海洋拖曳系統的船/纜/體耦合模型研究
2016-05-03 01:24:32苑志江金良安蔣曉剛鄭智林
船舶力學 2016年10期
苑志江,金良安,遲 衛,蔣曉剛,鄭智林
(海軍大連艦艇學院,遼寧大連116018)
海洋拖曳系統的船/纜/體耦合模型研究
苑志江,金良安,遲 衛,蔣曉剛,鄭智林
(海軍大連艦艇學院,遼寧大連116018)
為進一步提高海洋拖曳系統在不同情況下運動響應的預測精度,將拖曳母船、拖纜和拖曳體三者視為一個相互作用的整體,利用其耦合邊界條件,將拖纜頂端和底端的張力及其產生的力矩,分別與船舶操縱性運動方程(MMG模型)和拖體六自由度運動方程相結合,利用拖纜的有限差分方程,建立了船/纜/體三者耦合模型,進而采用數值計算方法,對比分析了該模型與常規算法。結果表明,該模型考慮船/纜/體三者的耦合影響,可更加準確全面地反映拖曳母船的速度、旋回半徑、橫搖角等操縱性特征以及拖曳體的深度、姿態等信息所受到的影響,從而為準確預報海洋拖曳系統的運動響應提供更為直觀、科學的理論依據。
船舶;海洋拖曳系統;耦合模型;拖纜;拖曳體
0 引 言
海洋拖曳系統作為一種有效的水下探測平臺,已被日益廣泛地應用于海洋研究、監測與水聲對抗等諸多領域,并發揮著越來越重要的作用,它通常由拖曳母船、拖纜和拖曳體等部分組成[1]。實際工作時,拖曳母船、拖纜和拖曳體受到的流體作用力具有明顯的非線性特點[2],母船通過拖纜提供拖曳體運動驅動力的同時,拖曳體受到的流體作用力也會通過拖纜反作用于母船,三者任一運動狀態的改變,均會影響到整個系統的運動狀態。三者之間存在的這一耦合影響作用,使得系統在不同情況下運動響應特性的準確預報成了一個難點問題,這也是拖曳系統設計過程中必須考慮的一個重要方面[2-3],具有重要的工程應用價值。為此,國內外學者特針對海洋拖曳系統水動力理論模型進行了廣泛深入的研究,以提高其設計的科學性和合理性。
當前,有關海洋拖曳系統的水動力理論模型研究成果,可分為拖纜模型和拖曳體模型兩個方面。拖纜理論模型主要包括集中質量法模型[4-5]、有限元法模型[6-7]、有限差分法模型[8-10]和直接積分法模型[11]等四種,前兩種在海洋拖曳系統中運用最為廣泛,特別是有限差分法更適合計算大時間步長的計算情況[2]。關于拖曳體理論模型研究方面,部分學者將拖曳體視為球狀物體[12-13],其拖曳體不具有姿態信息,這與實際物理情況差距較大,為了更加準確地描述拖曳體的運動,一些學者采用剛體六自由度運動方程[5,14]。然而,當前有關海洋拖曳系統的研究,往往鑒于拖曳母船的巨大質量,而忽略母船與纜/體之間的耦合影響作用,直接將拖曳母船的運動信息代入拖纜和拖曳體的運動模型當中,例如,在進行拖曳系統旋回運動仿真計算時,將拖點的航速和回轉半徑視為常數,忽略進入回轉圈的過程,且未考慮回轉過程中船速降低的影響,同時拖船自身運動對于纜/體的影響也被忽略,這一系列均會對整個系統的預報精度產生明顯影響,特別是當母船相對較小,而拖曳系統其它部分質量相對較大時,造成的誤差可能很大[15]。
目前,針對這一耦合影響問題進行的研究很有限,僅有拖纜對船/纜、纜/體兩者耦合模型等部分成果[9-10,15-16],而關于母船、拖纜和拖曳體三者耦合作用影響的全面分析,則國內外均未見文獻報道。為此,本文將拖曳母船、拖纜和拖曳體視為一個相互影響的整體,充分考慮船/纜/體三者間的耦合影響,將拖纜頂端和底端的張力及其力矩,分別與艦船操縱性運動方程和拖曳體六自由度運動方程相結合,利用耦合邊界條件,建立船/纜/體的耦合模型,以預報各種機動條件下拖纜和拖曳體的運動響應和拖曳母船運動狀態的改變。這對于保證整個拖曳系統的高效運行和精確實施控制,具有現實意義和理論價值,特別是可作為一種設計工具,在設計初期即可充分考慮各種機動情況,以設計更加科學高效的拖曳系統,從而代替造價昂貴的原型試驗。
1 耦合模型的建立
1.1 耦合模型的建立思想
為了便于分析系統的運動特性,并建立整個系統的運動模型,本文引入了4個右手直角坐標系,即慣性坐標系,其三個坐標單位矢量為(i,j,k);拖船隨體坐標系,其坐標單位矢量為(is,js,ks);拖纜局部坐標系,其坐標單位矢量為(t,n,b);拖曳體隨體坐標系,其坐標單位矢量為(ib,jb,kb)。其中:慣性坐標系原點選取水面任意一點,k軸向下;船體隨體坐標系,其原點一般取在船舶重心位置處,縱軸is指向船首,橫軸js指向右舷,ks軸指向下方;拖纜隨體坐標系,t為拖纜的切向方向,n、b為拖纜的兩個法向。拖曳體隨體坐標系三個軸向的方向定義與船體隨體坐標系一致。
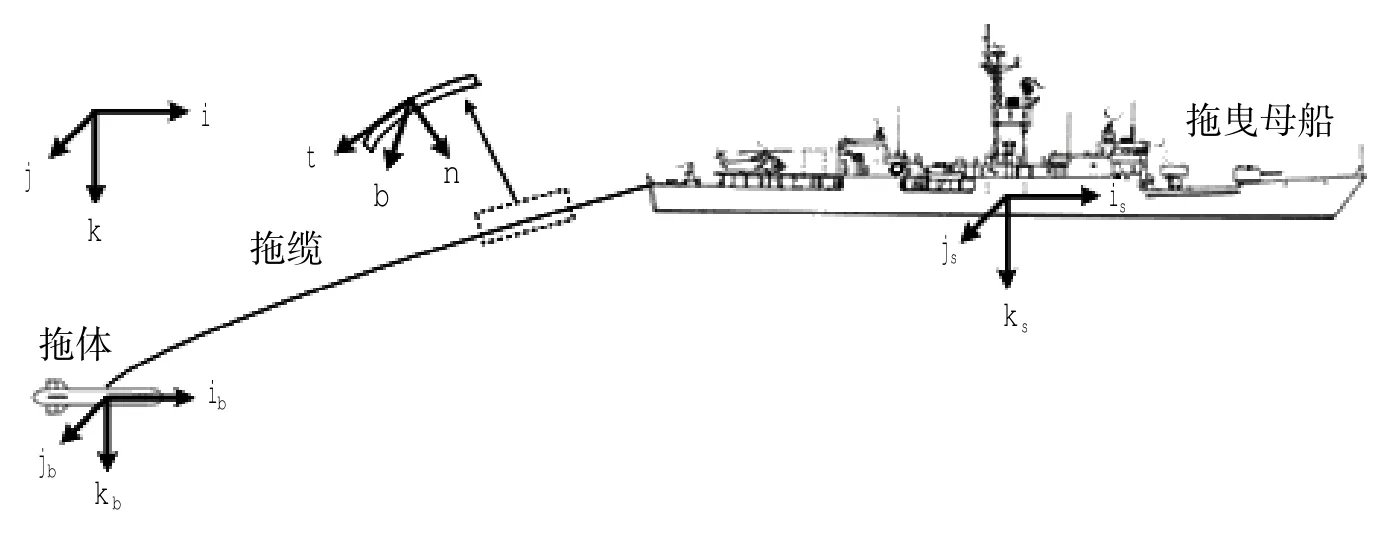
圖1 海洋拖曳系統坐標系Fig.1 The coordinate frames of underwater towed system
海洋拖曳系統的船/纜/體耦合模型是指將拖曳母船、拖纜和拖曳體視為一個耦合作用的整體,從而建立整個系統運動模型。該模型建立的基礎為拖纜運動模型(有限差分法)、拖曳母船操縱性運動模型(MMG模型)和拖曳體運動模型(剛體六自由度運動方程)。首先,由于拖纜頂端與拖曳母船相連接,則拖纜頂端的拉力及其產生的力矩,將會影響拖曳母船的運動響應,與此同時,拖曳母船的運動也會通過拖纜頂端傳輸至拖纜和拖曳體,基于此關系,可將拖纜頂端張力及其產生的力矩引入拖曳母船操縱性運動模型,從而實現船/纜的耦合,同理,也可建立纜/體的耦合;其次,由于拖纜頂端和底端分別與拖曳母船和拖體具有相同的速度,則可建立船/纜和纜/體耦合邊界條件;最后,將上面建立的方程聯立,從而完成船/纜/體耦合方程組的建立。
構建海洋拖曳系統耦合模型的另一個關鍵問題是建立其數值求解算法。由于三者的運動模型均為非線性方程,且存在著非線性耦合影響,這就決定整個系統運動模型的非線性特點。針對這一復雜的非線性方程組,難以直接求得其解析解,只能采用數值計算的方法,實現系統運動模型的求解。建立數值計算方法的基本思路為:使用中心有限差分法,將拖曳母船、拖纜和拖曳體的運動模型以及耦合邊界條件,分別在時間和空間上進行離散,將整個系統模型中包含的偏微分方程組和微分方程組,均變為差分方程的形式,組成整個系統的非線性代數方程組,進而使用牛頓迭代算法求解。
1.2 耦合模型建立的基礎
(1)拖纜運動模型
拖纜運動模型采用有限差分法[8],假設拖纜為細長、柔性、圓柱形,且拉力隨時間變化。根據拖纜上的任意一點的力平衡,可得矢量方程式:

式中:s表示纜上一定點到上端點之間未伸長前的纜長;T為拖纜的張力;W為單位長度拖纜減去浮力后的重力;F為單位長度拖纜受到流體的作用力;B為單位長度拖纜的慣性力,即達朗伯力;a為拖纜運動加速度。
通過推導,拖纜的運動控制方程可寫成如下的偏微分方程[9]:

在拖纜上任意一點,其拖纜的局部坐標與慣性坐標系之間的關系由下式確定:

其中:[D]為拖纜的局部坐標與慣性坐標之間的轉換矩陣[9]。
(2)拖曳母船操縱運動模型

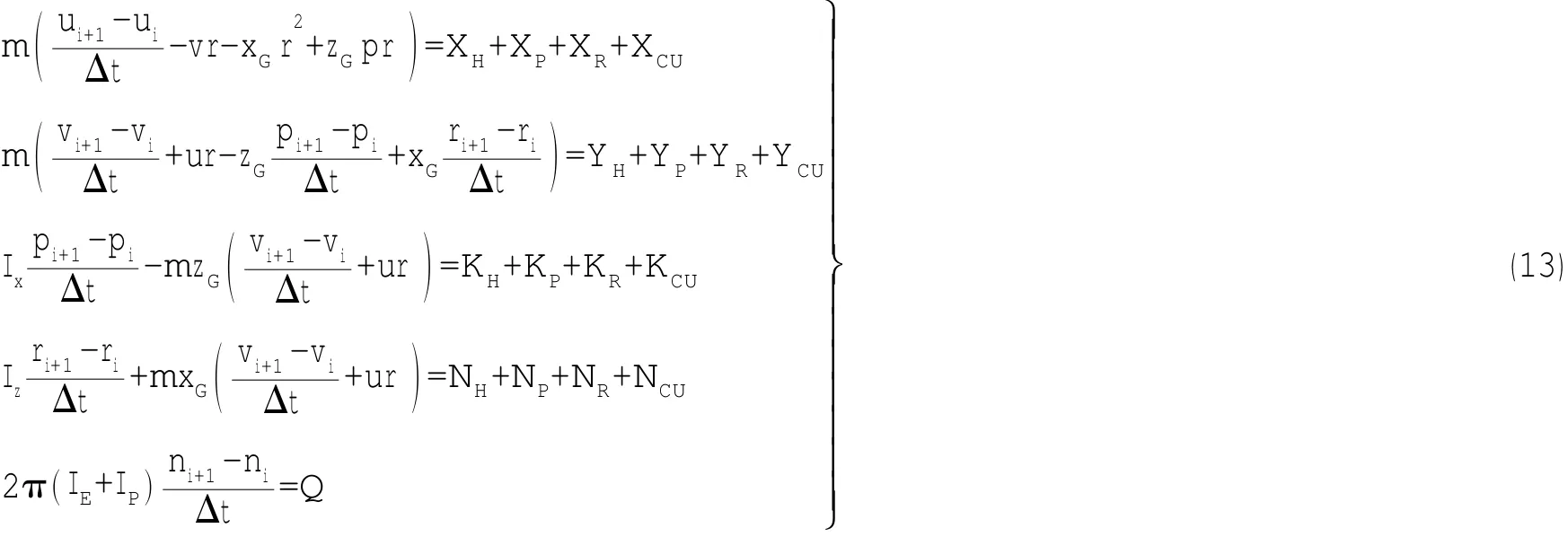
拖曳母船操縱運動模型借鑒分離式MMG操縱運動數學模型[17],即拖曳母船在槳、舵操縱下的四自由度(縱向、橫向、橫搖、艏向)運動方程可寫為:式中:m表示拖曳母船的質量;xG和zG表示拖曳母船質心在船體坐標系下的坐標;Ix和Iz分別表示拖曳母船繞is和ks軸的轉動慣量;u、v、p和r分別為船舶的縱向速度、橫向速度、橫傾角速度和艏向角速度;為其響應的加速度;下標H、R、P和CU分別表示船體、舵、槳和拖纜頂端的作用力和力矩;IE、IP分別為主機軸和螺旋槳的轉動慣量;Q為主機軸和螺旋槳所受的外力矩(包括水動力矩和主機輸出扭矩)。
有關船體、舵、槳受力及其力矩的計算公式可參考文獻[17]。拖纜頂端張力及其力矩,可根據作用力與反作用力的原理計算得到。假設拖纜頂端的張力在拖纜局部坐標系下的表達式為TCU=[TCU0 0]T,則拖纜頂端張力在拖曳母船隨體坐標系下的表達式為

式中:R( φ,θ,ψ)為船體坐標系與慣性坐標系之間的旋轉矩陣,φ、θ和ψ分別為拖曳體的橫搖角、俯仰角和偏航角。
拖纜頂端張力產生的力矩為

式中:rCU為拖纜頂端在拖船坐標系下的位置坐標。
(3)拖曳體運動模型
根據動量和動量矩方程,拖曳體的運動模型可以寫為[10]

τ的計算方法與常規水下航行器的算法一致,詳見文獻[10];拖纜底端張力及其產生力矩的計算方法為,假設拖纜底端的張力在拖纜局部坐標系下的表達式為則拖纜底端拉力在拖曳母船隨體坐標系下的表達式為

拖纜底端張力產生的力矩為

式中:rCE為拖纜底端在拖曳體隨體坐標系下的位置坐標。
1.3 耦合模型解算的具體形式
(1)船/纜耦合邊界條件
由于拖曳母船與拖纜頂端的速度相同,則可以建立船/纜耦合邊界條件,如下:


(2)纜/體耦合邊界條件
同理,拖曳體與拖纜底端的速度相同,則可以建立纜/體耦合邊界條件,如下:
(3)拖纜運動控制方程的離散表示
拖纜離散使用中心有限差分法,即將拖纜在空間上沿其長度方向,離散成為N個微元Δsj,時間上離散為一系列的時間步長Δti。拖纜的節點編號從1至N+1,其中第1點為頂端,第N+1點為底端,每個節點都包含6個節點變量則(2)式在時間和空間上離散的差分方程形式為:

其中:上標i表示第i步時間,下標j表示第j段拖纜微線段。沿拖纜一共有6N個如(12)式形式的差分方程。
(4)拖曳母船操縱運動模型的離散表示
當構建(11)式時,可建立3個方程,但引入了拖曳母船的運動變量,可將(4)式在時間上進行中心有限差分,可得
(5)拖曳體運動模型的離散表示
在構建(12)式時,又引入了12個有關拖曳體運動信息的未知變量,則可通過拖曳體運動控制方程求解得到,即將(8)式在時間上中心離散,具體如下:

通過(14)、(15)式可得到12個差分形式的非線性方程,將(10)-(15)式聯立,便可得到整個系統運動方程的離散形式,共包含了6(N+1)+16個代數方程,形成封閉方程組,使用牛頓迭代算法便可進行定解。
2 數值計算與分析
本部分將采用數值計算的方法,檢驗船/纜/體耦合模型的正確性,分析海洋拖曳系統在穩態運動和拖曳母船機動時的運動響應,并與常規算法(直接將拖曳母船運動信息代入纜/體耦合模型)的計算結果進行對比,分析兩種算法之間存在的差異,闡述建立三者耦合運動模型的意義。為了行文方便,下文將拖曳母船自身運動信息直接代入拖曳系統計算的常規算法,簡稱為“拖船自身”,船/纜/體耦合模型,簡稱為“整個系統”。
2.1 系統參數設置
本文選用的拖曳系統,其拖曳母船選擇一艘定螺距單槳單舵船,其具體參數設置:主尺度為115 m×25.4 m×8.5 m;排水量為8173 t;舵面積為18.03;展弦比為1.40;螺旋槳直徑為5.53 m;螺距為5.02 m;伴流為0.26;推力減額為0.21。拖纜和拖曳體的物理參數設置分別參見表1和表2。

表1 拖纜參數設置Tab.1 The physics coefficients of towed cable

表2 拖曳體參數設置Tab.2 The physics coefficients of towed body
2.2 穩態運動仿真與分析
穩態運動是指拖曳系統的工作環境為靜水時,拖曳母船以某一恒定的速度,拖帶著纜/體沿直線穩定航行的運動樣式[16]。系統在不同主機工況(螺旋槳轉速)時的穩態運動速度,可經仿真程序運算足夠長的時間而得到。本文選擇螺旋槳轉速n=10、20、30和40 r/min,兩種算法計算得到拖曳母船穩態速度如表3所示。由表3可見,當纜/體影響作用計入后,整個系統的拖曳速度相對于拖船自身的速度具有明顯下降,當轉速n=10 r/min時,降幅可達13.0%,并且不同螺旋槳轉速時,降幅有所不同,速度越低,其降幅越大,即纜/體對拖曳母船的影響更為明顯。
由于計入纜/體耦合影響后,整個系統的拖曳速度與拖船自身的航速存在差異。這將影響系統受到的流體作用力,因此,在進行穩態運動分析時,為保證拖曳系統纜形和張力分布等信息的預報精度,不可忽略了這一影響。圖2(a)給出了不同螺旋槳轉速時,兩種方法計算得到的穩態纜形,可以明顯看出,兩種方法計算得到的空間纜形具有一定的差異,計入纜/體耦合影響后的系統深度要大于相同轉速下,常規算法計算得到的系統深度,并且轉速越低兩者之間的差距就越明顯。與此同時,由圖2(b)可看出拖纜的張力分布也存在差異,船/纜/體耦合模型計算得到的張力分布要小于常規算法的計算結果,并且拖曳速度越大,這一差異越為明顯。
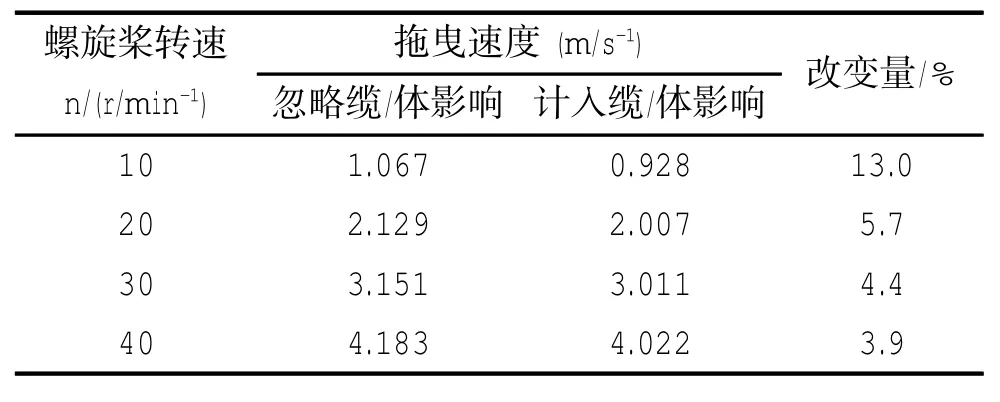
表3 不同主機工況時拖曳系統的速度Tab.3 The velocity at different engine condition
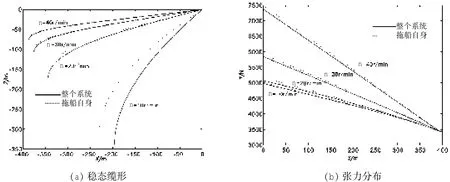
圖2 不同螺旋槳轉速時纜形及其張力分布Fig.2 The cable configurations and tension distribution
當采用船/纜/體三者耦合模型進行海洋拖曳系統穩態運動預報時,通過與常規算法計算結果進行對比分析,可知當計入三者之間耦合影響時,整個系統在穩態速度、纜形、張力分布等方面,均存在明顯的差異。因此,在進行系統穩態運動預報時,不可忽略三者之間的耦合影響。
2.3 系統機動仿真與分析
為檢驗拖曳母船機動時,船/纜/體三者耦合模型的正確性。拖曳母船螺旋槳轉速分別選擇n=10、20、30和40 r/min,舵角為10°,進行360°旋回運動。假定系統從穩定直航狀態開始作旋回,逐漸進入穩定旋回狀態,當拖曳母船航向改變360°時,開始進行回舵操作,而后重新進入直線航向。
圖3給出了螺旋槳轉速n=10 r/min時,船/纜/體三者耦合模型計算得到的拖曳系統旋回運動的三維軌跡圖,當螺旋槳轉速變化時的仿真結果與圖3相似。為了更好地進行對比分析,圖4給出了拖曳母船旋回運動軌跡圖,從圖4可見,當計入纜/體影響后,拖曳母船的旋回半徑會有所減小,即拖曳系統使得拖曳母船的回轉性能變好,事實上拖曳系統以拖纜頂端張力的形式作用在船體上,導致這一張力分解得到的縱向力和橫向力,改變拖曳母船的回轉性能,其中縱向力與阻力方向相同,使得船舶回轉中速度降低,具有提高回轉性能的趨勢。并且,由圖5可以看出,在旋回的過程中,拖曳體位于拖曳母船回轉軌跡內側,即橫向力的方向為指向拖曳母船軌跡內側,具有增大舵效的作用,即可提高船舶回轉性能。
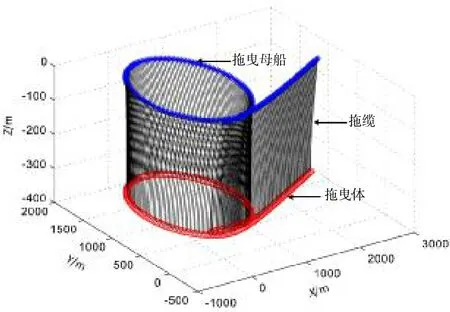
圖3 拖曳系統三維軌跡圖Fig.3 The trajectory of underwater towed system
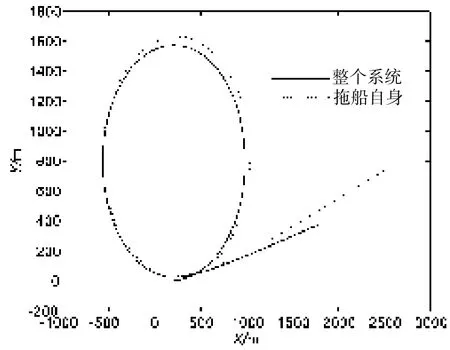
圖4 拖曳母船回轉軌跡Fig.4 The trajectory of towing ship
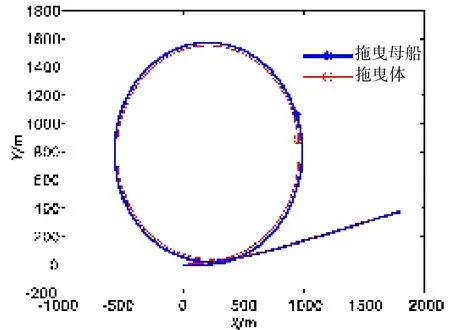
圖5 拖曳系統運動軌跡俯視圖Fig.5 The trajectory of towing ship
由船舶操縱性理論可知,船舶在旋回過程中其運動狀態會呈現強烈的非線性變化,其軸向速度、橫向速度和橫搖角等是重要操縱性參數[30]。根據拖曳系統穩態速度的對比結果,可知拖曳母船旋回過程中其旋回速度也必會受到影響。圖6(a)和(b)分別給出了船舶旋回過程中其軸向速度和橫向速度的變化歷程,其中,虛線代表拖船自身(忽略纜/體對船影響)旋回運動時的速度變化,實線代表船/纜/體三者耦合模型計算結果,可見拖曳母船的橫向和軸向速度會發生非線性變化,并且,當計入纜/體影響后,計算得到橫向和軸向速度,均小于常規算法計算得到的結果,兩者之間存在一定的差值,并且拖曳母船的速度越低,這一差值越大。
當計入纜/體影響后,拖曳母船除了其軸向和橫向速度會受到影響外,其橫搖角也是一項重要檢測指標。圖7給出了分別采用兩種算法得到拖曳母船旋回過程中,其橫搖角的變化歷程。從圖中可以看出,當計入纜/體影響后,拖曳母船的橫搖角會有所降低。

圖6 船舶旋回過程中速度變化Fig.6 The velocity of towing ship at different rudder angle
由圖6可知,在拖曳母船旋回運動過程中其軸向和橫向速度會明顯變化,這也必將使得拖纜和拖曳體受到的流體作用力發生改變,從而影響拖曳體的深度。圖8給出了旋回過程中拖曳體深度變化的歷程圖。從圖中可以看出,當拖曳母船開始旋回機動時,拖曳母船軸向速度降低,導致受到的流體作用力降低,拖曳體深度變大,隨著旋回機動的進行,軸向速度趨于穩定,拖曳體的深度逐漸趨于穩定,當拖曳母船恢復直線航行時,拖曳體的深度逐漸減小,最終達到旋回機動前的穩態數值。并且,由圖8還可明顯看出,當計入纜/體影響后計算得到拖曳體深度,與常規算法計算得到的深度具有明顯的差距,并且,拖曳母船航速越低時,這一差距越為明顯。
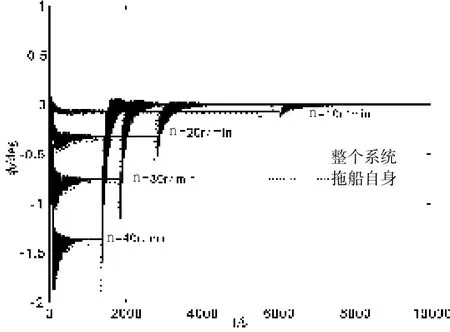
圖7 拖曳母船橫搖角Fig.7 The velocity of towing ship at different rudder angle

圖8 船舶旋回過程中速度變化Fig.8 The velocity of towing ship at different rudder angle

圖9 船舶旋回過程中速度變化 Fig.9 The velocity of towing ship at different rudder angle
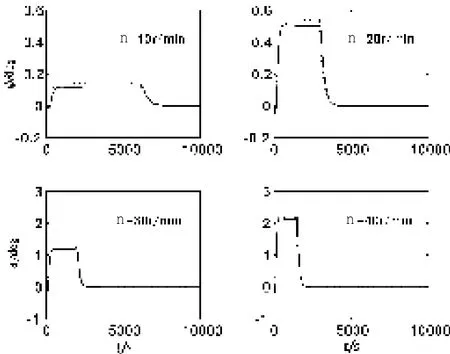
圖10 船舶旋回過程中速度變化Fig.10 The velocity of towing ship at different rudder angle
在拖曳母船旋回過程中,拖曳體的姿態也會發生非線性變化,圖9和圖10分別給出了拖曳體俯仰角和橫搖角的時間變化歷程(實線表示“整個系統”,虛線表示“拖船自身”)。由圖9可以看出,當開始旋回運動時,拖曳體俯仰角首先出現負值,這表示拖曳體俯首運動,隨著旋回運動的進行,拖曳體的俯仰角逐漸達到某一數值,當拖曳母船再次進入直航時,拖曳體俯仰角增大,開始仰首運動,當拖曳母船航速逐漸趨于穩定時,拖曳體的俯仰角逐漸達到未旋回運動時的狀態。從圖中可看出,計入纜/體影響后,拖曳體的俯仰角變化有所降低,主要是纜/體產生的作用力對于船舶的俯仰運動產生了阻尼作用。同理,在旋回過程中,拖曳體的橫搖角也會發生規律性變化,且計入纜/體影響后,其橫搖角響應也有所下降(見圖10)。
綜上所述,海洋拖曳系統機動時兩種算法得到的結果存在的一定差異,采用船/纜/體耦合模型可以更加準確地預測拖曳系統的動態響應。
3 結 語
為進一步提高海洋拖曳系統在不同情況下的預報精度,本文在充分考拖曳母船、拖纜和拖曳體耦合影響的基礎上,將三者視為一個整體進行考慮,建立了船/纜/體三者耦合模型。為檢驗模型的正確性,采用數值仿真計算的方法,與常規計算方法進行了對比分析,數值結果表明當使用船/纜/體三者耦合模型后,相比較而言,系統運動響應表現出:
(1)拖曳母船的回轉直徑會變小;
(2)拖曳母船的運動速度會降低;
(3)由于拖曳系統產生的張力和力矩的作用,船舶的橫搖角有所降低;
(4)拖曳體的深度會增大;
(5)拖曳體的俯仰角和橫搖角會降低。
[1]Yuan Zhijiang,Jin Liangan,Chi Wei.Finite difference method for solving the nonlinear dynamic equation of underwater towed system[J].International Journal of Computational Methods,2014,11(4):85-89.
[2]吳家鳴,郁 苗,朱琳琳.帶纜遙控水下機器人水動力數學模型及其回轉運動分析[J].船舶力學,2011,15(8):827-836. Wu Jiaming,Yu Miao,Zhu Linlin.A hydrodynamic model for a tethered underwater robot and dynamic analysis of the robot in turning motion[J].Journal of Ship Mechanics,2011,15(8):827-836.
[3]王海波.水下拖曳升沉補償液壓系統及其控制研究[D].杭州:浙江大學,2009. Wang Haibo.Research on the underwater towed heave compensation hydraulic system and control strategies[D].Hangzhou: Zhejiang University,2009.
[4]Walton T S,Polachek H.Calculation of transient motion of submerged cables[J].Mathematics of Computation,1960,14: 27-46.
[5]Buckham B,Nahon M.Dynamics and control of a towed underwater vehicle system,part I:model development[J].Ocean Engineering,2003,30:453-470.
[6]Garrett D L.Dynamic analysis of slender rods[J].Journal of Energy Resources Technology,1982,104:302-306.
[7]Leonard J W,Nath J H.Comparison of finite element and lumped parameter methods for oceanic cables[J].Engineering Structures,1981,3:153-167.
[8]Ablow C M,Schechter S.Numerical simulation of undersea cable dynamics[J].Ocean Engineering,1983,10:443-457.
[9]孫洪波,施朝鍵,林文錦.船—纜拖曳系統操縱性能分析[J].船舶力學,2015,19(11):1325-1333. Sun Hongbo,Shi Chaojian,Lin Wenjin.Analysis of maneuverability of towing cable ship system[J].Journal of Ship Mechanics,2015,19(11):1325-1333.
[10]杜曉旭,宋保維,潘 光.AUV水下回收過程中的操縱性仿真研究[J].船舶力學,2011,15(8):837-843. Du Xiaoxu,Song Baowei,Pan Guang.Simulation of an AUV underwater recovery[J].Journal of Ship Mechanics,2011,15 (8):837-843.
[11]Sun Y,Leonard J W,Chiou R B.Simulation of unsteady oceanic cable deployment by direct integration with suppression [J].Ocean Engineering,1994,21:243-256.
[12]沈曉玲.深海拖曳系統動力學分析研究[D].上海:上海交通大學,2011. Shen Xiaoling.Research on the hydrodynamic of deep underwater towed system[D].Shanghai:Shanghai Jiao Tong University,2011.
[13]Grosenbaugh Mark A.Tansient behavior of towed cable systems during ship turning maneuvers[J].Ocean Engineering, 2007,34:1532-1542.
[14]Feng Z,Allen R.Evaluation of the effects of the communication cable on the dynamics of an underwater flight vehicle[J]. Ocean Engineering,2004,31:1019-1035.
[15]王 飛,黃國樑,伍生春.水下拖曳系統纜/船耦合運動模擬[J].上海交通大學學報,2011,45(4):570-575. Wang Fei,Huang Guoliang,Wu Shengchun.Dynamic research on the coupling response of cable-towing ship system[J]. Journal of Shanghai Jiao Tong University,2011,45(4):571-575.
[16]Wang Zhibo,Sun Gang.Parameters influence on maneuvered towed cable system dynamics[J].Applied Ocean Research, 2015,49:27:41.
[17]吳秀恒.船舶操縱性[M].北京:國防工業出版社,2005. Wu Xiuheng.Ship maneuverability[M].Beijing:National Defence Industrial Press,2005.
Research on the coupling model of underwater towed system
YUAN Zhi-jiang,JIN Liang-an,CHI Wei,JIANG Xiao-gang,ZHENG Zhi-lin
(Dalian Naval Academy,Dalian 116018,China)
In order to predict the behaviors of the underwater towed system under different conditions more precisely,the towing ship,towed cable and towed vehicle are treated as a whole.Using the boundary condition of the system,the tension and moment of the towed cable’s upper end and bottom end are used into the MMG model of ship and the six freedoms equation of towed vehicle respectively.Moreover,coupling with the finite difference method of towed cable,the couple model of whole system is established.The numerical method is developed based on this model to predict the behaviors of the underwater towed system.Compared with normal method,the numerical results indicate that the velocity,turning radius,roll angle of towing ship and the depth,attitude of towed body are affected.This model can be used as the basic theory for predicting the behaviors of underwater towed system.
ship;underwater towed system;coupling model;towed cable;towed body
U661.33
:A
10.3969/j.issn.1007-7294.2016.10.005
1007-7294(2016)10-1252-10
2016-04-24
國防預研項目(5131402031)
苑志江(1983-),男,博士研究生,講師,E-mail:yuanyr0531@163.com;金良安(1966-),男,教授,博士生導師。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19