水下航行體降噪艉翼填角的數值模擬與試驗研究
2016-05-03 01:25:24李孟捷王夢璇劉志華
船舶力學 2016年10期
李孟捷,王夢璇,王 力,劉志華
(1.宜昌測試技術研究所,湖北宜昌443003;2.海軍工程大學艦船工程系,武漢430033)
水下航行體降噪艉翼填角的數值模擬與試驗研究
李孟捷1,王夢璇1,王 力1,劉志華2
(1.宜昌測試技術研究所,湖北宜昌443003;2.海軍工程大學艦船工程系,武漢430033)
為降低水下航行體噪聲,研究了艉翼填角的降噪效果。分析了水下航行體艉翼接合部馬蹄渦影響螺旋槳伴流場的特征,認為馬蹄渦對水下航行體噪聲產生了不利影響。針對某無人水下航行體(UUV)設計了一種艉翼填角,運用CFD方法對該艉翼填角優化螺旋槳伴流場的效果進行了數值模擬,結果顯示伴流場軸向速度的周向不均勻度系數下降35%-62%。將艉翼填角應用于該UUV,開展航行輻射噪聲測量試驗,結果顯示艉翼填角使UUV航行噪聲總聲源級降低3.4 dB,尤其對低頻噪聲抑制較好。
水下航行體;馬蹄渦;降噪;艉翼填角;CFD;噪聲測量
0 引 言
水下航行體最大的軍事價值源于其具有隱蔽航行能力,靜音性能是衡量其總體性能先進程度的重要指標。因此,研制低噪聲水下航行體是各國海軍追求的目標。對于航行體水下輻射噪聲而言,螺旋槳噪聲和動力系統產生的機械噪聲是兩種最重要的噪聲來源[1],降低螺旋槳噪聲以及螺旋槳激振力誘發的機械結構噪聲就顯得尤為重要。
由于水下航行體附體及操縱面對其繞流場的干擾,位于艉部的螺旋槳工作的伴流場是十分不均勻的。螺旋槳在這種不均勻的伴流場中作周期性的旋轉運動,槳葉與水流發生著復雜的、非定常的力學相互作用,這種相互作用同時造成了槳葉和水介質的受力變化,引起了結構振動、漩渦發放、空泡產生與潰滅等一系列發聲效應。因此,如何削弱這種相互作用的脈動峰值成為了降低螺旋槳激勵噪聲的關鍵。除了針對螺旋槳采取措施(增大側斜、增加葉數等)使其適應這種不均勻工作流場外,改善螺旋槳的工作環境,降低螺旋槳伴流場的周向不均勻程度無疑也是一種行之有效的手段。
水下航行體主/附體接合部位的流場是一個強三維非定常流動,往往伴有一個或多個馬蹄渦的形成和發展,復雜的分離流動結構及向下游的發展,使接合部流動成為影響螺旋槳伴流場不均勻程度的重要源泉[2]。近三十年來,人們研究了水下航行體主艇體與附體接合部位形成的馬蹄渦對艉部伴流場不均勻度的影響,提出了一些抑制馬蹄渦的艉流控制方法和裝置,以提高水下航行體的靜音性能。
1985年,Kubendran研究表明減小附體迎流段端部直徑可減弱其下游馬蹄渦的強度。1989年,Davenport和Dewitz[3]研究表明合適的填角能明顯地抑制馬蹄渦的強度和尺度;1991年,王錫良[4],李定和周連第[5]等首先在我國開展主/附體交接部流場及不同連接形式對流場影響的研究,解釋了接合部處產生低頻振蕩馬蹄渦的機理,試驗結果表明弓形不對稱連接方式最佳;2001年,張軍[6]、趙峰[2]、李新汶[7]等利用CFD計算和拖曳水池環境下的大型PIV測試方法,對水下航行體幾種細部變化的艉附體與主回轉體連接形式的設計模型進行了艉部區域流場定量測試分析,比較幾種交接形式,認為采用艉翼前緣向前伸長的長鼻子方案,艉部流場均勻度較高。
1965年,Burstein[8]對采用主動的流動控制手段—噴流,進行了一定的探索性的試驗研究。2007年,張楠,沈泓萃,姚惠之[9]在此基礎上開展了潛艇噴流技術研究,采用數值計算方法,模擬了潛艇模型在指揮臺圍殼開孔噴流后的流場和水動力,其結果表明潛艇噴流可使伴流場不均勻度系數降低10%-60%。
2001年,美國的Batcho[10]發明了一種消除流體中物體交接部處所產生馬蹄渦的附體裝置,其方法是在交接部流動區域中設置升翼面,利用翼面兩端梢渦產生與馬蹄渦旋轉方向相反的渦流,從而起到抵消馬蹄渦的作用。
2010年,劉志華和熊鷹[11]提出了消渦整流片的技術設想,通過在潛艇指揮臺圍殼兩側馬蹄渦生成與發展演化的區域設置長方形薄片來破壞馬蹄渦的產生并抑制馬蹄渦的發展,從而降低潛艇槳盤面處伴流場不均勻程度。開展了風洞中的潛艇模型艉部伴流場測量試驗,結果顯示整流片能夠使潛艇槳盤面伴流不均勻度下降30%-50%。
本文分析了主艇體與附體結合部位馬蹄渦影響螺旋槳伴流場的特征,針對某水下航行體模型設計了一種艉翼填角形式,利用CFD方法對該航行體流場進行了數值模擬計算,得出了艉翼填角優化伴流場的效果。通過航行輻射噪聲測量試驗,對艉翼填角的降噪效果進行了驗證。
1 馬蹄渦對螺旋槳伴流場的影響
馬蹄渦結構是水下航行體流場重要的精細流場結構,馬蹄渦在發展過程中對水下航行體流場產生著重要的影響。典型的潛艇外形如圖1所示,其指揮臺圍殼、艉翼與主艇體結合部位的角區流動形態復雜,是馬蹄渦的發源地。通過對角區流場的研究,顯示了馬蹄渦產生、發展的形式和過程。圖2-1為方形凸臺/平板角區對稱面的馬蹄渦核PIV流場顯示圖,圖2-2為方形凸臺/平板模型橫向剖面馬蹄渦系結構顯示圖。
研究表明,由于平板上的形狀突變,上游流場邊界層的分離渦量不斷在角區累積[12],產生了強烈的馬蹄渦核。當流線進一步發展,空間馬蹄渦軸隨之伸展,演變為縱向渦,持續將渦量輸運至下游,形成馬蹄渦系,甚至在下游發生脫落,對下游流場形成顯著的擾動。
同樣,在指揮臺圍殼、艉翼與主艇體的結合部位,由于形狀突變以及艇體收縮,帶來了極大的逆壓梯度,流場中會發生明顯的流動分離并產生大強度的漩渦流動,形成馬蹄渦核。由海姆霍茲定理可知,漩渦會誘導周圍流場形成大強度的渦管,該渦管根據流線形狀發展,向縱向發生偏轉,產生縱向渦。又因為附體兩側的“肩部”會加速流體流動,使得縱向渦被進一步拉伸,形成強度大、影響范圍廣的馬蹄渦系,不僅進一步導致了三維流動分離,而且縱向渦沿主艇體表面向下游傳播,還會劇烈影響著后方的流場形態。

圖1 潛艇外形示意圖Fig.1 A submarine

圖2-1 馬蹄渦核顯示圖-側視圖Fig.2-1 Visualization of horseshoe vortex core-side view
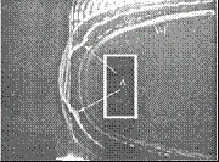
圖2-2 馬蹄渦系結構顯示圖-俯視圖Fig.2-2 Visualization of horseshoe vortex system-top view
三維流動分離如圖3所示,艇體表面流動到達附體前端受到阻礙,在圍殼中縱對稱面上的分離點S發生流動分離,來自圍殼兩側分離區的分離流與前方的主流在分離點T匯合,匯合流在馬蹄渦的作用下發生彎曲、離開壁面并產生縱向渦ωx。該縱向渦沿艇體向下游傳播,將給螺旋槳盤面處的流場帶來極大的影響。
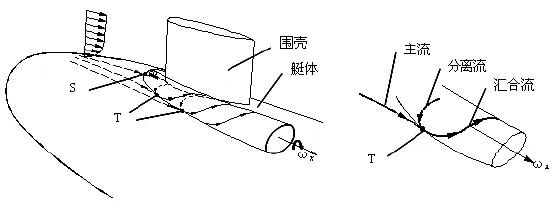
圖3 三維流動分離示意圖Fig.3 Three-dimensional flow separation
圖4為Huang[13]測量的全附體SUBOFF潛艇模型槳盤面處軸向速度等值線分布圖,它是表征航行體螺旋槳進流條件的主要特征量,與航行體螺旋槳的振動噪聲及水動力性能直接相關。
圖4表明影響該潛艇槳盤面軸向伴流等值線的因素:①主艇體艉部粘性邊界層使得流場軸向速度值沿徑向由內到外逐漸增大;②a指揮臺圍殼的粘性艉流使得槳盤面上對應位置處流體速度減小;②b艉翼的粘性艉流使得槳盤面上對應位置處流體速度減小,粘性尾流的影響在圖4中表現為外層伴流等值線的尖峰,尖峰區域內的流體速度小于尖峰區域外的流體速度;③a指揮臺圍殼和主艇體交接部位馬蹄渦對流場的干擾,這種干擾作用表現為槳盤面上對應位置處的伴流等值線向內發生彎曲,這是由馬蹄渦縱向渦所引起的;③b艉翼和主艇體交接部位馬蹄渦對流場的干擾,表現為槳盤面上艉翼與主艇體結合部對應位置處的伴流等值線向內發生彎曲,同樣是由該處馬蹄渦縱向渦輸運所引起的,即漩渦(縱向渦)將其影響區域中外半徑速度相對較高的流體帶入到內半徑,同時將內半徑速度相對較低的流體帶入到外半徑,使得內半徑處流體軸向速度分量增大而外半徑處流體軸向速度分量減小,從而引起槳盤面軸向伴流等值線彎曲。這種漩渦強度越大,其影響能力就越強,等值線的彎曲將越劇烈。
所以,尋找方法來控制水下航行體主艇體與指揮臺圍殼、艉翼等附體結合部位的馬蹄渦的生成和發展,削弱下游馬蹄渦系的強度,就能減小其對艉流場的影響,提高螺旋槳伴流場的周向均勻度,改善螺旋槳的進流品質,降低螺旋槳及推進軸系的振動噪聲并改善其水動力性能。
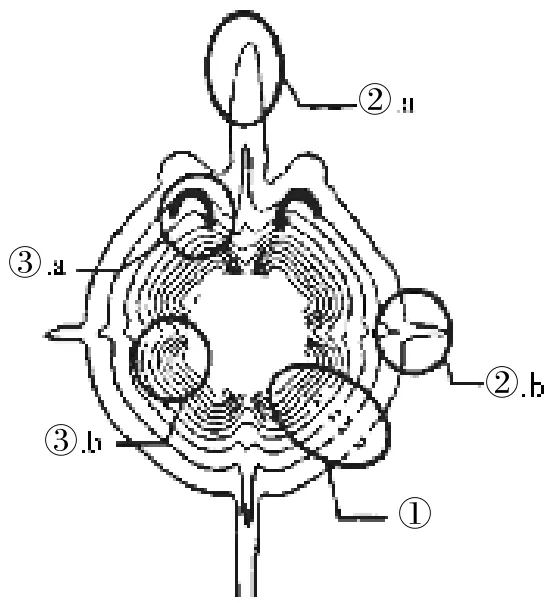
圖4 槳盤面處軸向速度等值線分布圖Fig.4 Iso-contours of axial velocity at the propeller disc
2 水下航行體模型選取與艉翼填角形式設計
本文選取的研究對象為某無人水下航行體,該航行體主艇體為回轉體,如圖5所示,艇體總長度不大于10 m,中橫剖面直徑小于0.6 m,主要附體為艉部的四面十字形布局艉翼。艉翼剖面為NACA0010翼型,根部弦長為0.4 m,最大厚度為4 cm,高度為0.25 m。該航行體采用對轉大側斜螺旋槳推進,螺旋槳直徑約0.35 m。
由于馬蹄渦系是由艉翼前緣逆壓梯度造成的分離渦量積累產生,如若在艉翼前緣角區增加適當的填角過渡,降低該處流場的逆壓梯度,減小分離渦量的積累,就能削弱馬蹄渦核的強度,從而減小馬蹄渦對下游流場的影響。趙峰等進行了相關的研究,表明艉翼填角前伸長度較長時能較好地提高螺旋槳盤面流場的均勻度。根據這一思路,針對本文研究的水下航行體對象設計了一種艉翼填角形式,如圖6所示。四塊艉翼填角分別設置在四面艉翼前緣,緊貼主艇體。填角前伸長度約10 cm,達到了艉翼最大厚度的2.5倍,最大高度約6 cm,最大寬度約3 cm,剖面形狀截取自弦長0.3 m的NACA0010翼型,填角與艉翼接合部位選取了合理的平緩過渡形式,以求盡量減小接合部位的形狀變化對流場產生的擾動。
圖5 水下航行體示意圖Fig.5 The unmanned underwater vehicle
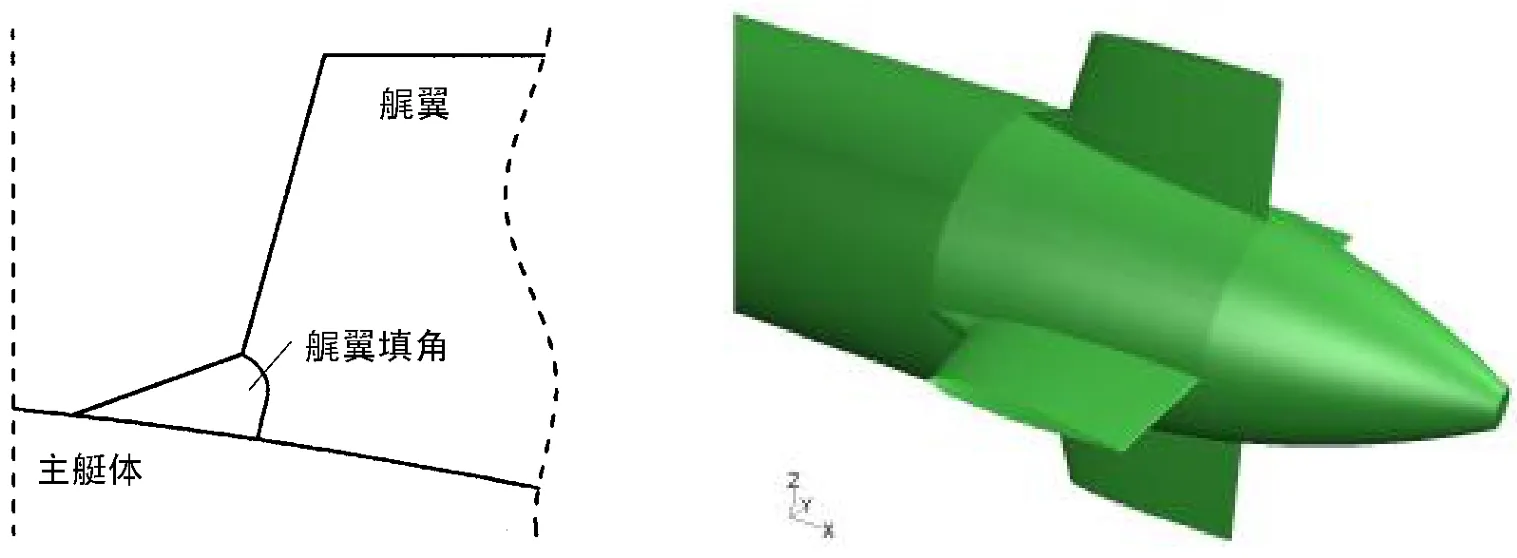
圖6 艉翼填角示意圖Fig.6 The fillet of stern appendage
3 螺旋槳伴流場的CFD數值模擬
3.1 CFD計算方法
國內外對水下航行體粘性流場的計算研究已經很普遍,綜合了大量計算實例的驗證后,本文選取了雷諾平均N-S方程(RANS方程)結合SST k-ω湍流模型進行水下航行體艉流場的模擬。k-ω湍流模型有好的穩定性,由于計及了流線曲率和逆壓梯度的效應,能精確預報壓力梯度流動的對數層,故能正確模擬艉部伴流場等值線的“鉤狀”結構,但由于標準k-ω模型對自由來流湍流度的極強依賴性,以及其對阻力預報的糟糕表現,Menter[14]提出了改進型的SST k-ω模型,它結合了標準k-ω模型和kω模型各自的優點,能較好地預報艉流場及阻力。
對研究對象進行計算網格的劃分,采用了多塊結構化網格生成方法,以節約計算機內存資源,提高計算效率與計算精度。劃分網格時將流場特征變化明顯的近壁流域和流場特征變化很小的遠場流域分開處理,近壁流域網格劃分緊密,遠場流域網格劃分相對稀疏,分界面兩邊的網格作非對稱處理,網格在3個方向上的加細率為,在平行中體處,計算網格第一層節點到壁面的法向無因次距離y+≈10,能夠充分捕捉近壁面的流場信息,網格單元總數約1 400萬,計算網格如圖7所示。
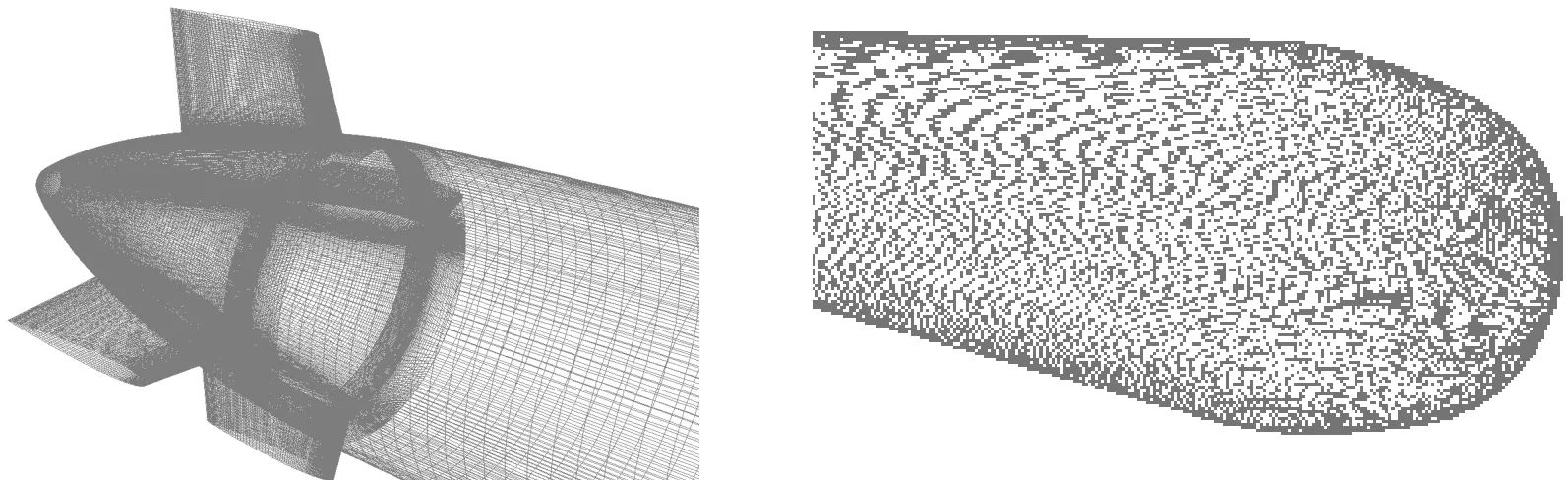
圖7 水下航行體流場計算網格示意圖Fig.7 Computational grid for underwater vehicle
計算過程中,流動控制方程和湍流模型方程采用有限體積法在計算網格單元上進行數值離散,方程里的對流項采用二階迎風差分格式離散,擴散項采用中心差分格式離散,速度壓力耦合方程采用PISO算法求解。數值離散后的代數方程組采用Gauss-Seidel迭代法求解,利用多重網格技術加速迭代收斂。
3.2 CFD計算結果及分析
在HP工作站上運行Fluent,計算該水下航行體在5 kns航速下的流場,選取對轉螺旋槳前槳位置作為研究的螺旋槳槳盤面位置,分別得到設置艉翼填角前后的航行體槳盤面處伴流場軸向速度等值線分布圖,如圖8所示。
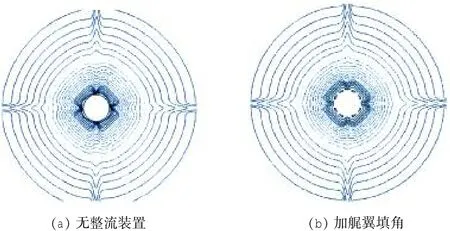
圖8 軸向速度等值線分布圖比較Fig.8 Comparison on Iso-contours of axial velocity
由圖8可以看出,加艉翼填角后,伴流場軸向速度等值線的彎曲程度明顯下降,說明艉翼填角能較好地改善槳伴流場的周向不均勻度,抑制馬蹄渦強度。
圖9-1給出了水下航行體設置艉翼填角前后槳盤面伴流場無因次軸向速度隨周向角的變化。圖中,橫坐標為周向角θ,定義艇體正上方為0°,以逆時針旋轉方向為正向;縱坐標為軸向伴流無因次速度Ux/U0,Ux為伴流場軸向速度分量,U0為無擾動來流速度;R代表主艇體中橫剖面半徑;0.3R表示0.3倍主艇體中橫剖面半徑處位置,以此類推。
由圖9-1可以看出,設置艉翼填角后,0.3-0.8R區間內0°、90°、180°和270°艉翼對應位置處軸向伴流速度的峰值均有所減小,艉翼與主艇體結合部馬蹄渦對艉部伴流場的影響得到削弱,在0.7R附近已近于消失,隨著半徑的增長,艉翼粘性艉流的影響逐漸顯現。
圖9-2給出了水下航行體設置艉翼填角前后各半徑處伴流無因次軸向速度的比較結果。由于本文研究對象航行體螺旋槳直徑不超過主艇體直徑的0.6倍,下圖僅給出0.3-0.6R區間內的比較結果。
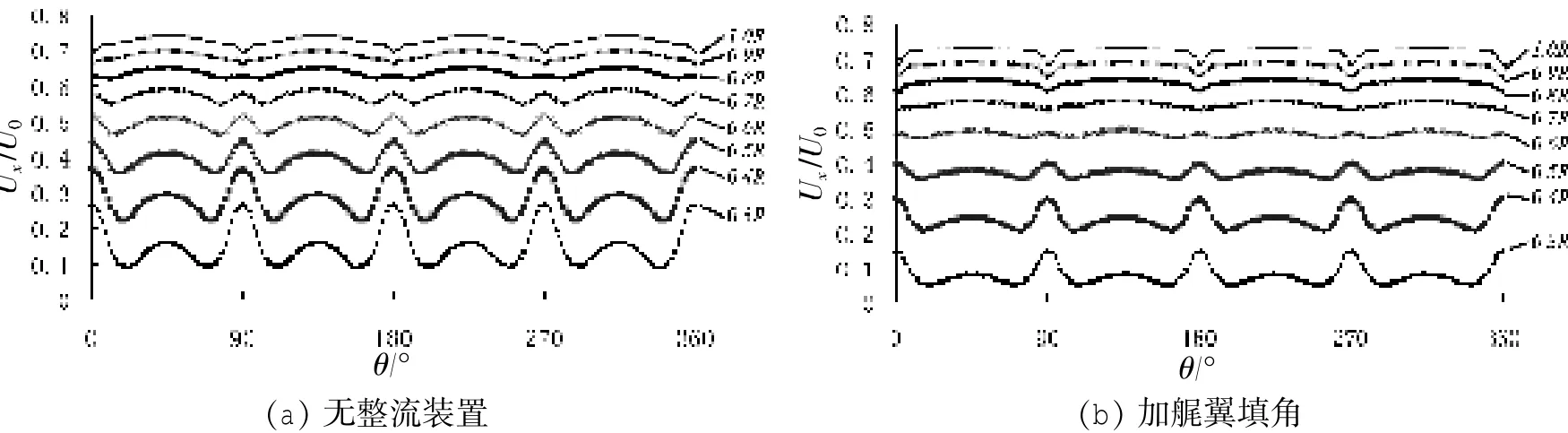
圖9-1 無因次軸向速度變化曲線Fig.9-1 The non-dimensional axial velocity curves
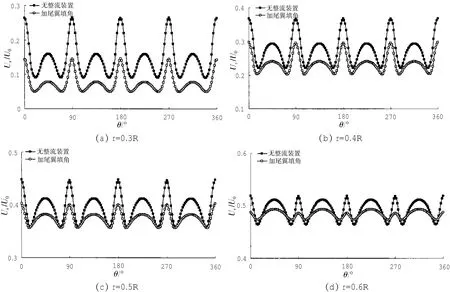
圖9-2 無因次軸向速度變化曲線的比較Fig.9-2 Comparison on the non-dimensional axial velocity curves
由圖9-2可以進一步看出,在0.3-0.6R區域內,艉翼填角明顯減小了馬蹄渦對艉流場帶來的伴流峰值。還可看出,在0.3-0.5R區間內,艉翼填角在一定程度上減小了伴流場平均軸向速度。
為了對艉翼填角的整流效果進行評價,參考文獻[15]給出了不均勻度系數,對水下航行體槳盤面流場軸向速度分量的周向不均勻性進行了定量描述。槳盤面某半徑上流場軸向速度分量的周向不均勻度系數為:
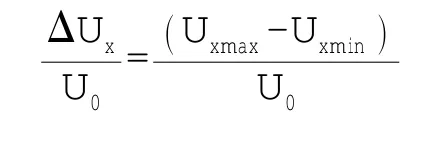
式中:Uxmax、Uxmin分別為該半徑上流場軸向速度分量的最大值和最小值。
由不均勻度系數計算公式,得出設置艉翼填角前后槳盤面處各半徑位置上流場軸向速度分量的周向不均勻度系數比較,如表1所示,繪制成曲線,如圖10所示。
表1和圖10更清晰地展現了艉翼填角優化伴流場的效果。設置艉翼填角使槳盤面0.3-0.6R半徑區間內,伴流場軸向速度的周向不均勻度系數下降了35%-62%,而該區間為本文研究航行體螺旋槳工作區間。這說明,艉翼填角使螺旋槳的進流品質得到了很好的改善,應能降低螺旋槳葉片上的非定常力脈動幅值,改善推進軸系與螺旋槳系統的振動噪聲性能。
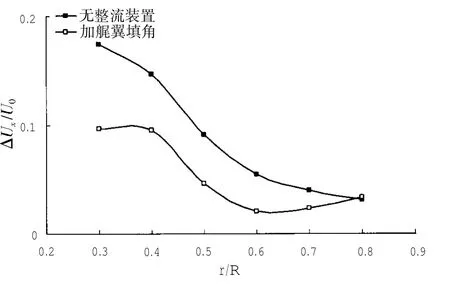
圖10 槳盤面處軸向速度不均勻度系數比較Fig.10 Comparison on the circumferential non-uniformity of axial velocity at propeller disc
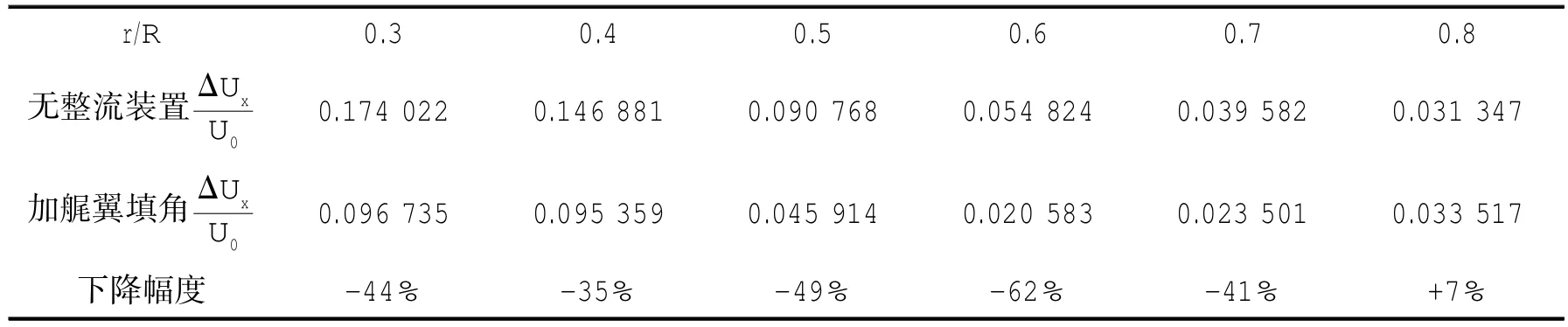
表1 槳盤面處軸向速度不均勻度系數比較Tab.1 Comparison on the circumferential non-uniformity of axial velocity at propeller disc
4 艉翼填角降噪效果的試驗研究
4.1 試驗對象
降噪是一門試驗科學,需要將理論研究與試驗研究緊密結合。對于一個特定水下航行體的噪聲評估,通常采取的是總體航行輻射噪聲評估方式。由于噪聲來源本身的復雜性,給分析其水動力噪聲、機械噪聲、螺旋槳噪聲三者的成分帶來了極大的困難,特別當涉及兩者以上相互耦合時,理論分析手段就顯得十分乏力,這就給降噪措施的選取帶來了極大難度。艉翼填角在錯綜復雜的噪聲成分控制中究竟能取得何種效果,顯然需要經過航行輻射噪聲測試試驗考核。
本節選取的水下航行體試驗對象,與上章CFD計算模型一致。試驗前,共加工了四件艉翼填角試驗件,分別安裝在四面艉翼前緣根部,緊貼主艇體,如圖11所示。試驗件長約10 cm,最大高度約6cm,最大寬度約3 cm,剖面形狀截取自弦長0.3 m的NACA0010翼型,該試驗件與上章CFD計算模型完全相同。航行體采用對轉大側斜螺旋槳推進,螺旋槳直徑約0.35 m。

圖11 艉翼填角安裝圖片Fig.11 Photo of assemblage for a fillet of stern appendage
4.2 噪聲測試方法與工況
噪聲測量系統由水下測量平臺、光電復合纜、水面單元和聲信標四部分組成,其系統組成框圖如圖12所示。噪聲測量系統測量頻率范圍3 Hz~20 kHz,測量動態范圍80 dB,測量頻段內水聽器接收靈敏度為-205 dB±0.5 dB,測量誤差±2 dB,水下測距最大誤差0.5%。
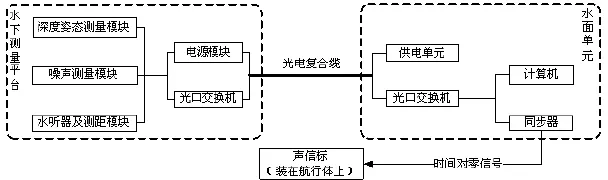
圖12 噪聲測量系統框圖Fig.12 The noise-measuring system
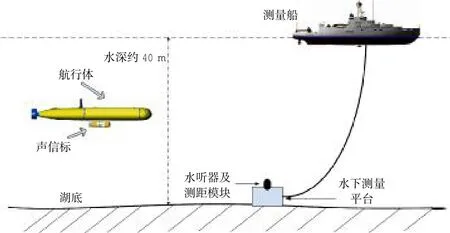
圖13 噪聲測量示意圖Fig.13 Demonstration of noise-measurement
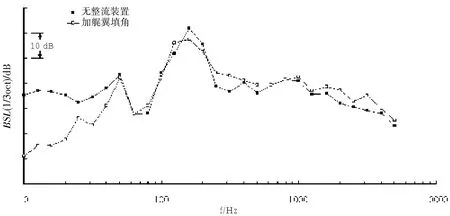
圖14 噪聲頻域信號分析結果Fig.14 Result of noise analysis in frequency domain
聲信標安裝在水下航行體下方,測量前,利用同步器進行時間對零。測量時,測量船停機錨泊在湖面上,噪聲測量系統由應急電源供電。使水下航行體定深勻速直航通過測量區域,采集實時通過距離和聲壓級信號,最終換算為水下航行體總聲源級,即距離認為的點聲源1 m處的總聲級,參照基準聲壓為1 μPa。噪聲測量示意圖如圖13所示。
選取的試驗水域為淤泥底質,水深約40 m,水面開闊。試驗前,利用聲速測量儀測量當前水介質聲速。測量時,要求周圍無航行船只,風力小于2級,流速小于1節,測得環境背景噪聲約85 dB,水下航行體試驗航速為5 kns。
4.3 試驗結果與分析
分別對水下航行體不安裝整流裝置和安裝艉翼填角試驗件兩種狀態進行噪聲測量試驗,每組狀態各采集兩次有效的航行輻射噪聲數據,計算兩次數據的平均值,得出總聲源級數值。結果顯示,安裝艉翼填角試驗件后,航行體輻射噪聲總聲源級下降3.4 dB。噪聲頻域信號分析結果如圖14所示。其中,橫坐標為頻率,以對數坐標表示,單位Hz;縱坐標為1/3倍頻程的帶寬聲壓級BSL,以線性坐標表示,單位dB。
由圖14可知,加裝艉翼填角試驗件后,航行體低頻輻射噪聲顯著下降,100 Hz以下頻率,1/3倍頻程帶寬聲壓級降幅達5-25 dB,但該頻段噪聲不是該航行體的主要噪聲成分,其對總聲源級降幅的貢獻有限。頻譜中,聲壓級最高幅值出現在150 Hz附近,加裝艉翼填角使該處聲壓級降低約4 dB,可見艉翼填角對總聲源級抑制的貢獻,主要來源于該頻段內噪聲的下降。螺旋槳模型試驗表明,該工況下螺旋槳空泡數仍較大,遠未達到空泡初生條件。從噪聲頻譜中觀察,亦未見明顯的高頻噪聲峰值信號,說明該螺旋槳未產生空泡噪聲。但加裝艉翼填角試驗件后,高頻段內噪聲有略微增加,其原因是否為艉翼填角引起還有待進一步分析,不排除為試驗誤差導致。試驗結果說明,該艉翼填角對航行體低頻輻射噪聲有較好的控制效果。
5 結 論
本文針對某水下航行體設計了一種艉翼填角形式,以抑制艉翼與主艇體交接部位的馬蹄渦,提高螺旋槳伴流場均勻度,達到降低航行體輻射噪聲的目的。CFD數值計算表明,設計的艉翼填角能使螺旋槳盤面處伴流場軸向速度的周向不均勻系數下降35%-62%,具有改善螺旋槳進流的效果。應用該艉翼填角安裝于水下航行體樣機,進行噪聲測量試驗,艉翼填角使航行體5 kns航行輻射噪聲降低3.4 dB,其中,對低頻噪聲的抑制較明顯。研究顯示了艉翼填角對水下航行體噪聲良好的控制效果,為水下航行體優化伴流場的降噪設計提供了數據支撐。
[1]尤立克R J.水聲原理[M].洪 申,譯.哈爾濱:哈爾濱船舶工程學院出版社,1990. Urick R J.Principles of underwater sound[M].Translated by Hong Shen.Harbin:Harbin Shipbuilding Engineering Institute Press House,1990.
[2]趙 峰,張 軍,徐 潔,洪方文.尾附體與主體連接形式對尾流場不均勻度影響的PIV測試評估[J].船舶力學, 2001,5(5):6-14. Zhao F,Zhang J,Xu J,et al.PIV estimation on the nonuniform wake flow caused by different junction forms of stern appendages[J].Journal of Ship Mechanics,2001,5(5):6-14.
[3]Davenport W,Dewitz M,et al.Effects of a fillet on the flow past a wing body junction[C]//27th AIAA Aerospace Science Meeting.Reno,1989.
[4]王錫良.主附體接合部角區干擾流動計算[R].無錫:中國船舶科學研究中心科技報告,1991.
[5]李 定,周連第.附體與主體接合部的流場及不同連接形式對流場影響的試驗研[J].水動力學研究與進展A輯, 1991,6(3):55-62. Li D,Zhou L D.The effect of junction form on body-appendage junction flows[J].Journal of Hydrodynamics(Ser.A), 1991,6(3):55-62.
[6]張 軍,等.PIV水池實用化進程之五—五種尾附體填角形式的尾流場測試告[R].無錫:中國船舶科學研究中心科技報告,2001.
[7]李新汶,陳 源,王文琦.CFD在潛艇艉附體與艇體連接形式研究中的應用[J].船舶力學,2003,7(5):28-32. Li X W,Chen Y,Wang W Q.Application of CFD to Junction Form of Stern Appendages[J].Journal of Ship Mechanics, 2003,7(5):28-32.
[8]Burstein N M.Boundary-layer investigation on a body of revolution with fins[R].AD-623323,1965.
[9]張 楠,沈泓萃,姚惠之.潛艇噴流流場數值模擬研究[J].船舶力學,2007,11(1):10-21. Zhang N,Shen H C,Yao H Z.Numerical simulation of jet flow around submarine[J].Journal of Ship Mechanics,2007,11 (1):10-21.
[10]Batcho P F.Method and apparatus for mitigating junction flows[P].Patent No.:US 6,186,445 B1,2001.
[11]劉志華,熊 鷹,王展智,等.潛艇新型整流方法的設計與試驗研究[J].中國造船,2010,51(3):47-55. Liu Z H,Xiong Y,Wang Z Z,et al.Design and experimental study on a new wake control method of submarine[J].Shipbuilding of China,2010,51(3):47-55.
[12]張 華,呂志詠,孫盛東.應用PIV對角區非定常馬蹄渦結構的實驗研究[J].力學學報,2008,40(2):171-178. Zhang H,Lü Z Y,Sun S D.The experimental study on unsteady horseshoe vortex structure in juncture flow with PIV[J]. Chinese Journal of Theoretical and Applied Mechanics,2008,40(2):171-178.
[13]Huang T,Liu H L,Groves N,et a1.Measurements of flows over an axisymmetric body with various appendages in a wind tunnel[C]//Proceeding of 19th Symposium on Naval Hydrodynamics.Seoul,Korea,1992.
[14]Menter F R.Two-equation eddy-viscosity turbulence models for engineering applications[J].AIAA Journal,1994,32(8): 269-289.
[15]Zhang Jun,Zhao Feng,Hong Fangwen,et al.Application of PIV technique in towing tank[J].Selected Papers of the Chinese Society of Naval Architects and Marine Engineers,2002,15:54-59.
Experiment and numerical simulation of denoising fillets of stern appendages on underwater vehicle
LI Meng-jie1,WANG Meng-xuan1,WANG Li1,LIU Zhi-hua2
(1.Yichang Testing Technique Research Institute,Yichang 443003,China;2.Department of Naval Architecture Engineering,Naval University of Engineering,Wuhan 430033,China)
To reduce the noise of underwater vehicle,denoising fillets of stern appendages are investigated. The effect of the horseshoe vortexes generated at body-appendage junctions on the underwater vehicle wake is analyzed,and these horseshoe vortexes may exert adverse effects on the noise of underwater vehicle.A type of fillets of stern appendages adapted for an unmanned underwater vehicle(UUV)is designed.Its effect on wake optimization is numerically simulated by Computational Fluid Dynamics(CFD)method.The results show that the circumferential non-uniformity of axial velocity at propeller disc is reduced by 35%-62%.To test the denoising performance of fillets of stern appendages,the noise of a voyaging underwater vehicle is measured.The results show that the overall sound source level of UUV noise is reduced by 3.4 dB when fillets of stern appendages are added.At low frequencies,its denoising performance is better.
underwater vehicle;horseshoe vortex;denoising;fillet of stern appendage;CFD;noise measurement
U661.3
:A
10.3969/j.issn.1007-7294.2016.10.015
1007-7294(2016)10-1345-10
2016-04-22
國家部委基金資助項目
李孟捷(1989-),男,碩士,工程師,通訊作者,E-mail:limengjiecsic@163.com;王夢璇(1989-),女,助理工程師;王 力(1978-),男,高級工程師;劉志華(1981-),男,博士,講師。