基于SINGER模型的實時誤差配準(zhǔn)算法及分析
2015-08-17 11:23:44李洋,張靖
系統(tǒng)工程與電子技術(shù) 2015年6期
李 洋,張 靖
(中國電子科學(xué)研究院,北京100041)
基于SINGER模型的實時誤差配準(zhǔn)算法及分析
李 洋,張 靖
(中國電子科學(xué)研究院,北京100041)
系統(tǒng)誤差配準(zhǔn)是多平臺、多傳感器目標(biāo)跟蹤的關(guān)鍵環(huán)節(jié),可以有效地估計雷達跟蹤系統(tǒng)誤差,并進行準(zhǔn)確誤差補償。若不進行精確的系統(tǒng)誤差配準(zhǔn),則可能導(dǎo)致多平臺、多傳感器跟蹤系統(tǒng)對目標(biāo)融合跟蹤的錯誤或?qū)ν荒繕?biāo)產(chǎn)生多條航跡,從而導(dǎo)致系統(tǒng)性能惡化。給出了基于目標(biāo)SINGER運動模型的擴維卡爾曼濾波算法。通過仿真實驗分析了誤差配準(zhǔn)精度與機動頻率的關(guān)系,結(jié)論為針對不同機動頻率目標(biāo)進行雷達跟蹤系統(tǒng)的誤差配準(zhǔn)提供理論參考。
誤差配準(zhǔn);SINGER運動模型;擴維卡爾曼濾波;航跡關(guān)聯(lián)
0 引 言
近年來,多平臺、多傳感器目標(biāo)跟蹤系統(tǒng)由于其高跟蹤精度、大跟蹤范圍和高目標(biāo)發(fā)現(xiàn)概率而受到相關(guān)研究人員的重視。但跟蹤系統(tǒng)誤差在跟蹤起始階段、濾波階段和航跡關(guān)聯(lián)階段等始終存在,嚴重影響跟蹤精度和融合結(jié)果,甚至導(dǎo)致出現(xiàn)丟失目標(biāo)、產(chǎn)生虛假目標(biāo)等問題,降低跟蹤系統(tǒng)對目標(biāo)的監(jiān)視性能。所以系統(tǒng)誤差配準(zhǔn)對于形成準(zhǔn)確的目標(biāo)航跡具有重要意義,是建立清晰、一致的戰(zhàn)場態(tài)勢的重要環(huán)節(jié)[1-2]。
隨著跟蹤技術(shù)的深入發(fā)展,各種配準(zhǔn)算法相繼被提出,目前主要的配準(zhǔn)算法包括極大似然配準(zhǔn)算法、最小二乘配準(zhǔn)算法、實時質(zhì)量控制誤差配準(zhǔn)算法、擴維卡爾曼濾波算法等。而擴維卡爾曼濾波算法由于其思路清晰、運算量低等特點而在工程領(lǐng)域大量使用[3-5]。
通常在作戰(zhàn)過程中,跟蹤目標(biāo)具有機動特性。SINGER運動模型對于機動目標(biāo)跟蹤具有非常好的效果,其目標(biāo)的機動特性由機動頻率所表征。SINGER運動模型的狀態(tài)轉(zhuǎn)移表達形式也具有自身獨有的特征。本文針對目標(biāo)SINGER運動模型給出了其擴維卡爾曼濾波算法,并對系統(tǒng)誤差進行補償。分析了機動頻率對于補償精度的影響,為機動目標(biāo)跟蹤系統(tǒng)的誤差配準(zhǔn)提供理論支撐。
1 狀態(tài)與量測方程
1.1 SINGER運動模型
SINGER模型是針對加速度期望為零而建立的一階時間相關(guān)模型,其模型[6]具有如下表達形式:
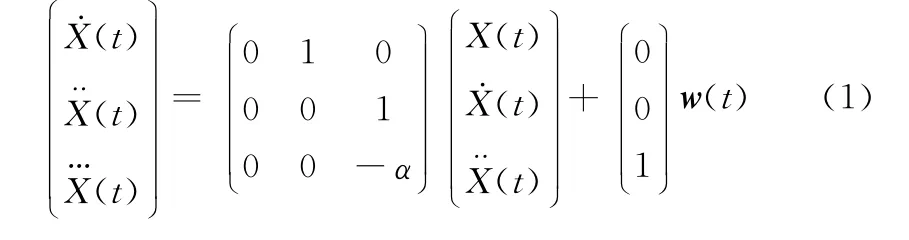
式中,α是機動時間常數(shù)的倒數(shù),通常被稱為機動頻率。機動頻率的確切值要經(jīng)過實際實時測量才能得到,一般情況下對于轉(zhuǎn)彎機動時機動頻率通常取1/60,逃避情況下機動頻率取1/20,大氣擾動取1。
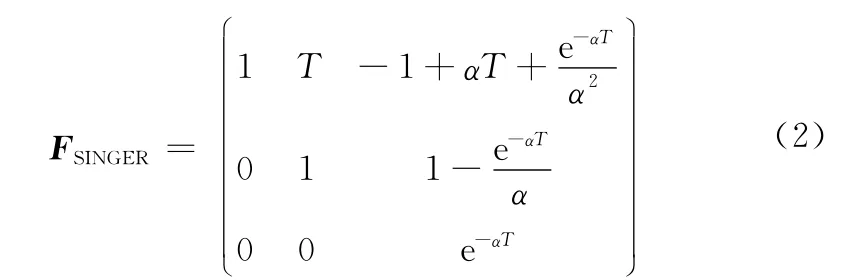
對于方程式(1)進行離散化處理,采樣間隔設(shè)為T,SINGER模型離散化后狀態(tài)轉(zhuǎn)移矩陣[7]如下所示
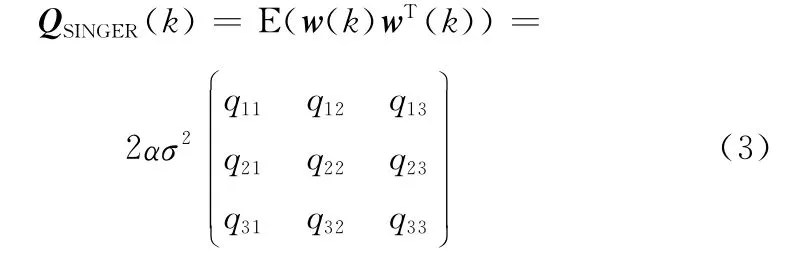
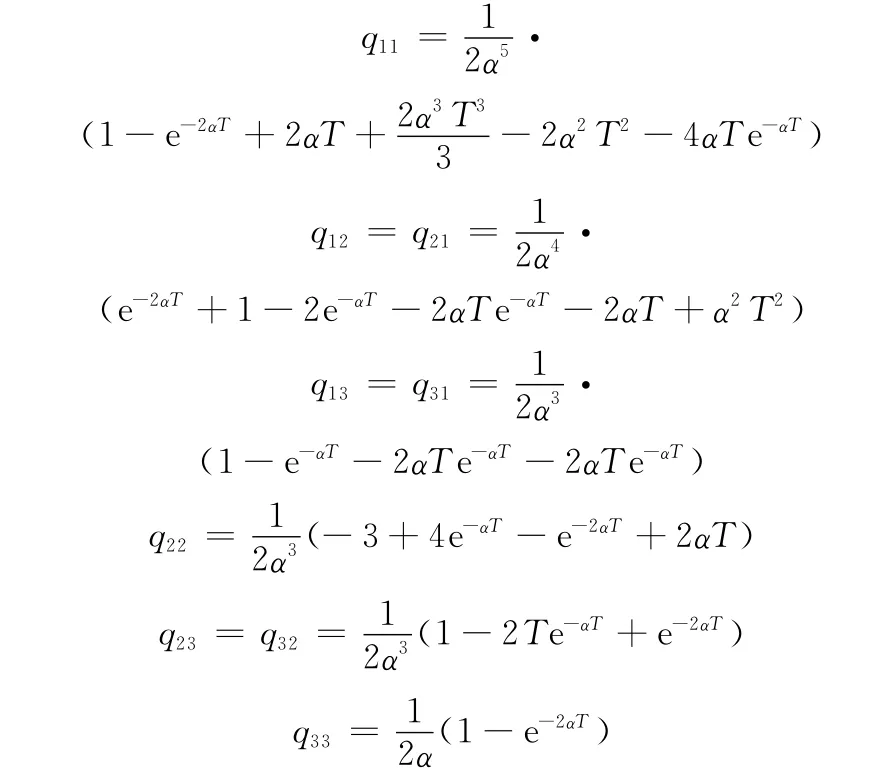
狀態(tài)轉(zhuǎn)移方程式(1)離散化后的過程噪聲協(xié)方差矩陣[]為
式中
1.2 量測方程與系統(tǒng)誤差設(shè)置
假設(shè)多平臺跟蹤系統(tǒng)包含兩部雷達,同時對一個目標(biāo)進行跟蹤。雷達在極坐標(biāo)系下進行觀測,量測數(shù)據(jù)存在距離向誤差和方位向誤差,并滿足加性噪聲的性質(zhì)。這樣在距離向和方位向系統(tǒng)誤差表示為
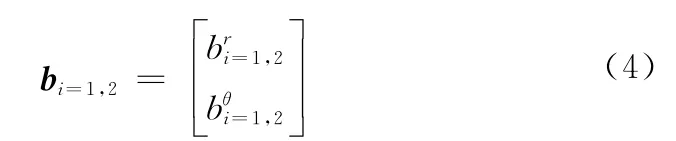
式中,i=1,2表示多平臺跟蹤系統(tǒng)傳感器標(biāo)號,上標(biāo)分別表示距離向和方位向。
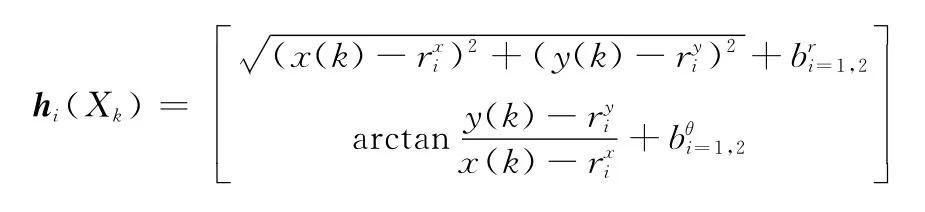
傳感器i的量測方程表示為

而將極坐標(biāo)下量測轉(zhuǎn)換為笛卡爾坐標(biāo)系下量測須將系統(tǒng)誤差和量測噪聲方差分別進行轉(zhuǎn)換,轉(zhuǎn)換方程[9]如下:
(1)系統(tǒng)誤差轉(zhuǎn)換

(2)量測噪聲方程轉(zhuǎn)換

式中
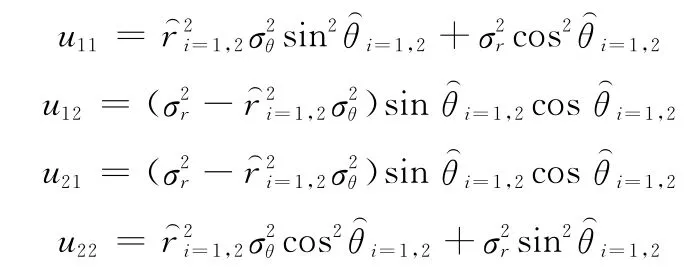
其中,σr和σθ分別表示為極坐標(biāo)系下噪聲V(k)的方差,且滿足距離向和方位向噪聲量測相互獨立。
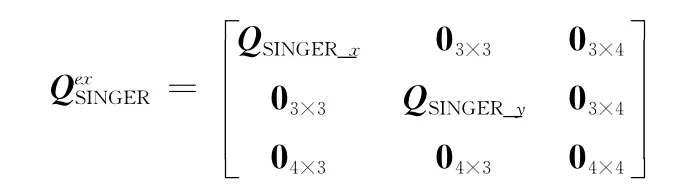
2 SINGER運動模型目標(biāo)擴維卡爾曼誤差配準(zhǔn)
擴維卡爾曼濾波算法的主要思想是將狀態(tài)空間擴展到狀態(tài)空間和系統(tǒng)誤差空間二者并集上,其維度也相應(yīng)地得到擴展。考慮系統(tǒng)誤差,目標(biāo)在SINGER運動模型的假設(shè)下狀態(tài)向量更新為

相對于單純考慮狀態(tài)空間,式(8)增加了4個維度,分別為傳感器1的距離向和方位向誤差,傳感器2距離向和方位向誤差。
目標(biāo)轉(zhuǎn)移方程為

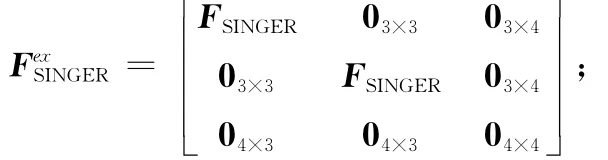
Wex是擴維后的噪聲方程矩陣,其方差為
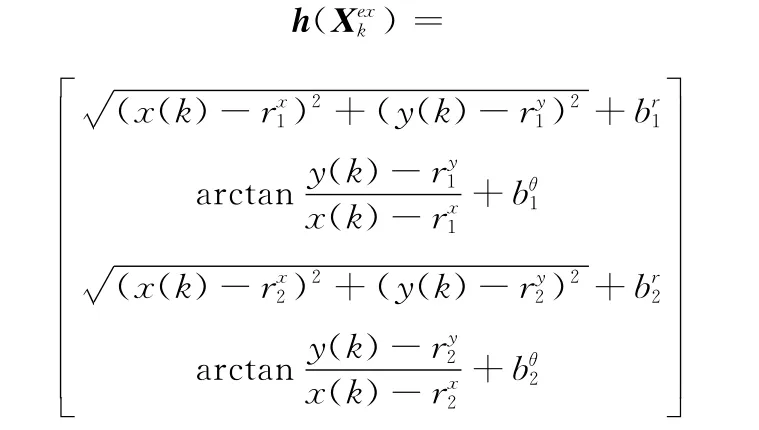
目標(biāo)量測方程表示為

其中
基于SINGER模型的擴維卡爾曼濾波算法步驟如下:
論證會議后的報告修改工作不重視,一些論證企業(yè),在論證會議結(jié)束后認為專家組基本同意報告書內(nèi)容后,不重視修改工作,反復(fù)修改,延長論證周期,降低工作效率又影響論證報告書質(zhì)量。
步驟(3)~步驟(5)中的擴維量測矩陣可以表示為
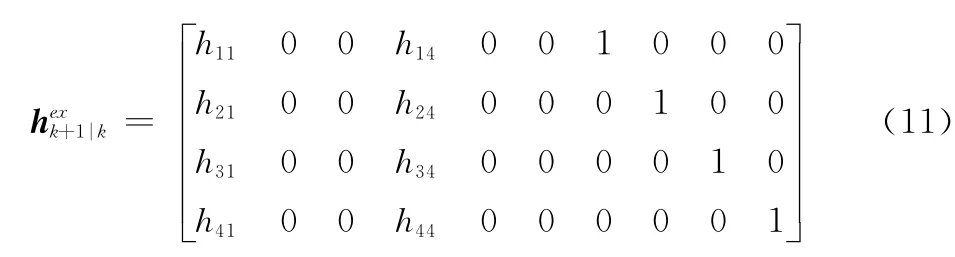
式中
將式(2)~式(11)代入到步驟1~步驟6中就得到了基于SINGER模型多平臺目標(biāo)跟蹤系統(tǒng)誤差配準(zhǔn)算法。
3 仿真驗證
在式(9)中,狀態(tài)轉(zhuǎn)移方程是由目標(biāo)運動的機動頻率決定的,不同的機動頻率對應(yīng)不同的狀態(tài)轉(zhuǎn)移矩陣和狀態(tài)轉(zhuǎn)移噪聲方差矩陣。所以有必要討論機動頻率與誤差配準(zhǔn)精度之間的變化關(guān)系,相關(guān)結(jié)論可為實際工程提供理論參考。
3.1 仿真條件
假設(shè)目標(biāo)初始速度為(15m/s,15m/s),加速度為(1m/s2,1m/s2),雷達1和雷達2系統(tǒng)估計誤差分別為(20m,2e-3rad)和(30m,3e-3rad),量測噪聲方差分別為(15m,1e-3rad)和(30m,1.5e-3rad),過程噪聲功率譜密度qx=qy=5m2/s3。雷達掃描周期同為1s,共采樣1 000個點。
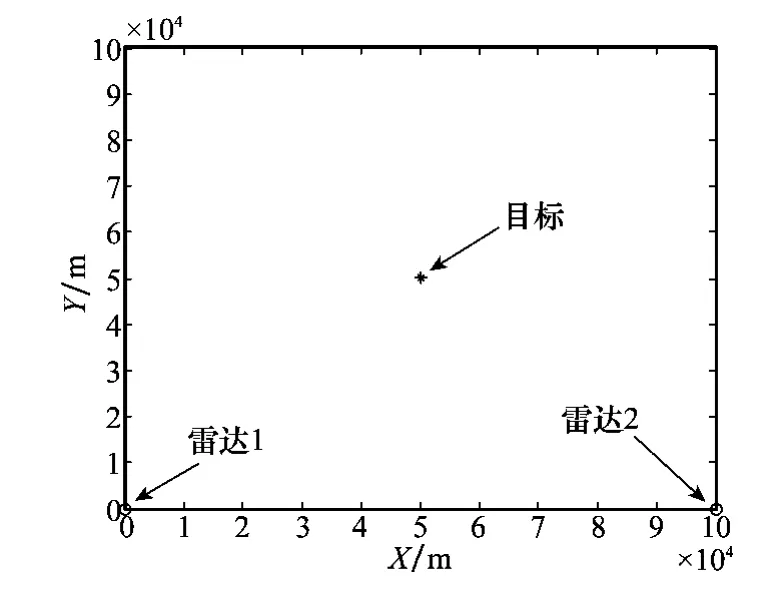
圖1 多平臺傳感器與目標(biāo)位置
3.2 仿真結(jié)果
采用蒙特卡羅仿真實驗方式,仿真次數(shù)為200次。機動頻率α分別取1/20,1/60和1/100。3種機動頻率對應(yīng)的雷達1和雷達2距離向量測誤差在圖2中給出。
圖2(a)和圖2(b)給出了不同機動頻率對應(yīng)的距離向誤差配準(zhǔn)均方根關(guān)于采樣點仿真圖。從圖中可以發(fā)現(xiàn)隨著采樣點數(shù)的增加,藍線與紅線接近于重合,說明機動頻率越大,誤差配準(zhǔn)均方誤差越大,而當(dāng)機動誤差達到一定程度,均方誤差趨于一致。顯然較小的機動頻率更加有利于系統(tǒng)誤差配準(zhǔn)。
圖2(c)和圖2(d)給出了不同機動頻率對應(yīng)的誤差配準(zhǔn)在方位向上均方誤差仿真圖。從圖中可以得到與距離向相似的結(jié)論。同樣隨著采樣點數(shù)的增加,較小的機動頻率對應(yīng)的誤差配準(zhǔn)均方誤差越來越小,α=1/60與α=1/100均方誤差在采樣點超過300個時接近一致。所以較小的目標(biāo)機動頻率更加有利于系統(tǒng)誤差配準(zhǔn)操作,而較大的目標(biāo)機動頻率較之誤差較大。
分析目標(biāo)機動頻率與系統(tǒng)誤差配準(zhǔn)關(guān)系具有很重要的實際意義。通常機動頻率表示目標(biāo)機動時間常數(shù)τm的倒數(shù),其值取決于目標(biāo)機動持續(xù)的時間,通常取經(jīng)驗值。當(dāng)目標(biāo)機動時間常數(shù)τm增加時,SINGER模型將趨近于勻加速運動模型,而當(dāng)常數(shù)τm減小時,趨近于勻速模型。
根據(jù)本文結(jié)論勻加速運動模型將更加有利于系統(tǒng)誤差配準(zhǔn)的操作,而勻速運動模型的系統(tǒng)誤差配準(zhǔn)相對更加困難。造成這種現(xiàn)象的原因在于:對于勻加速運動模型,系統(tǒng)誤差可以通過加速度、速度和位置等目標(biāo)狀態(tài)進行估計進而配準(zhǔn)補償,但是對于勻速運動模型其系統(tǒng)誤差僅通過速度和位置兩個狀態(tài)反映,而對于實際目標(biāo)跟蹤系統(tǒng),目標(biāo)速度通常變化,系統(tǒng)誤差在勻速運動模型條件下配準(zhǔn)不夠準(zhǔn)確,在勻加速運動模型更加準(zhǔn)確。
同時對于轉(zhuǎn)彎機動目標(biāo)其機動頻率通常在1/60的小區(qū)間內(nèi)變化,逃避機動目標(biāo)其機動頻率大約在1/20附近震蕩,大氣擾動機動頻率通常為1。根據(jù)本文結(jié)論對于轉(zhuǎn)彎機動目標(biāo)跟蹤系統(tǒng)誤差配準(zhǔn)相對容易,對于大氣擾動造成系統(tǒng)誤差配準(zhǔn)更加復(fù)雜。造成該現(xiàn)象的內(nèi)在原因分析將是團隊下一步重點研究內(nèi)容。
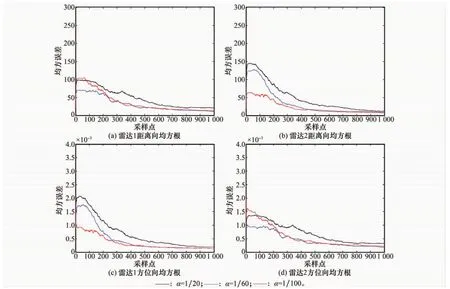
圖2 誤差配準(zhǔn)均方誤差
4 結(jié) 論
本文研究了基于SINGER運動模型的系統(tǒng)誤差配準(zhǔn)的擴維卡爾曼濾波方法,并討論了不同機動頻率對應(yīng)的系統(tǒng)誤差配準(zhǔn)均方誤差,得到了不同機動頻率對應(yīng)均方根誤差的規(guī)律。但是較大機動頻率對應(yīng)較大配準(zhǔn)誤差結(jié)論的內(nèi)在本質(zhì)仍然需要從內(nèi)在規(guī)律入手進行更加深入的研究,進而探究目標(biāo)機動運動對于系統(tǒng)誤差配準(zhǔn)的本質(zhì)影響。
[1]He Y,Xiu J J.Radar data processing with applications[M].3rd ed.Beijing:Electronic Industry Press,2013.(何友,修建娟.雷達數(shù)據(jù)處理及應(yīng)用[M].3版.北京:電子工業(yè)出版社,2013.)
[2]Chen L,Wang G H,He Y,et al.Analysis of mobile 3-D radar error registration when radar sways with platform[J].Journal of Navigation,2014,67(3):451-472.
[3]Farina A,Studer F A.Radar data processing[J].Research Studies LTD,1985(3):325-339.
[4]Burke J J.The sage real time quality control function and its interface with buic II/buic III[R].Bedford:MITRE Corporation,1996.
[5]Cui Y Q,Song Q,He Y.Performance comparison and analysis of three real-time registration bias estimation algorithms[J].Fire Control and Command Control,2011,36(9):55-59.(崔亞奇,宋強,何友.三種實時誤差配準(zhǔn)算法性能分析與比較[J].火力與指揮控制,2011,36(9):55-59.)
[6]Singer R A.Estimating optimal tracking filter performance for manned maneuvering target[J].IEEE Trans.on Aerospace and Electronic Systems,1970,6(4):473-483.
[7]Chen L Y,He J Z,Pan J H,et al.Study of multi-sensor range system bias estimation algorithm and simulation analysis[J].Journal of System Simulation,2013,25(10):2509-2514.(陳林元,何佳洲,潘江懷,等.多傳感器距離誤差配準(zhǔn)算法研究及仿真分析[J].系統(tǒng)仿真學(xué)報,2013,25(10):2509-2514.)
[8]Boer Y,Driessen J N.Multi-target particle filter track before detect application g[J].IEE Proceedings Radar,Sonar and Navigation,2004,151(6):351-357.
[9]He Y,Wang G H.Multisensor information fusion with applications[M].2nd ed.Beijing:Electronic Industry Press,2007.(何友,王國宏.多傳感器信息融合及應(yīng)用[M].2版.北京:電子工業(yè)出版社,2007.)
E-mail:110988068@qq.com
張 靖(1975-),女,高級工程師,博士,主要研究方向為信息融合、航跡關(guān)聯(lián)。
E-mail:15652540242@163.com
Real-time error registration algorithm and analysis based on the SINGER model
LI Yang,ZHANG Jing
(China Academy of Electronics and Information Technology,Beijing 100041,China)
System error registration plays a key role in the target track with multi-platform multi-sensor,which can estimate and compensate the system error of radar track.If without the accurate system error registration,the target track with multi-platform multi-sensor might generate an error or multi-tracks and cause the system track performance deterioration.An augmented Kalman filter is proposed to compensate the system error based on the target SINGER model,while the relation between the error registration accuracy and maneuvering frequency is also discussed by a simulated experience which provides a helpful theory for the system error registration in the target track with different maneuvering frequencies.
error registration;SINGER model;augmented Kalman filter;track association
TN 953
A
10.3969/j.issn.1001-506X.2015.06.05
李 洋(1983-),男,工程師,博士,主要研究方向為信息融合、誤差配準(zhǔn)。
1001-506X(2015)06-1255-04
2014-07-18;
2014-10-23;網(wǎng)絡(luò)優(yōu)先出版日期:2014-11-21。
網(wǎng)絡(luò)優(yōu)先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141121.0929.003.html
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36