GPS信號(hào)改正參數(shù)研究
2016-05-06 05:30:43王冬霞趙金賢胡彩波
測(cè)繪通報(bào) 2016年3期
關(guān)鍵詞:可行性
辛 潔,任 暉,王冬霞,趙金賢,胡彩波
(北京衛(wèi)星導(dǎo)航中心,北京 100094)
?
GPS信號(hào)改正參數(shù)研究
辛潔,任暉,王冬霞,趙金賢,胡彩波
(北京衛(wèi)星導(dǎo)航中心,北京 100094)
A Study on Correction Parameters of GPS Signal
XIN Jie,REN Hui,WANG Dongxia,ZHAO Jinxian,HU Caibo
摘要:精確的信號(hào)改正參數(shù)是提高導(dǎo)航定位精度的關(guān)鍵。為了對(duì)導(dǎo)航定位服務(wù)進(jìn)行有效的經(jīng)營(yíng),需要在每一個(gè)信號(hào)離開衛(wèi)星發(fā)播天線的時(shí)間內(nèi),考慮鐘差、通道延遲、碼相位位移、用戶鐘偏差,以及電離層、對(duì)流層等大氣因素的影響。通過對(duì)GPS導(dǎo)航電文結(jié)構(gòu)的研究,給出了單、雙頻用戶的鐘差改正參數(shù)、設(shè)備群延遲改正參數(shù)、電離層改正參數(shù)等參數(shù)算法,并在此基礎(chǔ)上給出了信號(hào)間改正參數(shù)(ISCs)的算法。最終結(jié)合改正參數(shù)的應(yīng)用范例,對(duì)改正參數(shù)應(yīng)用的可行性進(jìn)行了分析。
關(guān)鍵詞:改正參數(shù);導(dǎo)航定位精度;導(dǎo)航電文結(jié)構(gòu);信號(hào)間改正參數(shù);可行性
自1973年美國(guó)國(guó)防部正式批準(zhǔn)了以軍事目的而建設(shè)的全球定位系統(tǒng)(Global Position System,GPS)方案[1]以來,系統(tǒng)已進(jìn)行了大量的提升用戶服務(wù)性能及增加在線能力的現(xiàn)代化改造[2]。發(fā)射入軌的新一代衛(wèi)星有著更精準(zhǔn)的時(shí)鐘和更強(qiáng)的擴(kuò)展能力,能播發(fā)新增信號(hào)。地面控制網(wǎng)增加了終端跟蹤網(wǎng)絡(luò)密度,增強(qiáng)了播發(fā)給用戶的導(dǎo)航信息(navigation,NAV)中衛(wèi)星鐘和衛(wèi)星軌道預(yù)測(cè)的計(jì)算能力。GPS接收機(jī)的生產(chǎn)商通過探索空間信號(hào)(signal in space,SIS)特性,尋求解決顯著的地理空間問題途徑,研發(fā)更好的測(cè)量方法,并使得舊的解決方法更加健全。
對(duì)于民用用戶,GPS現(xiàn)代化最讓人興奮的方面在于新增加了3個(gè)定位服務(wù)信號(hào)[3]:L2C、L5和L1C(與L1C定位服務(wù)信號(hào)一樣,L5在同一載波上擁有2個(gè)獨(dú)立的定位服務(wù)信號(hào))。擁有新信號(hào)和傳統(tǒng)L1 C/A信號(hào)等多重信號(hào)的現(xiàn)代化衛(wèi)星能夠剔除由電離層路徑延遲造成的抗差雙頻或三頻測(cè)距誤差,并提供3種譜的獨(dú)立服務(wù)。如果出現(xiàn)射頻干擾(radio frequency interference,RFI)致使3個(gè)頻率中1個(gè)或2個(gè)不可用,剩余的頻率均可獨(dú)立使用。
為了對(duì)4個(gè)民用定位服務(wù)進(jìn)行有效的經(jīng)營(yíng),在每一個(gè)信號(hào)離開衛(wèi)星發(fā)播天線的時(shí)間內(nèi),需要考慮信號(hào)間偏差(inter-signal corrections,ISBs)的測(cè)距影響。同時(shí),為了簡(jiǎn)化接收機(jī)設(shè)置,不考慮接收機(jī)正在使用哪一個(gè)或組合信號(hào)/服務(wù),在播發(fā)屬于新L2C、L5和L1C定位服務(wù)信號(hào)的民用導(dǎo)航(civil navigation,CNAV)信息中加入內(nèi)部信號(hào)改正參數(shù)[4]。4個(gè)民用信號(hào)中的每一個(gè)都有一個(gè)以L1 P(Y)為參考碼的ISC參數(shù)。
一、改正參數(shù)算法
1. 鐘差改正參數(shù)
對(duì)雙頻用戶來說,廣播星歷子幀1發(fā)播的系數(shù)描述了發(fā)播參數(shù)時(shí)間間隔的偏差。該項(xiàng)改正用于計(jì)算衛(wèi)星鐘差偏差項(xiàng)、漂移和齡期,同時(shí),也用于計(jì)算群延遲偏差和平均群延遲差異的補(bǔ)充特性。但這些系數(shù)不包括相對(duì)論效應(yīng)改正,用戶設(shè)備還需要確定相對(duì)論改正。一般而言,改正信號(hào)接收時(shí)刻時(shí)間和天線相位中心的衛(wèi)星碼相位時(shí)間偏差(以GPS時(shí)間為基準(zhǔn))關(guān)系為
t=tSV+ΔtSV
(1)
(2)
式中,t表示GPS系統(tǒng)時(shí)間,若t-tOC大于302 400 s,從t中減去604 800 s;若t-tOC小于-302 400 s,則在t中加上604 800 s;tSV表示電文發(fā)射時(shí)刻有效的碼相位時(shí)間,當(dāng)由GPS時(shí)計(jì)算得到系數(shù)值時(shí),tSV的敏感性可忽略;ΔtSV表示衛(wèi)星PRN碼相位時(shí)間偏差;af0、af1、af2為多項(xiàng)式系數(shù);tOC表示鐘差參考時(shí)刻;Δtr表示相對(duì)論效應(yīng)改正項(xiàng)

(3)


(4)
在估計(jì)NAV參數(shù)時(shí),控制段將用下面的等價(jià)公式進(jìn)行相對(duì)論效益改正
(5)
式中,R是衛(wèi)星的瞬時(shí)位置向量;V是衛(wèi)星的瞬時(shí)速度向量;c是光速。此式不受地固旋轉(zhuǎn)坐標(biāo)系還是地心慣性坐標(biāo)系的限制。
2. 設(shè)備群延遲改正算法
改正項(xiàng)TGD起初用來計(jì)算L1 P(Y)和L2 P(Y)間的設(shè)備群延遲,主要用作基于合同商在衛(wèi)星制造時(shí)的測(cè)量。每個(gè)衛(wèi)星的TGD會(huì)不斷更新,以反映真實(shí)的在軌設(shè)備群延遲差異。該改正項(xiàng)主要是為單頻用戶考慮。
當(dāng)用戶僅使用L1 P(Y)進(jìn)行碼相位偏差改正時(shí),公式如下
(ΔtSV)L1P(Y)=ΔtSV-TGD
(6)
當(dāng)用戶僅使用L2 P(Y)進(jìn)行碼相位偏差改正時(shí),公式如下
(ΔtSV)L2P(Y)=ΔtSV-γ12TGD
(7)
將L1和L2的標(biāo)準(zhǔn)頻率記為fL1和fL2,得到
(8)
TGD不等于衛(wèi)星設(shè)備群延遲差異的均值,而是測(cè)量值,代表平均設(shè)備群延遲差異乘以1/(γ12-1),從而得到雙頻用戶的表達(dá)式TGD為
TGD=1/(γ12-1)((ΔtSV)L1P(Y)-(ΔtSV)L2P(Y))
(9)
3. 電離層改正算法
電離層延遲是導(dǎo)航定位系統(tǒng)不可忽略的主要誤差源[5-6]。由于電離層具有色散特性,不同頻率穿過電離層時(shí)產(chǎn)生的折射效應(yīng)不同[7-9],利用這個(gè)特性就可以估計(jì)電離層對(duì)衛(wèi)星導(dǎo)航信號(hào)傳輸引入的延遲量。
對(duì)于L1 P(Y) 和L2 P(Y),TGD與L2 P(Y) ISC成固定的倍數(shù)關(guān)系,即
ISCL2P=(1-γ12)TGD
(10)
通過將涉及L1P和L2P的式(1)和式(2)相減,再代入式(14)的比例關(guān)系,得到電離層改正評(píng)估方程為
(11)
從而得到電離層偏差
(12)
對(duì)于雙頻用戶來說,電離層效應(yīng)改正過的偽距方程為
(13)
式中,PR表示電離層效應(yīng)改正過的偽距;PRi表示i通道測(cè)得的偽距值。
若雙頻用戶需對(duì)有電離層引起的群延遲進(jìn)行改正,得到電離層與群延遲間的關(guān)系如下
(14)
雙頻用戶可通過時(shí)間延遲差對(duì)接收時(shí)刻進(jìn)行改正,對(duì)于單頻用戶可采用以下模型進(jìn)行改正,從而使由電離層傳播效應(yīng)造成的RMS誤差降低至少50%。如果在擴(kuò)展運(yùn)行階段或衛(wèi)星處于自主導(dǎo)航模式時(shí),GPS運(yùn)控系統(tǒng)(OCS)無法上傳數(shù)據(jù),則使用該模型將會(huì)產(chǎn)生不可預(yù)知的后果。電離層改正模型為
(15)

二、ISCs算法
偽距測(cè)量涉及自由空間距離、地面站接收機(jī)偏差、電離層、對(duì)流層、相關(guān)性、衛(wèi)星和地面鐘差,以及信號(hào)間改正等因素影響。這里僅給出L1P、L2P、L1CA、L2C和L5Q的偽距方程,其他信號(hào)方程類似。在各種操作中均不考慮流層、相關(guān)性、時(shí)鐘等影響因素,不將它們列入方程。以L1 P(Y)碼信號(hào)為例,所有內(nèi)部信號(hào)的偽距測(cè)量定義與L1P的關(guān)系如下
PRL1P=R+iono
(16)
PRL2P=R+γ12iono-ISCL2P+BL2P
(17)
PRL1CA=R+iono-ISCL1CA+BL1CA
(18)
PRL2C=R+γ12iono-ISCL2C+BL2C
(19)
PRL5Q=R+γ15iono-ISCL5Q+BL5Q
(20)
式中,PRi表示基于頻率i的偽距測(cè)量; R表示自由空間距離;iono表示電離層改正;Bi表示地面站頻率i與L1P的偏差;ISCi表示頻率L1P和頻率i間的信號(hào)間改正;γij表示頻率i和頻率j的平方比。
1.L1C/A的ISC
通過將涉及L1P和L1C/A的式(1)和式(3)相減,得到L1C/A的信號(hào)間改正評(píng)估方程為
ISCL1CA=PRL1P-PRL1CA+BL1CA
(21)
2.L2C的ISC
通過將涉及L2P和L2C的式(2)和式(4)相減,得到L2C信號(hào)間改正評(píng)估方程為
PRL2P-PRL2C=ISCL2C-ISCL2P-(BL2C-BL2P)
(22)
又由TGD與L2P(Y)ISC成固定的倍數(shù)關(guān)系得到
(23)
3.L5Q的ISC

(24)
三、改正參數(shù)的應(yīng)用
對(duì)于用戶接收機(jī)來說,典型的改正參數(shù)應(yīng)用如圖1所示。接收機(jī)基于衛(wèi)星播發(fā)時(shí)間估計(jì),得到鐘差改正多項(xiàng)式、對(duì)流層模型及電離層模型后,再結(jié)合碼相位位移、通道延遲、GPS時(shí)間、用戶鐘偏差等參數(shù)值后,進(jìn)行過濾和坐標(biāo)轉(zhuǎn)換,從而得到用戶位置、速度和時(shí)間。其中,ERD表示導(dǎo)航電文改正表(NMCT)中的偽距估計(jì)誤差。每個(gè)ERD值由地面站計(jì)數(shù),代表衛(wèi)星星歷誤差減去光速和衛(wèi)星鐘差乘積的徑向分量。衛(wèi)星星歷及鐘差通過當(dāng)前估值減去廣播值得到。因此,ERD值可以用于改正用戶觀測(cè)偽距。
PRc=PR-ERD
(25)
式中,PRc表示經(jīng)NMCT中的ERD值改正過的偽距。
美國(guó)研制的廣域增強(qiáng)系統(tǒng)(wideareaaugmentsystem,WAAS)已成功利用經(jīng)驗(yàn)?zāi)P秃陀^測(cè)數(shù)據(jù)實(shí)現(xiàn)GPS星歷改正數(shù)、鐘差改正數(shù)和電離層延遲改正數(shù)的分離和計(jì)算,并通過地球同步軌道衛(wèi)星(geostationaryearthorbit,GEO)將改正數(shù)和GPS星座的完好性狀況向覆蓋區(qū)廣播。
2013年6月,ISCs首次作為在軌導(dǎo)航電文信息的一部分播發(fā),標(biāo)志著ISCs參數(shù)評(píng)估進(jìn)入在軌試驗(yàn)階段。根據(jù)美國(guó)全球定位系統(tǒng)現(xiàn)代化民用導(dǎo)航信號(hào)(CNAV)現(xiàn)場(chǎng)直播測(cè)試計(jì)劃,在軌衛(wèi)星播發(fā)的部分ISC值[10]見表1。
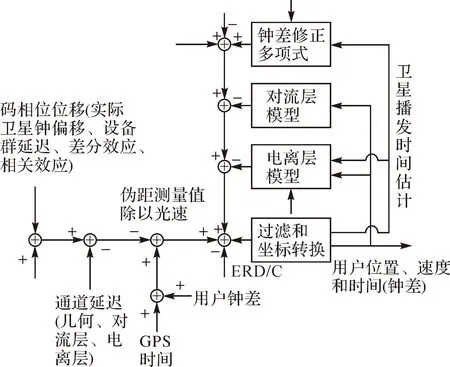
圖1 改正參數(shù)的應(yīng)用范例
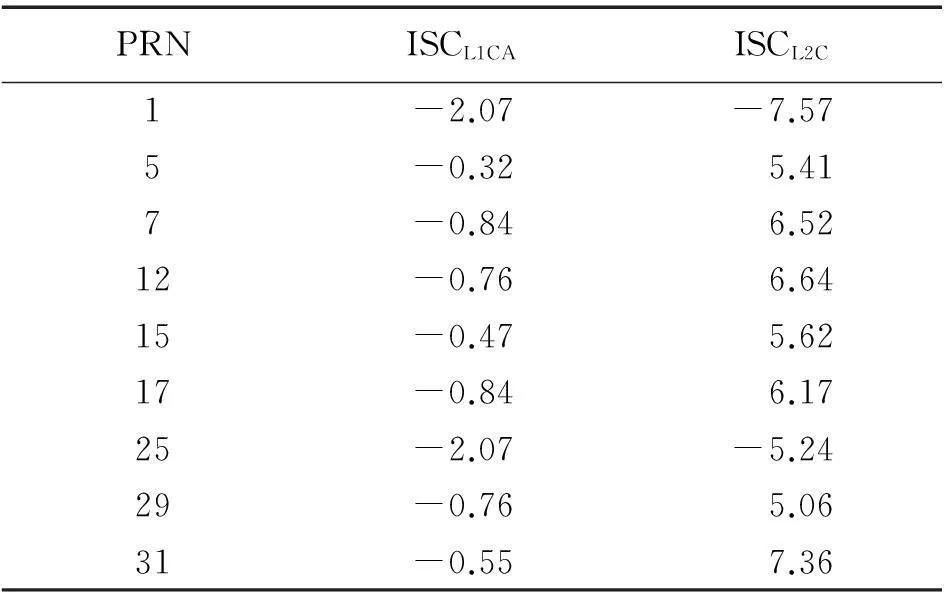
ns
目前在軌播發(fā)的ISC值還存在欠缺,其主要原因之一在于包含未標(biāo)校的監(jiān)測(cè)站偏差,監(jiān)測(cè)站偏差通常有零點(diǎn)幾納秒的偏差;同時(shí),在軌觀測(cè)ISC值僅源于單監(jiān)測(cè)站的觀測(cè),存在不可預(yù)知的偏差。
四、結(jié)束語
本文基于對(duì)GPS導(dǎo)航電文結(jié)構(gòu)的研究,給出了單雙頻用戶的鐘差改正參數(shù)、設(shè)備群延遲改正參數(shù)、電離層改正參數(shù)等參數(shù)算法,并在此基礎(chǔ)上給出了以L1 P(Y)為參考碼的L2P、L1CA、L2C和L5Q間的ISC參數(shù)算法,最后結(jié)合監(jiān)測(cè)接收機(jī)應(yīng)用改正參數(shù)及ISCs在軌播發(fā)實(shí)例,對(duì)改正參數(shù)的可行性進(jìn)行了初步分析。
近幾次局部戰(zhàn)爭(zhēng)表明,美軍所具備的“導(dǎo)航優(yōu)勢(shì)”是其在戰(zhàn)爭(zhēng)中占有絕對(duì)作戰(zhàn)優(yōu)勢(shì)的關(guān)鍵因素,發(fā)展衛(wèi)星導(dǎo)航系統(tǒng)及開展導(dǎo)航定位技術(shù)的應(yīng)用研究究已成為各國(guó)關(guān)注的焦點(diǎn)。面對(duì)新的國(guó)際形勢(shì),注重跟蹤研究國(guó)外衛(wèi)星導(dǎo)航系統(tǒng)及其軍事應(yīng)用技術(shù)的動(dòng)向,發(fā)展我國(guó)獨(dú)立、高效、穩(wěn)定安全的衛(wèi)星導(dǎo)航導(dǎo)航系統(tǒng),不斷提高我國(guó)衛(wèi)星導(dǎo)航技術(shù)的應(yīng)用水平,有著十分重要的意義。
參考文獻(xiàn):
[1]PARKINSON B. Global Positioning System: Theory and Applications, Vols I and II[R]. Washington DC:American Institute of Aeronautics and Astronautics, Inc,1996:19-24.
[2]朱筱虹, 李喜來, 楊元喜. 從國(guó)際衛(wèi)星導(dǎo)航系統(tǒng)發(fā)展讀加速中國(guó)北斗衛(wèi)星導(dǎo)航系統(tǒng)建設(shè)[J]. 測(cè)繪通報(bào), 2011 (8): 1-4.
[3]陳俊勇. 構(gòu)建全球?qū)Ш叫l(wèi)星中國(guó)國(guó)家級(jí)連續(xù)運(yùn)行站網(wǎng)[J]. 測(cè)繪通報(bào), 2009 (9): 1-3.
[4]MICHAEL J. Global Positioning System Directorate Systems Engineering & Integration Interface Specification IS-GPS-200 Navstar GPS Space Segment/Navigation User Segment Interfaces[EB/OL]. (2011-09-21)[2015-04-25]. http:∥www.gps.gov/technical/icwg/IS-GSP-200F.pdf.
[5]李征航,黃勁松.GPS測(cè)量與數(shù)據(jù)處理[M].武漢:武漢大學(xué)出版社, 2005: 96-99.
[6]焦明連, 蔣廷臣, 王秀萍. 基于GNSS電離層模型研究進(jìn)展[J]. 測(cè)繪科學(xué), 2008, 33(5): 91-93.
[7]王明誠(chéng),馬煦,翟穩(wěn)科. 提高增強(qiáng)系統(tǒng)電離層延遲改正數(shù)估計(jì)的方法研究[J].全球定位系統(tǒng),2006 (6):10-14.
[8]WU Xiaoli, HU Xiaogong, WANG Gang, et al. Evaluation of COMPASS Ionosphere Model in GNSS Positioning[J]. Advances in Space Research, 2013, 51(6):959-968.
[9]張偉, 邱衛(wèi)寧, 暢鑫. 基于球諧函數(shù)模型的GPS差分碼延遲估計(jì)[J]. 測(cè)繪通報(bào), 2013(6): 19-21.
[10]FEESS W, COX J, HOWARD E, et al. GPS Inter-Signal Corrections (ISCs) Study[C]∥Proceedings of the 26th International Technical Meeting of the ION Satellite Division, ION GNSS+2013. Nashville: The Institute of Navigation, 2013: 1244-1248.
中圖分類號(hào):P228
文獻(xiàn)標(biāo)識(shí)碼:B
文章編號(hào):0494-0911(2016)03-0022-03
作者簡(jiǎn)介:辛潔(1988—),女,碩士,工程師,主要研究衛(wèi)星導(dǎo)航定位系統(tǒng)。E-mail:15810539683@139.com
收稿日期:2015-02-10; 修回日期: 2015-11-03
引文格式: 辛潔,任暉,王冬霞,等. GPS信號(hào)改正參數(shù)研究[J].測(cè)繪通報(bào),2016(3):22-24.DOI:10.13474/j.cnki.11-2246.2016.0077.
猜你喜歡
現(xiàn)代儀器與醫(yī)療(2022年3期)2022-08-12 09:04:04
昆明醫(yī)科大學(xué)學(xué)報(bào)(2022年3期)2022-04-19 13:59:52
文化創(chuàng)新比較研究(2020年8期)2021-01-22 00:38:08
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:38
中國(guó)航海(2019年2期)2019-07-24 08:26:40
江西建材(2018年1期)2018-04-04 05:25:54
武大國(guó)際法評(píng)論(2017年1期)2018-01-23 03:23:23
中國(guó)交通信息化(2017年3期)2017-06-08 06:09:22
學(xué)習(xí)月刊(2015年10期)2015-07-09 03:35:08
中國(guó)工程咨詢(2015年5期)2015-02-16 05:35:18