一種基于補償的多水下升降臺精確定位方法
2015-04-26 08:23:02胡丹丹王力牛國臣
機床與液壓 2015年19期
胡丹丹,王力,牛國臣
(中國民航大學機器人研究所,天津 300300)
0 前言
升降舞臺是現代演藝中常用的一種舞臺表現形式,一般應用于劇院等場所,根據設計的舞臺效果進行升降臺的編組運行,通常要求升降臺具有較高的位置控制精度[1-2]。近年來,為滿足演出需求,將升降舞臺應用于水中,如鎮江大型水景秀《白蛇傳》具有40塊水中升降舞臺,每塊可以獨立升降。
升降臺通常采用電動、液壓等驅動方式,由于升降臺位于水下,采用液壓方式存在液壓油滲漏污染水質的問題,因此,采用電動方式。在升降臺同步控制方面,基于模糊控制[3-4]、模糊神經網絡[5]、耦合策略[6-9]等對異步電機同步運行的研究很多,但對升降臺同步運行影響最大的因素是機械傳動誤差。系統中使用鋼絲繩進行遠程傳動,但鋼絲繩具有彈性,當受力變化時彈性伸長不同,存在升降臺換向遲滯現象,控制精度下降。
當系統整體為線性,而局部呈現非線性時,通常采用補償等方式以減小非線性因素對控制性能的影響。針對上述問題,擬設計一種基于補償的位置控制方法,以提高升降臺的位置控制精度。
1 水下升降臺系統構成
圖1為單臺升降臺的示意圖。

圖1 水中升降臺示意圖
由于升降臺位于水下,為減少驅動裝置對水質影響,采用電機驅動方式,電機等驅動裝置位于岸邊的設備間中。傳動裝置主要為減速機、聯軸器、鏈輪、鏈條和鋼絲繩,通過鋼絲繩遠程牽引升降臺運行。為節約空間,使用鏈輪鏈條傳動方式代替卷筒對鋼絲繩進行收放。升降臺為框架式結構,主要由內框架和外框架組成,外框架固定在地基上,內框架嵌套在外框架中,設計動滑輪和定滑輪,內框架通過鋼絲繩牽引沿著外框架的導軌進行升降運動,構成一級動滑輪。
2 升降臺位置控制
常見的升降臺控制方式有兩種,一種是“上位機+服務器+軸控制器+驅動單元”的方式,另一種是“上位機+可編程控制器(PLC)+驅動單元”的方式[10-11]。第一種方式需要專門的軸控制器,成本很高且不易后期維護,第二種方式可根據系統需求靈活選型,且可靠性高,應用較為廣泛。因此,該系統設計中選擇以PLC為核心的控制方式。
升降臺控制系統以工業上應用廣泛且性能穩定的工控機、PLC作為核心控制器,矢量型變頻器作為驅動裝置,電機選擇適用于頻繁變頻調速的變頻電機,采用“PLC+矢量型變頻器+變頻電機+編碼器”控制方式對電機進行伺服控制。
為實現升降臺的位置伺服控制,一般是在升降臺側安裝編碼器反饋升降臺的實際位置信息形成閉環。由于升降臺位于水面下,若在其上安裝編碼器,需要在水中工作,且升降臺距離控制端最遠可達上百米,編碼器信號衰減很大。因此,在升降臺上安裝編碼器很難達到理想的效果。故采用在電機尾軸上安裝編碼器方式,構成電機位置閉環負反饋系統。對變頻電機進行精確的位置控制,經過傳動裝置進而控制升降臺的位置,升降臺位置控制結構如圖2所示。

圖2 升降臺控制結構圖
PLC通過發送高速脈沖信號控制變頻器,變頻器驅動電機,進而控制升降臺運行。脈沖信號頻率決定運行速度,脈沖信號個數決定電機運行位置,且脈沖個數與位置為正比例關系。
3 升降臺運行誤差分析
3.1 零位誤差
對升降臺進行位置控制,需要明確定位的基準位置,稱為位置零點。一般是設置機械限位開關,以升降臺向下運行觸碰限位開關的位置作為機械零點。但當升降臺的數量較多時,為保證臺面平整需逐一調整限位開關,工作量很大。由于限位開關位置差異造成的定位誤差稱為零位誤差。
3.2 換向誤差
對于上述工作方式的升降臺位置控制時面臨因傳動誤差影響造成難以準確定位的問題。下面對升降臺運行中受力情況及傳動誤差產生的原因進行分析。
升降臺運行時主要受鋼絲繩拉力、運行阻力、自身重力,對其進行受力分析,上升和下降時受力情況不同,如圖3所示。其中,圖(a)為升降臺上升時受力情況,圖(b)為升降臺下降時受力情況。由于阻力始終與運行方向相反,因此,上升時阻力方向向下,下降時阻力方向向上,勻速運行時鋼絲繩拉力與運行阻力和升降臺重力關系如式(1)。

圖3 升降臺受力分析

式中:F升為上升時鋼絲繩拉力,F降為下降時鋼絲繩拉力,G為升降臺內框架重力,f為運行阻力。
鋼絲繩中拉力變化:

式中:ΔF為升降臺上升和下降時鋼絲繩中拉力變化。
由式(2)可知,由于升降臺運行阻力的影響導致鋼絲繩中拉力在上升和下降時發生變化。
鋼絲繩在拉力作用下的伸長量可由式(3)計算,對于同一個升降臺,鋼絲繩伸長量與施加的載荷成正比,可以得到鋼絲繩的伸長變化量ΔS與載荷變化量Δm成正比,即式(4)所示。升降臺勻速運行時,施加載荷所產生的力與鋼絲繩的拉力相等。因此,由式(1)可知升降臺在上升和下降過程中鋼絲繩受力不同,受力變化由運行阻力造成,變化量如式(2)所示。在升降臺運行方向改變時,由于鋼絲繩受力變化導致其伸長變化而產生誤差,稱為換向誤差。

式中:S為鋼絲繩伸長量,ΔS為鋼絲繩伸長變化量,m為施加的載荷,Δm為施加的載荷變化量,L為鋼絲繩長度,E為鋼絲繩的彈性模量,a為鋼絲繩截面積。
由式(2)和(4)可得升降臺換向時鋼絲繩伸長變化量:

升降臺換向誤差包括兩種:
(1)上升換向誤差
該誤差產生于升降臺“下降—停止—上升”過程,下降時鋼絲繩受力小,而上升時鋼絲繩受力大,在下降到上升轉換過程中阻力大小先逐漸減小后增大,方向由圖3(b)中方向向上變化為圖3(a)中方向向下。升降臺由靜止到上升過程中,在鋼絲繩伸長量增加ΔS范圍內,升降臺仍保持靜止,導致上升時出現誤差。
(2)下降換向誤差
該誤差產生于升降臺“上升—停止—下降”過程,與(1)中情況相反,鋼絲繩受力將減小,阻力大小先逐漸減小后增大,方向由圖3(a)中方向向下變化為圖3(b)中方向向上。升降臺由靜止到下降過程中,在鋼絲繩伸長量減小ΔS范圍內,升降臺仍保持靜止,導致下降時出現誤差。
換向誤差僅出現在升降臺運行方向改變后第一次運行中,而繼續運行時位置控制較為準確。
4 升降臺誤差補償
4.1 零位補償
為確定升降臺統一的零點位置,在機械限位開關上方設置一平面,稱為電氣零點。升降臺由機械零點位置上升到電氣零點稱為零位補償,上升的距離稱為零位補償值,該值通過實際測量得到,具體方法如下:
(1)升降臺以較低速度下降,直至觸碰到停止限位開關,此處位置為零;
(2)使用水平儀測量當前升降臺的標高,為減小誤差,均測量升降臺的中心位置;
(3)以中間的升降臺作為基準,控制其上升直至達到設定的高度(如設定上升100 mm作為電氣零點,通過水平儀觀察標尺以確定位置),其余升降臺達到標尺相同位置即可,分別記錄每臺升降臺上升的高度,作為到達基準平面的零位補償值。
當升降臺運行到電氣零點后,將其位置清零,作為進行位置控制的零點。
4.2 換向補償
升降臺進行零位補償后已經完成對上升換向誤差的補償,繼續上升時控制較為準確。
升降臺進行下降換向時按照如下步驟測量補償值:
(1)在升降臺上固定標尺,使用水平儀觀察標尺讀數,記錄為h1;
(2)控制升降臺下降一段距離h(如200 mm),記錄標尺讀數h2;
(3)按照式(6)計算補償值δ;

(4)驗證補償值δ是否準確
①控制升降臺上升一段距離,記錄停止時標尺讀數h3;
②控制升降臺下降距離h+δ,記錄標尺讀數h4;
③按照式(7)進行計算,其中ε為誤差容許值,通常取ε=1 mm。若在容許范圍內,則認為補償準確,否則根據差值修正補償值,然后再重復步驟(4),直至符合式(7)。

由第3節中分析可知,升降臺上升換向為下降換向的逆過程,因此,補償值相同。升降臺在上升與下降過程中設定高度與實際高度的關系如圖4所示。經零位補償后,升降臺位置為零,此時已換向,繼續上升時鋼絲繩拉力變化不大,實際高度與設定高度近似為正比例關系;下降時,需先下降換向補償值δ升降臺才開始下降,之后再次下降時實際高度與設定高度近似為線性關系。例如,升降臺上升到高度h',設定高度應為h';下降到高度h',設定高度應為h″,且滿足式(8)。


圖4 升降臺設定高度與實際高度關系
5 升降臺位置控制實驗
以鎮江大型水景秀《白蛇傳》的40個水中升降臺控制為例,復位至機械零點后,取上升100 mm為電氣零點,逐臺測試到達電氣零點的零位補償值。然后,測量換向補償值,其中前10臺升降臺的測試結果如表1所示。表中可以看出零位補償值與設定的上升值100 mm相差較大,這是由于限位開關安裝位置不同及上升換向誤差綜合因素造成的結果;換向補償值的差異原因在于升降臺的運行阻力及鋼絲繩長度不同。表2為升降臺進行位置控制的測試實驗,10個升降臺分別上升和下降3 700 mm,使用水平儀測量實際運行的高度,從表中數據可以看出,位置控制誤差較小。
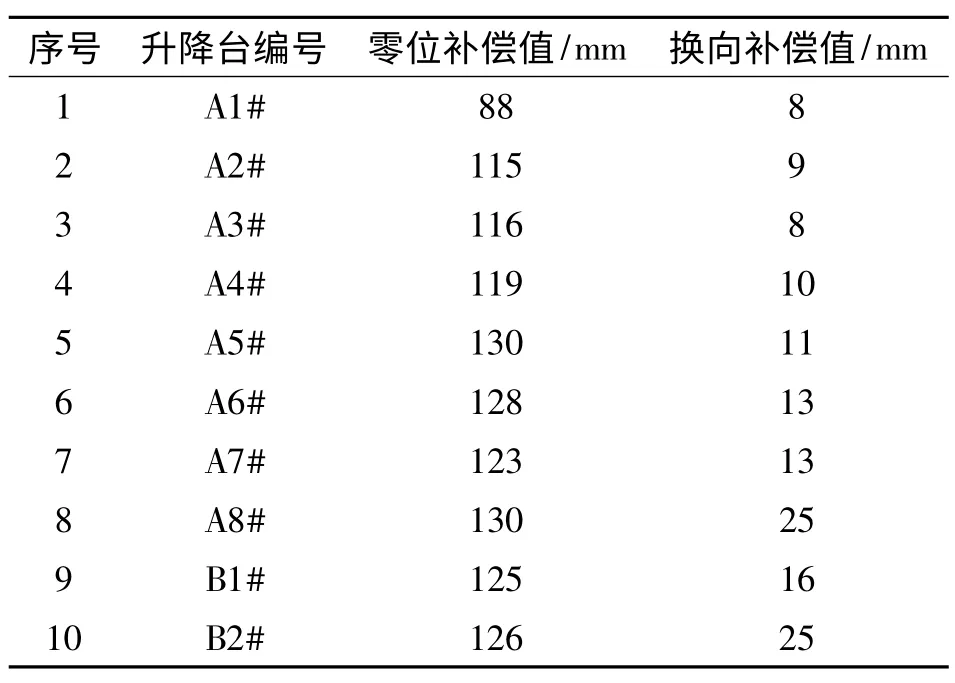
表1 升降臺零位補償值和換向補償值
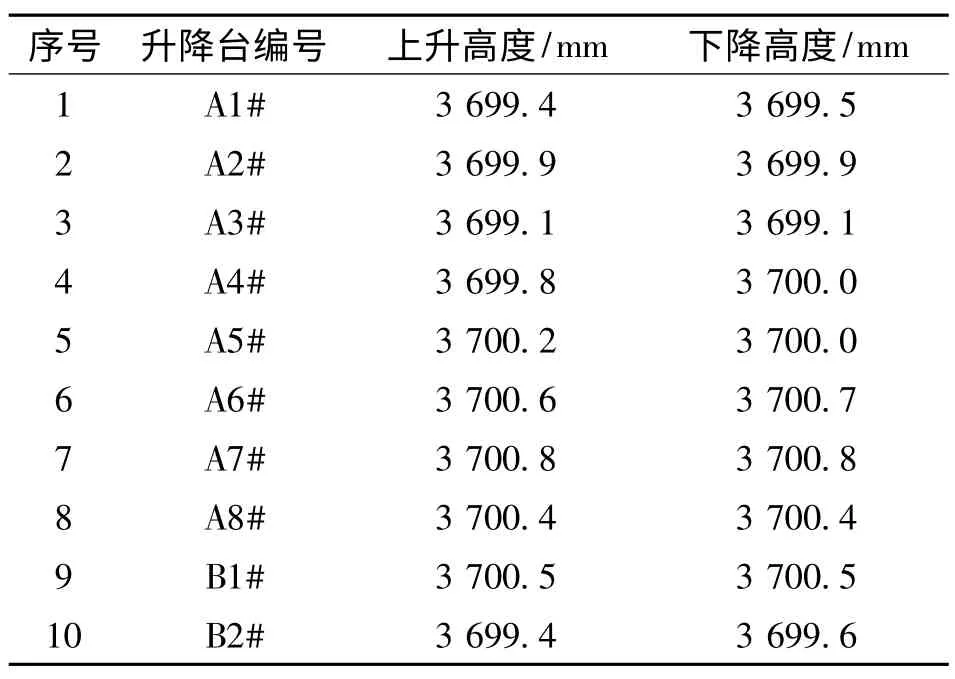
表2 升降臺位置控制測試
任選一個升降臺進行位置控制的實驗,升降臺從電氣零點開始,先逐漸上升再下降,每次高度差為1 000 mm。在升降臺上固定標尺,使用水平儀觀察并記錄每次的標尺讀數,并計算相鄰兩次讀數的高度差。表3為以B4#升降臺為例測試的數據,可以看出定位誤差在±2 mm范圍內,符合設計要求。

表3 B4#升降臺位置控制測試
升降臺運行場景圖如圖5所示,其中,圖5(a)為40個升降臺位于同一高度,呈現平面,圖5(b)為凹形場景圖。從圖中可以看出,位置控制較為準確,能夠滿足演出需求。
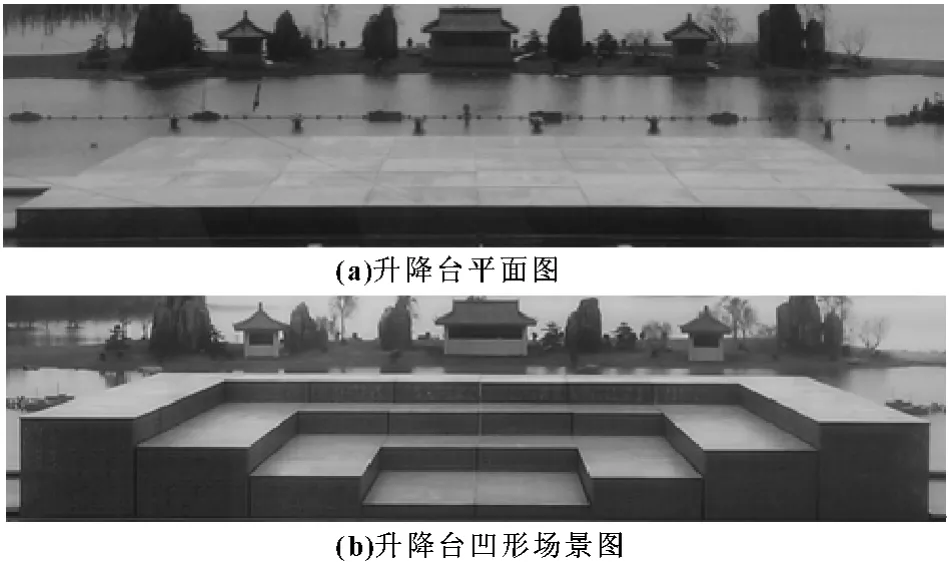
圖5 升降臺運行場景圖
6 結束語
針對水下升降臺遠程驅動的特點,設計了控制系統結構。分析影響升降臺位置控制精度的因素,設計了一種基于補償的位置控制方法,通過測量零位差值和換向誤差,進行零位補償和換向補償以提高定位精度。該方法不用建立復雜的控制模型且易于操作實現,實踐證明可有效地提高水中升降臺的位置控制精度。
[1]劉基順,吳澗彤,楊永魁.舞臺機械控制系統功能及性能分析[J].演藝科技,2012(3):1-5.
[2]呂圣龍.武漢琴臺大劇院的舞臺機械[J].藝術科技,2010(2):3-13.
[3]袁溪澤,齊向東.基于PLC的升降舞臺同步模糊控制系統研究[J].工業儀表與自動化裝置,2012(3):98-101.
[4]崔皆凡,邢豐,趙楠.基于模糊控制器的改進耦合多電機同步控制[J].微電機,2011,44(3):75-77,120.
[5]張承慧,石慶升,程金.一種多電機同步傳動模糊神經網絡控制器的設計[J].控制與決策,2007,22(1):30-34.
[6]張承慧,石慶升,程金.一種基于相鄰耦合誤差的多電機同步控制策略[J].中國電機工程學報,2007,27(15):59-63.
[7]劉星橋,胡建群,周麗.自抗擾控制器在三電機同步系統中的應用[J].中國電機工程學報,2010,30(12):80-85.
[8]劉然,孫建忠,羅亞琴.基于環形耦合策略的多電機同步控制研究[J].控制與決策,2011,26(6):957-960.
[9]范巖.多電機同步控制策略的改進[J].機電工程,2007,24(6):65-66,82.
[10]李磊,劉日良,張承瑞.基于工業以太網冗余舞臺控制系統研究[J].計算機測量與控制,2012,20(9):2396-2398.
[11]李旭寧,彭思遠,吳澗彤.舞臺自動控制系統設計與冗余技術研究[J].電氣傳動,2009,39(8):58-60.