機(jī)電無級傳動混合動力驅(qū)動系統(tǒng)的模式切換協(xié)調(diào)控制*
2015-04-12 08:28:43羅玉濤王敷玟
汽車工程 2015年5期
關(guān)鍵詞:控制策略發(fā)動機(jī)
羅玉濤,王敷玟
1.華南理工大學(xué)機(jī)械與汽車工程學(xué)院,廣州 510640; 2.廣東省汽車工程重點實驗室,廣州 510640)
?
2015094
機(jī)電無級傳動混合動力驅(qū)動系統(tǒng)的模式切換協(xié)調(diào)控制*
羅玉濤1,2,王敷玟1,2
1.華南理工大學(xué)機(jī)械與汽車工程學(xué)院,廣州 510640; 2.廣東省汽車工程重點實驗室,廣州 510640)
開發(fā)了一種由雙轉(zhuǎn)子電機(jī)和雙排行星齒輪機(jī)構(gòu)組成的機(jī)電無級傳動混合動力驅(qū)動系統(tǒng),建立了整車動力學(xué)模型,提出了“轉(zhuǎn)矩分配+發(fā)動機(jī)轉(zhuǎn)矩估計+電動機(jī)轉(zhuǎn)矩補償+補償系數(shù)修正”的協(xié)調(diào)控制策略;最后分別對由純電動模式切換到混合驅(qū)動模式的定工況和全工況進(jìn)行仿真,結(jié)果表明:所提出的控制策略能有效地抑制驅(qū)動模式切換過程中因不同動力源動態(tài)特性差異所造成的整車縱向沖擊,提高了汽車行駛平順性。
機(jī)電無級傳動;轉(zhuǎn)矩分配策略;協(xié)調(diào)控制;模式切換;沖擊度
前言
混合動力電動汽車具有不同的動力源,可根據(jù)行車需要選擇動力源的不同組合,使車輛運行于最佳工作模式,以提高車輛的各項性能。然而,由于發(fā)動機(jī)和電動機(jī)的動態(tài)響應(yīng)特性不同,使混合動力電動汽車在工作模式切換時,動力輸出不能及時響應(yīng)駕駛員的需求,控制不當(dāng)會造成傳動系統(tǒng)的動力中斷和轉(zhuǎn)矩波動,影響整車的動力性、平順性和乘坐舒適性。
針對這一問題,文獻(xiàn)[1]~文獻(xiàn)[3]中通過采用特有的動力耦合機(jī)構(gòu)直接實現(xiàn)對發(fā)動機(jī)轉(zhuǎn)矩的反饋,利用電動機(jī)轉(zhuǎn)矩對發(fā)動機(jī)轉(zhuǎn)矩進(jìn)行動態(tài)補償,有效地解決了動態(tài)協(xié)調(diào)問題。文獻(xiàn)[4]和文獻(xiàn)[5]中將最優(yōu)控制算法應(yīng)用到HEV驅(qū)動模式切換中,采用二次型優(yōu)化求解發(fā)動機(jī)和電動機(jī)在模式切換過程中不同階段的目標(biāo)轉(zhuǎn)矩,較好地實現(xiàn)了HEV動力平順切換。文獻(xiàn)[6]和文獻(xiàn)[7]中將混合動力驅(qū)動系統(tǒng)劃分為不同子域并設(shè)計了相應(yīng)的控制器,探討了混雜系統(tǒng)的切換控制問題。文獻(xiàn)[8]~文獻(xiàn)[10]中對單軸并聯(lián)式混合動力汽車動力切換過程中的離合器接合壓力進(jìn)行了閉環(huán)控制,提出離合器接合過程的動態(tài)轉(zhuǎn)矩控制策略,提高了動力切換的平順性。
為解決混合動力汽車在驅(qū)動過程中模式切換時可能導(dǎo)致駕駛性能變差的問題,本文中基于一種由對轉(zhuǎn)雙轉(zhuǎn)子電機(jī)和雙行星排組成的機(jī)電無級傳動混合動力驅(qū)動系統(tǒng),提出了雙轉(zhuǎn)子電機(jī)補償轉(zhuǎn)矩修正的動態(tài)協(xié)調(diào)控制策略,利用雙轉(zhuǎn)子電機(jī)快速補償發(fā)動機(jī)在工作模式切換過程中的轉(zhuǎn)矩不足,有效地減小了整車縱向沖擊度,提高了整車的駕駛性能。
1 系統(tǒng)結(jié)構(gòu)
如圖1所示,本系統(tǒng)中采用具有2個轉(zhuǎn)子的對轉(zhuǎn)雙轉(zhuǎn)子電機(jī)和具有3個輸入輸出端子的雙排行星齒輪減速機(jī)構(gòu)為主要構(gòu)件,動力耦合器前端輸入軸與發(fā)動機(jī)相連,通過定軸齒輪副把動力傳至前排行星機(jī)構(gòu)的太陽輪S1,前排行星機(jī)構(gòu)的齒圈R1與雙轉(zhuǎn)子電機(jī)外轉(zhuǎn)子Ro相連,通過前排行星齒輪機(jī)構(gòu)把兩個不同動力源的動力耦合至行星架P1,實現(xiàn)轉(zhuǎn)速轉(zhuǎn)矩的初次耦合;后排行星齒輪機(jī)構(gòu)的太陽輪S2與行星架C1固接,行星架C2固定,齒圈R2與雙轉(zhuǎn)子電機(jī)內(nèi)轉(zhuǎn)子相連,初次耦合的轉(zhuǎn)速轉(zhuǎn)矩通過后排行星齒輪機(jī)構(gòu)傳至齒圈R2,最后與內(nèi)轉(zhuǎn)子實現(xiàn)二次轉(zhuǎn)矩耦合,通過輸出軸把匯集的動力傳至驅(qū)動輪,驅(qū)動汽車行駛。當(dāng)汽車運行在不同工況時,車輛控制系統(tǒng)通過對B1、B2制動器、雙轉(zhuǎn)子電機(jī)和發(fā)動機(jī)進(jìn)行控制,便可實現(xiàn)不同工作模式時不同動力的分配與匯合;此外,該機(jī)電無級傳動變速系統(tǒng)(electronic continuously variable transmission, ECVT)兼顧機(jī)械端口和電氣端口,在進(jìn)行能量轉(zhuǎn)換與耦合分離時無需離合器與額外的起動電動機(jī),具備在較寬速比范圍內(nèi)實現(xiàn)無級變速傳動、使發(fā)動機(jī)在變負(fù)載情況下均能運行于最佳燃油經(jīng)濟(jì)線上,在減少燃油消耗、提升效率、優(yōu)化發(fā)動機(jī)性能等方面具有很大優(yōu)勢[11]。表1為混合動力系統(tǒng)的主要部件及參數(shù)。
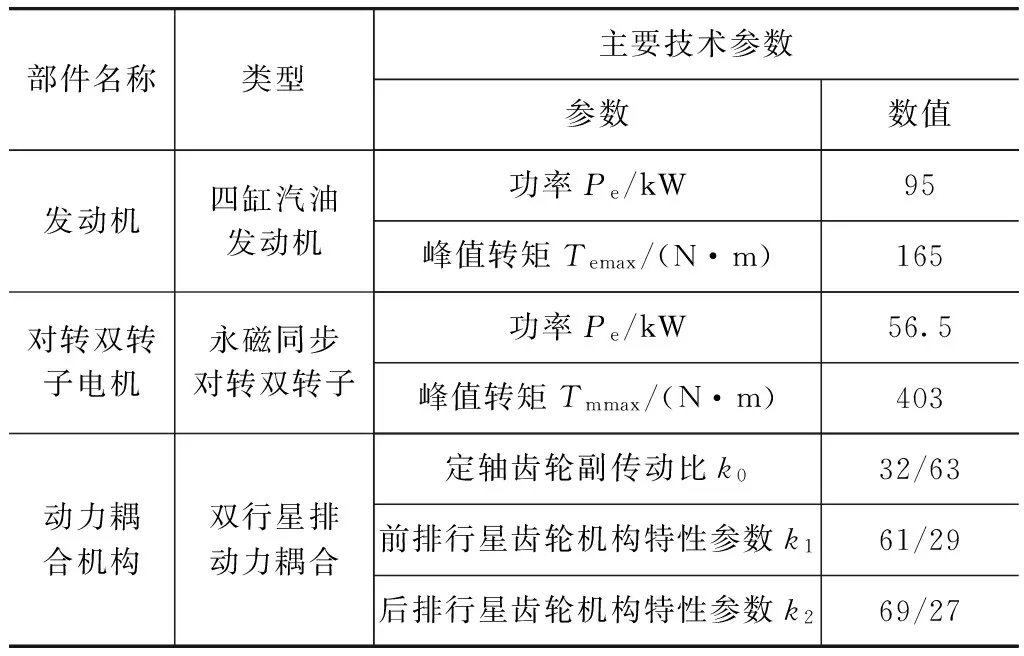
表1 混合動力系統(tǒng)的主要部件及參數(shù)
2 整車建模
2.1 發(fā)動機(jī)模型
穩(wěn)態(tài)情況下,發(fā)動機(jī)輸出轉(zhuǎn)矩是其節(jié)氣門開度和轉(zhuǎn)速的函數(shù),本文中利用發(fā)動機(jī)試驗數(shù)據(jù),采用多項式擬合的方法建立發(fā)動機(jī)模型,同時考慮發(fā)動機(jī)在起動、變速等情況下,油門開度變化迅速,發(fā)動機(jī)達(dá)到穩(wěn)態(tài)須經(jīng)歷一個動態(tài)過程,故將發(fā)動機(jī)模型簡化為2階傳遞函數(shù)來估計發(fā)動機(jī)的動態(tài)轉(zhuǎn)矩輸出響應(yīng)[12]:
(1)
式中:Teng_act為發(fā)動機(jī)實際輸出轉(zhuǎn)矩,N·m;ξ為2階系統(tǒng)阻尼比;ωn為發(fā)動機(jī)固有頻率,rad/s;Teng_desired為發(fā)動機(jī)的目標(biāo)轉(zhuǎn)矩,N·m。
2.2 雙轉(zhuǎn)子電機(jī)模型
本文中采用的新型對轉(zhuǎn)雙轉(zhuǎn)子電機(jī),利用作用力和反作用力原理,將傳統(tǒng)的定子也作為轉(zhuǎn)子,與原來的電機(jī)轉(zhuǎn)子做反向運動,具有與永磁同步電機(jī)相同的電氣特性[13],根據(jù)試驗獲得雙轉(zhuǎn)子電機(jī)的效率特性模型,可把對轉(zhuǎn)雙轉(zhuǎn)子電機(jī)的轉(zhuǎn)矩輸出特性采用1階慣性環(huán)節(jié)進(jìn)行動態(tài)修正[7]:
(2)
式中:Tmi、Tmo分別為雙轉(zhuǎn)子電機(jī)內(nèi)、外轉(zhuǎn)子實際輸出轉(zhuǎn)矩,N·m;τm為電機(jī)時間常數(shù),s;η為電子節(jié)氣門開度;Tmr為電動機(jī)請求轉(zhuǎn)矩,N·m。
2.3 制動器模型
由系統(tǒng)結(jié)構(gòu)分析可知,系統(tǒng)具有多種工作模式的關(guān)鍵是制動器的工作狀態(tài)的切換,在給制動器發(fā)出接合和分離信號后,制動器并不能馬上完成所需動作,具有一定時間的延遲,故將制動器的控制信號采用了1階延遲模塊來模擬制動器的動作[12]:
(3)
式中:Tbrake為制動器制動轉(zhuǎn)矩,N·m;τ為制動及分離信號的時間常數(shù),s。
2.4 動力耦合器動力學(xué)建模
對于該機(jī)電無級混合動力驅(qū)動系統(tǒng),由于總成系統(tǒng)中引入了雙排2自由度的行星齒輪機(jī)構(gòu)的動力耦合裝置,具有多個旋轉(zhuǎn)部件,鑒于模擬杠桿法可將這個旋轉(zhuǎn)運動系統(tǒng)模擬人們熟悉的直線運動系統(tǒng),在處理復(fù)雜多自由度旋轉(zhuǎn)系統(tǒng)時具有很大優(yōu)勢,因此以模擬杠桿法快速建立系統(tǒng)的數(shù)學(xué)模型[14-15],并做如下假設(shè):(1)只考慮汽車縱向動力學(xué);(2)忽略系統(tǒng)的能量損失;(3)忽略系統(tǒng)阻尼、剛度。
圖2為動力耦合機(jī)構(gòu)模擬杠桿圖,采用隔離法建立模型,分別以發(fā)動機(jī)、定軸齒輪副、制動器B1和前排太陽輪為整體得式(4),以前排齒圈、外轉(zhuǎn)子為研究整體得式(5),以內(nèi)轉(zhuǎn)子和行星齒圈為研究整體得式(6),根據(jù)行星齒輪機(jī)構(gòu)特性得式(7)。

(4)
(5)
(6)
(7)
依次建立駕駛員模型、動力電池模型、主減速器(差速器)模型、輪胎和車輛縱向動力學(xué)模型,限于篇幅和研究的重點,本文中未予列出。
3 控制策略
3.1 轉(zhuǎn)矩分配策略
轉(zhuǎn)矩分配策略屬于混合動力系統(tǒng)的能量管理范疇,主要包括3部分:根據(jù)駕駛員模型和電池模型及轉(zhuǎn)矩計算模塊確定總需求轉(zhuǎn)矩;根據(jù)控制策略確定工作模式的切換條件;根據(jù)控制策略確定各工作模式下的目標(biāo)轉(zhuǎn)矩。由于基于規(guī)則的轉(zhuǎn)矩分配策略可靠性好、實用性強(qiáng),本文中根據(jù)雙轉(zhuǎn)子電動機(jī)和發(fā)動機(jī)穩(wěn)態(tài)萬有特性圖,以發(fā)動機(jī)和雙轉(zhuǎn)子電動機(jī)轉(zhuǎn)矩為直接控制對象,根據(jù)駕駛員模型計算所需的轉(zhuǎn)矩,采用最佳的轉(zhuǎn)矩分配規(guī)則使控制系統(tǒng)運行。針對系統(tǒng)的結(jié)構(gòu)和轉(zhuǎn)矩控制策略,可得到系統(tǒng)的主要工作模式,如表2所示。

表2 混合動力系統(tǒng)工作模式
注:本文中雙轉(zhuǎn)子電機(jī)為內(nèi)繞組、外永磁體結(jié)構(gòu),外轉(zhuǎn)子并不真實發(fā)電,但當(dāng)其相對內(nèi)轉(zhuǎn)子轉(zhuǎn)動時,內(nèi)轉(zhuǎn)子會產(chǎn)生電流,為方便區(qū)分,把此種情況定義為外轉(zhuǎn)子工作于發(fā)電狀態(tài)。
3.2 動態(tài)協(xié)調(diào)控制策略
協(xié)調(diào)控制中涉及兩個被控對象,基于發(fā)動機(jī)和雙轉(zhuǎn)子電機(jī)的動態(tài)響應(yīng)特性的較大差異,采用“轉(zhuǎn)矩分配+發(fā)動機(jī)轉(zhuǎn)矩估計+電動機(jī)轉(zhuǎn)矩補償+補償系數(shù)修正”的方法,即根據(jù)總需求轉(zhuǎn)矩和轉(zhuǎn)矩分配策略確定發(fā)動機(jī)和電動機(jī)的目標(biāo)轉(zhuǎn)矩(式(8)),然后利用發(fā)動機(jī)模型對其進(jìn)行動態(tài)轉(zhuǎn)矩估計,再用雙轉(zhuǎn)子電機(jī)的轉(zhuǎn)矩對發(fā)動機(jī)在動態(tài)變化過程中的實際轉(zhuǎn)矩與目標(biāo)轉(zhuǎn)矩的差值進(jìn)行補償(式(9)),由于策略中發(fā)動機(jī)轉(zhuǎn)矩是由發(fā)動機(jī)模型直接估算,發(fā)動機(jī)試驗及模型參數(shù)確定中可能存在偏差,導(dǎo)致發(fā)動機(jī)實際轉(zhuǎn)矩的估計存在偏差,直接補償可能會影響控制策略的精確度,因此最后采用補償修正系數(shù)對雙轉(zhuǎn)子電機(jī)補償轉(zhuǎn)矩進(jìn)行修正(式(10)),當(dāng)滿足一定條件時,動態(tài)協(xié)調(diào)控制結(jié)束。
Tmr=Tt_req-Teng_desired
(8)
TSwitch_mr=(Teng_desired-Teng_act)+Tmr
(9)
TSwitch_mr=k(Teng_desired-Teng_act)+Tmr
(10)
式中:Tt_req為總需求轉(zhuǎn)矩,N·m;TSwitch_mr為模式切換時補償控制后的雙轉(zhuǎn)子電機(jī)目標(biāo)轉(zhuǎn)矩,N·m;k為補償修正系數(shù)。其流程圖如圖3所示。
由機(jī)電無級傳動混合動力驅(qū)動系統(tǒng)結(jié)構(gòu)和表2知,系統(tǒng)通過雙排行星齒輪機(jī)構(gòu)把對轉(zhuǎn)雙轉(zhuǎn)子電機(jī)和發(fā)動機(jī)動力進(jìn)行耦合,有多種工作模式,其中,系統(tǒng)由純電動模式③切換至混合驅(qū)動H2模式⑦時,切換過程中不僅需要發(fā)動機(jī)起動,制動器B1分離,制動器B2接合等復(fù)雜過程,且系統(tǒng)傳動特性產(chǎn)生躍變,較大沖擊對混合動力系統(tǒng)壽命和整車平順性產(chǎn)生不利影響,此外,在切換過程中必須瞬間經(jīng)過混合驅(qū)動模式⑥,因此本文中以純電動模式③切換至混合驅(qū)動H2模式⑦為例作動態(tài)協(xié)調(diào)控制策略算例研究,將此過程統(tǒng)稱為純電動切換至混合驅(qū)動。
模式切換前,系統(tǒng)運行于純電動模式③,外轉(zhuǎn)子輸出轉(zhuǎn)矩經(jīng)前排行星齒輪機(jī)構(gòu)耦合至行星架,再經(jīng)第2排行星齒輪機(jī)構(gòu)傳至后排齒圈,最后與內(nèi)轉(zhuǎn)子實現(xiàn)轉(zhuǎn)矩耦合,由式(6)有
(11)
又根據(jù)行星齒輪及結(jié)構(gòu)特性有
Tc1=-(1+k1)Tmo=(1+k1)Tmi
(12)
故輸出轉(zhuǎn)矩為
(3)在防治校園欺凌的教育方面學(xué)校的管理要有針對性,注重對學(xué)生個體的關(guān)注。調(diào)查中發(fā)現(xiàn),學(xué)生的性別、年級、等因素都會導(dǎo)致學(xué)生對欺凌行為的認(rèn)知差異。農(nóng)村初中生中大部分為留守學(xué)生,父母在情感陪伴上的缺失使他們更易出現(xiàn)心理失衡,因此學(xué)校要督促教師積極關(guān)心學(xué)生的心理健康,及時了解學(xué)生的情緒變化、家庭情況等,做好家校溝通。
(13)
同理可得模式切換后,在混合驅(qū)動H2模式⑦下,混合動力系統(tǒng)總輸出轉(zhuǎn)矩與發(fā)動機(jī)轉(zhuǎn)矩和雙轉(zhuǎn)子電機(jī)轉(zhuǎn)矩的關(guān)系為
(14)
模式切換過程中,制動器B2接合,制動器B1分離,混合動力系統(tǒng)總輸出轉(zhuǎn)矩與發(fā)動機(jī)轉(zhuǎn)矩和雙轉(zhuǎn)子電機(jī)轉(zhuǎn)矩的關(guān)系同式(14),根據(jù)動態(tài)協(xié)調(diào)控制策略,動態(tài)補償后,雙轉(zhuǎn)子電機(jī)的目標(biāo)轉(zhuǎn)矩為
TSwitch_mr=kk0(1+k1)k2(Teng_desired-Teng_act)+Tmr
(15)
4 仿真及分析
評價汽車駕駛性能的方法有主觀評價法和客觀評價法,為了客觀地量化車輛的駕駛性能,以整車加速度的變化率,即沖擊度作為評價指標(biāo),利用MATLAB/Simulink/Stateflow建立整車車輛動力學(xué)前向仿真模型,建立轉(zhuǎn)矩分配策略和動態(tài)協(xié)調(diào)控制策略,對未考慮和考慮模式切換協(xié)調(diào)控制的由純電動驅(qū)動切換到混合驅(qū)動的整車協(xié)調(diào)控制策略進(jìn)行仿真。
4.1 定工況仿真
在定工況中,混合動力電動汽車的工作模式與發(fā)動機(jī)和雙轉(zhuǎn)子電機(jī)的目標(biāo)轉(zhuǎn)矩皆預(yù)先設(shè)定,無須轉(zhuǎn)矩管理策略對兩者轉(zhuǎn)矩進(jìn)行分配,主要用來考察混合動力驅(qū)動系統(tǒng)轉(zhuǎn)矩輸出的情況和動態(tài)協(xié)調(diào)控制策略在特定工況下的控制效果。以純電動向混合動力切換過程為例,以動力耦合機(jī)構(gòu)輸出端總的需求轉(zhuǎn)矩維持在715.5N·m為目標(biāo),對動力源進(jìn)行轉(zhuǎn)矩分配。
圖4為定工況未加動態(tài)協(xié)調(diào)控制各變量的變化。如圖所示,在第5s左右,混合動力驅(qū)動系統(tǒng)的工作模式發(fā)生切換,切換前后發(fā)動機(jī)的目標(biāo)轉(zhuǎn)矩由0變?yōu)?18.6N·m,雙轉(zhuǎn)子電機(jī)目標(biāo)轉(zhuǎn)矩由150變?yōu)?38.5N·m,但由于發(fā)動機(jī)對節(jié)氣門信號響應(yīng)滯后及燃油系統(tǒng)存在超調(diào),使發(fā)動機(jī)轉(zhuǎn)矩響應(yīng)滯后且超調(diào),而雙轉(zhuǎn)子電機(jī)具有較好的動態(tài)響應(yīng)特性基本能夠及時響應(yīng)轉(zhuǎn)矩請求,導(dǎo)致動力耦合機(jī)構(gòu)輸出總轉(zhuǎn)矩在模式切換瞬間產(chǎn)生較大波動,進(jìn)而造成一個超過10m/s3的沖擊度(-11.715m/s3)。此外,在模式切換過程中,由于動力耦合機(jī)構(gòu)輸出總轉(zhuǎn)矩?zé)o法滿足目標(biāo)總轉(zhuǎn)矩,造成混合動力驅(qū)動系統(tǒng)動力性瞬間下降,對駕駛性能產(chǎn)生不利影響。
圖5為定工況施加動態(tài)協(xié)調(diào)控制各變量的變化。如圖所示,采用動態(tài)協(xié)調(diào)控制算法后,利用雙轉(zhuǎn)子電機(jī)及時補償發(fā)動機(jī)的轉(zhuǎn)矩,使動力耦合器實際總輸出轉(zhuǎn)矩的波動、車身加速度和整車沖擊度(-0.987 2m/s3)明顯減小,保證了狀態(tài)切換過程中動力傳動的平穩(wěn)性,可見,在該機(jī)電無級混合動力驅(qū)動系統(tǒng)模式切換時,所提出的動態(tài)控制策略能較好地保證混合動力汽車的動力性要求,同時保證了系統(tǒng)動力傳遞的平穩(wěn)性,降低了傳動系統(tǒng)的沖擊,提高了駕駛性能。
4.2 全工況仿真
全工況仿真是指根據(jù)工況需要,駕駛員模塊根據(jù)目標(biāo)車速和實際車速的差值產(chǎn)生踏板行程參數(shù)后,隨踏板行程、車速和蓄電池荷電狀態(tài)等參數(shù)的變化確定總變速器輸出軸的目標(biāo)轉(zhuǎn)矩,再根據(jù)確定的轉(zhuǎn)矩控制策略,確定混合動力系統(tǒng)的運行模式和發(fā)動機(jī)、雙轉(zhuǎn)子電機(jī)目標(biāo)轉(zhuǎn)速轉(zhuǎn)矩。全工況仿真中的控制算法,既要減小發(fā)動機(jī)和電動機(jī)轉(zhuǎn)矩之和的波動及控制沖擊度的大小,還要保證發(fā)動機(jī)與雙轉(zhuǎn)子電機(jī)的轉(zhuǎn)矩之和符合駕駛員對目標(biāo)轉(zhuǎn)矩的需求,以滿足車輛動力學(xué)和燃油經(jīng)濟(jì)性。
圖6為全工況時的輸入目標(biāo)車速,是全工況仿真的工況輸入,結(jié)合所開發(fā)的車型,以美國城市循環(huán)工況UDDS為全工況目標(biāo)輸入車速。
圖7~圖9為全工況時,未施加動態(tài)協(xié)調(diào)控制,系統(tǒng)由純電動起動切換到混合驅(qū)動過程中相關(guān)參數(shù)的變化。由圖可見,隨著車速的增加,為減小蓄電池的能量消耗并使發(fā)動機(jī)工作于高效區(qū),模式切換發(fā)生在23.25s,在模式切換瞬間產(chǎn)生一個很大的沖擊度(-41.944m/s3),一方面因汽車加速度需求瞬間減小,另一方面由于發(fā)動機(jī)未能及時響應(yīng)目標(biāo)轉(zhuǎn)矩,大大超過了乘客感覺舒服的沖擊度上限值(德國制定的沖擊度上限值為10m/s3),將嚴(yán)重影響車輛的駕駛性能和乘坐舒適性。
圖10~圖12為全工況時,施加動態(tài)協(xié)調(diào)控制,系統(tǒng)由純電動起動切換到混合驅(qū)動過程中相關(guān)參數(shù)的變化。由圖可見,系統(tǒng)模式切換的時間有所增加(0.1s),盡管在模式切換時,系統(tǒng)的加速度目標(biāo)值產(chǎn)生較大變化,但雙轉(zhuǎn)子電機(jī)轉(zhuǎn)矩能有效補充發(fā)動機(jī)轉(zhuǎn)矩,使整車最大沖擊度明顯地減小(-9.470 3m/s3),在合理范圍之內(nèi)。
綜上所述,無論是定工況還是全工況,系統(tǒng)在施加動態(tài)協(xié)調(diào)控制后,最大轉(zhuǎn)矩偏差和最大沖擊度都明顯減小,如表3所示。

表3 模式切換仿真結(jié)果對比
5 結(jié)論
基于一種新型機(jī)電無級傳動混合動力驅(qū)動系統(tǒng),針對由于發(fā)動機(jī)與電動機(jī)動態(tài)響應(yīng)的較大差異而引起的轉(zhuǎn)矩大幅波動,提出了典型工作模式切換過程中的轉(zhuǎn)矩協(xié)調(diào)控制策略,并進(jìn)行了定工況和全工況仿真對比驗證,定工況和全工況仿真結(jié)果均表
明,在施加動態(tài)協(xié)調(diào)控制策略后整車沖擊度明顯降低,行駛平順性明顯提高,證明了提出的動態(tài)協(xié)調(diào)控制策略能有效地解決并聯(lián)混合動力汽車在工作模式切換過程中轉(zhuǎn)矩大幅波動的問題。
[1] Akihiro K, Tetsuya A, Shoichi S. Driving Force Control of a Parallel-Series Hybrid System[J]. JSAE Review,1999,20(3):337-341.
[2] Yoshioka. Noise and Vibration Reduction Technology in Hybrid Vehicle Development[C]. SAE Paper 2001-01-1415.
[3] Dimitrios Rizoulis, Jeffrey Burl, John Beard. Control Strategies for a Series-Parallel Hybrid Electric Vehicle[C]. SAE Paper 2001-01-1354.
[4] Guzzella L, Sciarretta A. Vehicle Propulsion System[M]. Berlin Heidelberg: Springer,2007.
[5] 閆曉磊,鐘勇,鐘志華.HEV系統(tǒng)動力平順性切換最優(yōu)控制研究[J].汽車工程,2008,30(4):28-30.
[6] Korowais K, Westervelt E, Rizzoni G. Toward the Systematic Design of Controllers for Smooth Hybrid Electric Vehicle Mode Changes[C]. The American Automatic Control Council. Proceedings of the 2007 American Control Conference, New York, AACC,2007:2985-2990.
[7] 趙治國,何寧,朱陽,等.四輪驅(qū)動混合動力轎車驅(qū)動模式切換控制[J].機(jī)械工程學(xué)報,2011,47(4):100-109.
[8] Kim Sangjoon, Park Joonyoun. Transient Control Strategy of Hybrid Electric Vehicle During Mode Change[C]. SAE Paper 2009-01-0228.
[9] 倪成群,張幽彤,趙強(qiáng),等.混合動力離合器結(jié)合過程的動態(tài)轉(zhuǎn)矩控制策略[J].機(jī)械工程學(xué)報,2013,49(4):115-121.
[10] 戴一凡,羅禹貢,李克強(qiáng),等.單電機(jī)強(qiáng)混合動力電動汽車輛的動態(tài)協(xié)調(diào)控制[J].汽車工程,2011,33(12):1008-1012.
[11] Chau K T, Chan C C. Emerging Energy-efficient Technologies for Hybrid Electric Vehicles[J]. Proceeding of IEEE,2007,95(4):821-835.
[12] Fazal Urrahman Syed. Modeling and Control Methods for Improving Drivability Power Management[D]. Detroit: Wayne State University,2008.
[13] 鄧志君,羅玉濤,周斯加,等.新型車用對轉(zhuǎn)雙轉(zhuǎn)子電機(jī)的研究[J].電氣傳動,2007,37(7):10-13.
[14] 于永濤.混聯(lián)式混合動力車輛優(yōu)化設(shè)計與控制[D].長春:吉林大學(xué),2010.
[15] 方偉榮,黃宗益,李新華.行星變速器的有效工具[J].上海汽車,2003,4(1):1-4.
Coordinated Control for the Mode Switching of HEV Powertrainwith Electro-mechanical Variable Transmission
Luo Yutao1,2& Wang Fuwen1,2
1.CollegeofMechanicalandAutomotiveEngineering,SouthChinaUniversityofTechnology,Guangzhou510640;2.GuangdongProvincialKeyLabofAutomotive,Guangzhou510640
An electro-mechanical variable transmission for hybrid power drive system is developed, which consists of a double-rotor motor and a two-row planetary gear set. Then a vehicle dynamics model is build and a coordinated control algorithm of “motor torque compensation and correction after torque pre-distribution and engine torque estimation” is proposed. Finally, simulations on the switching from pure electric mode to hybrid drive mode in two different conditions are performed. The results show that the proposed control strategy can effectively suppress the longitudinal jerk of vehicle caused by the discrepancy between dynamic characteristics of different power sources in the process of drive mode switching, and hence improve the ride comfort of vehicle.
electro-mechanical variable transmission; torque distribution strategy; coordinated control; mode switching; jerk
*國家863計劃項目(2012AA110702)、教育部新世紀(jì)優(yōu)秀人才計劃(NCET-2011-0157)和中央高校基本科研業(yè)務(wù)費(2013ZM0125)資助。
原稿收到日期為2013年7月10日,修改稿收到日期為2013年9月27日。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
