四軸車輛全輪轉(zhuǎn)向之自動(dòng)模式研究*
2015-04-12 05:23:25陳思忠鄭凱鋒
汽車工程 2015年7期
陳思忠,鄭凱鋒
(1.北京理工大學(xué)機(jī)械與車輛學(xué)院,北京 100081; 2.中國(guó)北方車輛研究所,北京 100072)
?
2015143
四軸車輛全輪轉(zhuǎn)向之自動(dòng)模式研究*
陳思忠,鄭凱鋒
(1.北京理工大學(xué)機(jī)械與車輛學(xué)院,北京 100081; 2.中國(guó)北方車輛研究所,北京 100072)
在第2軸轉(zhuǎn)角比例于第1軸轉(zhuǎn)角,第3軸轉(zhuǎn)角比例于第4軸轉(zhuǎn)角的條件下,從理論上分析了全輪轉(zhuǎn)向與雙前橋轉(zhuǎn)向之間的差異。接著以質(zhì)心側(cè)偏角為零,設(shè)計(jì)了控制器一和控制器二兩種控制器,并再次分析了雙前橋轉(zhuǎn)向、帶控制器一的全輪轉(zhuǎn)向和帶控制器二的全輪轉(zhuǎn)向三者之間的區(qū)別與聯(lián)系,為四軸車輛的全輪轉(zhuǎn)向技術(shù)的研究提供了理論參考。
四軸車輛;全輪轉(zhuǎn)向;自動(dòng)模式
前言
隨著四軸車輛在重型貨車和軍用戰(zhàn)術(shù)型車輛上的廣泛應(yīng)用,輪胎磨損嚴(yán)重、轉(zhuǎn)彎半徑大和操縱穩(wěn)定性差等問題愈加突顯。全輪轉(zhuǎn)向技術(shù)可謂是解決這些問題的最佳方案。為充分發(fā)揮全輪轉(zhuǎn)向的優(yōu)勢(shì),四軸車輛的全輪轉(zhuǎn)向至少應(yīng)具有4種模式,分別是最小轉(zhuǎn)彎半徑模式(MinR)、蟹行模式(Crab)、傳統(tǒng)模式也稱雙前橋轉(zhuǎn)向模式(F4ws)和自動(dòng)模式(Auto),如圖1所示。MinR模式下后兩橋與前兩橋呈逆向轉(zhuǎn)向,適用于車輛的大角度轉(zhuǎn)彎或調(diào)頭;Crab模式下后兩橋與前兩橋同向轉(zhuǎn)向,適用車輛的橫向移位或爬橫坡。前兩種模式僅適用于低速行駛,而F4ws和Auto模式則適用于整個(gè)車速范圍。其中,F(xiàn)4ws模式下,后兩橋不轉(zhuǎn)向,它是一種安全模式,當(dāng)控制器掉電或損壞、傳感器失效等發(fā)生時(shí)都將觸發(fā)此模式;Auto模式可以根據(jù)車速和車輛狀態(tài)調(diào)節(jié)成前后逆向轉(zhuǎn)向或前后同向轉(zhuǎn)向,以達(dá)到改善低速時(shí)的機(jī)動(dòng)性和高速時(shí)的操縱穩(wěn)定性的目的。在較多研究中表明以零質(zhì)心側(cè)偏角設(shè)計(jì)Auto模式的控制器有很好的性能[1-2],但多數(shù)是針對(duì)兩軸或三軸車設(shè)計(jì)的,對(duì)四軸車研究較少。另外,所設(shè)計(jì)的控制多以仿真為主,缺乏理論分析。本文中側(cè)重于理論分析,研究雙前橋轉(zhuǎn)向、以第1軸轉(zhuǎn)角和車速為輸入及以穩(wěn)態(tài)零質(zhì)心側(cè)偏角為目標(biāo)的全輪轉(zhuǎn)向控制器一和在控制器一的基礎(chǔ)上增加橫擺角速度反饋形成的控制器二這三者之間的區(qū)別與聯(lián)系。
1 四軸車輛的全輪轉(zhuǎn)向基本特性
1.1 雙前橋轉(zhuǎn)向(F4ws模式)
保留原有四軸車輛的雙前橋轉(zhuǎn)向傳動(dòng)機(jī)構(gòu),在第3和第4橋添置電控液壓轉(zhuǎn)向系統(tǒng),可最容易地實(shí)現(xiàn)四軸車輛的全輪轉(zhuǎn)向。合理地設(shè)計(jì)雙前橋轉(zhuǎn)向傳動(dòng)機(jī)構(gòu)可使前兩軸的車輪都繞同一轉(zhuǎn)向中心轉(zhuǎn)向,同時(shí),在轉(zhuǎn)角20°內(nèi),可保證第1軸車輪的轉(zhuǎn)角與第2軸車輪的轉(zhuǎn)角成比例關(guān)系[3]。同前兩軸一樣,可設(shè)定第3軸轉(zhuǎn)角與第4軸轉(zhuǎn)角也成比例關(guān)系,這樣既方便了對(duì)控制器的設(shè)計(jì)也有助于對(duì)全輪轉(zhuǎn)向特性的理論分析。在以上假設(shè)條件下,四軸車輛的線性2自由度模型[4]可寫為
(1)
其中
(2)
式中:m為整車質(zhì)量;u為車輛縱向速度;Li為整車質(zhì)心到第i軸的距離(此距離具有方向性,與行車方向一致為正,反之為負(fù));Ci為第i軸的輪胎側(cè)偏剛度(左、右輪胎剛度之和);Iz為整車的橫擺轉(zhuǎn)動(dòng)慣量;β為質(zhì)心側(cè)偏角;r為橫擺角速度;δi為第i軸中間虛擬車輪轉(zhuǎn)角,簡(jiǎn)稱第i軸轉(zhuǎn)角;δ2=d1δ1;δ3=d2δ4;d1,d2為大于零小于1的常數(shù)。
對(duì)式(1)進(jìn)行Laplace變換并化簡(jiǎn)可得
(3)
(4)
其中
(5)
對(duì)P1進(jìn)行分析,可知
(6)
式中um定義為轉(zhuǎn)折速度:
(7)
當(dāng)選擇F4ws模式時(shí),即令δ4=0,車輛的穩(wěn)態(tài)質(zhì)心側(cè)偏角和穩(wěn)態(tài)橫擺角速度分別為
(8)
(9)
式(9)中廣義軸距[4]可寫為
lm=P1/P3
(10)
廣義的不足轉(zhuǎn)向系數(shù)[4]可寫為
K=-Cbm/P3
(11)
顯然,K的正負(fù)取決于Cb。當(dāng)Cb>0時(shí),K<0,車輛在F4ws轉(zhuǎn)向模式下屬于過多轉(zhuǎn)向,當(dāng)Cb<0時(shí),K>0,屬于不足轉(zhuǎn)向;當(dāng)Cb=0時(shí),K=0,屬于中性轉(zhuǎn)向。車輛在F4ws模式下應(yīng)具有適當(dāng)?shù)牟蛔戕D(zhuǎn)向,以保證行駛的穩(wěn)定性,即應(yīng)保證Cb<0。
1.2 全輪轉(zhuǎn)向
以上討論了F4ws模式下的基本特性,下面討論Auto模式的情況,并與F4ws模式作對(duì)比。Auto模式下車輛的穩(wěn)態(tài)質(zhì)心側(cè)偏角為
(12)
兩種模式下的穩(wěn)態(tài)質(zhì)心側(cè)偏角之差為
Eβ=|β(s)|Auto,s=0|-|β(s)|F4ws,s=0|=
(|P1δ1(s)+P2δ4(s)|-|P1δ1(s)|)/P0
(13)
Auto模式下的穩(wěn)態(tài)橫擺角速度為
(14)
兩種模式下的穩(wěn)態(tài)橫擺角速度之差為
(15)
由式(13)~式(15)可知,當(dāng)u≤um且δ1δ4<0時(shí),有Eβ≤0,Er≥0;當(dāng)u≥um且δ1δ4>0,有Eβ≤0,Er≤0。即當(dāng)車速小于轉(zhuǎn)折車速,后兩橋輸入與前兩橋逆向轉(zhuǎn)向時(shí),可減小車輛的質(zhì)心側(cè)偏角,增大穩(wěn)態(tài)橫擺角速度;當(dāng)車速大于轉(zhuǎn)折車速,后兩橋輸入與前兩橋同向轉(zhuǎn)向時(shí),可減小車輛的質(zhì)心側(cè)偏角,同時(shí)降低橫擺角速度。此特性不因控制算法不同而改變,反映了以式(1)為基礎(chǔ)設(shè)計(jì)Auto模式下的控制器時(shí),全輪轉(zhuǎn)向的本質(zhì)特性。
2 全輪轉(zhuǎn)向Auto模式控制器設(shè)計(jì)
2.1 控制器一(Auto-Con1)
根據(jù)式(12),以穩(wěn)態(tài)零質(zhì)心側(cè)偏角為目標(biāo)設(shè)計(jì)第4軸轉(zhuǎn)角可得
(16)
式(16)給出的控制器滿足了車輛在轉(zhuǎn)折車速前實(shí)現(xiàn)逆向轉(zhuǎn)向,轉(zhuǎn)折車速后實(shí)現(xiàn)同向轉(zhuǎn)向,使低速和高速時(shí)質(zhì)心側(cè)偏角都減小。
將控制器式(16)經(jīng)過Laplace變換后分別代入式(3)和式(4),可得質(zhì)心側(cè)偏角和橫擺角速度對(duì)第1軸轉(zhuǎn)角的閉環(huán)傳遞函數(shù)為
(17)
(18)
其中
P5=(L1C1+d1L2C2)(C4+d2C3)-
(L4C4+d2L3C3)(C1+d1C2)>0
(19)
由式(18)可知穩(wěn)態(tài)時(shí)的橫擺角速度為
(20)
令式(18)等號(hào)右邊分式的分母為零,對(duì)其求解即可分析車輛采用控制器一時(shí)系統(tǒng)的穩(wěn)定性。對(duì)比式(17)、式(18)與式(3)、式(4)可見,在控制器一作用下,F(xiàn)4ws模式與Auto模式下控制器一具有相同的特征多項(xiàng)式,說(shuō)明控制器一的加入并未改變系統(tǒng)的穩(wěn)定性。
2.2 控制器二(Auto-Con2)
控制器一實(shí)際上以車速和第1軸轉(zhuǎn)角作為變量計(jì)算第4軸的轉(zhuǎn)角,并未考慮車輛的狀態(tài);在此基礎(chǔ)上增加橫擺角速度反饋,則成為控制器二。
將式(1)的質(zhì)心側(cè)偏角微分方程重寫為
(21)
令式(21)的質(zhì)心側(cè)偏角及其變化率為零,則可得第4軸轉(zhuǎn)角為
(22)
將控制器式(22)代入式(1)原車輛方程并進(jìn)行Laplace變換,可得質(zhì)心側(cè)偏角和橫擺角速度對(duì)第1軸轉(zhuǎn)角的閉環(huán)傳遞函數(shù)為
(23)
(24)
其中
(25)
根據(jù)式(24)可知穩(wěn)態(tài)時(shí)橫擺角速度為
(26)
將式(26)代入式(22)可得穩(wěn)態(tài)時(shí)第4軸轉(zhuǎn)角為
(27)
對(duì)比式(26)和式(20)可以看出,穩(wěn)態(tài)時(shí)控制器二和控制器一的橫擺角速度相等,其原因由式(27)與式(16)可知,穩(wěn)態(tài)時(shí)控制器二的第4軸轉(zhuǎn)角輸出與控制器一的相同。因此,以質(zhì)心側(cè)偏角為零設(shè)計(jì)出的具有反饋橫擺角速度的控制器二與不具備反饋橫擺角速度的控制器一在穩(wěn)態(tài)轉(zhuǎn)向時(shí)的效果一致,不同之處在于瞬態(tài)過程。控制器二在瞬態(tài)時(shí)具有盡量保持有較小的質(zhì)心側(cè)偏角的能力,而控制器一沒有。另外,控制器二改變了系統(tǒng)的特征根。表1為車輛參數(shù),以此車特性參數(shù)進(jìn)行仿真分析。
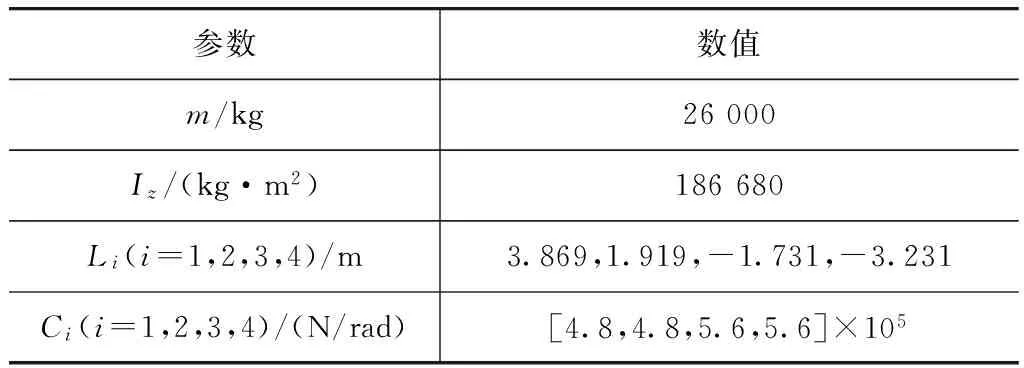
表1 車輛參數(shù)
圖2為以車速為參變量繪制的特征根曲線圖,用以對(duì)比兩種控制下特征根的特性。
從圖2中可以看出,由控制器一和控制器二分別組成的閉環(huán)系統(tǒng)的兩個(gè)特征根s1和s2都在負(fù)半軸,即系統(tǒng)是穩(wěn)定的。對(duì)于控制器一,在低速時(shí),具有兩個(gè)負(fù)實(shí)根,在高速時(shí),具有一對(duì)共軛復(fù)根,即當(dāng)車速?gòu)牡退僭鲋粮咚贂r(shí),車輛由過阻尼系統(tǒng)轉(zhuǎn)變?yōu)榍纷枘嵯到y(tǒng)。而對(duì)于控制器二,車輛一直處于過阻尼狀態(tài)。
3 Auto模式下穩(wěn)態(tài)分析
在穩(wěn)態(tài)時(shí),控制器一與控制器二的第4軸轉(zhuǎn)角和橫擺角速度相同。在此,以車速和第1軸轉(zhuǎn)角為變量,代入車輛參數(shù)分析第4軸轉(zhuǎn)角和穩(wěn)態(tài)橫擺角速度的變化特性,仿真結(jié)果如圖3和圖4所示。
從圖3可以看出,隨著車速的增加,第4軸由與第1軸逆向轉(zhuǎn)向逐漸轉(zhuǎn)變?yōu)榕c第1軸同向轉(zhuǎn)向,其轉(zhuǎn)折車速為51km/h。從圖4中可以看出,在轉(zhuǎn)折車速前,Auto模式下的穩(wěn)態(tài)橫擺角速度要大于F4ws模式下的穩(wěn)態(tài)橫擺角速度,即駕駛員以相同的橫擺角速度進(jìn)行轉(zhuǎn)彎時(shí),Auto模式下駕駛員對(duì)轉(zhuǎn)向盤的輸入轉(zhuǎn)角要比F4ws時(shí)小,降低了駕駛員的操作強(qiáng)度;在轉(zhuǎn)折車速后,情況正好相反,即駕駛員須多打轉(zhuǎn)向盤來(lái)完成轉(zhuǎn)向,這樣提高了車輛的行駛穩(wěn)定性。另外,從圖3和圖4中可以看出,處于轉(zhuǎn)折車速時(shí),第4軸轉(zhuǎn)角為零,相應(yīng)的橫擺角速度相等。從式(7)中可以看出,當(dāng)車輛特性參數(shù)給定時(shí),容易改變的參數(shù)是d1,它與轉(zhuǎn)折車速的關(guān)系如圖5所示。
從圖5中可以看出,d1從0變化到1.0時(shí),轉(zhuǎn)折車速接近線性地由46km/h上升到53km/h。另外,從實(shí)際情況考慮,d1的設(shè)計(jì)要考慮輪胎磨損且受限于安裝空間,其可變范圍很小。所以,當(dāng)車輛特性參數(shù)確定后,其轉(zhuǎn)折車速基本可以確定。
4 Auto模式下瞬態(tài)分析
穩(wěn)態(tài)分析考查了車速與第4軸轉(zhuǎn)角和橫擺角速度的關(guān)系。對(duì)于瞬態(tài)過程可以從固有頻率、阻尼比和反應(yīng)時(shí)間來(lái)研究。
首先研究F4ws模式下的瞬態(tài)特性。將式(4)進(jìn)行Laplace反變換,并且令第4軸轉(zhuǎn)角為零,可得F4ws模式下橫擺角速度的2階振動(dòng)微分方程為
(28)
第1軸角階躍輸入時(shí),其轉(zhuǎn)角的數(shù)學(xué)表達(dá)式為
(29)
當(dāng)t>0時(shí),式(28)可簡(jiǎn)化為
(30)
其中固有頻率ω0和阻尼比ζ為
(31)
(32)
式(30)是一個(gè)2階常系數(shù)非齊次微分方程,它的通解由一個(gè)特解和所對(duì)應(yīng)齊次微分方程的通解組成,因此它的通解可以寫為
(33)
其中
(34)
式中:A0為特解;A1,A2,A3,A4,A5,A6都是積分常數(shù),可以根據(jù)運(yùn)動(dòng)的初始條件來(lái)確定。角階躍輸入下的初始條件可寫為
(35)
結(jié)合初始條件和通解方程可求出相應(yīng)的積分常數(shù),求解過程在此省略,各積分常數(shù)表述如下:
(36)
(37)
A3=-A0
(38)
A4=r0-ω0A0
(39)
(40)
(41)
采用角階躍輸入,橫擺角速度第一次到達(dá)穩(wěn)態(tài)值A(chǔ)0所需的時(shí)間為反應(yīng)時(shí)間τ,但也可以取到達(dá)穩(wěn)態(tài)值0.95A0的時(shí)間作為反應(yīng)時(shí)間。此處取到達(dá)95%穩(wěn)態(tài)值所對(duì)應(yīng)的時(shí)間。即當(dāng)t=τ時(shí),將r(τ)=0.95A0代入式(33)可得
(42)
若令0.05A0=0,可推導(dǎo)出到達(dá)100%穩(wěn)態(tài)時(shí)的反應(yīng)時(shí)間的公式,而當(dāng)0.05A0≠0時(shí),式(42)為超越方程,可進(jìn)行數(shù)值求解。
接下來(lái)分析采用控制器一時(shí)的瞬態(tài)特性。將式(18)進(jìn)行Laplace反變換,可得到Auto模式采用控制器一時(shí)橫擺角速度的2階振動(dòng)微分方程為
(43)
同理,采用零時(shí)刻角階躍輸入時(shí)可以將式(43)簡(jiǎn)化為
(44)
式中的ω0和ζ仍然是式(31)和式(32)所表達(dá)的固有頻率和阻尼比,說(shuō)明控制器一的加入并不改變車輛的固有頻率和阻尼比。但反應(yīng)時(shí)間會(huì)因特解和初值的不同有所變化。此時(shí)的特解變?yōu)?/p>
(45)
零時(shí)刻下的橫擺角速度初值變?yōu)?/p>
(46)
由式(45)給出的特解和式(46)給出的橫擺角速度初值,仍然可用式(42)求出采用控制器一時(shí)的橫擺角速度到達(dá)95%穩(wěn)態(tài)值的反應(yīng)時(shí)間。
最后考查采用控制器二時(shí)的瞬態(tài)響應(yīng)。將式(24)進(jìn)行Laplace反變換可得到采用控制器二時(shí)橫擺角速度的2階振動(dòng)微分方程為
(47)
同理,采用零時(shí)刻角階躍輸入時(shí)可將式(47)簡(jiǎn)化為
(48)
其中固有頻率ω0和阻尼比ζ變?yōu)?/p>
(49)
(50)
可見控制器二改變了車輛的固有頻率和阻尼比。此時(shí)的特解和橫擺角速度初值也變?yōu)?/p>
(51)
(52)
同樣,將式(51)和式(52)代入式(42)便可求解出采用控制器二時(shí)橫擺角速度到達(dá)95%穩(wěn)態(tài)值的反應(yīng)時(shí)間。限于篇幅,對(duì)瞬態(tài)特性不進(jìn)行仿真分析。
5 結(jié)論
當(dāng)前兩軸和后兩軸分別成比例轉(zhuǎn)向時(shí)可便于Auto模式控制器的設(shè)計(jì)和理論分析。以減小質(zhì)心側(cè)偏角為目標(biāo),轉(zhuǎn)折車速便是前、后逆向轉(zhuǎn)向和同向轉(zhuǎn)向的分界線,并且一旦車輛特性參數(shù)確定后,此轉(zhuǎn)折車速也便確定。在前面假設(shè)的基礎(chǔ)上,設(shè)計(jì)了兩種控制器,從理論和仿真兩方面對(duì)雙前橋轉(zhuǎn)向、采用控制器一的全輪轉(zhuǎn)向和采用控制器二的全輪轉(zhuǎn)向作了對(duì)比分析。結(jié)果表明,雙前橋轉(zhuǎn)向與采用控制器一的全輪轉(zhuǎn)向具有相同的系統(tǒng)特征根、固有頻率和阻尼比,而控制器一與控制器二具有相同的穩(wěn)態(tài)第4軸轉(zhuǎn)角輸出和穩(wěn)態(tài)橫擺角速度。
[1] Bayar K, Unlusoy Y S. Steering Strategies for Multi-axle Vehicles[J]. International Journal of Heavy Vehicle Systems,2008,15:208-236.
[2] Watanabe K, Yamakawa J, Tanaka M, et al. Turing Characteristics of Multi-axle Vehicles[J]. Journal of Terramechanics,2007,44:81-87.
[3] 王定華,李龍銀.一種載貨車雙前橋轉(zhuǎn)向機(jī)構(gòu)的設(shè)計(jì)[J].合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2007,30:73-76.
[4] Williams D E. Generalised Multi-axle Vehicle Handling. Vehicle System Dynamics[J].2012,50(1):149-166.
A Research on the Automatic Mode of All-wheel Steering for Four-axle Vehicle
Chen Sizhong1& Zheng Kaifeng2
1.SchoolofMechanicalEngineering,BeijingInstituteofTechnology,Beijing100081; 2.ChinaNorthVehicleResearchInstitute,Beijing100072
Under the condition of that the wheel turning angles in second and third axles are respectively proportional to those of first and fourth axles, the differences between all wheel steering and double-front-axle steering are analyzed theoretically. Then with the sideslip angle of mass center set to zero, controller 1 and controller 2 are designed, and the differences and connections between double-front-axle steering, all wheel steering with controller 1 and all wheel steering with controller 2 are analyzed again, providing theoretical references for the research on the all wheel steering technique for four-axle vehicle.
four-axle vehicle; all-wheel steering; automatic mode
*工業(yè)和信息化部項(xiàng)目(C2220061355)資助。
原稿收到日期為2012年11月12日,修改稿收到日期為2013年3月20日。