微陀螺動力學建模與非線性分析
2016-01-18 03:24:19文永蓬,尚慧琳
振動與沖擊 2015年4期
第一作者 文永蓬 男,博士,副教授,1979月10月生
微陀螺動力學建模與非線性分析
文永蓬1,尚慧琳2
(1. 上海工程技術大學 城市軌道交通學院,上海201620; 2. 上海應用技術學院 機械工程學院,上海200235)
摘要:建立了微陀螺的動力學模型,采用多尺度方法對微陀螺的非線性模型進行求解,探討了驅動微彈性梁和檢測微彈性梁的非線性剛度對微陀螺輸出的影響規(guī)律,研究了微陀螺的帶寬在非線性剛度作用下的設計原則,結果表明:微陀螺振動系統(tǒng)的檢測靈敏度和帶寬呈反比關系;微彈性梁的非線性剛度會使得輸入角速度與檢測輸出呈非線性關系。因此,從微彈性梁的設計角度出發(fā),可根據(jù)較大的輸出或者較小的非線性要求選取合適的驅動微彈性梁;而檢測微彈性梁則需要選取較小的非線性剛度。
關鍵詞:微機電系統(tǒng);微陀螺;微彈性梁;非線性剛度
基金項目:國家自然科學
收稿日期:2013-12-19修改稿收到日期:2014-01-21
中圖分類號:O322; TP202文獻標志碼: A
Dynamic modeling and nonlinear analysis for a microgyroscope
WENYong-peng1,SHANGHui-lin2(1. College of Urban Railway Transportation, Shanghai University of Engineering Science, Shanghai 201620, China; 2. School of Mechanical Engineering, Shanghai Institute of Technology, Shanghai 200235, China)
Abstract:Here, a dynamic model of a microgyroscope was built, a multi-scale method was used to solve the nonlinear model of the microgyroscope. The effects of nonlinear stiffnesses of a driving mirco elastic beam and a sensing mirco elastic beam on the output of the microgyroscope were studied. The design principles for the frequency bandwidth of the mirco-gyroscope with nonliear stiffnesses were studied. The results showed that for the vibration system of the microgyroscope, its detection sensitivity is inversely proportional to its frequency bandwidth; the input angular velocity has a nonlinear relationship with the detection output due to the nonlinear stiffnesses of mircromachined elastic beams of the microgyroscope; therefore, in the view of the design of mirco elastic beams, an appropriate driving micro elastic beam is selected according to the larger output or smaller nonlinear requirements; the sensing mirco elastic beam needs to choose a smaller nonlinear stiffness.
Key words: micro-electro-mechanical systems; mircrogyroscope; mircromachined elastic beam; nonlinear stiffness
采用微電子機械加工技術制備的振動式微陀螺是一種用來測量物體旋轉角速度的傳感器,其特征尺寸一般在微米級,具有體積小、重量輕、功耗低等特點,廣泛應用于航空航天機載設備、狀態(tài)檢測以及姿態(tài)調控等方面[1-3]。
微陀螺的設計中,為了獲得高性能和高穩(wěn)定性,設計人員格外注重靈敏度和帶寬的匹配[2]。設計新型的彈性梁用以調節(jié)驅動和檢測微彈性梁的剛度是常用的一種方法[3],它使得驅動模態(tài)和檢測模態(tài)的固有頻率足夠接近或保持一定的距離,這樣獲得高靈敏度或高穩(wěn)定性。無論是高靈敏度和高穩(wěn)定性設計,理論上往往忽略系統(tǒng)的非線性影響,造成完全按照線性理論進行的測量常常不精確[4]。隨著研究的深入,很多學者越來越關注微陀螺的非線性問題[5-7]。Tsai等[8]指出微陀螺的非線性能夠改變系統(tǒng)共振頻率,從而對系統(tǒng)的穩(wěn)定性產(chǎn)生影響。陳志勇等[9]認為要避免或降低非線性振動對諧振器正常工作狀態(tài)的影響,應盡量降低諧振器彈性特性的非線性度。李欣業(yè)等[10]考慮具有剛度非線性的微陀螺系統(tǒng),對系統(tǒng)施加時滯位移和速度反饋控制,發(fā)現(xiàn)時滯反饋控制對系統(tǒng)動力學行為存在本質影響。上述研究里,對于微陀螺非線性振動的問題,目前還是集中在理論分析方面,討論了非線性對系統(tǒng)動力學行為的影響,但所得到的研究結論尚不能直接指導設計。如何充分考慮非線性的影響從而應用到微陀螺的設計方面,尤其是非線性下的彈性梁的設計,有關的研究報道并不多。
將微陀螺的線性振動模型和考慮了非線性剛度的動力學模型進行對比分析,討論系統(tǒng)帶寬和靈敏度關系,研究非線性剛度作用下輸入和輸出的關系,從設計的角度,提出驅動微彈性梁、檢測微彈性梁各自的設計要求。
1微陀螺模型和線性化分析
考慮一類典型的梳齒型振動式微陀螺[11](見圖1),該模型把微陀螺簡化為具有兩個自由度的剛體。這個剛體振動系統(tǒng)有兩個相互垂直的振動模態(tài):一個是質量塊沿x方向的振動,稱為驅動模態(tài);另一個是質量塊沿y方向的振動,它是科氏效應引起的諧振,稱為檢測模態(tài)。振動式微陀螺的工作就是將驅動模態(tài)能量轉換到檢測模態(tài)。由于此類微陀螺檢測方向和驅動方向的阻尼均為滑膜阻尼,這里假設阻尼為線性,重點考慮非線性剛度對其振動系統(tǒng)動力學行為的影響。
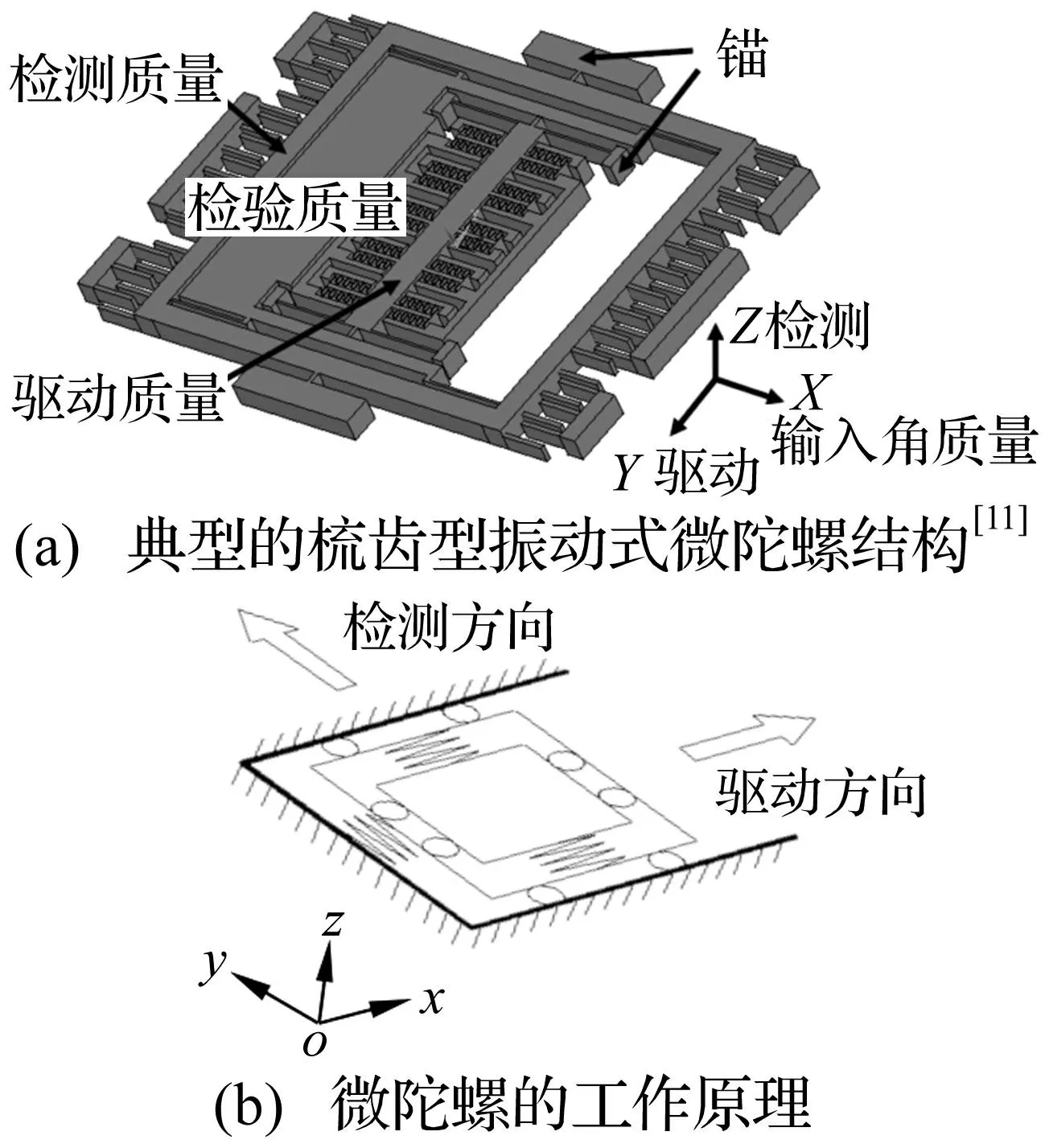
圖1 微陀螺的簡化動力學模型 Fig.1 A simplified dynamic model of mircrogyroscope
微陀螺工作時受x方向驅動力的作用,若外界繞x軸、y軸和z軸分別有角速度Ωx、Ωy和Ωz旋轉時,微陀螺在x-y平面內的兩自由度剛體計算模型的動力學方程:
(1)

(2)
(3)
當kc=0,kq=0時,式(3)退化為線性系統(tǒng):
(4)
這也是眾多文獻中通常采用的微陀螺分析模型[1-2,11-14]。
在小阻尼條件下,解方程(4)中的第一式,可得到驅動方向的穩(wěn)態(tài)解:
x=Adsin(ω0t-ψd),
(5)
式中:
將式(5)代入線性化系統(tǒng)式(4)的第二式,得到檢測方向的穩(wěn)態(tài)解:
y=Ascos(ω0t-ψd-ψs)
(6)
式中:
綜合式(5)和式(6),可得到線性化系統(tǒng)式(4)中檢測方向幅值與設計參數(shù)之間的關系:
(7)
由于“靈敏度”表征的是微陀螺系統(tǒng)對外界輸入的敏感程度,靈敏度越大表明陀螺越容易受到外界影響,通常可以用單位角速度輸入引起的微陀螺在檢測方向上幅值As的大小來表示靈敏度S,即:
(8)
由于“帶寬”是指陀螺能夠精確測量輸入角速度的頻率范圍,通常以標度因子在3 dB點處的帶寬來表示,帶寬越大表明陀螺的動態(tài)響應能力越強。根據(jù)帶寬的定義,可以得到微陀螺的頻率響應帶寬表達式:
BW=0.54|ωs-ω0|
(9)
由式(9) 可知,微陀螺工作帶寬BW與驅動頻率ω0和檢測模態(tài)固有頻率ωs的匹配相關,與驅動頻率ω0和驅動模態(tài)的固有頻率ωd的匹配無關。但是,為了要獲得較大的驅動響應和檢測響應,驅動頻率ω0一般取ωd。

圖2 微陀螺帶寬BW與靈敏度S的關系圖 Fig.2 Relationship between bandwidth and sensitivity of micro gyroscope
不計剛度非線性的情況下,微陀螺帶寬BW與靈敏度S的關系見圖2。由圖2 (a)可知,外界激勵驅動頻率ω0取ωd時,外界輸入角速度Ωz與檢測位移幅值As呈線性關系,該曲線的斜率即為靈敏度,隨著帶寬BW的增大,靈敏度下降。由圖2 (b)可知,外界輸入角速度Ωz為定值,當驅動模態(tài)固有頻率ωd與檢測模態(tài)固有頻率ωs不相等時,在頻域上有兩個峰值,當驅動頻率ω0等于驅動模態(tài)固有頻率ωd或檢測模態(tài)固有頻率ωs時,靈敏度較大;當驅動模態(tài)固有頻率ωd與檢測模態(tài)固有頻率ωs相等時,在頻域上僅有一個峰值,靈敏度最高,但此時帶寬為0;帶寬BW從0、30 Hz、46 Hz增寬到62 Hz,靈敏度S在檢測模態(tài)和驅動模態(tài)分別都降低。因此,可以認為帶寬與靈敏度成反比關系,微陀螺要同時具有高靈敏度和高穩(wěn)定性,它的驅動模態(tài)固有頻率ωd和檢測模態(tài)固有頻率ωs必須有偏差。
在驅動模態(tài)固有頻率ωd和檢測模態(tài)固有頻率ωs偏差相等時,同時增大阻尼時,線性系統(tǒng)式(4)的幅頻特性見圖3。由圖3可知,無論如何改變系統(tǒng)阻尼,均不影響帶寬BW,隨著驅動模態(tài)和檢測模態(tài)的阻尼增大,驅動模態(tài)和檢測模態(tài)處同時靈敏度減小,當增大到某值時,驅動模態(tài)和檢測模態(tài)處的靈敏減小到幾乎相等,雖然能獲得大帶寬,但靈敏度幾乎為0,系統(tǒng)對外界輸入響應過低,并且,檢測模態(tài)cs的阻尼增大的倍數(shù)較驅動模態(tài)的阻尼cd小時,檢測模態(tài)處靈敏度減小的速度會較驅動模態(tài)處靈敏度減小的速度慢。因此,在固定帶寬下的靈敏度設計中,應盡可能的減小驅動模態(tài)的阻尼cd和檢測模態(tài)的阻尼cs,尤其需要減小檢測模態(tài)的阻尼cs
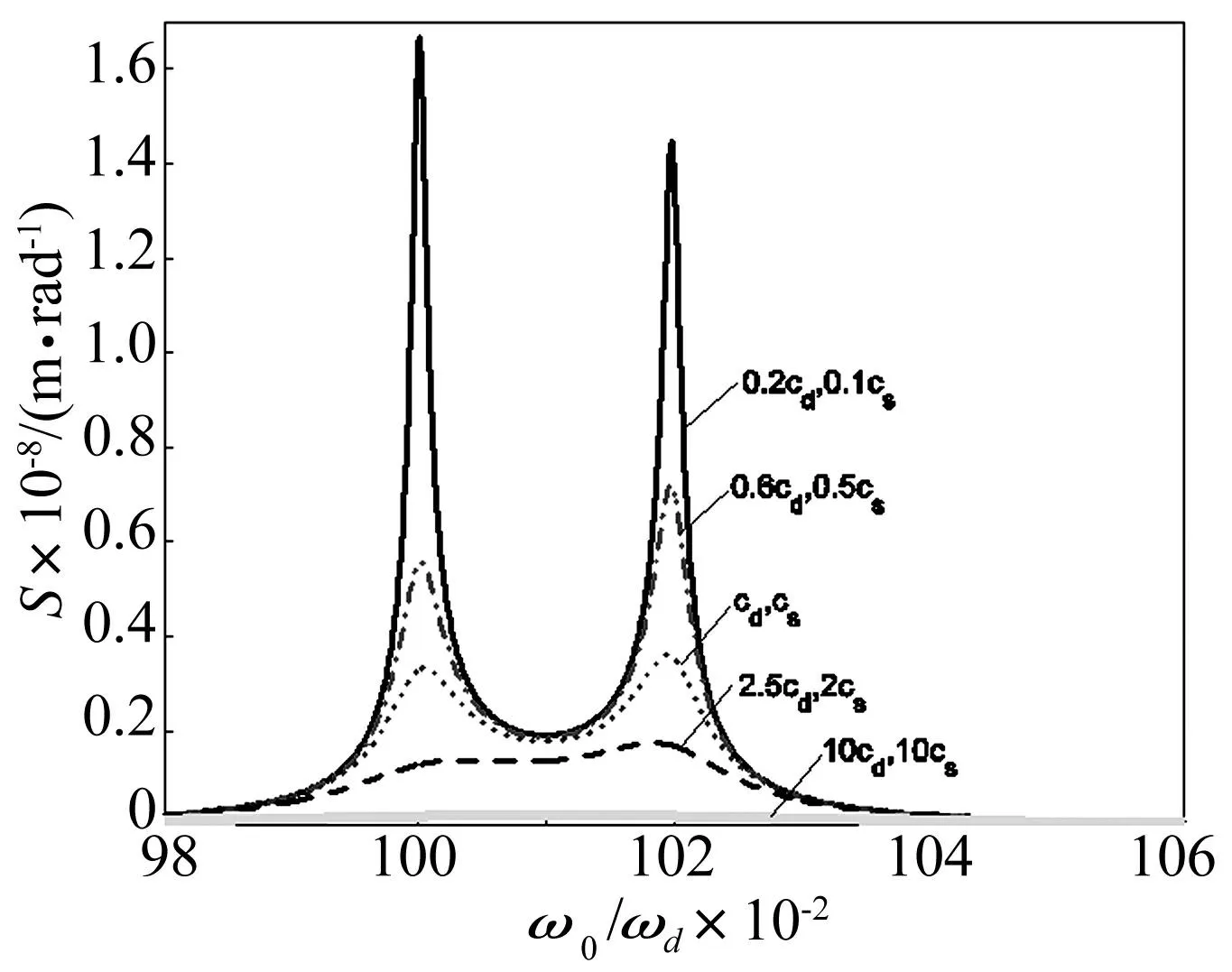
圖3 阻尼的改變對靈敏度S的 影響關系圖(BW=30 Hz) Fig.3 The damping effect on the sensitivity with BW=30 Hz
2模型的非線性分析
在考慮微陀螺的剛度非線性時,考察系統(tǒng)式(3)。首先將系統(tǒng)式(3)進行無量綱化,設

則系統(tǒng)式(3)成為
(10)
為得到系統(tǒng)式(10)的近似周期響應,可運用多尺度法,設

T0=t,T1=εt,…,
x(t,ε)=X0(T0,T1)+εX1(T0,T1)+O(ε2),
則式(10)的第1式成為

(11)
因此,
(12)
代入式(11),比較長期項eiω0T0的系數(shù)得到:
(13)
令等式(13)右端為0,則可以求解A和φ。由此可知
x(t,ε)≈Acos(ω0t+φ)
(14)
(15)
將式(14) 代入式(10)的第二式得到
由于A=A(T1),因此仍可以設
同理得到:
(16)
令等式(17)右端為0,則得到檢測方向的周期解
y≈-Bsin(ω0T0+ψ)
(18)

(19)
根據(jù)式(15)和(19),檢測振幅B為Ωz的非線性函數(shù),其非線性程度取決于檢測剛度非線性系數(shù)kq和驅動剛度非線性系數(shù)kc。
由于系統(tǒng)檢測方向的彈性力為
F=ksy+kqy3=(ks+kqy2)y
(20)

外界輸入角速度Ωz隨檢測位移幅值B的變化見圖4,二者之間不再呈線性關系,造成按照線性理論計算出的角速度不夠精確,同時系統(tǒng)的靈敏度不再是一固定值,而是隨著Ωz的變大逐漸變小 。
隨著驅動微彈性剛度非線性系數(shù)kc的增大,檢測振幅B下降,并且其非線性程度下降。kc取值在[1,1010]的范圍內, 檢測振幅B受到影響的較小。因此,驅動微彈性非線性剛度對檢測振幅的耦合影響比較低,設計微陀螺的驅動微彈性梁時,可以選取驅動微彈性非線性剛度較大的微彈性梁,這樣會獲得較大的系統(tǒng)輸出響應,或者選取驅動微彈性非線性項較小的微彈性梁,盡管響應偏小但是這樣可以獲得趨于線性的系統(tǒng)輸出。
同時,隨著檢測剛度非線性系數(shù)kq的增大,檢測振幅B下降,并且其非線性程度升高(見圖5)。因此,設計微陀螺的彈性梁時,從獲得較大的系統(tǒng)輸出響應以及線性輸出的角度考慮這兩個方面考慮,都應該盡量避免檢測微彈性梁較大的剛度非線性,尤其是要確保檢測位移不要超過彈性范圍,這與非線性剛度作用下驅動微彈性梁的設計是不同的。
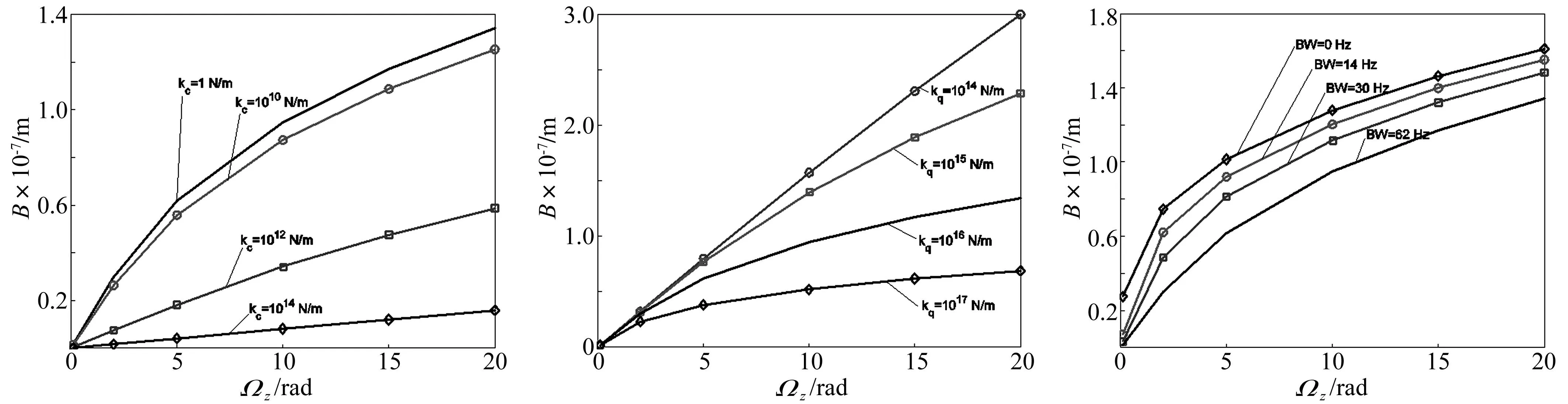

圖4 當ω0=ωd,BW=62,kq=1016時,系統(tǒng)輸出隨驅動梁剛度非線性系數(shù)kc的變化Fig.4Theoutputofthesystemvarieswithkcwhenω0=ωd,BW=62,andkq=1016圖5 當ω0=ωd,BW=62,kc=1時,系統(tǒng)輸出隨檢測梁剛度非線性系數(shù)kq的變化Fig.5Theoutputofthesystemvarieswithkqwhenω0=ωd,BW=62,andkc=1圖6 當ω0=ωd,kc=1,kq=1016時,系統(tǒng)輸出隨帶寬的變化Fig.6Theoutputofthesystemvarieswithbandwidthwhenω0=ωd,kc=1,andkq=1016
而根據(jù)帶寬對系統(tǒng)式(3)的輸出的影響規(guī)律發(fā)現(xiàn),與線性系統(tǒng)類似,隨著帶寬的增大,靈敏度下降(見圖6)。根據(jù)圖6,系統(tǒng)的靈敏度和輸入角度速度呈非線性關系,當Ωz=0.1時,零帶寬的輸出明顯高于有一定帶寬值的輸出,這說明非線性剛度會造成在零角速度附近系統(tǒng)相對大的輸出,即出現(xiàn)明顯的零點漂移,這非常不利于檢測。因此,在設計微陀螺帶寬的時候,雖然零帶寬會帶來較高的輸出,但是,從非線性剛度對系統(tǒng)的影響角度看,應該盡量避免零帶寬,一般選取一定的帶寬以便減少零點漂移,提高系統(tǒng)測量精度。
3結論與討論
針對一類典型的梳齒型振動式微陀螺,通過建立微陀螺的線性和非線性振動模型,對比線性模型和非線性模型的系統(tǒng)輸出和輸入之間的關系,獲得如下結論:
(1) 無論線性模型還是非線性模型,微陀螺振動系統(tǒng)的檢測靈敏度和帶寬都呈反比關系;
(2) 微彈性梁的非線性剛度使輸入角速度與檢測輸出呈非線性關系,檢測微彈性梁剛度的非線性系數(shù)在1016數(shù)量級時,系統(tǒng)的非線性程度明顯增強,因此,為了精確測量的要求,必須考慮系統(tǒng)的非線性。
(3) 從微彈性梁的設計角度來看,驅動微彈性非線性剛度對檢測振幅的耦合影響比較低,可根據(jù)較大的輸出或者較小的非線性需要選取合適的驅動微彈性梁;而檢測微彈性梁則需要選取較小的非線性剛度,確保檢測位移不要超過彈性范圍。
考慮到微彈性梁的非線性剛度的影響,為了減小零點漂移,微陀螺的帶寬必須非零。這有別與以往在高靈敏度設計方面的一些認知,這一點是令人感興趣的。此外,微機械陀螺的工作環(huán)境常置于空氣中,由此空氣阻尼中的壓膜阻尼和滑膜阻尼引起的非線性效應也是影響器件動態(tài)性能和穩(wěn)定性的重要因素。討論不同拓撲結構下的微機械陀螺的非線性阻尼對陀螺靈敏度和穩(wěn)定性方面的影響,以及阻尼非線性和剛度非線性以及非線性靜電力等因素對微陀螺諧振系統(tǒng)的動力學行為的耦合作用,將成為我們下一步的工作目標。
參 考 文 獻
[1] 王喆垚. 微系統(tǒng)設計與制造 [M]. 北京:清華大學出版社,2008.
[2] Bao Min-hang. Analysis and design principles of MEMS devices [M]. Holland: Elsevier press, 2005.
[3] 文永蓬, 王安麟, 姜濤, 等. 音叉振動式微機械陀螺彈性梁的研究 [J]. 高技術通訊, 2008, 18(12):1274-1279.
WEN Yong-peng, WANG An-lin, JIANG Tao,et al. Study on tuning fork vibratory microgyroscope spring beams[J]. Chinese High Technology Letters, 2008, 18(12):1274-1279.
[4] Francesco B, Ferruccio R. Nonlinear dynamics of vibrating MEMS[J]. Sensors and Actuators A, 2007, 134: 98-108.
[5] 孟光, 張文明. 微機電系統(tǒng)動力學 [M]. 北京:科學出版社, 2008.
[6] 尚慧琳, 文永蓬.一類靜電驅動微結構諧振傳感器的吸合不穩(wěn)定性研究及控制[J]. 振動與沖擊, 2013, 32(15):8-13.
SHANG Hui-lin, WEN Yong-peng. Pull-in stability of electrostatically actuated MEMS resonant sensor and its control [J]. Journal of vibration and shock,2013, 32(15):8-13.
[7] 尚慧琳, 文永蓬. 軟彈簧Duffing 系統(tǒng)的安全盆侵蝕及其時滯位移反饋控制[J]. 振動與沖擊, 2012, 31 (8):11-15.
SHANG Hui-lin, WEN Yong-peng. Erosion of safe basins in a softening duffing system and its control with time-delay position feedback [J]. Journal of Vibration and Shock, 2012, 31 (8):11-15.
[8] Tsai N C, Sue C Y. Stability and resonance of micro-machined gyroscope under nonlinearity effects [J]. Nonlinear Dynamics, 2009, 56:369-379.
[9] 陳志勇,周斌,張嶸.微機械角振動諧振器在低氣壓下的非線性振動[J].儀器儀表學報, 2010, 31(11):2481-2487.
CHEN Zhi-yong, ZHOU Bin, ZHANG Rong. Nonlinear vibration ofm icromachined angular vibration resonator [J]. Chinese Journal of Scientific Instrument, 2010, 31(11):2481-2487.
[10] 李欣業(yè),張利娟,張華彪.陀螺系統(tǒng)的受迫振動及其時滯反饋控制 [J]. 振動與沖擊, 2012, 31(9):63-68.
LI Xin-ye, ZHANG Li-juan, ZHANG Hua-biao.Forcedvibration of a gyroscope system and its delayed feedback control [J]. Journal of Vibration and Shock, 2012, 31(9):63-68.
[11] Liu X S, Yang Z C, Chi X Z, et al. A doubly decoupled lateral axis micromachined gyroscope[J].Sensors and Actuators A: Physical, 2009,154(2):218-223.
[12] 陳永. 基于滑膜阻尼效應的音叉式微機械陀螺研究[D]. 上海:中國科學院上海微系統(tǒng)與信息技術研究所, 2004.
[13] Said E A, Kanber M S, Tayfun A. A low-cost rate-grade nickel microgyroscope[J]. Sensors and Actuators A, 2006, 132:171-181.