陸軍合成分隊中偵察無人機的機動仿真研究
2015-12-23 07:44:24張偉,何天鵬
兵器裝備工程學報 2015年9期
關鍵詞:無人機
【裝備理論與裝備技術】
陸軍合成分隊中偵察無人機的機動仿真研究
張偉a,何天鵬b
(裝甲兵工程學院a.科研部;b.軍政部,北京100072)
摘要:對陸軍合成分隊作戰仿真中偵察無人機的機動仿真問題展開了研究,對該仿真過程中存在的基本問題進行了邏輯分析與算法設計。分析了偵察無人機在陸軍合成分隊作戰中的主要任務,以及機動模型與其他模型間的交互關系,對其飛行過程進行了離散化模擬,重點對轉彎算法、繞行算法以及掃描偵察飛行算法進行了設計,并對算法設計進行了實驗驗證。驗證結果表明,模擬結果符合實際情況和仿真要求,為陸軍合成分隊中其他飛行器的機動仿真研究提供了有益的參考。
關鍵詞:無人機;機動模型;裝備仿真
收稿日期:2015-04-20
作者簡介:張偉(1971—),男,博士,副教授,碩士研究生導師,主要從事裝備作戰仿真研究;何天鵬(1983—),男,碩士研究生,講師,主要從事裝備作戰仿真研究。
doi:10.11809/scbgxb2015.09.002
中圖分類號:TP391.9;TJ8
文章編號:1006-0707(2015)09-0005-06
收稿日期:2015-04-22
基金項目:國家863計劃資助項目(2009AA04Z167);遼寧省自然科學基金 (201102182)
本文引用格式:張偉,何天鵬.陸軍合成分隊中偵察無人機的機動仿真研究[J].四川兵工學報,2015(9):5-9.
Citationformat:ZHANGWei,HETian-peng.StudyofManeuverSimulationofReconnaissanceUAVofComposedCombatUnitofArmy[J].JournalofSichuanOrdnance,2015(9):5-9.
StudyofManeuverSimulationofReconnaissanceUAVof
ComposedCombatUnitofArmy
ZHANGWeia, HE Tian-pengb
(a.ScientificResearchDepartment;b.MilitaryandPoliticalDepartment,
AcademyofArmoredForceEngineering,Beijing100072,China)
Abstract:The intention of this paper is to make a study on the maneuver simulation of reconnaissance UAV in the combat simulation of composed combat unit of army, make logical analysis and algorithm design on the essential issue of the process of the maneuver simulation. This study analyzed the task of the reconnaissance UAV of composed combat unit of army in operations, and the interaction between maneuver model and other models, and made discrete simulation of the process of the fight. This study put an emphasis on the design of turning algorithm, detour algorithm and reconnoiter maneuver algorithm, and made an experimental verification on them at last. According to the result of the verification, the result of simulation is accordant with the practical situation and is satisfactory of the maneuver simulation. It also provides a reference for the maneuver simulation research of other aircraft of the composed combat unit of army.
Keywords:UAV;maneuvermodel;weaponrysimulation
信息化條件下武器裝備需求論證、武器裝備作戰運用方法研究、武器裝備作戰運用基礎數據研究與分隊戰術訓練方法研究,需要在方法上和技術上進行新的探索和突破。建立適應性、可擴展性、真實性和實用性強的裝備作戰仿真模型,進行分隊級作戰仿真,是解決上述問題的有效手段。陸軍合成分隊是未來信息化條件下聯合作戰地面作戰力量的發展趨勢,其主要裝備類型除主戰裝備外,還包括指揮通信裝備、偵察情報裝備及各類保障裝備。立體偵察裝備的應用,是未來信息化條件下作戰偵察的重要手段和方式。偵察型無人機因部署靈活,偵察周期較短成為未來合成分隊中的重要偵察力量。
1陸軍合成分隊作戰仿真中的偵察無人機系統
信息化條件下的作戰行動,戰斗各方對信息的依賴程度極大增強。在作戰行動中,雙方指揮員對對方高價值單元(HVU)的攻擊,及對自身高價值單元的保護,需要精確的情報信息作為輔助和支撐[1,2]。所以,包括信息在內的多維空間主動權的爭奪成為作戰各方關注的焦點。分隊級陸軍作戰力量,是未來陸軍的基本組成細胞,具有較為獨立的作戰能力、信息獲取及分發處理能力和自我保障能力,能在關鍵的作戰行動中發揮突出作用。因無人機系統減少了人在危險環境中暴露的時間,卻發揮了巨大的感知戰場環境與資源、輔助軍事決策的作用,甚至直接參與作戰行動,各國軍隊已將其作為陸軍合成分隊作戰力量的重要組成部分和提高作戰能力的法寶。
本研究中所討論的無人機系統,包括編制于陸軍合成分隊的無人機飛行器(UAV)、操作員、飛行和導航系統、地面信息處理系統等,實際上指的是能夠自主完成戰術偵察任務的作戰實體。按照其工作原理和主要作戰功能,將其分解為4個仿真模型,即無人機指揮模型、無人機機動模型、無人機偵察模型和飛行器損傷模型。圖1顯示了偵察無人機的模型組成及其內外部交互關系。
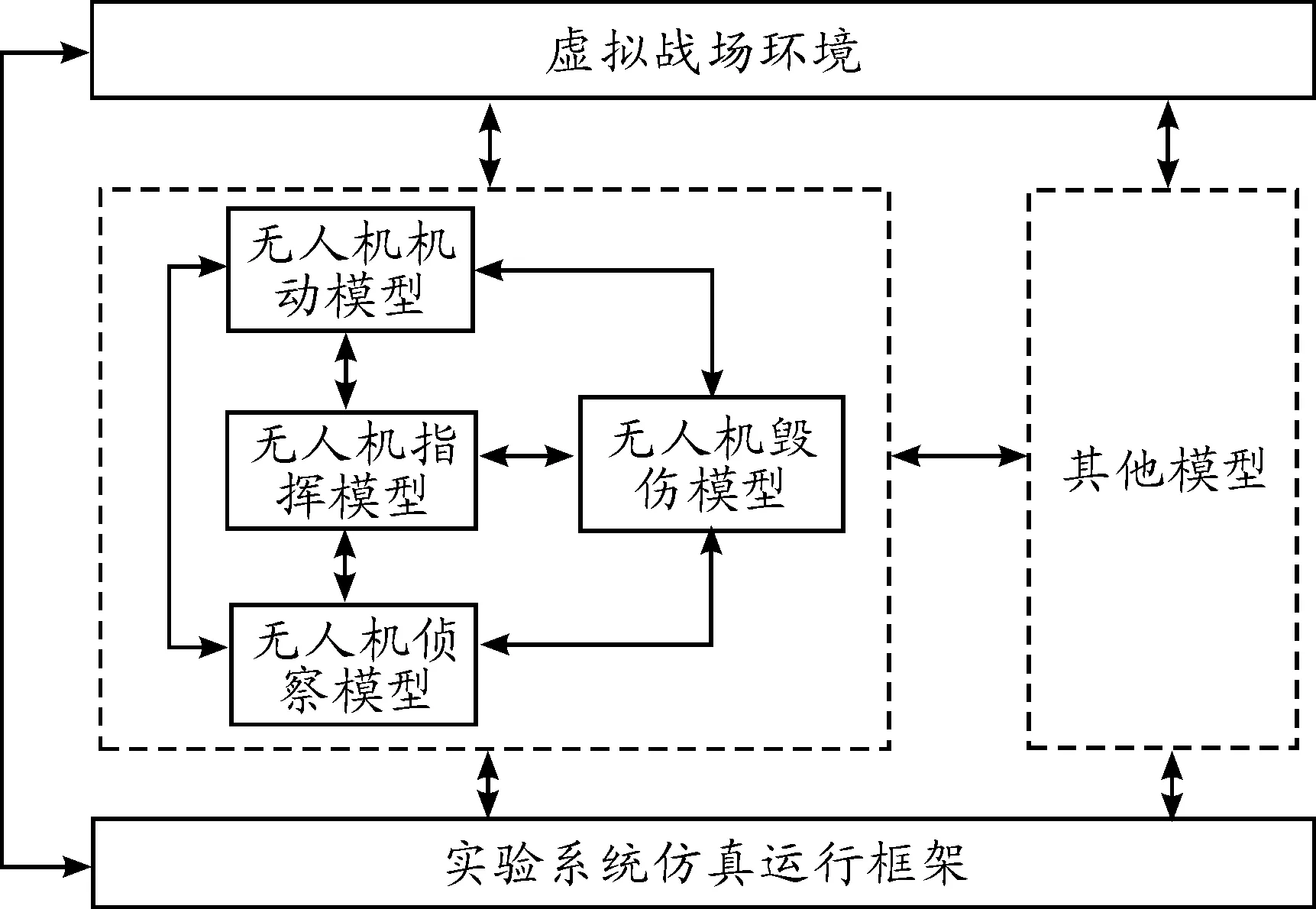
圖1 偵察無人機的模型組成及交互關系
無人機指揮模型應能夠規劃飛行器飛行路線,能夠規劃規避無法通行區域或高危飛行區域的繞行路線,并能夠在初始化函數中向無人機機動模型進行參數裝定[1,2];能夠向無人機機動模型發出更新后的程控飛行路徑任務序列,或模擬無人機操作員輸出實時的手控指令。無人機機動模型應能夠按照指揮模型規劃的程控路徑和飛行時間,自動采用巡航速度作為理想速度進行起飛、飛行、返回、回收(降落)等動作[3-6];能夠自動規劃偵察區域上空偵察掃描路線,能夠優先執行無人機指揮模型實時發出的手控指令或更新之后的程控路徑任務;能夠體現無人機性能,實時輸出六自由度姿態參數(x,y,z,α,β,γ)即三維坐標、方向角、側傾角、俯仰角,輸出相對地面的高程值;能夠實時計算續航時間和續航里程數,剩余量達到預警值時向指揮組件報告。無人機偵察模型應能根據無人機機動模型給出的實時姿態參數和相對高程[7,8],指揮模型給出的任務區域坐標,模擬無人機偵察行為,并輸出實時視點姿態參數;根據無人機性能模擬偵察結果上報與處理過程和效果。飛行器損傷模型能夠向其他模型發送飛行器損傷事件。圖2顯示了偵察無人機戰場偵察IDEF0模型的A0圖。
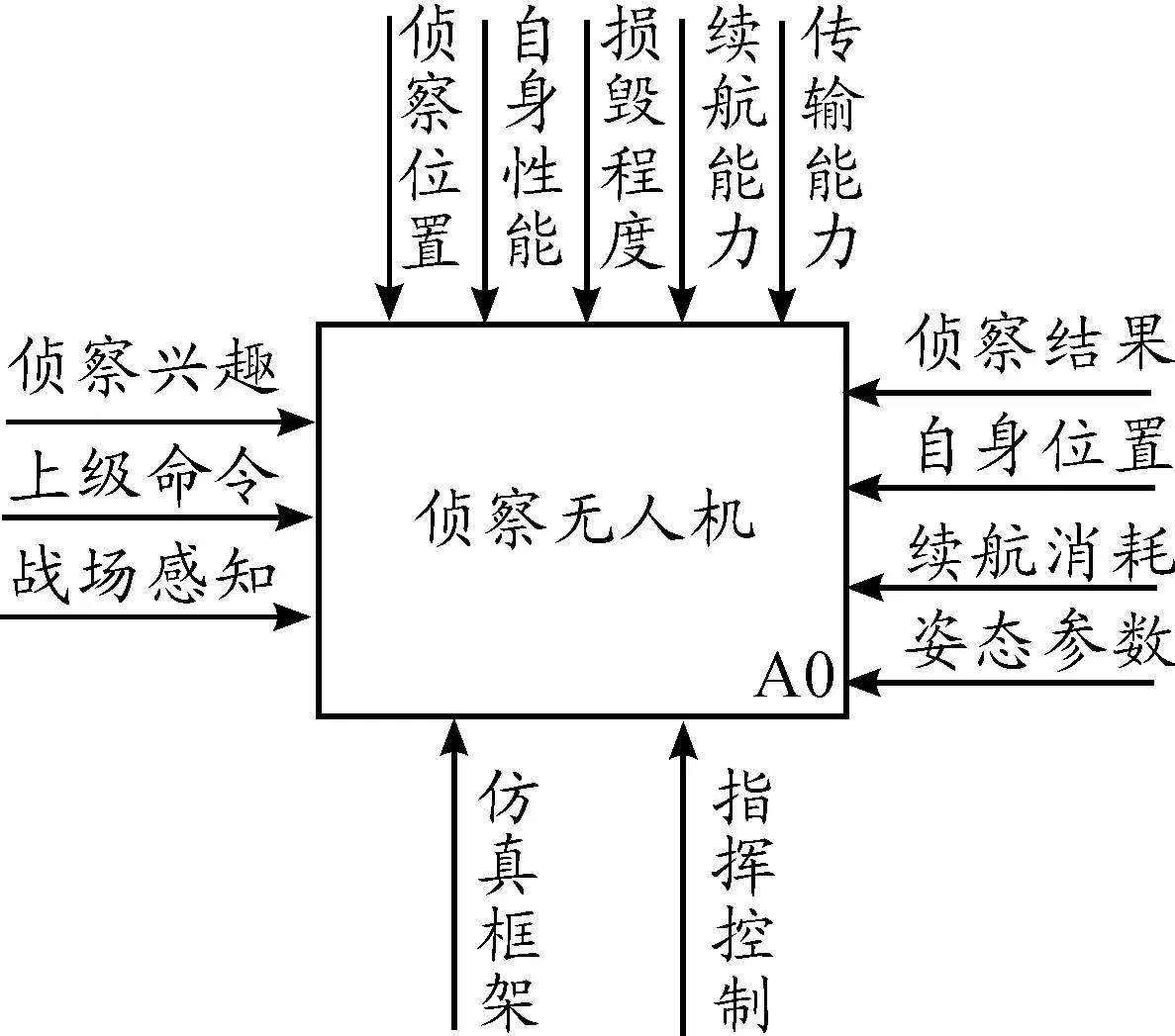
圖2 偵察無人機戰場偵察 IDEF0模型 A0圖
2偵察無人機機動任務參數
偵察無人機指揮模型根據上級命令、戰場威脅,結合無人機飛行性能指標規劃出起飛位置至降落位置間最優的飛行路線,將其描述為一組導航序列點傳遞給無人機機動模型。同時,應向機動模型和偵察模型傳遞偵察區域頂點坐標,并考慮進入偵察區域的高度和飛行方向。
無人機飛行路線的確定,需要考慮多種因素的影響,是一個十分復雜的過程[9-13]。飛行路線可用導航點NAV[n]表示。起點S、目標點T加上每一個轉向點組成了導航點坐標序列{S,NAV[1],NAV[2],NAV[3],…NAV[n],T}。指揮模型須將導航點序列、偵察區域頂點坐標、起飛時間作為無人機機動必要參數傳遞給機動模型。
3偵察無人機機動模型
偵察無人機的機動,可以按照無人機指揮模型在起飛前預定的導航點序列實施,也可按照地面控制單元遙控實施,或在2種模式中相互切換。其機動過程,從指令輸入輸出過程來看,是非線性過程;從其空間位置和姿態變化過程來看,是線性過程。在建立其機動模型的過程中,應注意把握離散的導航點上無人機位置和姿態隨仿真時間推進而產生的線性變化過程。
假設某時刻無人機姿態為Posture1,到達下一導航點時姿態為Posture2,這個過程中經過了一系列連續的變化Maneuver(P)。其中P反映了變化過程中的各種機動參數。
3.1初始化階段
在初始化階段,模型讀取裝備參數文件,將相關性能參數初始化。而后,機動模型接收指揮模型傳遞的飛行命令參數,主要是程控飛行路徑參數、偵察區域坐標、起飛姿態和起飛時間等。同時,機動組件計算總飛行路程,驗證無人機執行任務能力。根據起飛姿態,計算起點至第一導航點是否超過最小起飛距離,即能否在該距離內爬升至預定高程。若不能,則應規劃出盤旋上升路線。然后觸發起飛事件。
3.2飛行階段
飛行過程包括起飛階段,巡航階段與降落階段。模型將飛行過程離散化為一定仿真步長的定時事件序列。定時事件主要執行速度計算、方位角計算、側傾角和俯仰角計算事件,其中速度計算包括水平方向速度計算和垂直方向速度計算。這些計算的主要依據是飛行導航點序列和各類事件導航點序列。事件導航點包括除飛行導航點外的轉彎導航點、繞行導航點、偵察區域掃描飛行導航點。這些事件導航點的執行主要由定時事件根據相應條件觸發,由角度計算函數檢測本無人機已通過最后一個導航點后結束。另外,定時事件還應檢查臨時手控命令、新的飛行任務事件、飛行器損傷狀態、剩余續航里程、剩余續航時間、降落事件并做出相應響應,同時應向偵察模型輸出無人機位置、姿態和視角參數。其具體執行步驟如圖3所示。
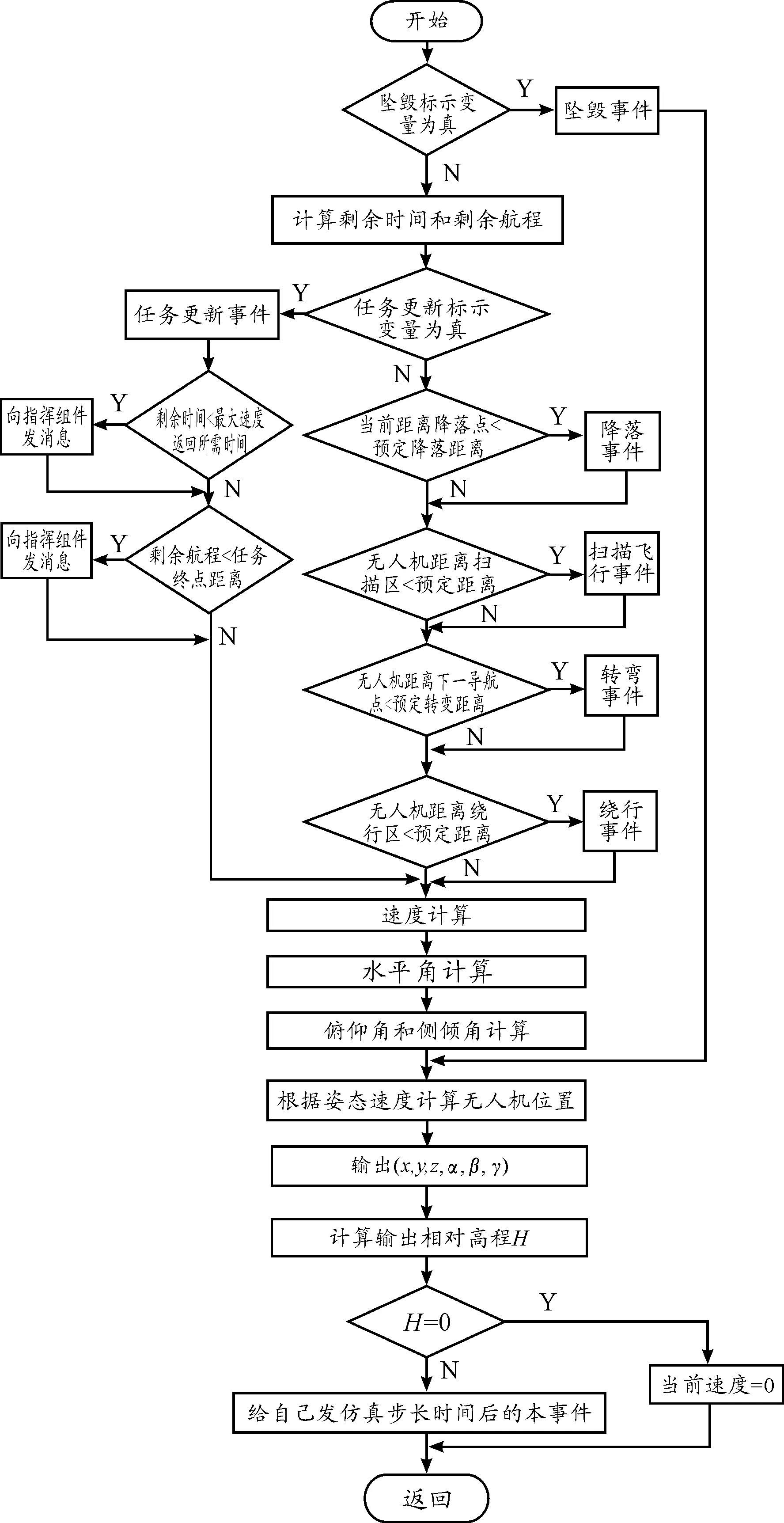
圖3 飛行階段定時事件流程
3.3繞行事件
無人機在飛行過程中,存在影響飛行器飛行的地形地貌和氣象因素,以及影響飛行的電磁干擾,加之敵方防空火力的打擊威脅等,使無人機機動模型必須檢查飛行區域中是否有上述不可通行區域。該區域位置以圓心加半徑的參數形式由仿真支撐環境提供。當飛行路線穿越該區域時,模型應自動計算出繞行路線,并以繞行導航點序列的形式存儲記錄,計算飛行總距離,驗證無人機執行任務的能力,規劃飛行速度、繞行時機和各段路線的飛行姿態。
如圖4所示。NM為無人機機動路線上的一段,N與M是2個導航點。半徑為r的實線圓O為不可通行的障礙物范圍。設OL⊥NM,則從繞行距離最短的原則考慮,設定O點位于NM左側或在NM上時,無人機從右側繞行;O點位于NM右側時,無人機從左側繞行。繞行距離最遠的極端情況,即當圓點O位于NM上時。設繞行導航點為A、B、C、D。其中A、D位于原行進路線上,B、C位于與障礙圓O同圓心且半徑為R的大圓上,且∠AOB=∠BOC =∠COD=π/3。設無人機發現障礙距離與障礙物半徑之比為S,則有AO=OD=S×r。因OH⊥BC,則在⊿BOH中,OB長度為R,為避免與障礙物碰撞,OH長度應大于r,則有
(1)
可取
R=1.5×r
(2)
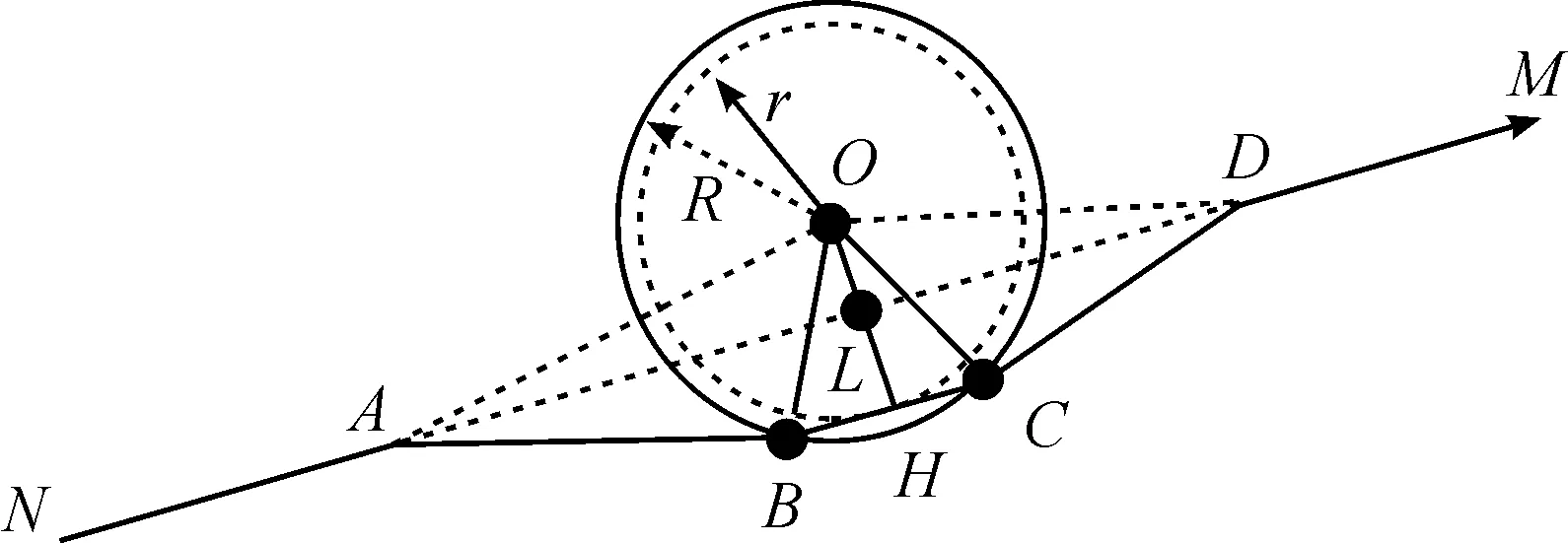
圖4 無人機繞行導航點計算示意圖
無人機在機動過程中,每次執行位置更新事件時均檢測飛行方向前固定距離處的點是否進入障礙物內部,如果進入則開始減速至繞行速度,繞行結束后加速至原有速度。當飛行至A點時,產生繞行導航點序列,觸發繞行事件。繞行導航點的計算關鍵是計算D點與B,C兩點位置。在笛卡爾坐標系中,設θ為繞行前的方向角,γ為AO的方向角(0<θ<2π,0<γ<2π),A點坐標(XA,YA)可由AO及其方向角求出,則有

(3)
D點坐標(XD,YD)
(4)
當θ≤π,θ≥γ≥0或γ>π+θ時,或當θ>π,θ>γ>θ-π時,O位于飛行線路右側,則B點坐標(XB,YB)
(5)
C點坐標(XC,YC)
(6)
當θ≤π,θ<γ<θ+π時,或當θ>π,θ<γ或γ<θ-π時,O位于飛行線路左側,則B點坐標(XB,YB)
(7)
C點坐標(XC,YC)
(8)
3.4轉彎事件
無人機在接近導航序列點時須產生轉彎事件。機動過程中,無人機每次執行位置更新事件時檢測距離下一導航點是否小于預定值,如果小于則開始減速至轉彎速度,轉彎結束后加速至原有速度。如圖5所示,無人機轉彎時,根據飛行導航點產生的夾角∠BAC,計算生成位于半徑為r的圓弧上的n+1個轉彎點序列(以4個點為例)。其中M、Q為切點,O為圓心,N、P將圓弧平均分成n+1份,(M,M1,M2,M3,M4,…Mn)為生成的轉彎點序列。設導航線路上的轉彎角∠BAC為α,轉彎弧相對的圓心角∠MOMn為β,θ為轉彎前的方向角,γ為轉完后的方向角(0<θ<2π,0<γ<2π),A點坐標為(XA,YA),則有
(9)
其中(0<α<π)
β=π-α
(10)
(11)
則M點坐標(XM,YM)
(12)
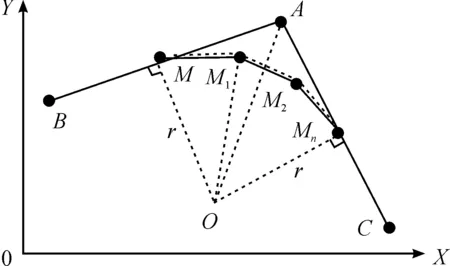
圖5 無人機轉彎導航點計算示意圖
當θ≤π,θ>γ≥0或γ>π+θ時,或當θ>π,θ>γ>θ-π時,無人機右轉,則轉彎圓心的坐標(XO,YO)
(13)
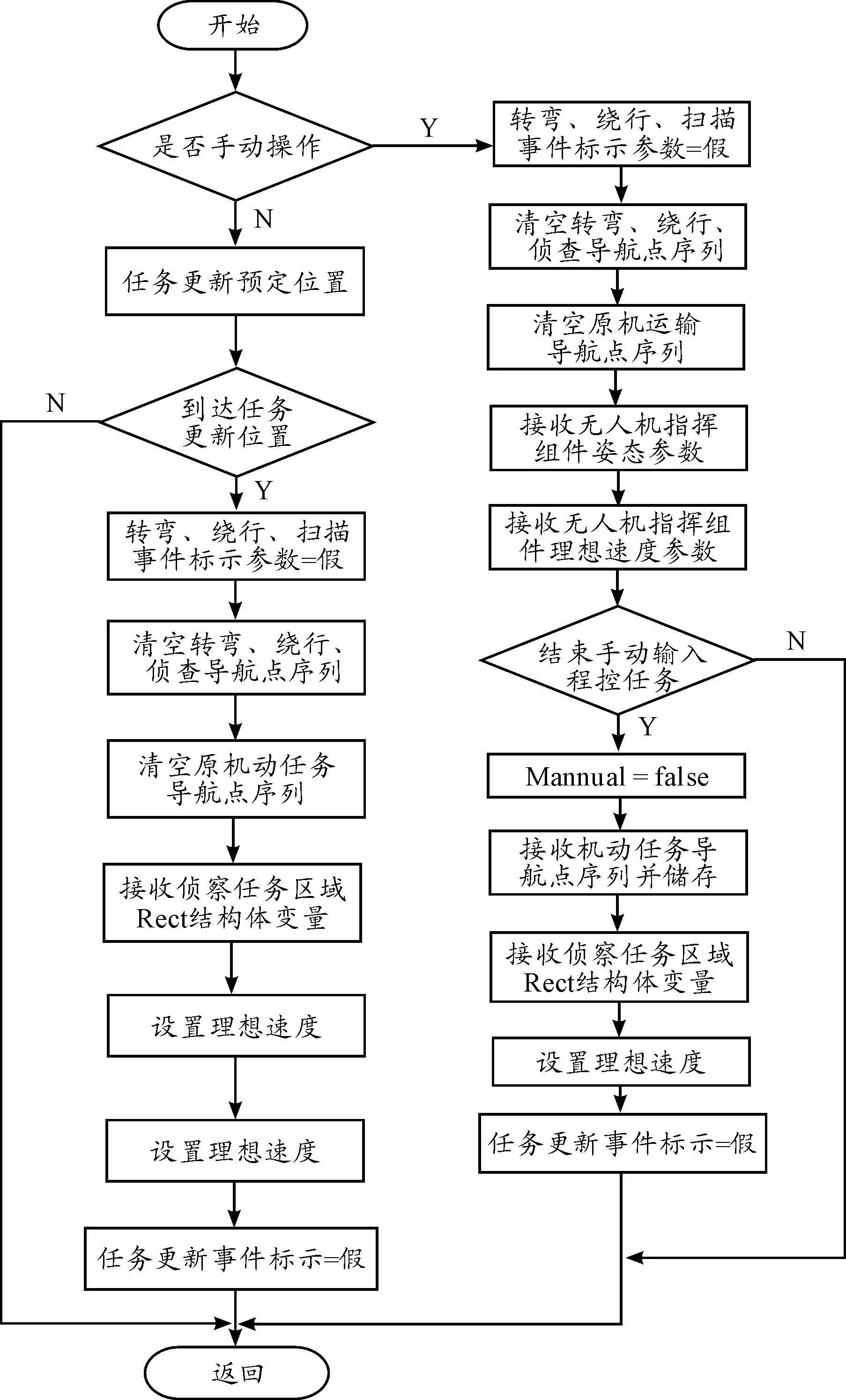
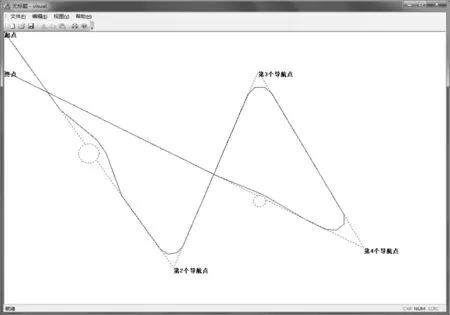
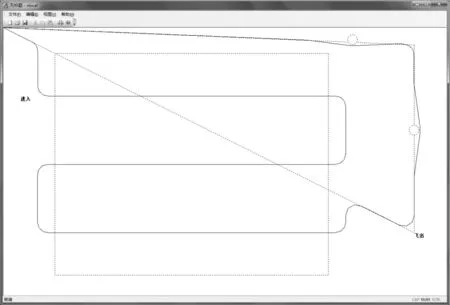
則除M外第m(0 (14) 當θ≤π,θ<γ<θ+π時,或當θ>π,θ<γ或γ<θ-π時,當無人機左轉,則轉彎圓心的坐標(XO,YO) (15) 則除M外第m(0 (16) 3.5規劃掃描路徑 偵察掃描區掃描路徑所需關鍵導航點如圖6所示。其中點1為進入區域前的調整點,無人機在此點調整方向向點2飛行。2、3為航線與進入偵察區域第一、二個交點,1、2間距離為預設值。4、5、6為轉彎點,其算法參照轉彎算法,后續各點與此相似。設偵察攝影相機感光元件感光區域邊長為L,焦距為f,掃描飛行過程中,無人機相對高程為H,則點3與點10間距離為(0.8L×H)/f,即偵察照片行間應重疊20%。掃描過程中飛機高程不變。 圖6 偵察掃描區掃描路徑示意圖 3.6任務更新事件 在無人機飛行的過程中,可能出現指揮員臨時中斷飛行任務,改為手動操作或更新飛行任務的情況,這類情況的處理主要通過任務更新事件實現,其主要執行清空事件導航點事件,更改手動飛行標示變量Manual的值,接收指揮模型傳輸的速度與姿態參數變化以實現模擬手控操作,或接收新的飛行任務點。其主要執行步驟如圖7所示。 4算法驗證與實驗結果 為驗證本研究轉彎與繞行算法,現以某偵察無人機為例,規劃出起點為(0,0,100),導航點分別為(400,-600,100)、(400,-100,100)、(850,-550,100)、(0,-100,100)的飛行路線,如圖8所示。同時,在飛行路線中設置兩障礙物分別位于路線右側和左側。圖8中虛線表示導航點連線,虛線圓表示障礙物范圍。經編程驗證,按照產生4個轉彎導航點轉彎,無人機在該轉彎時段飛行路線如圖8所示。 圖7 任務更新事件流程 圖8 無人機轉彎與繞行算法驗證 經驗證可看出,轉彎算法能夠依照轉彎導航完成轉彎動作。繞行算法能夠自行判斷障礙物大小,并選擇其與導航線路相對位置的對面以最短繞行路線實施繞行,與障礙物保持一定距離,實現了預期效果。 另一條規劃路線中穿過預定偵察區域,如圖9中所示。預定飛行路線為(0,0,100),(1 200,-600,100),(1 200,-50,100),(0,0,100)。圖9中虛線矩形表示偵察范圍,虛線表示導航點連線,虛線圓表示障礙物范圍。偵察區域2個對角坐標為(150,-75,100),(950,-725,100)。當無人機飛臨偵察區域時,模型根據偵察區域形狀規劃出進入位置和相應調整點與導航序列點,完成區域掃描飛行任務。相機掃描寬度250m,飛行航線間距離為200m,實現了照片重疊20%。當飛出掃描區域經過調整點(1 000,-600,100)時,迅速返回預定機動路線完成機動任務。 圖9 無人機偵察掃描路線規劃 5結論 本研究論述了陸軍合成分隊編制內的戰術偵察無人機機動仿真的相關模型,研究了無人機機動過程中主要事件的仿真方法,對轉彎算法、繞行算法以及掃描偵察飛行算法進行了設計。經編程實驗證明,算法初步實現了對陸軍合成分隊作戰仿真中無人機機動的仿真,模擬結果符合實際情況和仿真要求。本研究對無人機性能的模擬采取了一定程度的簡化,應在下一步研究中進一步改進完善。 參考文獻: [1]嚴建林.基于進化算法無人機航路規劃技術研究[D].南京:南京航空航天大學,2008. [2]AntoniosTsourdos,BrianWhite,MadhavanShanmugavel.無人機協同路徑規劃[M].祝小平,周洲,王懌,譯.北京:國防工業出版社,2013. [3]周劍勇,蔣自成,王躍峰.飛行器機動飛行分布式仿真系統研究[J].系統仿真學報,2011,23(11):2391-2394. [4]代冀陽,楊興廷,吳劍.無人機俯仰角程序調參控制律設計[J].計算機仿真,2013,30(1):74-77. [5]王鵬,朱元昌,邸彥強.自行高炮CGF實體智能機動行為仿真[J].計算機工程與應用,2012,48(2):227-229. [6]薛鵬,肖前貴,高艷輝.某無人機飛控系統半實物仿真平臺設計[J].現代電子技術,2012,35(13):111-118. [7]孫麗卿.無人機仿真訓練系統[J].計算機仿真,2006,23(2):44-46. [8]李浩.某型無人機飛控系統仿真平臺研究[D].南京:南京航空航天大學,2011. [9]郭齊勝,楊立功,楊瑞平.計算機兵力生成導論[M].北京:國防工業出版社,2006. [10]李京偉.多分辨率建模在航母戰斗群作戰仿真中的應用研究[J].系統仿真學報 2013,25(8):1924-1929. [11]吳森堂,費玉華.飛行控制系統[M].北京:北京航空航天大學出版社,2010. [12]張騎,尹全軍,黃柯棣.基本對象模型概念研究[J].系統仿真學報,2005,17(7):1667-1670. [13]侯波南.并行離散事件仿真概念建模技術研究[D].長沙:國防科學技術大學,2009. (責任編輯周江川)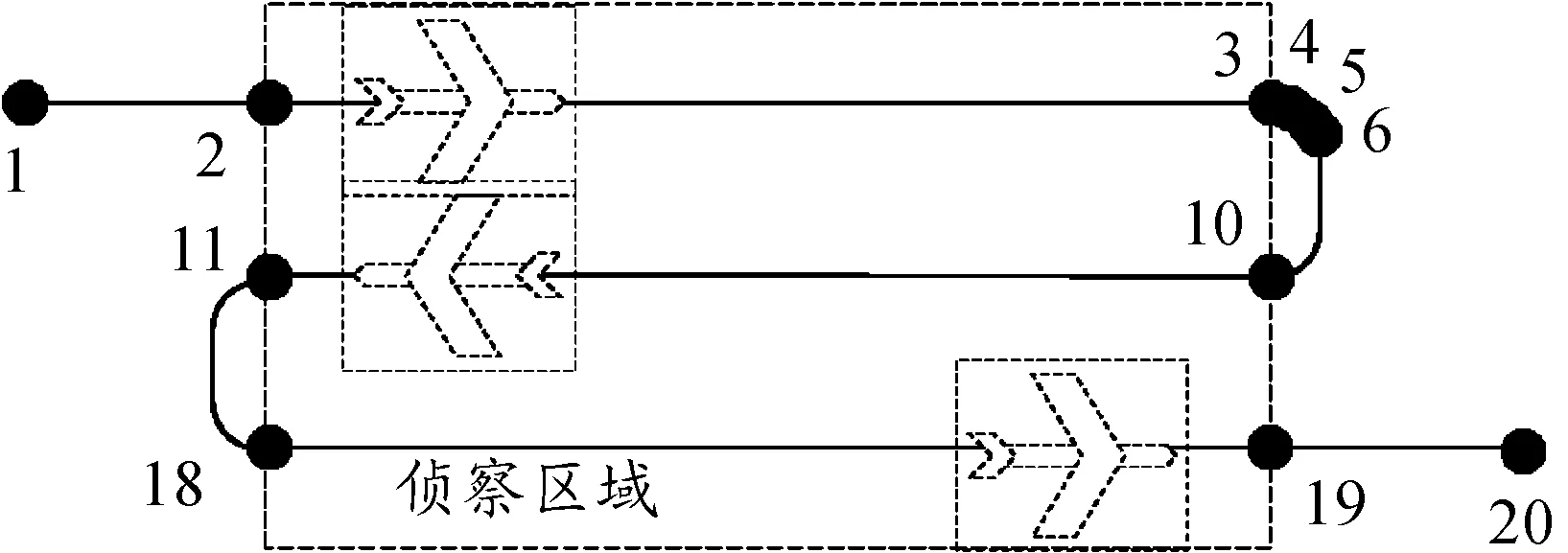
 猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32電子技術與軟件工程(2016年19期)2016-12-19 18:28:28新教育時代·教師版(2016年27期)2016-12-06 18:14:59中國科技縱橫(2016年17期)2016-11-30 11:51:57農機使用與維修(2016年10期)2016-11-10 09:45:55人間(2016年26期)2016-11-03 17:52:40中國科技博覽(2016年22期)2016-11-01 18:10:31科技視界(2016年22期)2016-10-18 14:30:27企業導報(2016年9期)2016-05-26 20:58:26
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32電子技術與軟件工程(2016年19期)2016-12-19 18:28:28新教育時代·教師版(2016年27期)2016-12-06 18:14:59中國科技縱橫(2016年17期)2016-11-30 11:51:57農機使用與維修(2016年10期)2016-11-10 09:45:55人間(2016年26期)2016-11-03 17:52:40中國科技博覽(2016年22期)2016-11-01 18:10:31科技視界(2016年22期)2016-10-18 14:30:27企業導報(2016年9期)2016-05-26 20:58:26
