電力牽引傳動系統微秒級硬件在環實時仿真
2016-10-11 02:46:13葛興來宋文勝馮曉云
電工技術學報 2016年8期
關鍵詞:模型
郝 琦 葛興來 宋文勝 馮曉云
(西南交通大學電氣工程學院 成都 610031)
電力牽引傳動系統微秒級硬件在環實時仿真
郝 琦 葛興來 宋文勝 馮曉云
(西南交通大學電氣工程學院 成都 610031)
為滿足電力牽引傳動系統高速實時仿真的需求,分析了交直交牽引傳動系統的結構及其原理,建立了現場可編程門陣列硬件在環(HIL)仿真模型,其中包含單相脈沖整流器、中間直流回路、三相兩電平逆變器以及異步電機四部分。對于含有開關器件的結構——逆變器和整流器,分別推導出它們不同狀態下各自開關函數的邏輯表達式,考慮了變流器電流過零點時的換流情況。采用狀態方程及矩陣方程分別對變流器以及異步電機進行建模,并將數學模型集成在FPGA中加以實現,在RT-LAB實時仿真器上進行HIL仿真,驗證了仿真平臺的正確性。由于采用FPGA模擬牽引傳動系統,充分發揮了其善于并行計算的特性,大幅縮短了仿真的步長,突破了中央處理器速度限制,實現了微秒級系統模型實時仿真,提高了HIL仿真系統的響應速度以及準確度。
現場可編程邏輯陣列 微秒級 硬件在環 電力牽引傳動系統 實時仿真 交直交
TM922
0 引言
近年來,在電力電子和電氣傳動領域,硬件在環(Hard-In-the-Loop, HIL)作為一種快速、安全和可靠驗證控制器算法的途徑逐漸得到了廣泛應用[1]。開發過程中加入HIL仿真,可以提前測試系統的控制參數和算法,有效減少了研發的周期與成本[2]。在HIL仿真系統中,實時仿真器用數學模型模擬實際裝置,實際控制器對其模型加以控制,二者進行數據交互,實現了系統多參數、多運行條件的測試,并具有靈活性好、體積小、周期短和準確度高等優點[3]。
文獻[4,5]針對不同拓撲結構的電力牽引傳動系統,建立實時仿真模型,仿真步長分別為 40μs和60μs,測試驗證了模型的正確性。文獻[6]為避免電力電子實時仿真模型求解發散,給出不同電路拓撲下能夠保證模型求解收斂穩定的最大步長。文獻[7]為了提高實時仿真準確度,研究了開關器件在相鄰仿真時刻間動作時的補償算法。無論是為了避免模型求解發散或是為了提高仿真準確度,縮小仿真步長都是最為直接有效的方法。
傳統HIL仿真中,由中央處理器(CPU)承擔模型解算工作,由于其模擬程序采用串行計算方式,速度難以進一步提升,HIL仿真步長通常在 10μs數量級[8]。較高的仿真步長意味著低采樣速率,為了精確體現控制器脈沖控制效果,只能通過額外器件精確抓取脈沖變化時間,在下一個仿真周期中引入算法加以補償。如若強制縮短仿真步長,又會導致計算超時,進而引起仿真數值的不穩定。HIL系統中負責數據交互的模-數、數-模器件頻率動輒上兆赫茲,控制器——FPGA或 DSP,其控制周期也能達到10μs這一數量級。顯然,實時仿真器的速度已經成為仿真系統的瓶頸,影響了實時仿真速度進一步提升。
目前為止,FPGA憑借其高時鐘頻率、高可靠性和多輸入、輸出等特點,承擔了電力電子裝置驅動脈沖發生工作,應用已非常普遍[9-11]。在 HIL仿真方面,FPGA主要應用在硬件接口中,承擔仿真器與控制器間信號交換[12]。但是,FPGA還具備潛力替代CPU成為電力電子系統的仿真運算單元。文獻[13]分析了電力電子器件的開關特性和換流過程,并在FPGA中實現其實時仿真,在器件級的水平上反映出開關過程中電壓、電流尖峰及功率損耗等關鍵指標。文獻[14]針對兩電平電壓源型逆變器及異步電機進行建模,采用FPGA對系統模型進行仿真,仿真步長為10μs,實現了對電機的矢量控制HIL實時仿真。
本文以交直交電力牽引傳動系統為對象,提供了一種高速實時仿真的建模和實現方法,完成了牽引傳動系統1μs步長的HIL仿真。基于硬件描述語言(Hardware Description Language,HDL)在FPGA中實現了電力牽引傳動系統主電路拓撲建模以及牽引異步電機建模,構建了電力牽引交流傳動系統HIL仿真平臺,并完成了實時仿真模型HIL仿真測試。與傳統基于CPU的實時仿真系統相比,仿真步長大幅減小,仿真模型動態響應速度提高,此外還避免CPU模型解算中復雜的時間補償算法,提高了仿真準確度。
1 電力牽引傳動系統HIL仿真簡介
電力牽引傳動系統包括牽引變壓器、單相脈沖整流器、中間直流回路、三相兩電平逆變器和牽引異步電機[15]。牽引變壓器將單相 50Hz工頻交流降壓,供給單相整流器,后者將交流電變為直流電,并通過中間直流回路輸送給逆變器。逆變器將直流電變換為頻率幅值可變的三相交流電,驅動牽引異步電機,為整個系統提供動力[16]。
圖1給出了電力牽引傳動系統HIL仿真框圖。與傳統實時仿真相比,將被控對象的模型由CPU中轉移到FPGA芯片中進行計算。采用雙DSP分別作為整流器系統和逆變器電機系統的控制器。脈沖整流器系統控制算法采用瞬態電流控制,調制算法采用SPWM。逆變器電機系統控制算法采用轉子磁場定向間接矢量控制,調制算法采用 SVPWM,其中低速區為異步調制,中高速區為分段同步調制。

圖1 電力牽引傳動系統HIL仿真框圖Fig.1 HIL of electrical traction drive system
2 牽引變流器建模
Matlab/Simulink、PSCAD等仿真軟件在求解電路時,根據其拓撲和參數將待求電路化為高階方程組,并進行求解,其中涉及到行列式變換、矩陣乘法求逆等,這類復雜運算在FPGA上實現較為困難。為滿足實時仿真系統的高速性,本文采用狀態方程對變流器進行建模,忽略器件導通時的電阻和關斷時的電導,便于牽引變流器模型的求解。將整流器、逆變器以及連接二者的直流電路視為變流器的三個核心部分,進行統一建模。整流器、逆變器共同完成了交直交傳動系統的電能變換,中間直流回路作為兩者能量傳輸的橋梁。
2.1單相脈沖整流器及直流環節模型
牽引變壓器將供電系統的電能變換電壓等級,變壓器一次側、二次側電動勢同頻率、同相位,僅幅值不同。為降低仿真系統的復雜度,建模時只考慮變壓器二次側,將其等效為正弦交流電源與變壓器二次側漏電感Ls和繞組電阻Rs串聯,如圖2所示。

圖2 單相整流器及直流環節電路結構Fig.2 Topology of the single-phase rectifier and DC-link circuit
單相整流器由a橋和b橋兩個橋臂組成,每個橋臂包含兩個IGBT和兩個二極管,共同組成一個全控橋電路。建立整流器理想開關函數,描述a橋、b橋導通關斷,其開關函數Sra、Srb狀態可定義為

則整流器輸出電流和輸入端電壓可以分別用開關函數表示為

式中,udc為直流側電壓;uab為整流器輸入端電壓;is為變壓器二次電流;ir為整流器輸出電流。
中間直流回路包含一個直流電容器 Cdc和一個包含電感L2和電容C2的LC濾波電路,后者的諧振頻率設置為100Hz。
至此,將整流器、變壓器與中間直流回路聯合起來,圖2所示的電路拓撲數學模型可以描述為
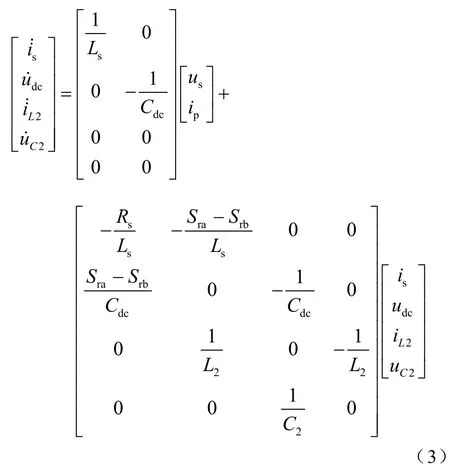
式中,Cdc為直流側電容;C2為濾波電路電容;L2為濾波電路電感;us為變壓器二次電壓;uab為整流器輸入端電壓;uC2為電容 C2電壓;iL2為電感 L2電流;ip為直流電路輸出電流。
2.2牽引逆變器模型
逆變器主電路如圖3所示,它由三相橋臂u、v 和w組成,每個橋臂有兩個IGBT以及與其反并聯的二極管構成,共同構成三相電壓源型逆變器。
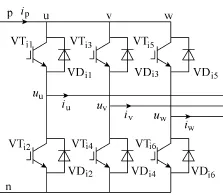
圖3 三相兩電平逆變器電路拓撲Fig.3 Topology of the three-phase two-level inverter
與整流器類似,用開關函數描述逆變器開通關斷狀態,即

在牽引傳動系統中,逆變器向電機提供三相交流電壓。取直流側支撐電容中點為零電位點,則電機三相輸入電壓及直流回路輸出電流可以描述為

式中,uu、uv和uw分別為電機u、v和w三相輸入電壓;iu、iv和iw分別為電機u、v和w三相電流。
2.3FPGA實現
對于整流器和逆變器,開關函數取值由其接收控制器的觸發脈沖所決定。
以整流器為例,整流器拓撲包含四個開關管,開關管信號組合有24=16種,其中有七種信號組合會引起直流母線短路,排除后仍有九種,而開關函數Sra與Srb組合僅有22=4種,開關函數與觸發脈沖存在一定的映射關系。因此,首先要確定如何根據觸發脈沖來獲得開關函數。
變壓器漏電感的續流作用會維持變壓器二次電流 is方向不變,而電流流向的不同也會影響橋臂導通關斷狀態。枚舉出 is為任意方向時,不同觸發脈沖組合對應的開關函數,表1給出了具體開關函數取值。

表1 觸發信號與開關函數對照Tab.1 Corresponding rules between trigger signal and switching function
當is大小接近于0時,電感續流作用可被忽略,此時開關器件通斷情況受交流側電壓以及直流側電壓影響。定義閾值δ,當時,不再以is正負來判斷開關函數取值,類似地,列舉出不同電壓條件下的開關函數的值,文中不再給出。實際情況中,δ 取值視系統功率等級和模型計算步長不同而變化,功率等級越大或計算步長越大,對應δ 取值越大,此處取0.5Α。
若采用C語言實現,為得到不同情況下開關函數取值,需要加入一系列條件判斷語句。而對FPGA來說,實現條件判斷效率并不高,需要耗費較多的硬件資源。
電流方向、電壓正負和電壓間大小比較都可化為二進制 01變量,IGBT的觸發脈沖也用01變量表示。而FPGA恰好善于組合邏輯運算,因此,本文考慮用邏輯表達式來表示 Sra和 Srb,并利用卡諾圖化簡邏輯函數得

式中,Zis、sgnis和sgnus分別對應電感電流過0判斷、電感電流方向和網側電壓正負三個邏輯變量。

此外,當電感不具備續流作用時,整流器還存在一種特殊的工作情況。例如:當 udc>us>0、|is|<δ 時,Tr2=Tr3=0,Tr1、Tr4不同為1。此時,由于Tr1、Tr4并沒有同時接收導通觸發脈沖,對于is來講,只存在順時針導通的回路(流經二極管),而不存在逆時針導通的回路(流經IGBT),并且由于udc>us,二極管承受反向壓降,無法導通。在FPGA實現過程中,驅動is寄存器的復位信號使之為0。
對于逆變器,由于電機的定子繞組也呈感性,同樣具有續流作用。定義電機電流方向邏輯變量為

式中,k可取u,v和w。
電機與中間直流環節不同,不存在電容維持電機側電壓,因此不必考慮電機電流過0點時的橋臂導通情況。
同樣,利用卡諾圖對其進行化簡得到邏輯函數

為保證模型求解速度,模型中變量、參數統一以定點數參與運算,表2中給出了牽引變流器模型中變量定點數表示。以交流電壓 us的定點數精度16.8為例,用16個二進制位表示電壓的整數部分,8個二進制位表示電壓的小數部分。

表2 牽引變流器變量定點數表示Tab.2 Fix-point format of variables in traction converter
本文中,采用了梯形公式對狀態方程進行積分計算。由于將模型集成在FPGA中,使得模型求解步長大幅度縮短,梯形公式積分已經可以滿足較高的仿真準確度。
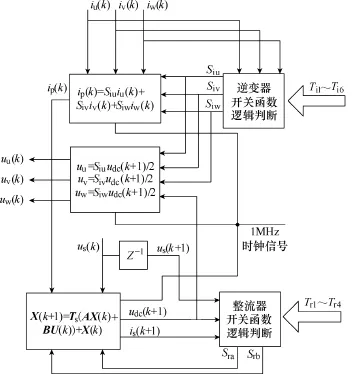
圖4 牽引變流器模型離散化框圖Fig.4 The block diagram of discretization modeling of a traction converter
圖4中給出了變流器模型的離散化具體實現框圖,其中,Ts為 FPGA模型仿真步長,為1μs。由于模型中,式(3)相對較為復雜,用狀態方程一般形式進行表示。
最后,FPGA實現過程中也考慮了短路故障情況,當監測到整流器或逆變器上下橋臂同時接收到導通信號時,模型會向上位機發送短路報警信號。
3 異步電機建模
電力牽引傳動系統通常選取三相異步電機,將電能轉化為機械能,為列車提供行駛動力。三相異步電機本身是一個高階非線性的多變量系統,本文采用靜止αβ坐標系下異步電機模型對其建模。
3.1牽引異步電機模型
首先,將牽引變流器的輸出三相電壓uu、uv和uw采用矢量合成方式,轉換為兩相靜止αβ坐標系下的電壓uαs、uβs為

因此,在兩相靜止坐標系下,異步電機的狀態方程模型如式(9)~式(13)所示。

式中,Rs為定子內阻;Rr為轉子內阻;Lm為互感;Ls為定子自感;Lr為轉子自感;ψαs、ψβs為定子磁鏈在α軸和β軸分量;ψαr、ψβr為轉子磁鏈在α軸和β軸分量;uαs、uβs為定子電壓在α軸和β軸分量;iαs、iβs為定子電壓在α軸和β軸分量;np為級對數;ωr為轉子電角速度;ωm為轉子機械角速度;J為轉動慣量;Te為電磁轉矩;TL為負載轉矩。
最后,將兩相靜止坐標系下的電流iαs、iβs轉換為三相交流電流iu、iv和iw,轉換公式為

式中,iu、iv、iw作為電機輸出,同時作為逆變器的輸入反饋回變流器模型。
3.2FPGA實現
在FPGA實現過程中,主要是對模型的離散化處理。圖5給出了異步電機模型的離散化具體實現框圖,Ts為FPGA模型仿真步長,為 1μs。由于式(9)相對較為復雜,用狀態方程一般形式X= AX+BU進行表示。

圖5 異步電機模型離散化框圖Fig.5 The block diagram of discretization modeling of an induction motor
在該模型中,四階狀態方程以轉子和定子磁鏈為狀態變量,描述電機電磁特性,一階狀態方程以轉子電角速度ωr為狀態變量,描述電機機械特性。由于轉速相對磁鏈來說是慢變量,ωr(k)與ωr(k+1)的角速度變化差值相對較小。因此,先由ωr(k)作為初值計算第k+1時刻轉子和定子磁鏈,再由磁鏈計算第k+1時刻Te和ωr。
表3給出了異步電機模型中變量定點數表示。

表3 異步電機變量定點數表示Tab.3 Fix-point format of variables in an induction motor
表4給出了模型各部分調用基本運算模塊的數量。加法運算、移位和多路選擇均可以在一個時鐘周期完成,乘法運算相對復雜,采用流水線乘法器加以實現,對于一個N位數乘法器需要INT(log2N)級加法實現。模型中的乘數均不超過32位,考慮到移位及其他操作的時間,乘法運算耗時共6個時鐘周期。FPGA芯片時鐘頻率為 100MHz,乘法運算時間為60ns,其他運算操作則需10ns,對表4各部分求和,共 750ns。此外,模型中需對關鍵變量添加寄存器,保證數值穩定,通過控制器脈沖計算得到變流器開關函數,亦需要計算時間。故考慮時間裕量將 100個 FPGA時鐘周期設為仿真步長,即1μs,各計算模塊受1MHz的信號觸發,信號占空比為1%,保證了每1μs系統完成一次完整運算。

表4 模型各部分運算模塊使用數量Tab.4 Numbers of operation modules of each part in this model
本文采用了Xilinx公司的System Generator系統級工具箱對整個電力牽引傳動系統模型進行實現。該工具箱提供了圖形化的設計界面,并且提供了Matlab/Simulink的接口。
4 HIL仿真驗證
4.1HIL仿真平臺框架
圖6a和圖6b分別給出了HIL仿真平臺的框架結構示意圖和實物圖。上位機與RT-LAB仿真器通過以太網線通信,上位機可觀測模型中的變量,并可配置模型參數。RT-LAB實時仿真器包含兩個運算單元:CPU為Intel Core-i7處理器,FPGA為Xilinx Virtex-6芯片。CPU將配置信號通過PCI-E總線發送給FPGA,并接收來自FPGA的待觀測量。FPGA還負責與數字、模擬板卡通信的工作,模型中的電流、電壓、轉速和轉矩等信號經過模擬板卡OP5330輸出。其中電壓、電流信號發送給 DSP的模-數模塊。電機的轉速信號,經過正交編碼脈沖(Quadrature Encoder Pulse,QEP)電路,通過OP5354數字輸出板卡發送至DSP的QEP模塊,FPGA通過數字輸入板卡OP5353,接收來自DSP的PWM信號,控制模型中虛擬的整流器和逆變器。值得一提的是,OP5353、OP5354和 OP5330中的所有信號都可以在RT-LAB仿真器I/O面板通過示波器進行觀測。牽引控制單元(TCU)由TI公司TMS320F2812為核心的器件構成。

圖6 電力牽引傳動系統HIL仿真平臺Fig.6 The block diagram and photo of hardware-in-the-loop simulation platform for electrical traction drive systems
4.2測試結果
為了驗證所建模型的正確性和適用性,基于圖6所示的HIL仿真平臺,對電力牽引傳動的FPGA模型進行測試。具體系統參數配置見表 5。其中,逆變器要同時驅動四臺異步電機,脈沖整流器系統控制算法采用瞬態電流控制,調制算法采用SPWM。逆變器電機系統控制算法采用轉子磁場定向間接矢量控制,調制算法采用 SVPWM,低速區為異步調制,中高速區為分段同步調制。

表5 電力牽引傳動系統HIL仿真參數Tab.5 The HIL simulation parameters of an electrical drive system
圖7所示為單相整流器模型工作在不控整流狀態時網側電壓、電流仿真波形。以網側電壓 us>0時為例說明:t<t1時,udc>us,二極管反向阻斷,整流器 a、b兩橋臂均未導通,is=0;t1<t<t2時,udc<us,二極管VDr1、VDr4正向導通,整流器a橋上橋臂和b橋下橋臂導通,Ls正向充電,is增大;t2時刻,udc=us,is增至最大值,由于Ls續流作用,維持 VDr1、VDr4導通;t2<t<t3時,udc>us,Ls持續放電,is減小;t3時刻,is減小為0,a、b兩橋臂變為關斷狀態。
圖8給出整流器在瞬態電流控制下,電壓與電流波形。由圖8可知,網側電流is正弦度高,與交流電壓us同頻同相位,整流器工作在單位功率因數下。ip為直流側輸出電流。

圖7 不控整流網側電壓與電流仿真波形Fig.7 Simulation waveforms of the main voltage and the line current in diode-rectification mode

圖8 瞬態電流控制下整流器網側和直流側電壓與電流波形Fig.8 Simulation waveforms voltage and current of AC side and DC side of rectifiers with transient current control

圖9 異步電機矢量控制全過程的定子電流、轉速、直流側電流和轉矩仿真波形Fig.9 Simulation waveforms of stator current, speed, DC-link current and torque of the asynchronous motor with vector control in the whole operations process
圖9給出了異步電機起動運行全過程的定子電流、轉矩、直流側電流和轉矩波形,其中給定轉子磁鏈ψs*=5Wb。t1時刻,給定轉速ωm*=200rad/s,電機帶載起動,輸出轉矩給定值 Te=3 000N·m,負載轉矩 TL=1 500N·m,電機勻加速起動,相電流 iu起動時電流幅值保持不變,頻率增大,電機輸入電流ip線性增加,能量由直流側傳導至電機側。t2時刻,電機達給定轉速,輸出轉矩Te=TL=1 500N·m。t3時刻,給定轉速改變為ωm*=?50rad/s,輸出轉矩給定值Te=?2 000N·m,ωm勻減速變化,ip突變為負值并呈上升趨勢變化。t4時刻,ωm達給定轉速,電機反轉,能量由電機側反饋回直流環節,ip由正變為負并保持相對穩定。t5時刻,TL變為0,Te迅速變為0,電機轉差也變為0,電機轉速有略微上升。
在電力牽引傳動系統中,受變流器體積及散熱器散熱能力限制,除異步調制外,往往在較高頻率范圍,引入分段同步調制、方波控制,在保證不超過發熱量限制值的前提下,降低電流諧波含量、抑制轉矩脈動。
圖10中給出了不同調制模式下,各過程的牽引電機三相電流波形。調制模式切換時,三相定子電流過渡平穩,證明了FPGA電機模型在各種調制模式下都能正確穩定工作。

圖10 不同調制模式過程中三相定子電流波形Fig.10 Simulation waveforms of three-phase stator current under different module modes
圖11對比不同實時仿真中CPU模型和FPGA模型整流器交流側電流的變化情況,說明FPGA模型運算速度上的優勢。圖11a中,CPU模型運算步長為20μs,電流is呈階梯狀變化。對于開關信號Tr3、Tr4的窄脈沖,由于模型計算的延遲,is并未對其作出響應,繼續增大。圖11b中,FPGA模型運算步長為1 μs,電流連續性更高。對于開關信號Tr3、Tr4的窄脈沖,is立即響應變化。FPGA模型相對于傳統CPU模型提高了仿真計算速度。

圖11 電力牽引傳動系統的CPU模型與FPGA模型對比Fig.11 The comparison between CPU model and FPGA model of an electrical traction drive system
5 結論
本文以提升電力牽引傳動系統實時仿真速度為目標,分析了系統的結構和原理,推導了開關邏輯函數,充分考慮了變流器過零點換流情況,并采用狀態方程對牽引傳動系統中的變流器及異步電機進行建模。通過System Generator工具將模型集成在FPGA芯片中,由于其高速并行的計算特性,實時仿真步長僅為1μs,相較于基于CPU的實時仿真,速度提高了一個數量級,避免了復雜的時間補償算法。實驗證明模型的正確性、可靠性。1μs的實時仿真步長提高了HIL仿真動態性能和仿真準確度,降低了計算帶來的延遲。
本文對電力牽引傳動系統的建模方法具有普遍性。本文所構建的模型包含了電阻、電感和電容等構成電路的基本元件,單相及三相變換器,以及非線性的異步電機模型。建模思路和方法具有一定的借鑒和推廣價值。
[1] Pak L F, Faruque M O, Nie X, et al. A versatile cluster-based real-time digital simulator for power engineering research[J]. IEEE Transactions on Power Systems, 2006, 21(2): 455-465.
[2] 何舜, 張建文, 蔡旭. 風電變流器的 RT-LAB硬件在環仿真系統設計與實現[J]. 電力系統保護與控制, 2013, 41(23): 43-48. He Shun, Zhang Jianwen, Cai Xu. Realization and design of wind power converter model based on RT-LAB HIL system[J]. Power System Protection and Control, 2013, 41(23): 43-48.
[3] 李秋碩, 張劍, 肖湘寧, 等. 基于 RTDS 的機電電磁暫態混合實時仿真及其在 FACTS中的應用[J].電工技術學報, 2012, 27(3): 219-226. Li Qiushuo, Zhang Jian, Xiao Xiangning, et al. Electromechanical-electromagnetic transient realtime simulation based on RTDS and its application to FACTS[J]. Transactions of China Electrotechnical Society, 2012, 27(3): 219-226.
[4] 丁榮軍, 桂衛華, 陳高華. 電力機車交流傳動系統的半實物實時仿真[J]. 中國鐵道科學, 2008, 29(4): 96-102. Ding Rongjun, Gui Weihua, Chen Gaohua. HIL realtime simulation of electric locomotive AC drive system[J]. China Railway Science, 2008, 29(4): 96-102.
[5] 葛興來, 宋文勝, 馮曉云. 基于 dSPACE的高速列車牽引傳動系統[J]. 電力自動化設備, 2012, 32(3): 18-22. Ge Xinglai, Song Wensheng, Feng Xiaoyun. Drive system based on dSPACE platform for high-speed train[J]. Electric Power Automation Equipment, 2012, 32(3): 18-22.
[6] Jin H. Behavior-mode simulation of power electronic circuits[J]. IEEE Transactions on Power Electronics, 1997, 12(3): 443-452.
[7] Kuffel P, Kent K, Irwin G. The implementation and effectiveness of linear interpolation within digital simulation[J]. International Journal of Electrical Power & Energy Systems, 1997, 19(4): 221-227.
[8] 郭希錚, 游小杰, 徐從謙, 等. 大功率電力牽引控制系統硬件在回路實時仿真[J]. 電工技術學報, 2012, 27(4): 65-70.Guo Xizheng, You Xiaojie, Xu Congqian, et al. Simulation of hardware in loop for high-power electrical traction system[J]. Transactions of China Electrotechnical Society, 2012, 27(4): 65-70.
[9] 邱大強, 李群湛, 舒澤亮, 等. 基于 FPGA 的綜合潮流控制器的設計與實現[J]. 電力系統保護與控制, 2010, 38(24): 163-167. Qiu Daqiang, Li Qunzhan, Shu Zeliang, et al. Design and realization of integrated power flow controller based on FPGA[J]. Power System Protection and Control, 2010, 38(24): 163-167.
[10] 羅德榮, 王耀南, 葛照強, 等. 級聯型高壓變頻器控制算法的研究及實現[J]. 電工技術學報, 2010, 25(1): 104-110. Luo Derong, Wang Yaonan, Ge Zhaoqiang, et al. Research and realization of control algorithm of cascaded high voltage converter[J]. Transactions of China Electrotechnical Society, 2010, 25(1): 104-來110.
[11] 趙耀, 趙庚申, 郭天勇, 等. 基于 SVPWM 低諧波死區算法的研究及應用[J]. 電力系統保護與控制, 2012, 40(8): 57-62. Zhao Yao, Zhao Gengshen, Guo Tianyong, et al. Research and application of low harmonics dead-time injection based on SVPWM[J]. Power System Protection and Control, 2012, 40(8): 57-62.
[12] 傅成駿. 軌道交通車輛交流傳動系統硬件在回路仿真技術進展[J]. 機車電傳動, 2009(3): 1-4. Fu Chengjun. Development of hardware-in-loop simulation technology for AC drive systems in rail vehicles[J]. Electric Drive for Locomotives, 2009(3): 1-4.
[13] 馬曉軍, 楊宗民, 劉春光, 等. 電力電子器件的實時仿真[J]. 電力系統自動化, 2013, 37(18): 108-112. Ma Xiaojun, Yang Zongmin, Liu Chunguang, et al. Real-time simulation of power electronic devices[J]. Automation of Electric Power Systems, 2013, 37(18): 108-112.
[14] Parma G G, Dinavahi V. Real-time digital hardware simulation of power electronics and drives[J]. IEEE Transactions on Power Delivery, 2007, 22(2): 1235-1246.
[15] 馮曉云. 電力牽引交流傳動及其控制系統[M]. 北京: 高等教育出版社, 2009.
[16] 宋文勝, 馮曉云, 侯黎明, 等. 電力牽引傳動系統的三電平直接轉矩控制算法的半實物實驗研究[J].電工技術學報, 2012, 27(2): 165-172. Song Wensheng, Feng Xiaoyun, Hou Liming, et al. Hardware-in-loop research of three-level direct torque control scheme for electric traction drive system[J]. Transactions of China Electrotechnical Society, 2012, 27(2): 165-172.
Microsecond Hardware-in-the-Loop Real-Time Simulation of Electrical Traction Drive System
Hao Qi Ge Xinglai Song Wensheng Feng Xiaoyun
(School of Electrical Engineering Southwest Jiaotong University Chengdu 610031 China)
The structure and principle of electric traction drive system are analyzed, and a field-programmable gate array (FPGA) model is built for hardware-in-the-loop (HIL) simulation, to meet the demand of real-time high speed simulation. This model consists of a single-phase rectifier, the DC-link circuit, a three-phase two-level inverter and asynchronous motors. For the inverter and rectifier which include switching devices, logical expression functions are derived under different switching states. State equations and matrix equations are applied in modeling converters and asynchronous motors respectively. In addition, the mathematical model is integrated into the FPGA chip. The test on HIL simulation in the RT-LAB real-time simulator has verified this FPGA model. As a result, the simulation step decreases sharply, breaking the speed limit of general-purpose processor. The real-time HIL simulation method at microsecond level improves the response speed and accuracy of the electrical traction drive system modeling.
Field-programmable gate array, microsecond, hard-in-the-loop, electric traction drive system, real-time simulation, AC-DC-AC
郝 琦 男,1991年生,碩士研究生,研究方向為電力牽引交流傳動及其控制。
E-mail: curiouse@gmail.com
葛興來 男,1979年生,博士,副教授,研究方向為電力牽引系統控制及其故障檢測與診斷技術。
E-mail: xlgee@163.com(通信作者)
國家自然科學基金——高鐵聯合基金重點項目(U1134205)和國家自然科學基金(51207131、51277153)資助。
2014-02-21 改稿日期 2014-07-08
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
