基于MOGA的潛器快速性和操縱性綜合優化研究
2015-04-26 05:45:42楊卓懿宋磊
船舶力學 2015年5期
楊卓懿,宋磊
(山東交通學院船舶與海洋工程學院,濟南250000)
基于MOGA的潛器快速性和操縱性綜合優化研究
楊卓懿,宋磊
(山東交通學院船舶與海洋工程學院,濟南250000)
基于Pareto解的多目標優化方法NSGA-II應用至潛器的快速性與操縱性綜合優化設計之中。通過回轉體潛器阻力性能的數值計算結果建立了阻力的近似計算模型,并與系列模型試驗結果進行了比較;通過估算潛器的水動力系數,根據水平面線性運動方程得出水平面操縱運動穩定性和機動性的衡準指標。優化后,得到了阻力與回轉直徑的Pareto最優解的散點圖,設計者可針對不同需求的潛器,從中進行選擇,保證了Pareto最優解對應的每一艇型設計方案在滿足操縱性要求下阻力最小,或在該阻力值的條件下操縱性最優。
潛水器;快速性;操縱性;Pareto解;多目標優化
0 引言
在潛器初步設計階段,設計者能夠綜合考慮快速性、操縱性的要求,找到艇型參數、主尺度和操縱面參數的最優組合解集,并擁有足夠設計決策權,才能保證潛器具有最優的航行性能。多學科與多目標優化提供了一種用于解決此類問題的手段,這也是艦艇設計領域的重要發展方向。從目前國內外的研究來看,艦艇的多目標優化由于更接近實際工程問題,正逐漸成為新的研究方向。如Peri、Tahara等[1-3]開展了高速雙體船阻力與耐波性優化。楊松林等[4]利用線性加權求和的方法將多目標優化問題轉化為單目標優化問題,進行了水面船的快速性和操縱性優化。龐永杰等[5]將阻力和排水量作為潛器概念設計階段的目標函數,給出了優化后的Pareto解集。李學斌等[6]針對潛艇設計也做過相關研究。
基于Pareto解的多目標優化[7]找到的是全部非劣解集合,為設計者提供了重要的設計信息,避免了傳統多目標優化方法中目標函數線性加權時權值選取的主觀性。因此,本文將基于Pareto解的多目標優化方法應用至潛器的快速性與操縱性綜合優化設計之中。在操縱性數學模型建立時,依據了潛艇操縱性設計計算標準[8];在快速性數學模型建立時,由于阻力估算經驗公式[9]的基礎因子是細長比,無法反映出艇型形狀參數對阻力的影響,因此本文根據回轉體的CFD計算建立了阻力近似計算模型,并與系列模型試驗結果進行了比較,證明本文建立的近似模型更適宜應用在優化設計之中。
1 計算問題表述及建模
以某水滴型回轉體潛器為原型,該潛器直徑為1.0 m,長度為5.5 m,排水量為3.0 t,尾舵尺寸為0.360×0.420 m,舵面積為0.302 4 m2。水滴型艇型的母線線型是由1/4可以調整指數的橢圓及一段可以調整指數的拋物線來描述的,其公式如下[9]:
艏部曲線方程:

艉部曲線方程:

式中:ns、nw分別為艏部和艉部的形狀系數,代表了艏部和艉部的豐滿度。Ls為艏段長度,Lw為艉段長度,D為中段直徑。計算過程中,應考慮潛水器具有平行中體,長度為Lz,則用6個參數能完整表達水滴型艇型。
根據實際問題的考慮,設計了如下限制條件:
(1)舵面積及舵安裝位置保持不變。本文對操縱性的優化,只考慮主艇體的機動性,因此選擇的設計參數為艇型參數,舵面積保持不變。即在相同舵效的基礎上,設計具有最優機動性能指標的潛水器。
(2)潛水器直徑D保持1 m不變;排水量Δ不小于原型,即Δ≥3.0。因為直徑D的尺寸通常根據耐壓艙布置而確定,其他探測導航設備則尺寸較小布置靈活,排水量不小于原型可以滿足總布置的要求。
本文建立的數學模型如下:

優化過程中的5個設計變量,如表1所示。

表1 設計變量列表Tab.1 The list of design variables
2 操縱性數學模型的建立
根據國家標準[8],潛器水平面內橫準參數可以由如下公式計算得到:
(1)靜不穩定系數

(2)動穩定系數

式中:lβ′為相對傾復力臂;為相對阻尼力臂。m′為無量綱質量;Nr為單位搖艏角速度r引起的力矩N;Nv為單位橫向速度v引起的力矩N;Yr為單位搖艏角速度r引起的力Y;Yv為單位橫向速度v引起的力Y。以上水動力導數的估算公式參考規范[8]。
(3)相對定常回轉直徑Ds

3 快速性數學模型的建立
3.1 阻力近似模型的建立
計算流體力學軟件Fluent可以模擬復雜流體流動現象,得到高精度的流場的解,并能提供詳細的流場信息,目前已經成為水動力分析的重要工具。水滴型艇型具有6個控制參數,單次阻力數值時間約3小時,為獲取足夠多且具有代表性的樣本點,本文針對5 kns航速安排計算了40次拉丁方試驗設計[10],得到排水體積V與濕表面積S、阻力F的40次CFD計算結果。根據試驗設計,在Fluent中完成不同艇型的阻力數值計算,根據最小二乘法原理建立總阻力的4階RSM(response surface model,RSM)模型。圖1為根據試驗設計完成艇型阻力近似模型建立的流程圖。

圖1 近似模型建立過程Fig.1 Process of setting up the approximate model
首先建立水滴型艇型的型值計算程序,輸出型值點,然后導入Gambit中完成潛器和流場域的建立。網格劃分時,對流域進行分割,除艉部過渡處以外,進行了結構網格的劃分,從而保證了計算的精度。輸出網格文件.msh導入至Fluent中作詳細的計算。建立模型過程中的每一步操作以命令流的形式記錄在Gambit的日志文件中,并且在Gambit中可以通過直接導入Journal日志文件完成建模和網格模型的輸出[11]。對于大量的相似的試驗,可以借助于Journal日志文件,高效率地實現參數化建模。在Fluent中進行流體數值模擬計算,需要設置復雜繁瑣的求解模型和邊界條件,同樣可以應用Fluent自帶的journal文件,自動導入.msh文件,一次性完成求解模型、邊界條件和計算步數等設置。
3.2 阻力近似模型精度的驗證
為了驗證阻力近似模型的精度,設計了系列潛器模型,在循環水槽進行了阻力試驗。回轉體艇體直徑D為280 mm,平行中體長為734 mm,分別設計了2組艏部模型和艉部模型,具體尺寸如下。艏部系列模型為兩組:①長度為280 mm;②長度為504 mm;艉部系列模型為兩組:③長度為504 mm;④長度為784 mm。這樣,系列模型試驗共有4個組合,如圖2所示,分別為:
第一組合:①+平行中體+③,總長為1 518 mm;
第二組合:②+平行中體+③,總長為1 742 mm;
第三組合:①+平行中體+④,總長為1 798 mm;
第四組合:②+平行中體+④,總長為2 022 mm。

圖2 系列模型的四個組合Fig.2 The four combinations of serial models

圖3 系列回轉體模型及阻力試驗Fig.3 Serial revolving models and drag test
加工后的系列回轉體模型及組合一在循環水槽內的直航阻力試驗圖片如圖3所示。根據系列潛器模型試驗結果做出的阻力曲線如圖4所示。

圖4 系列模型的阻力曲線Fig.4 Drag curves of serial revolving models
根據系列模型試驗數據,在傅汝德假定的基礎上,取來流速度為1.5 m/s的模型數據換算到近似模型適用區間內的實艇上。取流速1.5 m/s的主要原因是根據換算結果,實艇主尺度在近似模型適用區間內,同時模型的雷諾數≥(1.5~2.0)×107,滿足船模邊界層處于湍流狀態的要求。根據四種組合的換算結果,取4個測試點,見表2,進行近似模型精度檢驗,分別將近似模型的近似解、CFD數值計算結果與根據試驗結果換算得到的實艇阻力數據進行對比,如表3所示。
表3中,F1表示由試驗值換算得到的實艇阻力;F2表示由CFD計算得到的阻力值;F3表示由4階RSM計算得到的阻力值;F4表示由工程經驗公式[6]計算得到的阻力值;ε2~ε4,分別表示以上計算值與試驗值之間的誤差,
由表3中數據可知,CFD計算值、4階RSM模型、經驗值與試驗值的相對誤差均值分別為7.64%,9.49%,37.01%。造成計算與試驗值差別的原因除計算方法因素外,還包括基于傅汝德假定的換算誤差、模型試驗存在尺度效應等不可控制因素。4階RSM模型能夠正確反映艇型參數對阻力結果的影響且精度較高,而由經驗公式得到的阻力值與試驗值差別較大,并且經驗公式的基礎因子是細長比,無法反映出艇型參數對阻力結果的影響,在優化設計中不宜采納。

表2 測試點數據Tab.2 The data of four test points

表3 不同計算方法下的阻力估算值Tab.3 The drag values calculated by different methods
4 基于Pareto解的多目標遺傳算法
本文研究了NSGA-Ⅱ算法,并將其運用到艇型優化中,具體的技術策略如下:
(1)浮點數編碼。涉及多維、高精度要求的連續函數優化問題時,浮點數編碼可以有效地提高搜索效率。采用浮點數編碼,即利用如下的線性變換:

式中:bi,ai為變量的上下限,yi為[0,1]內的隨機數。所有變量對應的xi構成問題解的編碼形式。
(2)非支配排序方法。在選擇操作執行之前,種群根據Pareto最優個體進行排序。首先,找出該種群中的所有Pareto最優個體,并賦予它們一個共享的虛擬適應度值,得到第一個Pareto最優層;然后,對種群中的其它個體繼續按照Pareto最優個體進行分層,并賦予它們一個新的虛擬適應度值,該值要小于上一層的值,對剩下的個體繼續上述操作,直到種群中的所有個體都被分層。這樣,同一級別的個體具有相同的虛擬適應度值。
(3)基于排擠機制的小生境技術。為了確保種群的多樣性,即希望解能夠盡可能地分散在整個Pareto解集內,算法中引入了小生境技術對相同個體或類似個體的數量加以限制。計算在種群中給定點的周圍個體的密度mi,它表示在個體i周圍包含個體i本身但不包含其他個體的最小距離。當mi值較小時,表示該個體周圍比較擁擠。這樣,如果兩個個體的非支配排序不同,取虛擬適應度值較高的個體;如果兩個個體在同一級,取周圍較不擁擠的個體。
5 優化結果及分析
在快速性與操縱性的多目標優化過程中,NSGA-Ⅱ算法控制參數設置為種群大小120,進化代數80和150,交叉概率0.85,變異概率0.1。圖5給出了多目標優化過程中種群的進化趨勢,從圖5中看出,隨著進化代數的增加,種群向著Pareto最優前沿逼進。圖6給出了阻力和回轉直徑的Pareto最優解的散點圖,進化代數達到80時,種群分布圖已經初步表示出了Pareto前沿,當進化代數達到150時,種群分布圖已經表示出了明顯且均勻的Pareto前沿。
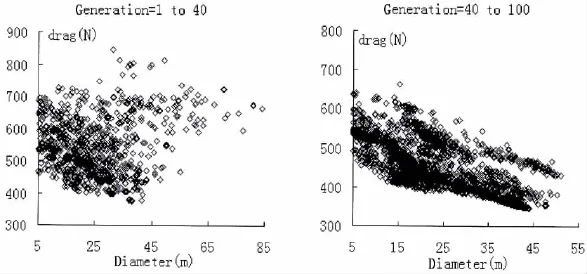
圖5 快速性與操縱性優化的進化趨勢圖Fig.5 Evolutionary trend of resistance and manoeuvring optimization
在最終獲得的Pareto最優解集中任意取4點,No.1和No.4靠近Pareto前沿的兩端,分別表示有較為極端的操縱性能最優方案和阻力性能最優方案;No.2和No.3靠近中間,表示均衡考慮操縱性能和阻力性能的最優方案。表4中給出了4種具體設計方案對應的艇型參數值。從表4中可以看出,增加首尾段長度、減少平行中體段長度,即排水量滿足約束條件下,增加細長比,增加潛水器的絕對長度,可以引起阻力的減小以及相對回轉直徑的增加。設計時,可以將所有的Pareto前沿對應的設計方案記錄下來,針對不同需求的潛器,從中進行選擇。

表4 Pareto解集中的四個設計方案Tab.4 The four results of Pareto optimal solutions

續表4
表4中,y1表示排水體積;y2表示細長比;y3表示相對回轉直徑;y4表示阻力近似值。
6 結論
本文研究了基于多目標遺傳算法的潛器操縱性與快速性綜合優化設計,通過分析,得到如下結論:
(1)潛器快速性數學模型建立時,本文根據CFD數值計算建立了阻力近似模型,與系列模型試驗結果進行比較后,證明文中建立的近似模型能夠正確反映艇型參數對阻力結果的影響,且精度高于經驗公式估算結果,更適宜應用在優化設計之中;
(2)與固定權重的多目標優化不同,本文可以得到阻力與回轉直徑的Pareto最優解的散點圖。Pareto解集為設計人員提供了非常重要且大量的設計信息,設計人員可以根據設計問題的實際需要和自己的經驗從中選擇,能夠保證Pareto最優解對應的每一潛器方案在滿足操縱性要求下阻力最小,或者說該阻力值的前提下操縱性最優。
[1]Peri D,Campana E F.Simulation based design of fast multi-hull ship[C]//26th Symposium on Naval Hydrodynamics. Rome,Italy,2006.
[2]Tahara Y,Peri D,Campana E F,Stern F.Single and multi-objective design optimization of a fast multi-hull ship:Numerical and experimental results[C]//27th Symposium on Naval Hydrodynamics.Seoul Korea,2008.
[3]Tahara Y,Peri D,Campana E F,Stern F.Computational fluid dynamics based multi-objective optimization of a surface combatant[J].Marine Science and Technology,2008,12(2):95-116.
[4]董亮,楊松林.高速單體船快速性和操縱性綜合優化混沌算法[J].江蘇科技大學學報,2007,2,21(1):7-11. Dong Liang,Yang Songlin.Overall optimization of rapidity and maneuverability of high-speed monohull ship based on chaos algorithm[J].Journal of Jiangsu University of Science and Technology(Natura l Science Edition),2007,2,21(1): 7-11.
[5]楊卓懿,于憲釗,龐永杰,宋磊.基于多目標遺傳算法的潛器外形優化設計[J].船舶力學,2011,8,15(6):874-880. Yang Zhuoyi,Yu Xianzhao,Pang Yongjie,Song Lei.Optimization of submersible shape based on multi-objective genetic algorithm[J].Journal of Ship Mechanics,2011,15(6):874-880.
[6]李學斌,潘治.潛艇概念設計階段的多目標優化研究[J].海軍工程大學學報,2008,4,20(2):56-60. Li Xuebin,Pan Zhi.Multi-objective optimization study on conceptual design of submarine[J].Journal of Naval University of Engineering,2008,4,20(2):56-60.
[7]Deb K,Pratap A,Agarwal S,et al.A fast and elitist multi-objective genetic algorithm:NSGA-II[J].IEEE Transactions on Evolutionary Computation,2002,6(2):182-197.
[8]中華人民共和國國家軍用標準GJB/Z205-2001.潛艇操縱性設計計算方法[S].北京:國防科學技術工業委員會, 2001.
[9]朱繼懋.潛水器設計[M].上海:上海交通大學出版社,1992:114-116.
[10]Simpson T W,Lin K J,Chen W.Sampling strategies for computer experiments design and analysis[J].International Journal of Reliability and Applications,2001,2(3):209-240.
[11]齊恩伍,蔣丹,劉斌.前處理軟件GAMBIT參數化建模功能增強研究[J].東華大學學報,2008.6,34(3):341-343. Qi Enwu,Jiang Dan,Liu Bin.The investigation of enhancing the preprocessor GAMBIT function of parametric modeling [J].Journal of Donghua University(Natural Science),2008.6,34(3):341-343.
Integrated design of resistance and manoeuvring performances for submersible based on MOGA
YANG Zhuo-yi,SONG Lei
(College of Naval Architecture and Ocean Engineering,Shan Dong Jiao Tong University,Jinan 250000,China)
The multi-objective arithmetic NSGA-II based on Pareto solution is investigated to deal with integrated design of resistance and manoeuvring performances for submersible.Approximation model of drag for serial revolution shapes is constructed by hydrodynamic numerical calculations,and the precision of response surface model is validated by compared with the result from experiment of serial models in circular flume.The appraisement criterion of stability and mobility are calculated from linear equation of horizontal movement by estimating hydrodynamic coefficients of submersible.After optimization,the scattered Pareto solution of drag and turning diameter is gained,and from these the designer can choose the reasonable one from the actual requirement which can ensure the minimum drag in this manoeuvring performance or the best manoeuvring performance in this drag value.
submersible;resistance;manoeuvring;Pareto solution;multi-objective optimization
U661.31
A
10.3969/j.issn.1007-7294.2015.05.007
1007-7294(2015)05-0526-08
2014-11-11
山東交通學院博士科研啟動基金資助項目
楊卓懿(1983-),女,博士,講師,E-mail:yangzhuoyi@hrbeu.edu.cn;宋磊(1981-),男,博士,講師。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
