol P. An efficient low modular system for fully regulated bus in low earth orbit applications[C]//The 6th European Space Power Conference, Porto, Portugal, 2002: 375-381.
[16] Perol P. Electrical power supply converter: US, 6617831B2[P]. 2003.
[17] 李國欣. 航天器電源系統技術概論[M]. 北京: 中國宇航出版社, 2008.
[18] Qian Zhijun, Abdel-Rahman O, Al-Atrash H, et al. Modeling and control of three-port DC/DC converter interface for satellite applications[J]. IEEE Transactions of Power Electronics, 2010, 25(3): 637-649.
[19] Li Fang, You Xiaojie, Li Yan. Design of a multi-port converter using dual-frequency PWM control for satellite applications[C]//IEEE Twenty-Ninth Annual Applied Power Electronics Conference and Exposition (APEC), Fort Worth, Texas, 2014: 1178-1184.
[20] 李芳, 游小杰, 李艷. 航天用非隔離集成三端口變換器的建模與控制系統設計[J]. 電工技術學報,2014, 29(增1): 291-300. Li Fang, You Xiaojie, Li Yan. Modeling and control loop design of non-isolated three-port DC-DC power converter for satellite applications[J]. Transactions of China Electrotechnical Society, 2014, 29(S1): 291-300.
Control Strategy and Parameter Design of Power Conditioning Unit Integrated Module for Satellite Applications
Li Fang You Xiaojie Li Yan Guo Xizheng
(Institute of Power Electronics Beijing Jiaotong University Beijing 100044 China)
In the solar array-battery power system of satellites, compared with the conventional power conditioning unit (PCU) that contains three converters, the novel integrated module has such advantages as simpler circuit, more compact and lower cost. However, the control strategy and parameter design of this novel module are very complex. The control strategies for the module operating at different freewheeling methods, which contain domain control and dual-frequency PWM control, are proposed in this paper. Based on the detail analysis of input and output characteristics at different operating modes, parameter design is provided. A 110W prototype is built to verify the theoretical analysis.
Power conditioning unit, integrated module, control strategy, dual-frequency PWM control, parameter design
TM46
李 芳 女,1988年生,博士研究生,研究方向為航天電源系統、中小功率變換與控制技術。
E-mail: hahalifang@163.com(通信作者)
游小杰 男,1964年生,教授,博士生導師,研究方向為電力電子與電力傳動。
E-mail: xjyou@bju.edu.cn
北京市科技計劃課題資助項目(Z141100003114011)。
2014-05-04 改稿日期 2014-06-06
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
