飛機(jī)電傳操縱及模擬加載系統(tǒng)實(shí)驗(yàn)臺(tái)開(kāi)發(fā)
2015-05-05 09:56:38郝魁紅何永勃
實(shí)驗(yàn)技術(shù)與管理 2015年10期
孟 忱, 郝魁紅, 何永勃
(中國(guó)民航大學(xué) 航空自動(dòng)化學(xué)院, 天津 300300)
飛機(jī)電傳操縱及模擬加載系統(tǒng)實(shí)驗(yàn)臺(tái)開(kāi)發(fā)
孟 忱, 郝魁紅, 何永勃
(中國(guó)民航大學(xué) 航空自動(dòng)化學(xué)院, 天津 300300)
為研究飛機(jī)電傳操縱系統(tǒng)性能、給電傳操縱系統(tǒng)設(shè)計(jì)提供實(shí)驗(yàn)依據(jù),設(shè)計(jì)開(kāi)發(fā)了飛機(jī)電傳操縱及模擬加載系統(tǒng)實(shí)驗(yàn)臺(tái),實(shí)現(xiàn)全機(jī)飛控操縱系統(tǒng)半物理仿真。學(xué)生可以通過(guò)實(shí)驗(yàn)臺(tái)操縱桿對(duì)飛機(jī)姿態(tài)進(jìn)行調(diào)整,模擬飛機(jī)飛行過(guò)程中的姿態(tài)調(diào)整。并可完成永磁同步電機(jī)系統(tǒng)辨識(shí)、PID參數(shù)調(diào)試、電動(dòng)加載模擬以及四余度方向舵故障模擬的實(shí)驗(yàn),使學(xué)生更好熟悉四余度EMA機(jī)電作動(dòng)器工作原理,為電傳操縱系統(tǒng)的試驗(yàn)研究提供了平臺(tái)。
飛機(jī)電傳操縱系統(tǒng); 實(shí)驗(yàn)平臺(tái); 模擬加載系統(tǒng); 四余度EMA; 半物理仿真
飛機(jī)電傳操縱系統(tǒng)是現(xiàn)代民航客機(jī)主要的電子飛行操縱系統(tǒng),具有機(jī)械操縱系統(tǒng)無(wú)法比擬的優(yōu)點(diǎn),除了重量輕,體積小之外,還可以進(jìn)一步改善飛機(jī)的操縱品質(zhì),對(duì)飛機(jī)結(jié)構(gòu)變化的影響不敏感,并能減少維護(hù)工作量以及更容易與自動(dòng)飛行控制系統(tǒng)相耦合[1]。但是,由于系統(tǒng)復(fù)雜,涉及電傳、液壓、余度管理等,目前國(guó)內(nèi)高校用于研究和教學(xué)的平臺(tái)很少,功能也很不完善。
本實(shí)驗(yàn)臺(tái)的設(shè)計(jì)采用了永磁同步電動(dòng)機(jī)控制、電動(dòng)加載模擬、余度管理等多項(xiàng)先進(jìn)技術(shù),可以實(shí)現(xiàn)全機(jī)飛控操縱系統(tǒng)半物理仿真,不僅可以用來(lái)檢測(cè)電傳操縱系統(tǒng)整體及相關(guān)零部件的可靠性,還能為研發(fā)電傳操縱系統(tǒng)提供基礎(chǔ)數(shù)據(jù),幫助學(xué)生詳細(xì)了解飛機(jī)在多種狀況下的工作狀態(tài),對(duì)系統(tǒng)性能深入掌握,增強(qiáng)系統(tǒng)排故能力很有意義。
1 飛機(jī)電傳操縱及模擬加載系統(tǒng)實(shí)驗(yàn)臺(tái)功能設(shè)計(jì)
1.1 系統(tǒng)聯(lián)調(diào)功能
系統(tǒng)聯(lián)調(diào)是對(duì)飛機(jī)電傳操縱及模擬加載系統(tǒng)提供視景仿真和實(shí)驗(yàn)環(huán)境,通過(guò)操縱桿對(duì)飛機(jī)姿態(tài)進(jìn)行調(diào)整,同時(shí)向副翼、升降舵和方向舵下發(fā)運(yùn)動(dòng)指令,模擬飛機(jī)真實(shí)飛行過(guò)程中的姿態(tài)調(diào)整,從而實(shí)現(xiàn)全機(jī)飛控操縱系統(tǒng)半物理仿真。
1.2 永磁同步電機(jī)系統(tǒng)辨識(shí)功能
永磁同步電機(jī)有諸多優(yōu)點(diǎn),但具有強(qiáng)耦合和強(qiáng)非線性的特點(diǎn),電機(jī)系統(tǒng)穩(wěn)定性易受環(huán)境影響,為保證相關(guān)的控制算法有效運(yùn)行,首先需要獲得電機(jī)相關(guān)參數(shù),對(duì)電機(jī)系統(tǒng)進(jìn)行辨識(shí)[2-8]。本實(shí)驗(yàn)臺(tái)具有對(duì)永磁同步電機(jī)進(jìn)行電流環(huán)、速度環(huán)以及位置環(huán)辨識(shí)的功能。
1.3 永磁同步電機(jī)PID參數(shù)調(diào)試功能
PID控制器性能與其控制參數(shù)密切相關(guān)[9],因此所研制的實(shí)驗(yàn)臺(tái)應(yīng)具備PID參數(shù)調(diào)試的功能,本實(shí)驗(yàn)臺(tái)可以展開(kāi)對(duì)PID控制器參數(shù)進(jìn)行合理優(yōu)化的研究。
1.4 電動(dòng)加載模擬功能
電動(dòng)加載系統(tǒng)是用來(lái)模擬飛行器舵機(jī)在飛行過(guò)程中受到的空氣動(dòng)力力矩載荷,是一種地面半實(shí)物仿真設(shè)備[10]。本實(shí)驗(yàn)臺(tái)采用該系統(tǒng)取代過(guò)去的現(xiàn)場(chǎng)試驗(yàn),具有良好的可控性、無(wú)破壞性、全天候以及操作簡(jiǎn)單方便的優(yōu)點(diǎn),并且這種試驗(yàn)可以多次重復(fù),其經(jīng)濟(jì)性是原有的現(xiàn)場(chǎng)試驗(yàn)所無(wú)法比擬的。
1.5 四余度方向舵的PID參數(shù)調(diào)整及故障模擬功能
全時(shí)間、全權(quán)限的電傳操縱系統(tǒng)必須具有相當(dāng)于機(jī)械操縱系統(tǒng)的可靠性,應(yīng)用余度技術(shù)是提高系統(tǒng)任務(wù)可靠性、安全可靠性和容錯(cuò)能力的有效手段。本實(shí)驗(yàn)臺(tái)的四余度舵機(jī)伺服系統(tǒng)具備PID參數(shù)調(diào)整及故障模擬功能,可以模擬繞組開(kāi)路故障、驅(qū)動(dòng)電路故障、舵面角位置傳感器故障、上位機(jī)通信故障、CPU故障、控制電源故障、驅(qū)動(dòng)電源故障等多種故障。并且故障診斷快速準(zhǔn)確,在發(fā)現(xiàn)故障后迅速啟動(dòng)余度管理,對(duì)輸出功率進(jìn)行重新分配,保證系統(tǒng)正常運(yùn)行。
2 電傳操縱及模擬加載系統(tǒng)實(shí)驗(yàn)臺(tái)結(jié)構(gòu)組成
實(shí)驗(yàn)臺(tái)主要由電動(dòng)舵機(jī)伺服系統(tǒng)、電動(dòng)加載系統(tǒng)、四余度舵機(jī)伺服系統(tǒng)等構(gòu)成,整個(gè)實(shí)驗(yàn)系統(tǒng)布局見(jiàn)圖1。包括控制機(jī)柜、實(shí)驗(yàn)臺(tái)、總操作臺(tái)和各個(gè)舵面的單獨(dú)操作實(shí)驗(yàn)臺(tái)。操作臺(tái)是整個(gè)系統(tǒng)聯(lián)機(jī)運(yùn)行時(shí)的總操作臺(tái),通過(guò)控制計(jì)算機(jī)同時(shí)控制5個(gè)舵面的運(yùn)動(dòng);副翼控制柜、升降舵控制柜和方向舵控制柜分別控制副翼、升降舵和方向舵的硬件控制電路和驅(qū)動(dòng)電路,能夠?qū)?個(gè)不同的舵面進(jìn)行獨(dú)立操作實(shí)驗(yàn)。仿真實(shí)驗(yàn)區(qū)可以通過(guò)Matlab進(jìn)行仿真實(shí)驗(yàn)。

圖1 系統(tǒng)總體布局圖
2.1 電動(dòng)舵機(jī)伺服系統(tǒng)
電動(dòng)舵機(jī)伺服系統(tǒng)結(jié)構(gòu)如圖2所示,舵機(jī)控制器接受上位計(jì)算機(jī)給定的舵面偏角信號(hào),輸出給定指令并通過(guò)驅(qū)動(dòng)器驅(qū)動(dòng)電機(jī)旋轉(zhuǎn),通過(guò)滾珠絲杠等傳動(dòng)機(jī)構(gòu)轉(zhuǎn)化為直線運(yùn)動(dòng),推拉舵面偏轉(zhuǎn),保證舵面在規(guī)定的響應(yīng)時(shí)間內(nèi)以一定的精度趨近給定偏角,從而改變飛機(jī)的航行姿態(tài)或航行軌跡,以達(dá)到控制飛機(jī)飛行軌跡的目的;同時(shí)通過(guò)各類傳感器,獲得電機(jī)電流、電機(jī)轉(zhuǎn)速、舵面位置等信息,并反饋給控制器和計(jì)算機(jī),實(shí)現(xiàn)伺服控制[11-12]。

圖2 舵機(jī)伺服系統(tǒng)結(jié)構(gòu)圖
2.2 電動(dòng)加載系統(tǒng)
加載系統(tǒng)的主要功能是產(chǎn)生需要的模擬負(fù)載。在電動(dòng)伺服加載系統(tǒng)中,多余力矩的存在嚴(yán)重影響了加載系統(tǒng)的控制性能和加載精度,克服多余力矩干擾是提高電動(dòng)伺服加載系統(tǒng)性能的關(guān)鍵[13]。本系統(tǒng)采用模糊控制的思想,根據(jù)舵機(jī)的擺動(dòng)幅值和運(yùn)動(dòng)頻率對(duì)控制參數(shù)PID進(jìn)行調(diào)整,根據(jù)不同的幅值和頻率查詢PID參數(shù)表選擇不同的參數(shù)進(jìn)行控制,對(duì)電動(dòng)加載過(guò)程中的多余力的消除有很好的效果。
2.3 四余度舵機(jī)伺服系統(tǒng)
對(duì)于實(shí)用的四余度舵機(jī)伺服系統(tǒng),不是簡(jiǎn)單的硬件和軟件的4倍配置,這樣不僅為配置資源花費(fèi)更多費(fèi)用,還可能大大增加系統(tǒng)出錯(cuò)的概率[14-15]。如果設(shè)計(jì)不當(dāng),系統(tǒng)可靠性反而下降。本方案采用的四余度舵機(jī)伺服系統(tǒng)機(jī)械系統(tǒng)原理框圖和電氣原理框圖見(jiàn)分別見(jiàn)圖3和圖4。

圖3 機(jī)械系統(tǒng)原理框圖
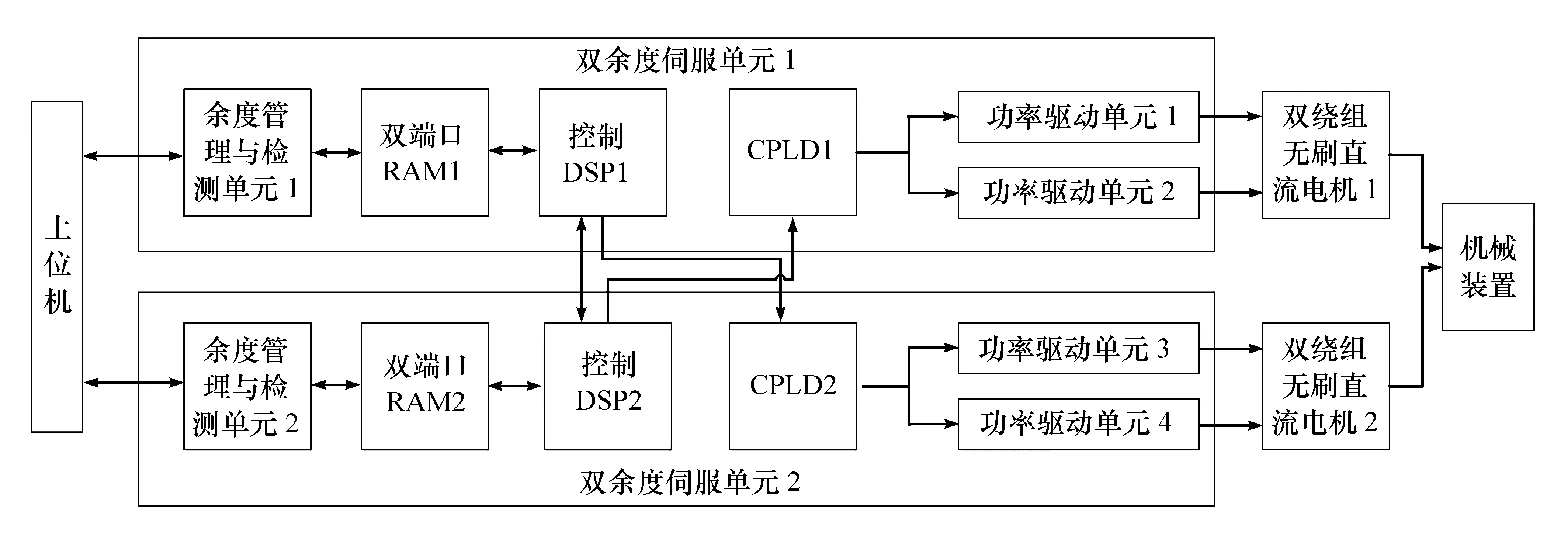
圖4 電氣原理框圖
四余度舵機(jī)伺服系統(tǒng)實(shí)物圖見(jiàn)圖5。

圖5 四余度舵機(jī)伺服系統(tǒng)
3 飛機(jī)電傳操縱及模擬加載實(shí)驗(yàn)臺(tái)實(shí)驗(yàn)項(xiàng)目設(shè)計(jì)
3.1 實(shí)驗(yàn)系統(tǒng)聯(lián)調(diào)演示
通過(guò)與下位機(jī)進(jìn)行通信,通過(guò)手柄、油門桿和飛行腳舵向下位機(jī)發(fā)送飛機(jī)升降舵、方向舵、副翼各個(gè)舵面的偏轉(zhuǎn)指令,然后從下位機(jī)接收真實(shí)的舵面偏角用于飛機(jī)飛行狀態(tài)的解算和姿態(tài)的顯示。視景界面見(jiàn)圖6。
3.2 機(jī)電作動(dòng)器EMA伺服系統(tǒng)控制實(shí)驗(yàn)
實(shí)驗(yàn)項(xiàng)目包括系統(tǒng)電流閉環(huán)控制實(shí)驗(yàn)、速度閉環(huán)控制實(shí)驗(yàn)、位置環(huán)控制實(shí)驗(yàn)及靜態(tài)加載實(shí)驗(yàn)。下面以位置環(huán)控制實(shí)驗(yàn)為例進(jìn)行介紹,其余實(shí)驗(yàn)過(guò)程與之相同。

圖6 視景界面
EMA位置跟蹤特性測(cè)試而言,根據(jù)所設(shè)計(jì)系統(tǒng)的伺服參數(shù)有:跟蹤類型、幅值、頻率、實(shí)驗(yàn)時(shí)間,PID控制器參數(shù),將上述參數(shù)輸入測(cè)控系統(tǒng)中,并輸入加載參數(shù):加載類型、負(fù)載幅值、負(fù)載頻率,啟用電動(dòng)加載系統(tǒng),進(jìn)行EMA加載時(shí)的位置跟蹤特性測(cè)試,可測(cè)得EMA力矩變化曲線、位置及速度變化曲線。例如,在對(duì)舵面施加模擬氣動(dòng)負(fù)載條件下,系統(tǒng)跟蹤4°、3 Hz正弦給定的位置閉環(huán)伺服實(shí)驗(yàn),由上位機(jī)軟件監(jiān)測(cè)獲得實(shí)驗(yàn)曲線如圖7和圖8所示。
圖7中紅色曲線為給定曲線,藍(lán)色曲線為跟蹤曲線。由圖可看出,舵機(jī)伺服系統(tǒng)位置跟蹤3 Hz正弦給定曲線,跟蹤性能良好,運(yùn)行平穩(wěn),沒(méi)有過(guò)沖現(xiàn)象。因?yàn)闄C(jī)構(gòu)減速比的原因,位置跟蹤存在相位滯后現(xiàn)象,但總體滿足系統(tǒng)要求。

圖7 上位機(jī)軟件監(jiān)測(cè)位置閉環(huán)實(shí)驗(yàn)位置波形
圖8中由左至右,從上至下分別為對(duì)應(yīng)位置閉環(huán)實(shí)驗(yàn)過(guò)程中監(jiān)測(cè)到的電機(jī)轉(zhuǎn)速、電機(jī)交軸電流、舵面負(fù)載、電機(jī)三相電流的變化情況。

圖8 上位機(jī)軟件監(jiān)測(cè)位置閉環(huán)實(shí)驗(yàn)其他數(shù)據(jù)波形
3.3 機(jī)電作動(dòng)器EMA伺服系統(tǒng)電流環(huán)、速度環(huán)、位置環(huán)參數(shù)辨識(shí)實(shí)驗(yàn)
選擇EMA伺服系統(tǒng)電流環(huán)、速度環(huán)或位置環(huán)參數(shù)辨識(shí)實(shí)驗(yàn)后,啟動(dòng)電機(jī)工作,舵面開(kāi)始偏轉(zhuǎn),開(kāi)始系統(tǒng)辨識(shí)。當(dāng)辨識(shí)動(dòng)作完成時(shí),辨識(shí)的相關(guān)數(shù)據(jù)自動(dòng)加載到Matlab狀態(tài)空間中,通過(guò)Matlab開(kāi)始對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行系統(tǒng)辨識(shí),并將系統(tǒng)辨識(shí)所得的模型參數(shù)進(jìn)行顯示,可查看辨識(shí)效果。
3.4 四余度EMA伺服系統(tǒng)故障模擬實(shí)驗(yàn)
3.4.1 全數(shù)字模型演示
全數(shù)字模型是指電機(jī)、控制器、傳感器、作動(dòng)機(jī)構(gòu)等全為數(shù)字模型,完全在上位機(jī)上通過(guò)Matlab程序運(yùn)行,以此來(lái)進(jìn)行四余度舵機(jī)全數(shù)字仿真,經(jīng)過(guò)參數(shù)配置后,運(yùn)行系統(tǒng),獲得仿真結(jié)果。
3.4.2 四余度EMA伺服系統(tǒng)故障模擬實(shí)驗(yàn)
如圖9所示,通過(guò)改變故障模擬盒對(duì)應(yīng)故障開(kāi)關(guān)的狀態(tài),模擬多種故障的發(fā)生。完成EMA伺服系統(tǒng)參數(shù)配置后,啟動(dòng)系統(tǒng),可測(cè)得四余度EMA位置響應(yīng)曲線和電機(jī)轉(zhuǎn)速曲線,據(jù)此檢測(cè)各種故障狀態(tài)下四余度EMA伺服系統(tǒng)的工作狀態(tài)。

圖9 故障模擬開(kāi)關(guān)
例如,當(dāng)電氣余度A、B和D都發(fā)生故障被切除,故障電機(jī)1所在通道離合器斷開(kāi),系統(tǒng)進(jìn)入容錯(cuò)工作方式,伺服功能由剩余的一個(gè)電氣余度實(shí)現(xiàn),此時(shí)位置響應(yīng)曲線、電機(jī)轉(zhuǎn)速曲線分別如圖10和11所示。圖10中,位置給定為5°、0.5 Hz的正弦波曲線,在12 s左右使電氣余度A、B和D故障,由位置反饋曲線可以看出,系統(tǒng)位置跟蹤比較平滑,但有些許變形。圖11中,發(fā)生故障后電機(jī)2的轉(zhuǎn)速出現(xiàn)一定抖動(dòng),電機(jī)1轉(zhuǎn)速下降到零不輸出。電機(jī)2的電氣余度C承擔(dān)全部輸出功率,其母線電流是正常運(yùn)行時(shí)母線電流的好幾倍。

圖10 容錯(cuò)工作方式4時(shí)位置響應(yīng)曲線
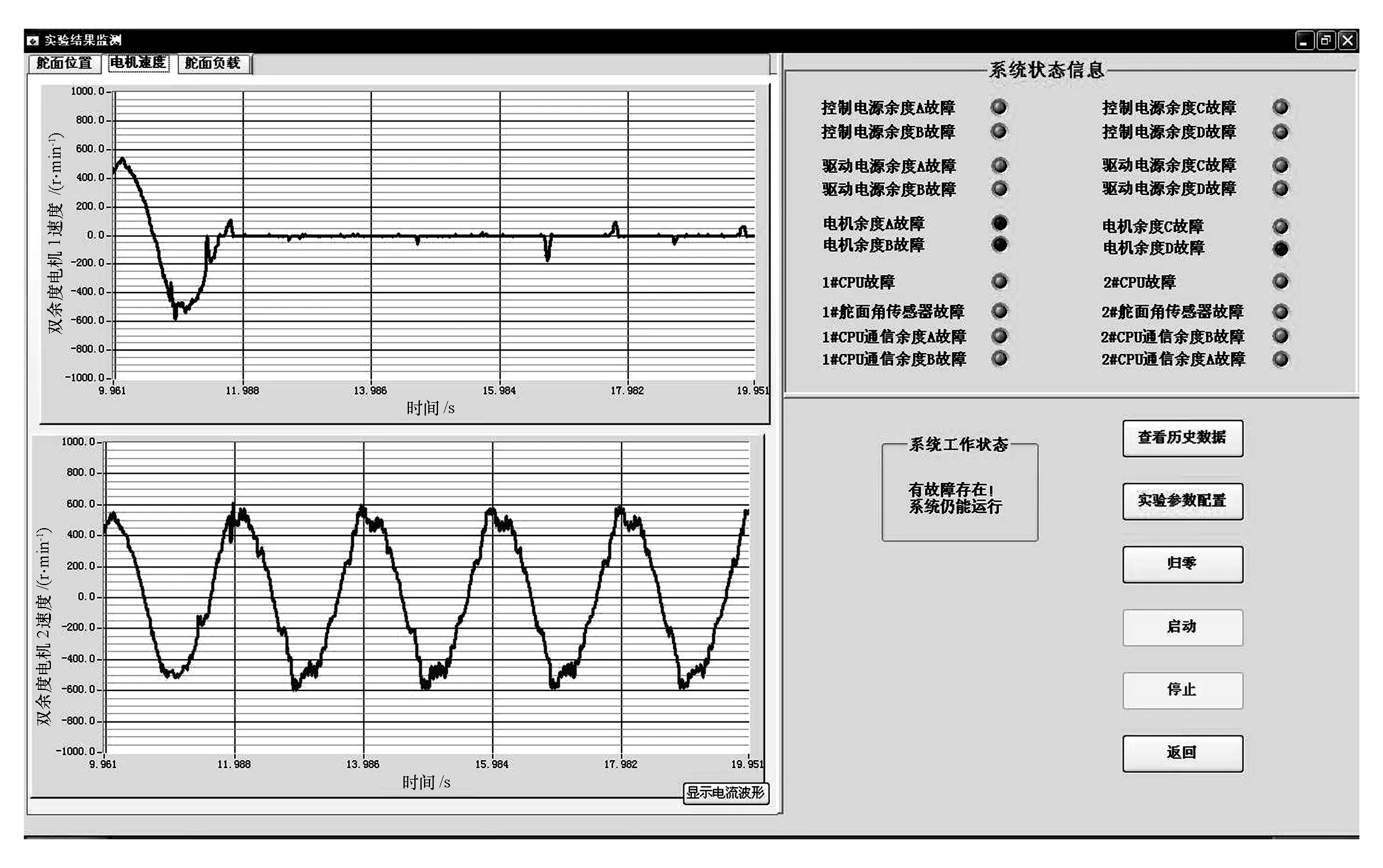
圖11 容錯(cuò)工作方式4時(shí)電機(jī)轉(zhuǎn)速曲線
4 結(jié)束語(yǔ)
電傳操縱及模擬加載系統(tǒng)實(shí)驗(yàn)臺(tái)針對(duì)一些主要的電傳操縱系統(tǒng)試驗(yàn),都能很好地實(shí)現(xiàn)模擬與實(shí)驗(yàn),在實(shí)驗(yàn)臺(tái)設(shè)計(jì)開(kāi)發(fā)的基礎(chǔ)上,將進(jìn)一步細(xì)化實(shí)驗(yàn)項(xiàng)目,完善實(shí)驗(yàn)臺(tái)功能。本實(shí)驗(yàn)臺(tái)具備良好的開(kāi)放性,可以與多種相關(guān)實(shí)驗(yàn)臺(tái)融合,下一步將協(xié)同飛機(jī)運(yùn)動(dòng)控制系統(tǒng)實(shí)驗(yàn)臺(tái),使用飛機(jī)運(yùn)動(dòng)控制系統(tǒng)實(shí)驗(yàn)平臺(tái)數(shù)據(jù)進(jìn)行電傳操縱系統(tǒng)相關(guān)實(shí)驗(yàn)項(xiàng)目的開(kāi)發(fā),從而獲得更加詳實(shí)的數(shù)據(jù)支持,這對(duì)飛機(jī)電傳操縱系統(tǒng)的開(kāi)發(fā)及教學(xué)具有十分重要的意義。
References)
[1] 高金源,焦宗夏,張平.飛機(jī)電傳操縱系統(tǒng)與主動(dòng)控制技術(shù)[M].北京:北京航空航天大學(xué)出版社,2005.
[2] 丁潔.雙頻率采用數(shù)據(jù)系統(tǒng)的辨識(shí)[D].無(wú)錫:江南大學(xué),2011.
[3] 楊靜.伺服系統(tǒng)的參數(shù)辨識(shí)[D].西安:西安電子科技大學(xué),2010.
[4] 劉永欽.基于FPGA的永磁同步電機(jī)參數(shù)辨識(shí)的研究[D].無(wú)錫:江南大學(xué),2008.
[5] Cao Xianqing,Fan Liping. Real-time PI controller based onpole assignment theory for permanent magnet synchronous motor[C]//IEEE International Conference on Automation and Logistics. Qingdao,China,2008:211-215.
[6] Abjadi N R,Soltani J, Pahlavaninezhad M, et al. A nonlinear adaptive controller for speed sensorless PMSM taking the iron loss resistance into account [C]//Proceedings of the Eighth International Conference on Electrical Machines and Systems. 2005(1):188-193.
[7] Khov M,Regnier J, Faucher J. Detection of turn short-circuit faults in stator of PMSM by on-line parameter estimation[C]//International Symposium on Power Electronics,Electrical Drives,Automation and Motion. Ischia, Italy, 2008:161-166.
[8] Khov Makara,Regnier J, Faucher Jean. On-line parameter estimation of PMSM in open loop and closed loop[C]//IEEE International Conference on Industrial Technology. Gioosland,VIC,2009.
[9] 鮑建成.永磁同步電機(jī)PID參數(shù)優(yōu)化研究[J].計(jì)算機(jī)仿真,2012,29(4):247-250.
[10] 楊峰.基于DSP的舵機(jī)電動(dòng)加載平臺(tái)的設(shè)計(jì)[D].西安:西北工業(yè)大學(xué),2007.
[11] 蘭根龍,齊蓉,吳春.永磁同步電動(dòng)舵機(jī)控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[J].微電機(jī),2014,47(3):73-77.
[12] 李兵強(qiáng),吳春,林輝.基于參考輸入學(xué)習(xí)的永磁同步電機(jī)高精度位置伺服系統(tǒng)[J].2012,32(3):96-102.
[13] 齊蓉,林輝,陳明.被動(dòng)式電動(dòng)加載系統(tǒng)多余力的研究[J].控制與決策,2006,21(2):225-228.
[14] 劉冠志,林輝,李穎.雙余度舵機(jī)控制系統(tǒng)設(shè)計(jì)[J].微電機(jī),2010,43(1):50-53.
[15] 竇滿鋒,馮智海.雙余度稀土永磁直流電機(jī)可靠性研究[J].微電機(jī),2004,37(6):6-7.
Development of experimental platform for airplane fly-by-wire and electric loading system
Meng Chen, Hao Kuihong, He Yongbo
(School of Aviation Automation,Civil Aviation University of China,Tianjin 300300,China)
Experimental platform for airplane fly-by-wire and electric loading system is designed to study the performance of airplane fly-by-wire control system and provide the experimental basis for the system.Hardware-in-the-loop(HIL) simulation of airplane control system can be completed.Students can adjust the aircraft attitude by a joystick of the experimental platform to simulate aircraft flight attitude adjustment.It can also do experiments such as permanent magnet synchronous motor system identification, parameter debugging in PID control, electric loading and the fault simulation of the four-redundancy aircraft rudder.It can make students better understand the four-redundancy EMA how to work. It also provide a platform for the research of fly-by-wire system.
airplane fly-by-wire system; experimental platform; simulation loading system ; four-redundancy EMA;HIL simulation
2015- 02- 03
中國(guó)民航大學(xué)實(shí)驗(yàn)技術(shù)創(chuàng)新基金項(xiàng)目(17-13-01);中央高校基本科研業(yè)務(wù)費(fèi)專項(xiàng)項(xiàng)目2013(3122013D022)
孟忱(1990—),男,河南商丘,碩士研究生,研究方向?yàn)殡妭鞑倏v系統(tǒng)與余度控制
郝魁紅(1967—),男,河南開(kāi)封,博士,教授,研究方向?yàn)闄z測(cè)技術(shù)與自動(dòng)化裝置.
E-mail:mchencauc@sina.com
V249.4;G484
A
1002-4956(2015)10- 0105- 06
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04