自主緊急制動系統避撞策略的研究
2015-04-13 02:51:58朱西產董小飛馬志雄
汽車工程 2015年2期
李 霖,朱西產,董小飛,馬志雄
(同濟大學汽車學院,上海 201804)
?
2015030
自主緊急制動系統避撞策略的研究
李 霖,朱西產,董小飛,馬志雄
(同濟大學汽車學院,上海 201804)
本文中提出了一種新的自主緊急制動系統避撞策略。首先基于真實交通工況中駕駛員的緊急制動行為構建了危險估計模型;然后開發了兩級預警兩級制動的避撞策略,它根據危險估計模型計算出的危險等級選取相應的介入方式。PreScan仿真結果表明,該策略可有效避免碰撞或減輕碰撞的程度。
主動安全;自主緊急制動系統;避撞策略;危險工況;危險估計;PreScan
前言
自動緊急制動系統(autonomous emergency braking system, AEB)是重要的主動安全技術,該系統在檢測到車輛前方出現碰撞危險時,通過聲音和圖像等方式向駕駛員發出警告,提醒駕駛員采取措施回避碰撞。如果駕駛員沒有及時對警告信號做出正確反應,碰撞危險變得十分緊急時,系統通過自動制動來回避碰撞或減輕碰撞程度。
AEB系統具有很大的安全潛力。Euro-NCAP的研究表明,AEB可以避免27%的交通事故,同時能大幅降低碰撞事故中人員受傷害的程度。因此,AEB受到了各國政府和評價機構的高度重視,Euro-NCAP從2014年開始把AEB場地測試結果納入整車安全性評價體系,ECE也發布了AEB法規。在法規和標準的推動下,AEB已經成為當前主動安全技術的研究熱點。
目前國外對AEB的研究較多。文獻[1]中基于日本交通事故統計數據開發了一種帶三級制動的避撞策略。文獻[2]中基于專業駕駛員的緊急制動特征對AEB的介入策略進行了研究。文獻[3]中對AEB系統的技術要求、成本和安全收益做了詳細分析。現在已有一些較為成熟的AEB產品進入市場,比如VOLVO的城市安全系統(city-safety)[4]等。但是由于不同國家和地區的交通環境不同,駕駛員的駕駛習慣有很大差異,因此國外已有的研究成果并不能直接應用于我國。而國內針對AEB的研究還非常少,目前沒有成熟的研究成果。
據此,本文中著眼于建立兼容我國特殊交通工況的AEB系統的避撞策略。首先利用可視化行車記錄儀對真實的交通工況進行采集,并對采集到的工況進行篩選和分類得到典型的危險工況,接著對典型危險工況下駕駛員的緊急制動行為進行分析,然后按照駕駛員的緊急制動行為分析結果建立危險估計模型和避撞策略,最后通過PreScan建模仿真對所提出的AEB避撞策略進行了驗證。
1 真實交通工況的采集
獲取我國真實的交通工況和駕駛員行為是開發適合我國的AEB系統避撞策略的前提。出租車具有運營時間長,運行道路覆蓋范圍廣等特點,因此特別適用于快速獲取真實的交通工況。從2008年開始,課題組通過在數輛出租車和警車上安裝可視化車輛行駛記錄儀(video drive record, VDR)對上海市嘉定區的真實交通場景進行采集(圖1)。VDR內置一個攝像頭記錄車輛前方視野的道路交通影像,其他一些信息如車輛速度和縱向與側向加速度等也同時記錄。本文中所用的VDR在縱向或側向加速度絕對值大于0.4g時觸發,只記錄觸發前15s和觸發后5s的數據。
2 駕駛員緊急制動行為特征提取
通過VDR采集獲得了總計約4 000例觸發工況,對這些數據進行人工篩選,去掉沒有碰撞危險的工況,最終得到8例事故和1 200例危險工況。然后通過主觀評價對這1 200例危險工況的危險程度進行分級,從中挑選出共計430例危險程度較高的工況,并將它們按照NHTSA提出的37類預碰撞場景進行分類[5],結果如圖2所示,最典型的6類危險工況共有303例,占所有危險工況總數的70%。本文中采用這303例危險工況來分析駕駛員行為。
在這303例危險工況中,所有駕駛員都采取制動來避免碰撞。提取駕駛員在緊急制動過程中車輛的平均減速度絕對值并進行高斯擬合,結果如圖3所示,緊急制動過程中車輛的平均減速度絕對值的均值μ=2.77m/s2,標準差σ=1.01m/s2。因此,可以認為95%的駕駛員在緊急制動時平均制動減速度絕對值小于4.43m/s2(μ+1.64σ),可見駕駛員通常難以完全利用車輛的制動潛能。
另外,分析駕駛員在緊急制動開始時刻的TTC(time-to-collision)值,這里駕駛員緊急制動開始時刻定義為車輛制動響應開始時刻,并未考慮制動器帶來的延遲。實際上由于制動器響應延遲的影響,駕駛員開始緊急制動的時刻應比本文中得出的時刻更早,但為分析方便,將制動器延遲時間歸入駕駛員反應時間的范疇,不作為一個單獨的因素進行分析。TTC是指同一路徑上同向行駛的兩車保持當前速度直到碰撞發生所需要的時間,即
TTC=-xr/vr
(1)
式中xr、vr含義如圖4所示。
為數據提取方便準確,在計算駕駛員緊急制動開始時的TTC值時,只選用前車減速工況。同時,由于用于工況采集的車輛行駛范圍主要集中在城市,所有危險工況基本都分布在車速40km/h以下,因此,本文中只選用40km/h以下的數據進行分析。另外根據文獻[6]和文獻[7],駕駛員的制動行為與TTC的倒數(TTC-1)密切相關,因此,本文中選用TTC-1代替TTC,最終得到駕駛員緊急制動開始時TTC-1與本車速度之間的關系,同時對數據進行線性擬合,并求出90%的預測區間(見圖5)。其中50百分位線是通過線性擬合得到,可認為約有50%的駕駛員在TTC-1達到該線時已經采取了緊急制動操作。可以看出,駕駛員緊急制動開始時的TTC值并不是一個定值,而是與自車速度成一定關系,這點與文獻[8]中得出的結論一致。5百分位線和95百分位線包圍區域為駕駛員緊急制動開始時刻TTC-1值的90%預測區間,95百分位線表示當TTC-1達到該曲線所表示的值時,估計約有95%的駕駛員已經采取了制動。而5百分位線表示只有約5%的駕駛員在TTC-1達到該曲線所表示的值時采取了緊急制動操作。
50百分位線、95百分位線和5百分位線的表達式分別為
TTC-1=1.1184-0.0131vf
(2)
TTC-1=1.7609-0.0128vf
(3)
TTC-1=0.476-0.0134vf
(4)
3 AEB避撞策略研究
3.1 AEB介入策略
如圖6所示,把駕駛員所處的交通環境按照危險程度(0表示沒有碰撞危險,1表示碰撞無法回避)劃分為Ⅰ-Ⅴ 5個區域。在區域Ⅰ時,AEB系統沒有檢測到碰撞發生的危險,系統無任何動作。在區域Ⅱ時,AEB系統監測到有碰撞危險,但危險程度較低,系統采用基于圖像的提示性預警提醒駕駛員危險的存在。在區域Ⅲ時,危險等級上升到較高水平,此時系統向駕駛員發出碰撞預警提醒駕駛員碰撞將要發生,采用聲音和圖像雙重警告。在區域Ⅳ時,碰撞的危險很高,系統在發出碰撞預警的同時采用部分制動。在區域Ⅴ時,碰撞的危險極高,碰撞即將發生甚至無法避免,AEB系統采用完全制動。傳統的AEB系統只在危險等級較高時發出預警,即只有碰撞預警,通常是簡單的燈光閃爍或者蜂鳴聲,這些信息是二元的,包含的危險信息較少,并且留給駕駛員的時間很短,根據這些信息駕駛員通常很難在較短的時間內做出正確的判斷和反應[9]。文獻[10]中的研究表明,在檢測到有碰撞危險存在但危險程度不高時,也應該給予駕駛員提示性的警告,告訴駕駛員危險類型和危險方位等更具體的信息。因此,本文中采用提示性預警加碰撞預警兩級預警策略。
本文中假設道路摩擦因數為0.8,即車輛完全制動時能達到的最大制動減速度為-0.8g。部分制動時以38%的制動力制動,部分制動時的制動減速度約為-0.3g。
3.2 危險估計模型的建立
本文中主要利用TTC-1來判斷危險等級并進行危險區域的劃分。當TTC-1值高于95百分位線時,危險等級極高,進入危險區域Ⅴ。考慮到當車速較高時,駕駛員通過轉向操作回避碰撞的趨勢增加[11]。因此為避免與駕駛員有意識的轉向行為產生沖突,當速度較高時,設定臨界TTC-1值為定值。參考UNECE法規草案,取臨界TTC=0.8s[12](TTC-1=1.2s-1)。因此,當TTC-1≥max(1.7609-0.0128vf,1.2)時,危險區域為Ⅴ(圖7)。
當TTC-1值高于50百分位線時,危險等級很高,即危險區域Ⅳ。同理,為避免與駕駛員有意識的轉向避撞行為相沖突,在速度較高時,設定臨界TTC-1值為定值。設駕駛員轉向過程中車輛側向位移為3.5m,根據Hugemann的研究成果,駕駛員急轉向時平均側向加速度的50百分位值約為0.3g[13],本文中為減小誤報率,設轉向回避碰撞時車輛的平均側向加速度小于0.4g,即ay_50=0.4g,則轉向過程中車輛側向位移為
(5)
(6)

在危險區域Ⅲ,AEB系統采用碰撞預警,本文中采用聲音和圖像的聯合預警。根據文獻[14]中的研究結論,在采用聲音和圖像聯合預警時,駕駛員反應時間的均值為0.90s。出于保守起見,本文中設置在Ⅳ區域前1.0s的區域為危險程度較高區域,即區域Ⅲ。
在區域Ⅱ,系統采用基于圖像的提示性預警。根據文獻[14]中的研究結論,采用圖像預警時,駕駛員的反應時間均值為1.13s。同理,出于保守起見,設置5百分位線前1.2s的區域為危險程度較低區域,即區域Ⅱ。同時,從圖5中可以看出,所有駕駛員緊急制動開始時刻的TTC-1值均大于0.2s-1,因此設置區域Ⅱ的下界為TTC-1=0.2s-1。
最終各危險區域的劃分如圖7所示。
但是,基于TTC-1的危險判別方法只適用于相對速度較大的情況。對于近距離穩定跟車工況,即兩車距離較小但相對速度很小甚至為0時,如果前車突然制動,后車將會有發生追尾碰撞的危險。這種危險屬于潛在的,基于TTC-1的算法無法識別這種危險。
為考慮這種近距離穩定跟車工況,最常見的做法是引入THW(time-headway)即兩車相對距離除以后車速度[15]。但是THW并不是一個與碰撞危險直接相關的量,駕駛員在選取跟車工況下的THW值時,受到多方面因素的影響,比如地域、前車類型等[16],因此采用THW并不能準確估計危險程度。
本文中采用基于期望減速度areq的算法來考慮近距離穩定跟車工況。設前車初始位置為xp0,速度為vp0,以ap0(為負)的減速度開始制動。后車初始位置為xf0,速度為vf0,在駕駛員反應時間T后開始制動,能夠避免碰撞的最小減速度定義為期望減速度areq[17]。圖8為兩種不同的制動工況:①相對距離為零時前車已經停止,即前車先完成制動;②相對距離為零時前車還在運動,即后車先完成制動。考慮到上述兩種工況,最終areq為
(7)
其中t1=
T+t′=T-2xr(T)/vr(T)=
(8)
式中:t1為假設后車無制動,兩車相對距離為零的時刻。
穩定跟車工況下危險是潛在的,不一定會發生碰撞的危險。為避免在前車未制動時本車突然劇烈制動對駕駛員正常行駛帶來干擾,只將近距離穩定跟車工況危險等級按照Ⅰ-Ⅳ的區域劃分,即穩定跟車工況下AEB系統不會全制動介入。
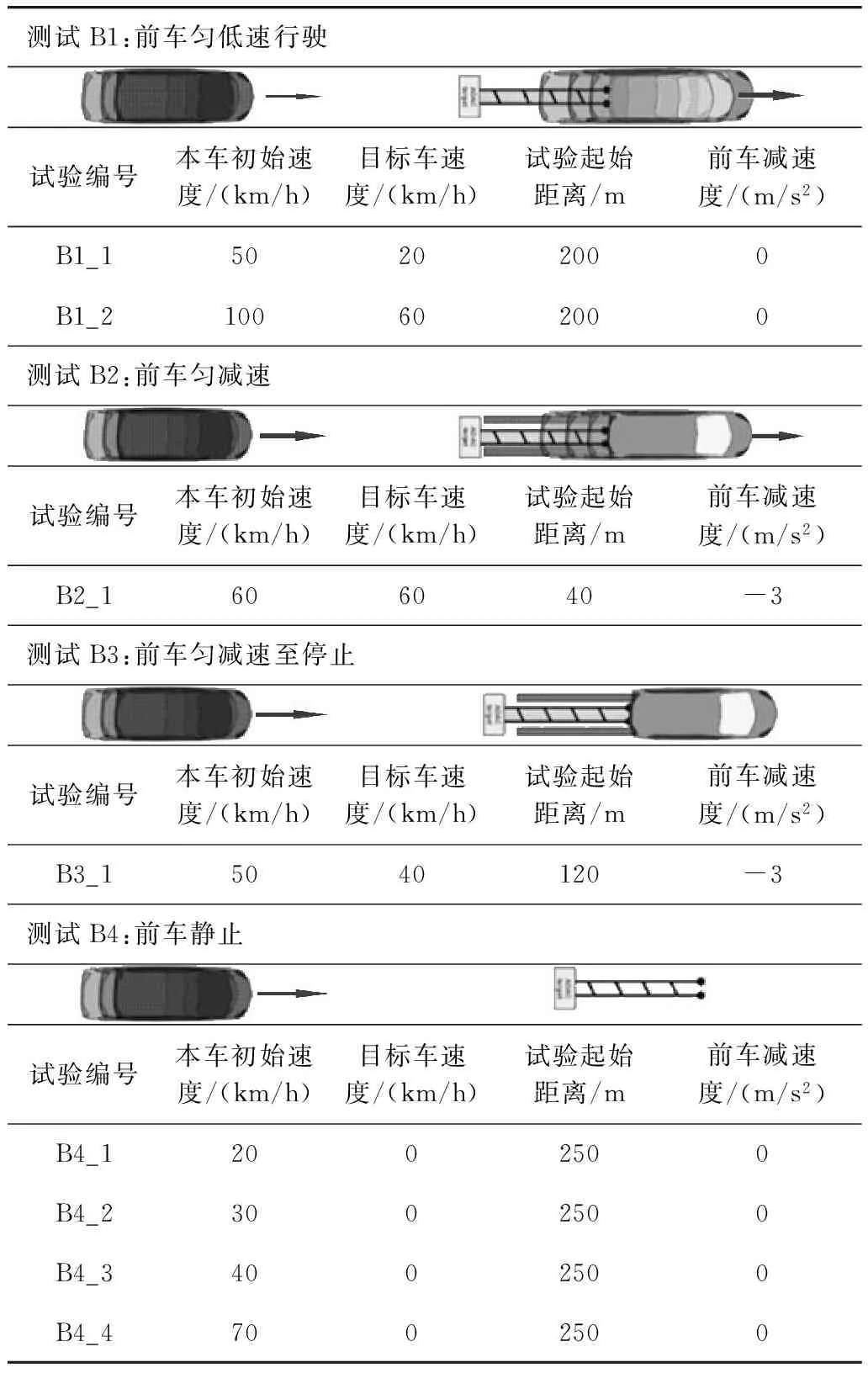
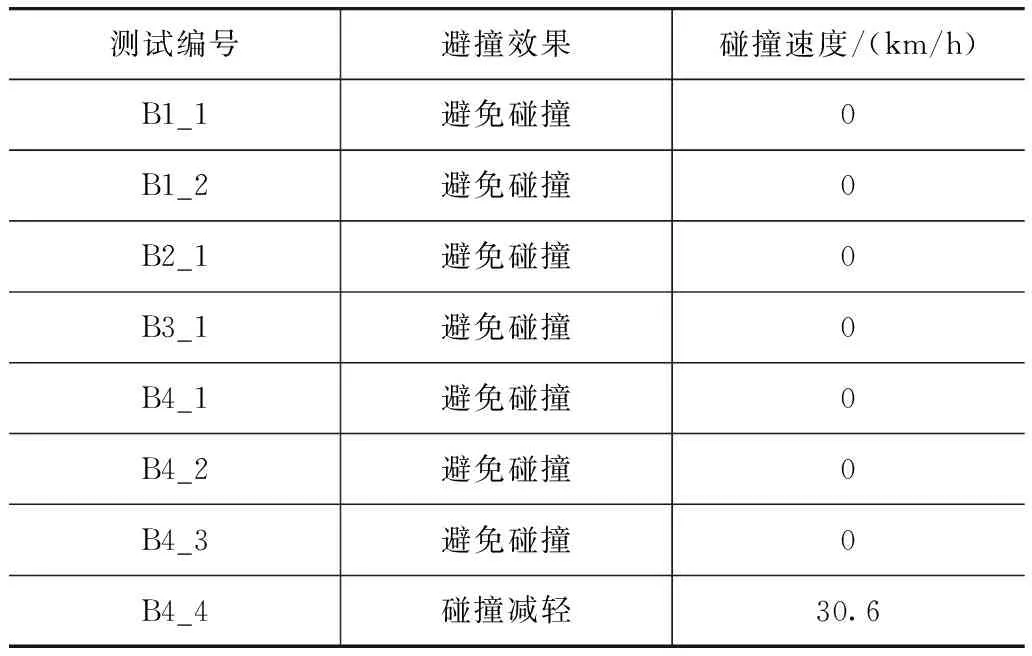
取駕駛員反應時間T=1.0s[14],因為50%的駕駛員緊急制動減速度絕對值小于2.77m/s2,95%的駕駛員緊急制動減速度絕對值小于4.43m/s2(圖3),因此,取ap0=-4.5m/s2。按照期望減速度areq的值將近距離穩定跟車工況劃分為Ⅰ-Ⅳ 4個區域:當areq>-3m/s2時,屬于安全跟車工況,即區域Ⅰ;當-4.5m/s2 國際上已經有機構推出了AEB測試方法,如ADAC、AEBGroup、ASSESS等[18]。其中ADAC的測試方法是Euro-NCAP的推薦方法,本文中也采用ADAC的有效性測試方法通過仿真分析來驗證AEB避撞算法的有效性。AEB的有效性測試方法主要分為前車勻低速行駛、前車勻減速、前車勻減速至停止和前車靜止4種工況,如表1所示。 采用PreScan軟件建立了這幾種測試場景,選用PreScan自帶的雷達模型來探測車輛前方的障礙物,探測距離為150m,采樣頻率100Hz,最終建立的場景如圖10所示。仿真時實時輸出車速、警告信號和制動壓力等信息(圖11)。 表1 ADAC的AEB有效性測試方法 篇幅所限,本文中僅詳述測試B1高速工況的仿真結果。該測試中本車以恒定速度靠近慢速行駛的前車,測試開始時本車速度為100km/h,前車速度為60km/h,兩車相距200m。仿真結果如圖12所示,在測試開始時,兩車相對距離為200m,由于本文中所用雷達的探測距離為150m,無法探測到目標,此時相對距離設置為150m,TTC值設為15s。4.7s時,雷達探測到目標物,由于本車速度大于前車,相對距離和TTC值都逐漸減小,但此時仍然沒有檢測到危險,處于安全區域Ⅰ。14.17s時,進入危險區域Ⅱ,AEB系統向駕駛員發出提示性預警,但由于車輛并未制動,兩車仍然以恒定的相對速度靠近,相對距離和TTC值繼續減小。16.82s時,進入危險區域Ⅲ,系統向駕駛員發出碰撞預警。17.83s時,進入危險區域Ⅳ,AEB系統開始以38%的制動壓力(67MPa)部分制動,相對速度減小,但相對距離和TTC值仍繼續減小。18.62s時,進入危險區域Ⅴ,系統開始全制動(150MPa),TTC繼續減小,在18.83s時達到最小值0.8s。相對速度在19.62s時減小為0,此時相對距離達到最小值2.68m,成功避免碰撞。由于全制動后,碰撞危險逐漸減小,危險區域又逐漸由Ⅴ變為Ⅰ。 總的仿真結果如表2所示。 表2 仿真結果 從仿真結果可以看出,研究的AEB避撞策略在ADAC的B1、B2、B3測試工況中可以完全避免碰撞,在測試工況B4中,可以避免本車速度為20、30和40km/h 3種工況的碰撞,在本車速度為70km/h時,無法避免碰撞,但可以將碰撞速度減少39.4km/h。 基于典型危險工況,提取駕駛員在典型危險工況下的緊急制動行為特征,得到了駕駛員在緊急制動過程中車輛的平均制動減速度和緊急制動開始時刻的TTC值,并根據這兩個參數建立了基于TTC-1和期望減速度areq的危險估計模型。然后按照危險估計模型將行駛工況進行危險區域劃分,并建立AEB的避撞策略,該策略按照危險等級的升高以“無動作-基于圖像的提示性預警-基于圖像和聲音的碰撞預警-部分制動-全制動”順序介入。最后通過PreScan仿真建模,按照德國ADAC提出的AEB有效性測試方法對所開發的AEB避撞策略進行驗證。仿真結果表明,所提出的AEB避撞策略避撞效果較好,可以在很大程度上避免碰撞,在碰撞無法避免時,也可以有效降低碰撞的嚴重程度。本文中建立的避撞策略所有閾值都是根據上海地區真實交通工況下駕駛員的行為特征設定,對于開發兼容我國特殊的交通工況的AEB避撞策略具有指導意義。 但是,本文中只是通過仿真驗證了AEB系統的避撞性能,并沒有對提示性預警和碰撞預警的效果和用戶接受度進行驗證。后續的研究將采用主觀評價實驗驗證所開發的預警策略的介入時刻和人機交互界面。同時,還計劃采用駕駛模擬器或實車實驗對本文所研究的AEB算法進行驗證。 [1] Kodaka K, Otabe M, Urai Y, et al.Rear-end Collision Velocity Reduction System[J].SAE Transactions,2003,112(6):502-510. [2] Wada T, Tsuru N, Isaji K, et al.Characterization of Expert Drivers’ last-second Braking and Its Application to a Collision Avoidance System[J].Intelligent Transportation Systems, IEEE Transactions,2010,11(2):413-422. [3] Grover C, Knight I, Okoro F, et al.Automated Emergency Brake Systems: Technical Requirements, Costs and Benefits[J].Automated Emergency Brake Systems: Technical Requirements, Costs and Benefits,2013,1(1):1-109. [4] Distner M, Bengtsson M, Broberg T, et al.City Safety—A System Addressing Rear-end Collisions at Low Speeds[C].Proceedings of the 21st International Technical Conference on the Enhanced Safety of Vehicles,Paper No.09-0371; Stuttgart,2009. [5] Najm W G, Smith J D, Yanagisawa M.Pre-crash Scenario Typology for Crash Avoidance Research[R].Washington, DC: National Highway Traffic Safety Administration,2007.DOT HS 810 767. [6] Moon S, Yi K.Human Driving Data-based Design of a Vehicle Adaptive Cruise Control Algorithm[J].Vehicle System Dynamics,2008,46(8):661-690. [7] Kiefer R J, LeBlanc D J, Flannagan C A.Developing an Inverse Time-to-collision Crash Alert Timing Approach Based on Drivers’ Last-second Braking and Steering Judgments[J].Accident Analysis & Prevention,2005,37(2):295-303. [8] Brown T L, Lee J D, McGehee D V.Human Performance Models and Rear-end Collision Avoidance Algorithms[J].Human Factors,2001,43(3):462-482. [9] Lee J D, Hoffman J D, Stoner H A, et al.Application of Ecological Interface Design to Driver Support Systems[C].Proceedings of the 16th World Congress on Ergonomics (IEA 2006).Maastricht, the Netherlands: Elsevier,2006. [10] Lee J D, McGehee D V, Brown T L, et al.Collision Warning Timing, Driver Distraction, and Driver Response to Imminent Rear-end Collisions in a High-fidelity Driving Simulator[J].Human Factors,2002,44(2):314-334. [11] Kiefer R J, Cassar M T, Flannagan C A, et al.Forward Collision Warning Requirements Project Final Report—Task 1[R].Washington, DC: National Highway Traffic Safety Administration,2003,DOT HS 809 574. [12] United Nations.Regulation No.AEBS.Uniform Provisions Concerning the Approval of Motor Vehicles with Regard to the Advanced Emergency Braking System[S].E/ECE/324 E/ECE/TRANS/505 Rev.2/Add.AEBS. [13] Hugemann W, Nickel M, Morawski I, et al.Longitudinal and Lateral Accelerations in Normal Day Driving[C].Proceedings of ITAI Conference, Stratford: GB,2003. [14] Zhang Y, Antonsson E K, Grote K.A New Threat Assessment Measure for Collision Avoidance Systems[C].Proceedings of the IEEE ITSC 2006.Toronto: IEEE,2006:968-975. [15] Milanés V, Pérez J, Godoy J, et al.A Fuzzy Aid Rear-end Collision Warning/Avoidance System[J].Expert Systems with Applications,2012,39(10):9097-9107. [16] Brackstone M, McDonald M.Driver Headway: How Close is Too Close on a Motorway?[J].Ergonomics,2007,50(8):1183-1195. [17] Hiraoka T, Tanaka M, Kumamoto H, et al.Collision Risk Evaluation Index Based on Deceleration for Collision Avoidance(First Report)[J].Review of Automotive Engineering,2009,30(4):429-437. [18] Eriksson H, Jacobson J, Hérard J, et al.On the Design of Performance Testing Methods for Active Safety Systems[M].Advanced Microsystems for Automotive Applications 2012, Springer,2012:187-196. A Research on the Collision Avoidance Strategy forAutonomous Emergency Braking System Li Lin, Zhu Xichan, Dong Xiaofei & Ma Zhixiong SchoolofAutomotiveStudies,TongjiUniversity,Shanghai201804 A new collision avoidance strategy for an autonomous emergency braking system is proposed in this paper.Firstly a risk assessment model is established based on the emergency braking behavior of driver in real traffic scenarios.Then a collision avoidance strategy with two levels of warning and two levels of braking intensity is developed, which chooses corresponding ways of interventions according to the risk level calculated with risk assessment model.Simulation results with PreScan show that the strategy proposed can effectively avoid collisions or mitigate the severity of collisions. active safety; autonomous emergency braking system; collision avoidance strategy; risk scenario; risk assessment; PreScan 原稿收到日期為2013年4月28日,修改稿收到日期為2013年7月24日。4 仿真驗證
5 結論
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
公民與法治(2016年4期)2016-05-17 04:09:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
時代英語·高三(2014年5期)2014-08-26 02:49:51