RTG作業區集卡安全通行智能指示系統研究與設計
2015-05-18 13:58:42孫謙等
中國高新技術企業 2015年17期
孫謙等
摘要:文章針對集裝箱堆場作業過程中集卡車在RTG車道安全通行的問題,設計出一套簡單可靠的智能指示系統,提供給集卡車司機能否安全通行的信息,有效避免集卡車剮蹭、拖拽RTG吊具事故的發生。系統對不同集卡車、集裝箱類型及不同RTG工況下集卡能否安全通行進行智能判定,輸出結果以“紅燈停、綠燈行”的基本交通規則顯示給集卡司機。
關鍵詞:RTG作業區;集卡車;安全通行智能指示系統;PLC控制;智能判斷 文獻標識碼:A
中圖分類號:U491 文章編號:1009-2374(2015)18-0020-02 DOI:10.13535/j.cnki.11-4406/n.2015.18.011
1 研究背景
集卡車在堆場內提落箱或穿行RTG集卡通道過程中,因無地面指揮人員,如果雙方溝通出現失誤,極易發生集卡車剮蹭、拖拽吊具事故。目前RTG與集卡的溝通主要是RTG司機鳴笛或向集卡車喊話的方式,存在以下弊端:完全由人工判斷能否安全通行存在較多不可控因素,與司機操作經驗、溝通方式等多種因素有關;對于港內集卡司機來說,因熟悉作業場地與RTG作業方式,容易識別RTG發出的各種信號,但對于港外集卡司機來說,信號識別存在較大困難。為此,本文研究設計一套可靠、簡單、智能的指示系統,消除人工判斷造成的失誤,給集卡車提供簡單可靠的通行信號。
本文要解決的問題主要有以下三個方面:(1)可靠性:提供給集卡司機的通行信號必須抗干擾性強、糾錯能力高、可靠性好;(2)簡單化:因集卡司機對堆場狀況及RTG工況熟悉程度不一,提供給集卡司機的通行信號必須容易識別,越簡單越好;(3)智能化:因集卡車與集裝箱型號多、高度不同,為兼顧安全與效率,判斷通行的標準不能一概而論,要實現系統的智能判斷。
2 系統設計
2.1 系統結構
通過實時獲取RTG小車、起升機構的狀態信息,PLC經過內部智能判斷,給出當前時刻集卡車能否安全通行的信號,經過系統前端直觀地顯示給集卡車。本系統包括數據實時獲取、PLC智能判斷、系統前端顯示三部分,其中智能判斷部分是系統設計的核心,各部分的功能如下:
數據獲取:小車位置信號、吊具起升狀況、吊具開閉鎖信號、吊具高度信息。
智能判斷:小車位置是否在安全區、吊具是否在下降過程中、開閉鎖信號是否觸發、吊具是否在安全
高度。
信號顯示:利用簡單、直觀的方式將集卡車能否通行信號顯示出來。
系統功能通過軟件、硬件兩部分共同實現。軟件部分完成系統數據的實時獲取及數據智能判斷,是本系統設計的核心。硬件部分完成系統信號的傳輸及前端顯示功能,其中信號傳輸通過RTG主控系統的備用線路
完成。
本系統RTG主控PLC為YASKAWA CP-316H,起升機構采用YASKAWA PLG MSK-510-1024 1024P/R型增量編碼器,小車機構采用YASKAWA PLG LF-60B-S89 600P/R型增量編碼器。本文軟硬件部分均基于該RTG控制系統設計與實現。
2.2 軟件設計
RTG起升和小車機構電機一般配普通增量型編碼器,PLC無法直接讀取小車和起升機構的狀態信息,系統通過讀取編碼器脈沖及掃描時間實時運算起升及小車位置(可精確至厘米),完成數據的實時采集。
數據的智能判斷是系統軟件設計的核心,也是整個系統功能的核心。通過智能判斷,系統可綜合RTG作業狀態、集卡車及待提落箱型號信息,給出最終的指示信號。實現原理如下:
啟動條件:系統檢測RTG是否在作業狀態,RTG作業時本系統啟動。
RTG起升和小車安全位置設定:小車安全位置設定為離開集卡通道上方,本系統設置小車位置大于3m。在每一個作業循環內,系統對吊具安全高度進行初始化,當RTG進入工作狀態后根據集卡和箱型智能設定,本系統中安全高度初始值設定6m。
系統智能判定原則:當小車處于集卡通道上方時只要吊具下降則認為此時通道上方為危險狀態,指示燈顯示集卡禁止通行。當空吊具落到集卡箱子上或者帶著箱子的吊具落到集卡托盤上完成開閉鎖動作后記憶當時的起升高度并存儲,當吊具起升后實時檢測吊具高度與記憶高度的間距,當大于導板高度(本文設置50cm)后則認為吊具與集卡安全分離,指示燈顯示集卡可安全通行。當小車向前超過3m即認為離開集卡通道上方,此時不論何種情況,指示燈都亮綠燈。當小車下一次進入集卡通道上方自動觸發吊具安全高度初始化,重新設定初始值。
特殊工況處理:系統以吊具開鎖或閉鎖動作完成為條件,智能計算當前狀態下吊具安全高度,當吊具一次著箱或落箱未成功時,因系統未收到開鎖或閉鎖反饋信號,此時默認設定的初始值為吊具安全高度。在RTG作業間隙,按照操作規程吊具升至安全高度(大于6m),根據系統設定,系統不啟動或輸出安全通行信號。
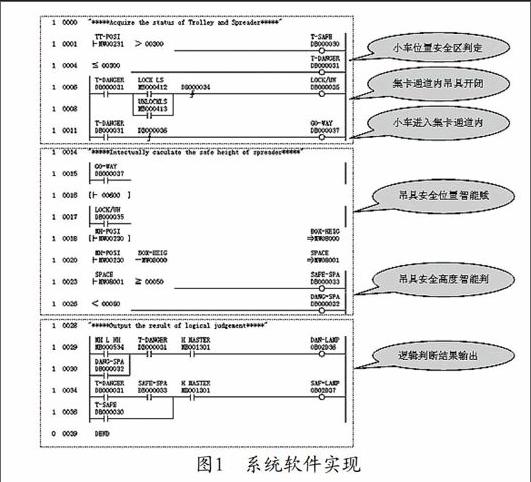
為實現程序控制的獨立性、模塊化,本系統軟件設計部分新建子圖程序,軟件實現部分見圖1所示:
2.3 硬件設計
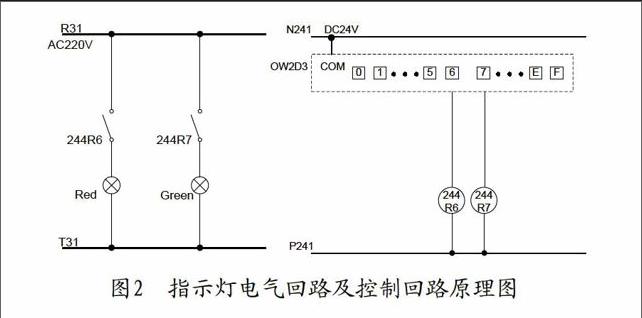
為實現簡單、直觀顯示的效果,本系統前端顯示部分通過在RTG登機口附近安裝一個LED指示燈,集卡司機可以通過后視鏡觀察指示燈顏色變化。利用“紅燈停、綠燈行”最基本的交通規則,綠燈表示吊具已離開安全距離,可以安全通行;紅燈表示吊具未離開安全距離,禁止通行。雙色燈由RTG PLC輸出2個備用中繼控制,一個紅燈(OB2D36,K244R6),一個綠燈(OB2D37,K244R7),220V電源取電氣房R31、T31,電氣房至登機口儀表箱備用線355#(10#,11#)兩根線及儀表箱內原有的T31。
244R6常開點一端在電氣房進R31,一端通過355(10#)線進登機口儀表箱再接紅燈控制線。244R7常開點一端在電氣房進R31,一端通過355(11#)線進登機口儀表箱再接綠燈控制線,兩只燈的公共線進登機口儀表箱的T31,形成220V控制回路。指示燈電氣回路及控制回路原理圖見圖2所示:
3 效果
系統前端顯示采用“紅叉綠箭”式400mm雨棚燈,安裝在上機側鞍梁內側。集卡司機通過后視鏡觀察指示燈信號變化,按照“紅燈停、綠燈行”的交通規則,安全通過RTG吊具下方通道。公司通過閘口向所有集卡發放信號燈使用說明書,集卡司機可以很容易的掌握信號燈使用方法。該系統安裝一年來,未發生集卡拖拽、刮蹭吊具事故,有效地提高了集卡車在場地內尤其RTG作業區內的運行安全。
4 結語
RTG作業區集卡通行智能指示系統通過PLC智能判斷給出當前時刻集卡車能否安全通行的信號,并且簡單直觀地顯示出來。只要集卡司機嚴格按照指示燈“紅燈停、綠燈行”的交通規則在堆場內行駛,可最大限度避免剮蹭、拖拽吊具等事故的發生。系統具有成本低、可靠性高、通用性好等優點,硬件安裝簡單、軟件程序可方便地移植到其他集裝箱堆場設備上,具有較強的推
廣性。
參考文獻
[1] 林偉國.岸橋防集卡拖拽吊具方案的研究及其應用
[J].港口科技,2014,(3).
[2] 蘇君利.大型集裝箱碼頭堆場裝卸工藝研究[J].水運工程,2006,(10).
[3] 王玉革.安川電控系統在集裝箱裝卸機械電氣改造中的應用[J].港口裝卸,2011,(5).
[4] 谷長華.岸橋小車海陸側位置判別方式改進[J].集裝箱化,2014,(7).
(責任編輯:周 瓊)