基于正交實驗的汽車-兩輪車碰撞事故再現(xiàn)的參數(shù)影響研究*
2016-04-12 01:21:02方勝勇
汽車工程 2016年5期
胡 林,方勝勇,陳 強
(1.長沙理工大學,公路工程教育部重點實驗室,長沙 410114; 2.長沙理工大學汽車與機械工程學院,長沙 410114;3.長沙理工大學,工程車輛安全性設(shè)計與可靠性技術(shù)湖南省重點實驗室,長沙 410114; 4.中國汽車技術(shù)研究中心,天津 300162)
2016092
基于正交實驗的汽車-兩輪車碰撞事故再現(xiàn)的參數(shù)影響研究*
胡 林1,2,方勝勇2,3,陳 強4
(1.長沙理工大學,公路工程教育部重點實驗室,長沙 410114; 2.長沙理工大學汽車與機械工程學院,長沙 410114;3.長沙理工大學,工程車輛安全性設(shè)計與可靠性技術(shù)湖南省重點實驗室,長沙 410114; 4.中國汽車技術(shù)研究中心,天津 300162)
汽車-兩輪車碰撞事故再現(xiàn)的關(guān)鍵是確定碰撞速度。本文在動力學分析的基礎(chǔ)上建立了汽車與兩輪車相互側(cè)面碰撞的模型,得到了兩車碰撞速度的表達式;篩選出影響汽車、兩輪車碰撞速度推算和事故再現(xiàn)結(jié)果準確性的主要參數(shù);通過具體的事故案例設(shè)定正交實驗,分別獲得了對汽車、兩輪車的參數(shù)影響權(quán)重順序;據(jù)此指導(dǎo)PC-Crash對一起真實的汽車-兩輪車碰撞案例進行模擬重建。結(jié)果表明,按參數(shù)權(quán)重順序輔助汽車-兩輪車碰撞事故的再現(xiàn)仿真,可用較短時間再現(xiàn)與實際事故情況相吻合的結(jié)果。
汽車-兩輪車碰撞;事故再現(xiàn);碰撞模型;正交實驗;參數(shù)影響
前言
據(jù)報道,世界各地每年有180 000名電動自行車駕駛者死于交通事故,且大多數(shù)發(fā)生在發(fā)展中國家[1]。我國汽車與兩輪車(摩托車、電動自行車、自行車)發(fā)生的碰撞事故占有較大比例,是我國交通事故中的一種重要的事故形態(tài)。2012年我國共發(fā)生汽車-兩輪車碰撞交通事故44 388起,導(dǎo)致10 922人死亡,直接財產(chǎn)損失10 252.1萬元,分別占交通事故總起數(shù)、死亡人數(shù)量和財產(chǎn)損失的21.74%,18.2%和8.73%[2]。目前用于事故再現(xiàn)分析的軟件主要有PC-CRASH[3]、SMAC[4]、CRASH[5]、清華大學的事故分析系統(tǒng)[6]、長安大學的TACAR[7]等。這些軟件大多是以動量定理建立碰撞模型,同時引入碰撞中心的概念[8]。在實際運用時,由于事故過程中包含著很多的不確定參數(shù),使對車輛碰撞速度的鑒定和碰撞事故過程的分析產(chǎn)生一定的不準確性,甚至某些參數(shù)的微小變化會引起碰撞模型計算結(jié)果產(chǎn)生較大的誤差。文獻[9]中對汽車-自行車碰撞事故車速的多值計算問題進行了研究,提出利用不同方法來進行多級綜合評判。文獻[10]中將不確定度分析方法引入汽車碰撞事故再現(xiàn)的模型算法中,以此推算車輛碰撞前速度的不確定度。文獻[11]中對典型的碰撞模型中的碰撞前速度方向參數(shù)和碰撞中心位置參數(shù)進行了敏感度分析,給出了其數(shù)學表達式和適用范圍。文獻[12]中從碰撞前后階段、碰撞階段分別建立車對車碰撞事故參數(shù)敏感性模型,分析了事故再現(xiàn)系統(tǒng)的參數(shù)敏感性。這些研究主要是利用正向的數(shù)學解析計算模型來進行參數(shù)分析,在一定程度上明確了影響汽車碰撞事故車速計算的參數(shù),而且可以較為準確地獲得車輛的碰撞速度和碰撞點等物理量;但是這樣的碰撞模型適用性不高,具體的碰撞模型只能對特定的事故類型進行分析,且往往要借助計算機。由于運用計算機軟件進行模擬需要輸入很多參數(shù),且某些輸入?yún)?shù)的準確度對輸出的結(jié)果影響很大,因此,要得到一個很好的再現(xiàn)結(jié)果需要花費較長時間來進行輸入?yún)?shù)的調(diào)整。如果可以確定影響再現(xiàn)結(jié)果準確性的各參數(shù)的權(quán)重,再有針對性地指導(dǎo)輸入?yún)?shù)的調(diào)整,能夠在較好獲得仿真結(jié)果的同時大大縮短再現(xiàn)仿真的時間周期,而且對事故現(xiàn)場的勘查也具有現(xiàn)實的指導(dǎo)意義。
本文中以汽車-兩輪車碰撞事故類型為例,利用正向的數(shù)學力學解析計算模型來分析影響碰撞速度計算的參數(shù),再運用正交實驗分析法對這些參數(shù)的權(quán)重進行排序,并將權(quán)重排序結(jié)果應(yīng)用于國內(nèi)一起真實的汽車-兩輪車碰撞案例的PC-Crash重建,驗證所提方法的有效性。
1 參數(shù)提取
1.1 汽車-兩輪車碰撞事故再現(xiàn)過程
汽車-兩輪車碰撞過程可分為3個階段:(1)碰撞前階段,駕駛員發(fā)現(xiàn)危險到兩車剛開始接觸;(2)碰撞階段,兩車剛開始接觸到兩車開始分離為止;(3)碰撞后階段,兩車開始分離到完全停止[13]。在實際事故再現(xiàn)中一般先根據(jù)路面的制動痕跡、停車位置和道路情況等使用軌跡模型來估算碰撞后的車輛速度,然后依據(jù)碰撞模型計算出碰撞時車輛的速度,最后利用計算出的結(jié)果和事故現(xiàn)場信息作為仿真軟件的輸入,模擬出碰撞過程并與事故現(xiàn)場結(jié)果進行比對,若不滿意則按優(yōu)化算法調(diào)整初始數(shù)據(jù)重新計算,也即用逆向計算來指導(dǎo)軟件正向模擬。因此,建立合適的碰撞運動模型得到準確性較高的參數(shù)值對軟件的模擬操作具有很大的實際指導(dǎo)意義。
1.2 汽車-兩輪車側(cè)面碰撞的運動模型
通常,汽車-兩輪車碰撞事故類型可以分成3種情況:(1)兩輪車迎面撞擊汽車,即正面碰撞;(2)兩輪車側(cè)面遭到汽車撞擊,即側(cè)面碰撞;(3)兩輪車被汽車追尾,即追尾碰撞。此外還有一種特殊情況,即同向刮擦,兩輪車與汽車同方向并排行駛,當汽車右轉(zhuǎn)彎時,兩輪車因避讓不及被汽車刮倒在地。通過對中國交通事故深入研究項目(China In-Depth Accident Study, CIDAS)2013年在廣東佛山和吉林長春采集的142起汽車-兩輪車碰撞事故進行統(tǒng)計分析,其中側(cè)面碰撞占45%,正面碰撞占30%,是兩輪車碰撞事故的兩種主要事故形態(tài),本文中主要對這兩種事故類型進行研究。
1.2.1 汽車對兩輪車的側(cè)面碰撞運動模型
汽車與兩輪車側(cè)面碰撞事故如圖1所示,碰撞發(fā)生后質(zhì)量為m1的兩輪車(編號01)沿與y軸夾角θ1的方向滑動L1距離后停止;騎車人則沿與y軸夾角θp方向飛出,拋出距離為LP;而汽車(編號02)則沿原來前進方向繼續(xù)滑行L2后停止。
根據(jù)事故現(xiàn)場勘測得到的碰撞位置、制動痕跡、滑動痕跡和車體上的碰撞痕跡中心等信息,經(jīng)正則化處理后可以推斷出車輛的瞬間運動軌跡,從而得到車輛碰撞時刻的速度。
汽車-兩輪車碰撞過程非常短暫,碰撞時撞擊力很大。因此,可以運用動量守恒定律計算碰撞前汽車車速和兩輪車速。在圖1x方向上運用動量守恒定理可得
m2v20=m2v2+m1v1sinθ1+mpvpsinθp
(1)
式中:m1,m2和mp分別為兩輪車、汽車和騎車人的質(zhì)量;v20為汽車碰撞前速度;v1,v2和vp分別為兩輪車、汽車碰撞后速度和騎車人拋出速度;θ1和θp分別為碰撞后兩輪車滑動方向與y軸夾角和騎車人拋出角度。
由于兩輪車系統(tǒng)質(zhì)量(m1+mp)與汽車質(zhì)量m2相差懸殊,碰撞過程中汽車在y方向的運動不顯著,而且不易測出。故在y方向運用動量定理求解出的結(jié)果會造成較大誤差。由于騎車人與兩輪車在碰撞前是一起以v10的速度運動,與汽車碰撞后如果忽略摩擦力的作用,騎車人由于慣性作用在y方向?qū)е@個速度拋出。因此,可以把騎車人拋出速度vp的y方向分量作為兩輪車碰撞前的速度,即
v10=vpcosθp
(2)
式(1)和式(2)中的汽車、兩輪車碰撞后速度v1,v2和騎車人的拋出速度vp可以依據(jù)事故現(xiàn)場路面留下制動痕跡和滑動痕跡運用能量守恒和平拋運動公式來進行求解。
碰撞后騎車人被拋出,其在水平方向的運動距離為拋射運動距離和接觸地面后的滑行距離之和,分別可由式(3)、式(4)和式(5)求解,即
Lp=x1+x2
(3)
(4)
(5)
得
(6)
式中:Lp,x1和x2分別為騎車人拋出總距離、拋射距離和滑行距離;g為重力加速度;h為騎車人的質(zhì)心高度;μp為人體與路面間的摩擦因數(shù),根據(jù)國外的實驗數(shù)據(jù)取值為0.5~0.7(干燥混凝土或瀝青路面)[14]。
兩輪車碰撞后的速度v1可通過地面的滑動距離來求解:
(7)
可得
(8)
式中:L1為兩輪車滑動距離;μ1為兩輪車車身與地面的摩擦因數(shù)。
同理求出碰撞后汽車速度為
(9)
式中:L2為汽車制動印跡長度;μ2為汽車輪胎與地面的摩擦因數(shù)。
結(jié)合式(1)、式(2)、式(6)、式(8)和式(9)可求得碰撞前兩輪車速和汽車車速為
(10)
(11)
由式(10)和式(11)可知,碰撞前兩輪車和汽車的速度及其影響因素可表示為
v=f(fm1,fmp,μ2,μ2,μp,θp)
(12)
其中:fm1=m1/m2;fmp=mp/m2
1.2.2 兩輪車對汽車側(cè)面碰撞的運動模型
兩輪車對汽車側(cè)面的碰撞事故如圖2所示,高速行駛的兩輪車迎面撞擊正在行駛中汽車的側(cè)面。
同理,運用動量定理和能量守恒定理可得到碰撞前兩輪車速和汽車車速為
(13)
(14)
式中:θ為碰撞前后汽車質(zhì)心在x方向的偏轉(zhuǎn)角。
由式(13)和式(14)可知,碰撞前兩輪車和汽車的速度及其影響因素可表示為
v=f(fm1,fmp,μ,θ)
(15)
式中μ為汽車輪胎與地面摩擦因數(shù)。
根據(jù)逆向計算結(jié)果和事故現(xiàn)場信息,應(yīng)用仿真軟件模擬出碰撞過程是事故再現(xiàn)的第二步。運用PC-Crash軟件進行事故重建,需要輸入很多參數(shù),這些參數(shù)的取值大多依賴于操作者的經(jīng)驗,這勢必會對重建結(jié)果造成較大誤差且需要較多的時間來進行參數(shù)調(diào)整,因此有必要對輸入?yún)?shù)進行權(quán)重分析。通過上面對碰撞速度的分析,結(jié)合PC-Crash軟件優(yōu)化計算器中的參數(shù)和文獻[15]中的研究結(jié)果,確定了11個對汽車-兩輪車碰撞結(jié)果影響最大的參數(shù):兩輪車質(zhì)量、兩輪車車速、汽車車速、汽車質(zhì)量、汽車與地面摩擦因數(shù)、兩輪車與地面摩擦因數(shù)、汽車減速度、碰撞位置、兩輪車質(zhì)心高度、碰撞恢復(fù)系數(shù)和兩車縱對稱面的夾角。
2 參數(shù)權(quán)重分析
選用正交實驗法來對這11個參數(shù)進行分析。基于某一真實案例建立了典型的汽車-兩輪車側(cè)面碰撞模型。在碰撞瞬間,汽車(編號01)車速為45km/h,兩輪車(編號02)車速為20km/h,碰撞位置和碰撞后停止位置情況如圖3所示。
2.1 確定實驗指標做出因素水平表
取參數(shù)變化后仿真得到的兩車最終位置(用兩車質(zhì)心坐標表示)與實際最終位置的偏移量y1和y2(以下簡稱偏移)作為實驗指標,本實驗共有11個重要參數(shù),依據(jù)事故的實際情況設(shè)定3個水平,各因素水平為原模型參數(shù)的±5%,用A~K表示,不考慮因素間的相互作用,得到表1所示的因素水平表。
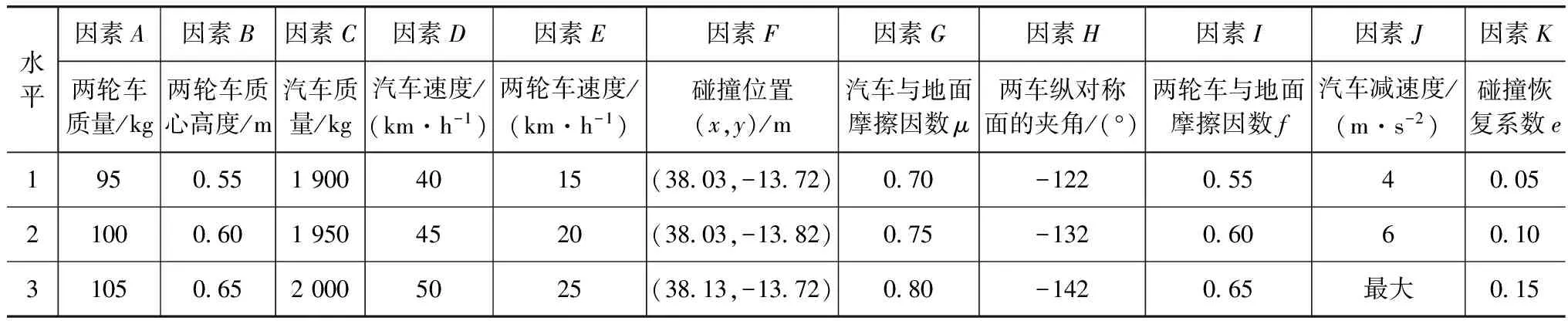
表1 因素水平表
2.2 選取正交表和依照實驗方案獲得實驗結(jié)果
依據(jù)因素水平,不考慮因素間的相互作用,選擇正交表L27(313),由于要實驗的因素是11個,所以有兩列設(shè)置為空列。按實驗序號在PC-Crash軟件中對應(yīng)設(shè)置參數(shù)進行仿真,結(jié)果如表2所示。
2.3 實驗分析獲得參數(shù)影響權(quán)重
方差分析可把實驗指標數(shù)據(jù)總的波動分解為反映因素水平變化引起的波動和反映實驗誤差引起的波動兩部分,然后將它們的平均波動進行比較,得出因素對指標作用效果是否顯著的結(jié)論[16]。具體操作是把觀測數(shù)據(jù)的總的偏差平方和SST分解為反映必然性的各個因素的偏差平方和SS(SSA,SSB,…,SSK)與反映偶然性的誤差偏差平方和SSe,并計算它們的平均偏差平方和MS(MSA,MSB,…,MSK,MSe);再獲得各因素的均偏差平方和與誤差均偏差平方和的比值F(FA,FB,…,F(xiàn)K);最后對于給定的顯著性水平α(本文α取0.1和0.05)查F分布表得到臨界值Fα(f,fe),將F值與臨界值進行比較;以因素A為例,若F0.1(f,fe)
通過以上方差分析可知:所選的11個參數(shù)對兩輪車影響權(quán)重的順序依次為兩車接觸平面角、兩輪車質(zhì)心高度、汽車速度、兩輪車速度、碰撞恢復(fù)系數(shù)、兩輪車與地面摩擦因數(shù)、汽車與地面摩擦因數(shù)、汽車質(zhì)量、兩輪車質(zhì)量、汽車減速度、碰撞位置;對汽車影響權(quán)重的順序依次為汽車減速度、汽車速度、兩輪車與地面摩擦因數(shù)、兩輪車速度、汽車與地面摩擦因數(shù)、碰撞位置、兩車接觸平面角、汽車質(zhì)量、碰撞恢復(fù)系數(shù)、兩輪車質(zhì)量、兩輪車質(zhì)心高度。另外通過比較表3和表4中F與Fα的值可知,汽車速度、兩車接觸平面角、兩輪車質(zhì)心高度、兩輪車速度、碰撞恢復(fù)系數(shù)和汽車減速度這6個參數(shù)對汽車-兩輪車碰撞結(jié)果影響最為顯著。

表2 L27(313)正交表
因此,在應(yīng)用PC-Crash進行汽車-兩輪車碰撞事故再現(xiàn)模擬時,若參與車輛的最終位移誤差較大,可以針對性地調(diào)整汽車速度、兩車接觸平面角、兩輪車質(zhì)心高度、兩輪車速度、碰撞恢復(fù)系數(shù)和汽車減速度等參數(shù)以達到加快得到滿意仿真結(jié)果的目的。
3 案例驗證
2013年某日下午,北京市豐臺區(qū)南二環(huán)外環(huán)輔路,王某駕駛捷達出租車以40km/h速度由西向東行駛至菜戶營橋東時,恰有孔某駕駛兩輪車由北向南穿過馬路。由于王某未按照規(guī)定讓行,汽車前部與兩輪車右側(cè)相撞,造成兩輪車騎車人孔某受傷,兩車損壞的交通事故。圖4為事故現(xiàn)場信息CAD圖。依據(jù)事故現(xiàn)場得到的信息,在PC-Crash中輸入汽車和兩輪車的碰撞位置、速度、碰撞接觸平面角等初始參數(shù),在沒有針對性地調(diào)整各個參數(shù)時難以得到較好的再現(xiàn)結(jié)果,而且也會增加兩車碰撞后停止位置誤差,如圖5和圖6所示。如果按照前面研究得到的參數(shù)權(quán)重來微調(diào)各個輸入?yún)?shù),能很快獲得與實際情況盡可能吻合的碰撞后停止位置,如圖7和圖8所示。兩車的位移誤差在2%左右,汽車和兩輪車的變形量與實際情況相符,故在誤差值的允許范圍內(nèi)認為此次事故再現(xiàn)仿真獲得的結(jié)果是合理的,驗證了上述研究結(jié)論的準確性。

表3 兩輪車位移方差分析表

表4 汽車位移方差分析表
4 結(jié)束語
利用正交實驗法對影響PC-Crash事故重建結(jié)果的11個參數(shù)的影響進行分析,得到其對汽車-兩輪車碰撞再現(xiàn)結(jié)果影響的顯著性順序。結(jié)果表明,依據(jù)本文研究結(jié)論可指導(dǎo)事故現(xiàn)場勘查測量時有針對性地進行信息采集,在保證事故現(xiàn)場勘測的準確性和完整性的同時進一步提高事故現(xiàn)場處理效率;另外,依據(jù)參數(shù)權(quán)重指導(dǎo)參數(shù)推斷和經(jīng)驗參數(shù)值的選取,以獲得較高精度的再現(xiàn)結(jié)果。這為交通部門進行準確、客觀地處理汽車-兩輪車交通事故提供了良好的指導(dǎo)。但是,由于交通事故的類型多樣,本文中只研究了汽車-兩輪車相互側(cè)面碰撞的事故類型,且在利用正交實驗進行參數(shù)顯著性分析時沒有考慮各參數(shù)的交互影響,這將在今后做進一步的深入研究。
[1] QIANG Chen ,YONG Chen, OLA Bostrom ,et al. A Comparison
Study of Car-to-Pedestrian and Car-to-E-Bike Accidents: Data Source: The China In-Depth Accident Study (CIDAS)[C]. SAE Paper 2014-01-0519.
[2] 公安部交通管理局.中華人民共和國道路交通事故統(tǒng)計年報(2012年度)[R].北京:公安部交通管理科學研究所,2013.
[3] CLIFF W E,MONTGOMERY D T. Validation of PC-Crash-A Momentum-Based Accident Reconstruction Program[C]. SAE Paper 960885.
[4] PIOTR Swider, JAN Unarski, WOJCIECH Wach. SMASH Program for Car Accident Simulation[C]. SAE Paper 2000-01-0848.
[5] TERRY D Day, RANDALL L Hargens. Further Validation of Edcrash Using the Ricsac Staged Collisions[C]. SAE Paper 890740.
[6] 李一兵,陳云剛,吳衛(wèi)東.CM 碰撞模型的建立及試驗驗證[J].清華大學學報(自然科學版),2001,41(11):98-101.
[7] 魏朗,陳濤,楊存義.車輛碰撞事故空間模擬再現(xiàn)系統(tǒng)開發(fā)研究[J].中國公路學報,2003,16(4):83-86.
[8] ISHIKAWA H. Impact Model for Accident Reconstruction-Normal and Tangential Restitution Coefficients[C]. SAE Paper 930654.
[9] 許洪國,高蔚,蘇鍵,等.汽車交通事故碰撞速度多值問題的研究[J].中國公路學報,1996,9(1):87-93.
[10] 袁泉,李一兵.汽車碰撞事故再現(xiàn)估算速度的不確定度分析[J].汽車工程,2001,23(4):230-232.
[11] 裴劍平,李一兵,吳衛(wèi)東.事故再現(xiàn)典型碰撞模型的參數(shù)敏感度分析[J].公路交通科技,2002(4):130-133.
[12] 陳濤,魏朗,龔彪,等.車對車碰撞事故再現(xiàn)系統(tǒng)的參數(shù)敏感性分析[J].汽車工程,2012,34(9):771-776.
[13] 陳濤,魏朗,高巖.車輛間碰撞交通事故計算機輔助鑒定技術(shù)綜述[J].中國安全科學學報,2010,20(4):38-43.
[14] 林洋,上山勝,等.機動車事故鑒定方法[M].北京:群眾出版社,1998:121.
[15] 王宏雁,邵文煜.基于PC-Crash的交通事故再現(xiàn)誤差分析[J].同濟大學學報(自然科學版),2009,37(4):531-536.
[16] 潘麗軍,陳錦權(quán).試驗設(shè)計與數(shù)據(jù)處理[M].南京:東南大學出版社,2008:140-144.
A Research on the Parameter Influences of the Accident Reconstruction fora Car-motorcycle Collision Based on Orthogonal Experiments
Hu Lin1,2, Fang Shengyong2,3& Chen Qiang4
1.ChangshaUniversityofScienceandTechnology,KeyLaboratoryofHighwayEngineeringMinistryofEducation,Changsha410114; 2.SchoolofAutomotiveandMechanicalEngineering,ChangshaUniversityofScienceandTechnology,Changsha410114; 3.ChangshaUniversityofScienceandTechnology,HunanProvinceKeyLaboratoryofSafetyDesignandReliabilityTechnologyforEngineeringVehicle,Changsha410114; 4.ChinaAutomotiveTechnologyandResearchCenter,Tianjin300162
The key to the accident reconstruction of car-motorcycle collision is the determination of collision speeds. In this paper, the models for two mutual side collisions between car and motorcycle are set up based on kinetic analysis, with the collision speed expression of two vehicles obtained. The main parameters influencing the accuracies of collision speed reckoning and accident reconstruction are selected. For a specific accident case, orthogonal experiments are performed to obtain the significance order of parameter effects of two vehicles, and based on which as a guide, a reconstruction of a real car-motorcycle crash case is conducted with PC-Crash. The results show that the accident reconstruction of car-motorcycle collision assisted by parameter weight order can reproduce a result well agreeing with real case in shorter time.
car-motorcycle collision; accident reconstruction; collision model; orthogonal experiments; parameter influences
*國家自然科學基金(51475048)、湖南省自然科學基金(2015JJ2001)、湖南省教育廳科研項目(13C1015)和公路工程教育部重點實驗室開放基金資助。
原稿收到日期為2015年1月29日。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
作文大王·低年級(2016年4期)2016-04-18 00:24:37