高速履帶車輛電磁懸掛功率供需矛盾分析
2016-04-12 01:29:13馮占宗魏來生陰運寶范偉光賀力朋
汽車工程 2016年5期
馮占宗,魏來生,陰運寶,范偉光,賀力朋
(中國北方車輛研究所,北京 100072)
2016096
高速履帶車輛電磁懸掛功率供需矛盾分析
馮占宗,魏來生,陰運寶,范偉光,賀力朋
(中國北方車輛研究所,北京 100072)
提出了電磁懸掛功耗計算方法,分析了電磁懸掛功率供需矛盾,論述了電磁作動器基本結構與關鍵技術。分析表明,安裝在有限空間內的電磁作動器輸出功率能滿足主動控制需要,但減速器必須具有緊湊、高速比和互逆傳動功能,電磁裝置具有低轉動慣量、大轉矩等結構特點。
履帶車輛;主動懸掛;電磁作動器;功率需求
前言
主動懸掛是先進懸掛(advanced suspension)形式之一,它根據車輛振動狀態主動調節車體與車輪之間作用力或力矩,使車輛平順性達到最優。但主動懸掛屬于有源懸掛,須由車載動力系統提供動力。如果消耗功率過多導致車輛牽引力不足,反而影響機動性。因此,功耗問題一直被研究人員關注。
關于主動懸掛功耗及計算方法,至今仍無一致意見。1997年,文獻[1]中以高機動軍用運輸車CSV為對象,計算出液壓主動懸掛功耗占到發動機輸出功率的1/4。對于軍用車輛,其高能耗引起的油料補給問題難以承受[2];對民用車輛,其經濟性也不為市場所接受[3]。不過同樣是液壓式主動懸掛,天納克汽車公司研制的Acocar(采用天棚控制算法),當車輛在不平路面上以70km/h時速行駛時,平均功耗僅為98W[4]。
電磁懸掛是主動懸掛的另一種結構形式,它以電磁作動器作為力控制元件,具有效率高、響應快等優點[5],是特種車輛全電化[6]理想的懸掛系統。然而,與液壓式主動懸掛相比,又具有功率密度低的不足。對于高速履帶車輛,由于安裝空間受到嚴格限制,其功率能否滿足控制需要始終被質疑。
本文中以某型越野車輛單輪懸掛試驗臺為研究手段,提出了電磁懸掛功耗計算方法;通過分析在安裝空間約束條件下電磁懸掛技術在功耗、控制力方面存在的供需矛盾,對電磁作動器的基本結構、關鍵技術進行了論證。
1 電磁懸掛功耗計算方法研究
本文中關于電磁懸掛功耗計算過程是,首先計算主動懸掛功耗,然后根據執行元件電磁作動器的效率推算出電磁懸掛功耗。
主動懸掛功耗由車體質量、行駛工況(路況、車速)、平順性目標和所采用的控制算法共同決定。其中,控制算法用于確定執行元件出力大小與時機,進而影響車輛平順性。常見于軍用車輛的控制算法,主要包括恒力控制、天棚控制和開關控制等[7]。其中天棚控制算法是經典控制算法,往往作為評價其它控制算法的基準。本文中選擇天棚控制算法計算主動懸掛功耗。
天棚算法的控制思想是:若令懸掛系統中作動器輸出力追蹤天棚阻尼力,則懸掛系統將具有天棚懸掛的力學特性。天棚阻尼力在數值上可表示為
(1)

如上所述,天棚阻尼力實際上作用于車體與車輪之間,因此主動懸掛功耗由控制力和車體與車輪之間相對運動速度共同決定,即
(2)
由此可知,電磁懸掛功耗為
P=Pa/η
(3)
式中:η為執行元件總效率。
2 主動控制所需功率與轉矩供需矛盾分析
本文中以某高速履帶車輛單輪懸掛系統試驗臺(圖1,車體質量3t)為例進行計算。其中,扭桿彈簧為彈性元件,同時又是平衡肘的旋轉中心。當車輪隨路面起伏時,驅動平衡肘繞扭桿旋轉,扭桿彈簧對車輪受到的沖擊進行緩沖。電磁作動器為控制力執行元件,固定在車體上,其拉臂通過連桿與平衡肘連接。當采用主動控制模式時,電磁作動器拉臂輸出的控制力矩作用在平衡肘上,調節車體與車輪之間的受力狀態。
2.1 所需功率與轉矩
由圖1(b)可知,懸掛系統具有復雜的運動學關系,并受履帶松緊程度的影響。為簡便計算,本文中采用多體動力學仿真軟件adams進行仿真分析。
2.1.1 參數設置
(1)路面模型
佩里曼3#越野路面是美軍坦克機動車輛研究中心常用于測試坦克懸掛性能的一條越野路面。該路面峰-峰差達0.5m,均方根值為0.089m。由于路況差,M1A1主戰坦克在該路面最大車速僅為16km/h[8]。圖2為一段實測路面樣本,長約153.6m。
當路況越差、車速越高時,主動控制所需的控制力矩和功率越高,故選擇該路面作為計算工況,越野平均速度取16km/h。
(2)主要元件力學特性
車輪剛度:根據試驗數據(圖3)和多體動力學仿真軟件adams參數設置格式,按平衡點(輪胎壓縮量為5.09mm)將車輪剛度擬合成3次方曲線:y=2.23×1011x3。
懸掛剛度:試驗表明,扭桿彈簧與扭轉角之間存在線性關系,考慮到限位器的緩沖作用和履帶牽拉作用,將扭桿彈簧剛度設置為圖4所示的非線性。
被動懸掛阻尼系數:根據試驗數據,取2 500N·m·s/rad。
主動懸掛參數:天棚阻尼比取0.35,單輪懸掛的偏頻取1.25Hz。根據式(1),控制力矩設置為:2×0.35×6.28×1.25×3000×VY(Body.PSMAR),其中3 000為車體質量。
2.1.2 結果分析
(1)采用不同懸掛時平順性比較
圖5為采用被動懸掛時車體振動加速度時域及頻域曲線。圖中表明,在給定路面、車速時,車體振動加速度峰值最大值可達2.8g,均方根為0.44g。其中加速度峰值超過了人體乘坐車輛振動極限標準2.5g,表明車輛的平順性差,會降低乘員的工作效能。
圖6為采用主動懸掛后車體振動加速度時域和頻域曲線。圖中表明,車體振動最大加速度峰值為1.02g,均方根為0.24g。與被動懸掛相比,最大加速度峰值與均方根值分別降低63.6%與45.5%,達到了采用主動懸掛的預期目標。
(2)阻尼力矩與控制力矩比較
圖7為采用被動懸掛時減振器輸出阻尼力時域和頻域曲線。圖中表明,在給定工況下,被動懸掛的阻尼力矩最大可達20.4kN·m,均方根為3.5 kN·m。常用阻尼力矩主要集中在5.5kN·m區域內。
圖8為采用天棚控制算法后的控制力矩時域和頻域曲線。圖中表明,控制力矩峰值為2.84kN·m,均方根為1.16 kN·m,常用控制力矩在2.4 kN·m區域內,且控制頻率低于2Hz。
對比主動、被動兩種模式下的力矩可見,采用主動控制后,所需力矩遠低于被動懸掛。
(3)所需控制功率工程估算
將作動器拉臂輸出轉矩與角速度繪制在同一坐標內(圖9),可以看出兩者方向并不相同。兩者相同時,說明作動器提供主動力矩,此時電磁裝置相當于電動機;兩者相反時,電磁裝置可充當發電機,提供阻力矩,實現能量回收。
將作動器輸出轉矩與角速度相乘,可計算出作動器控制功率(圖10),均方根值為1.96 kW。由圖可知主動控制時最大功率約為9.0kW。最大功率出現次數較少,常用功率低于6kW;半主動控制時最大功率為12kW,常用功率低于7.5kW。
2.2 高速履帶車輛電磁懸掛所需最大功率
電磁懸掛所需最大功率是確定電磁作動器結構參數的依據之一。上述計算說明,在給定工況下,車體質量為3t的主動懸掛系統需耗功約6~7.5kW。考慮到電磁裝置具有短時過載能力、轉子慣性負載可充當慣容器彌補控制力的不足、安裝空間、散熱條件等因素,在選擇作動器參數時取功耗計算值的下限。假設作動器總效率為85%~90%,根據式(3),當電磁作動器的最大功率設計為8.3~9kW,最大輸出轉矩設計為2.22~2.4 kN·m時,即可滿足主動控制需要。
為避免重復計算,在確定其它車型電磁作動器結構參數時,可采用單位質量功耗2.77~3 kW/t的標準進行估算。
2.3 電磁作動器的基本結構
2.3.1 安裝空間對作動器結構的限制
由于特殊應用環境,對懸掛系統作動器的安裝空間具有較嚴格的限制,本文中研究的作動器安裝空間約為φ300mm×140mm。與13in輪轂電機的外廓尺寸接近。
2.3.2 直驅式電磁作動器的可行性分析
在風力發電、輪轂電機等領域,直驅式電機由于省略了傳動箱,提高了系統可靠性、經濟性而被廣泛應用。
在直驅式電機中,Protean Electric公司研制的輪轂電機是低轉速、大轉矩電機的典型代表,其13in輪轂電機的基本參數如表1所示[9]。該電機采用外轉子結構,最大轉矩可達200N·m。顯然,在安裝空間限制內,直驅式電磁作動器無法滿足要求。
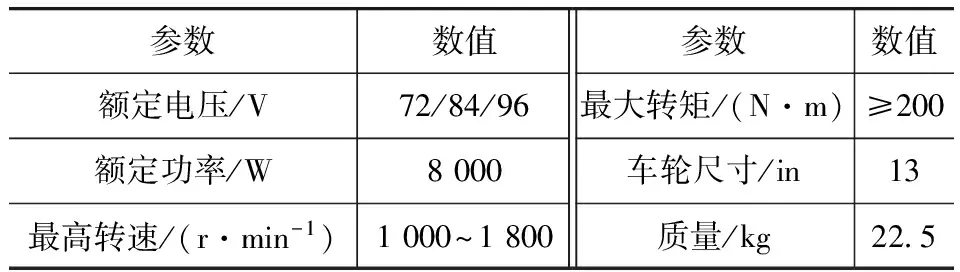
表1 輪轂電機參數
2.3.3 電磁作動器基本結構
電磁作動器基本結構如圖11所示,由傳動機構、電磁感應裝置和相應的控制電路組成。其中,傳動機構用于對電磁感應裝置進行減速增矩。根據表1,如果電磁裝置采用與13in輪轂電機相似的結構(外轉子結構),傳動機構的速比不小于12;而如果采用內轉子結構,速比將遠大于12。
3 研制電磁作動器的關鍵技術分析
(1) 高速比減速器從動時易自鎖
作為越野車輛的懸掛系統,必須具有從動功能,主要原因在于:高速履帶車輛行駛中經常受到路面上石頭、土坎、雨裂及深坑等障礙物的強沖擊,作動器必須從動使扭桿彈簧發揮緩沖作用;電磁必須具有被動懸掛的工作模式,以降低對車載電源的依賴。但是,高速比單級減速器往往不具備互逆傳動功能。這樣,當車輪驅動作動器轉子時,會出現自鎖現象,這樣不僅會損壞變速器,也會傳遞強沖擊給車體,降低車輛平順性。
因此,設計結構緊湊、可互逆傳動的高速比減速器是發展電磁懸掛技術面臨的一大難題。
(2)慣性負載被放大
作動器為盤形結構、大轉矩對大氣隙半徑的需求,以及永磁無刷電磁裝置轉子較大的質量,使作動器具有較大的轉動慣量。一方面,慣性負載與速比平方成正比,另一方面,車輛懸掛系統具有隨機強沖擊的特點,強大的慣性負載同樣降低扭桿彈簧的緩沖作用。因此,設計大轉矩、低轉動慣量的電磁裝置,是發展電磁懸掛技術面臨的又一難題。
(3) 拉臂往復擺動引起傳動磨損問題
由于路面起伏具有隨機性,導致拉臂的運動為往復擺動,使減速器內各嚙合部件發生剛性沖擊和磨損。如何及時消除磨損間隙、提高抗沖擊能力是發展電磁懸掛技術面臨的又一難題。
4 結論
車輛的應用環境、采用的控制算法和執行元件效率的不同,導致功耗的結論也不同。大速比減速器可使電磁裝置輸出的轉矩、轉速滿足高速履帶車輛電磁懸掛控制需要,但其可靠性、耐久性成為制約電磁懸掛工程應用的瓶頸;設計低速、大轉矩電磁裝置和結構緊湊、具有互逆傳動功能的大速比減速器是研制電磁懸掛的關鍵。
[1] DEAKIN A,CROLLA D,SHOVILIN A,et al.Charlton, Power Consumption in Ride of a Combat Support Vehicle Slow-Active Suspension[C].SAE Paper 973205.
[2] Bernard Kempinski,Christopher Murphy. Technical Challenges of the U.S. Army’s Ground Combat Vehicle Program [R]. Working Paper,Series Congressional Budget Office,2012.
[3] KAJINO H,BUMA S,CHO J S,et al.The Futrue Development and Analysis of an Electric Active Suspension system [C].SAE Paper 2008-01- 0345.
[4] Koenraad Reybrouck, Bert Vandersmissen. ACOCAR: Ultimate Comfort and Safety Through the Energy-Efficient active Damping System of Tenneco [C].21st Aachen Colloquium Automobile and Engine Technology,2012:1-15.
[5] BRYANT A,BENO J,WEEKS D. Benefits of Electronically Controlled Active Electromechanical Suspension Systems (EMS) for Mast Mounted Sensor Packages on Large Off-Road Vehicles [C]. SAE Paper 2011-01-0269.
[6] The Research and Technology Organisation (RTO),All Electric Combat Vehicles (AECV) for Future Applications[R]. RTO TECHNICAL REPORT, TR-AVT-047,2004.
[7] 馮占宗,陳思忠,魏來生,等. 越野車輛可控懸掛實用控制算法及發展概述[C]. 2014年越野車技術分會學術年會論文,2014:463-472.
[8] HOOGTER F B,BENO J H,WEEKS D A. An Energy Efficient Electromagnetic Active Suspension System [C].SAE Paper 970385.
[9] Alexander Fraser. In-wheel Electric Motors [C].Protean Electric Ltd,UK,2010 Annual Meeting.
An Analysis on the Contradiction Between Power Demand and Supply of Electromagnetic Suspension in High Speed Tracked Vehicles
Feng Zhanzong, Wei Laisheng, Yin Yunbao, Fan Weiguang & He Lipeng
ChinaNorthVehicleResearchInstitute,Beijing100072
A calculation method of the power consumption of electromagnetic suspension is proposed, the demand-supply contradiction of electromagnetic suspension power is analyzed, and the basic structure and key techniques of electromagnetic actuator are discussed. The results indicate that the output power of electromagnetic actuator under limited space can meet the requirements of active control, but the reducer must be compact with a high gear-ratio and a function of switching to speeder when necessary in some cases, and the electromagnetic devices should have the features of low moment of inertia and high torque.
tracked vehicle; active suspension; electromagnetic actuator; power demand
原稿收到日期為2015年4月20日,修改稿收到日期為2015年6月16日。