基于ESP功能分配的EPS回正力矩補償控制策略*
2015-04-12 05:22:45陳無畏趙林峰
汽車工程 2015年7期
楊 軍,陳無畏,趙林峰,黃 鶴,高 明
(1.合肥工業(yè)大學(xué)機械與汽車工程學(xué)院,合肥 230009; 2.中航工業(yè)株洲易力達有限公司,株洲 412000)
?
2015138
基于ESP功能分配的EPS回正力矩補償控制策略*
楊 軍,陳無畏,趙林峰,黃 鶴,高 明
(1.合肥工業(yè)大學(xué)機械與汽車工程學(xué)院,合肥 230009; 2.中航工業(yè)株洲易力達有限公司,株洲 412000)
在所建整車七自由度模型的基礎(chǔ)上,深入分析了電子穩(wěn)定程序(ESP)對電動助力轉(zhuǎn)向系統(tǒng)(EPS)工作模式的影響,設(shè)計了非線性滑模控制器,并計算出整車橫擺運動所需的穩(wěn)定控制力參考值,運用功能分配的方法對穩(wěn)定控制力進行合力動態(tài)分配,同時考慮在低附著系數(shù)路面汽車車輪自回正力矩的嚴重缺失,從而提出基于ESP作用的回正力矩補償控制策略,對EPS的工作模式進行修正。硬件在環(huán)仿真和軟件仿真的結(jié)果表明,提出的控制策略不僅改善了轉(zhuǎn)向系統(tǒng)的回正性能,而且能夠使車輛快速、準確地恢復(fù)到穩(wěn)定行駛的狀態(tài),提高了其操縱穩(wěn)定性。
電動助力轉(zhuǎn)向;電子穩(wěn)定程序;功能分配;回正力矩;硬件在環(huán)仿真
前言
電動助力轉(zhuǎn)向系統(tǒng)(electric power steering system, EPS)用電機作為執(zhí)行器來提供助力。它能夠提高汽車主動安全性,節(jié)能、環(huán)保而且容易實現(xiàn)產(chǎn)品模塊化,因而受到越來越多的關(guān)注。許多專家學(xué)者對EPS進行了深入研究,并取得了較好的控制效果。文獻[1]中提出了一種基于轉(zhuǎn)向盤轉(zhuǎn)角估計的比例積分微分控制算法,以提高車輛回正性能。文獻[2]中通過大量試驗采集相關(guān)數(shù)據(jù)以提供電動機回正力矩。從現(xiàn)有文獻中看出,EPS在低速區(qū)域主要集中研究其助力特性;在高速區(qū)域則主要保證EPS路感和行駛穩(wěn)定性,基本不考慮其助力特性。文獻[3]和文獻[4]中指出當汽車行駛在低附著系數(shù)路面時,EPS回正力矩嚴重缺失,提出基于回正力矩補償?shù)腅PS控制策略,實驗結(jié)果表明控制效果良好。隨著技術(shù)的進步和人們對車輛安全要求的提高,電子穩(wěn)定性程序(electronic stability program, ESP)也逐漸倍受關(guān)注,它是車輛行駛主動安全系統(tǒng)之一,包含了防抱死制動系統(tǒng)(ABS)和驅(qū)動力控制系統(tǒng)(TCS)等,并增加了橫擺力矩控制系統(tǒng)(YMC),從而在制動、驅(qū)動和轉(zhuǎn)向情況下對汽車安全穩(wěn)定行駛提供了有力支持。隨著更多汽車裝備ESP系統(tǒng),利用ESP工作時得到的汽車狀態(tài)信息進行EPS控制策略優(yōu)化也備受關(guān)注。文獻[5]中利用前輪主動轉(zhuǎn)向系統(tǒng)(AFS)對駕駛員的過多轉(zhuǎn)向操作進行回正力矩補償控制,以改善車輛的側(cè)向穩(wěn)定性。此外,電動助力轉(zhuǎn)向系統(tǒng)除用來對轉(zhuǎn)向操作進行助力和回正控制外,還可采用將車輛橫擺角速度反饋給EPS的方法來改善車輛操縱穩(wěn)定性,有效減小轉(zhuǎn)向過程中橫擺角速度的振蕩和超調(diào),以達到改善操縱穩(wěn)定性的目的[6-7]。從現(xiàn)有文獻中可以看出,目前針對同時配置有EPS與ESP的車輛,進行ESP對EPS控制策略影響的研究很少。
本文中正是進行這方面的研究。一輛同時配置EPS與ESP的汽車在低附著系數(shù)路面高速轉(zhuǎn)彎行駛并處于失穩(wěn)狀態(tài)時,路面回正力矩嚴重不足,因此,須要充分運用ESP中得到的狀態(tài)信息,對傳統(tǒng)EPS回正力矩補償控制策略進行重新修正,從而提出基于ESP作用的EPS回正力矩補償控制策略。
1 系統(tǒng)模型的建立
1.1 車輛模型
采用七自由度非線性汽車動力學(xué)模型,如圖1所示。其七自由度包括縱向、側(cè)向、橫擺運動和4個車輪的回轉(zhuǎn)運動。數(shù)學(xué)表達式為
(1)
(2)
(3)
其中:
(4)
(5)
(6)

1.2 EPS模型
本文中采用轉(zhuǎn)向軸助力式電動助力轉(zhuǎn)向系統(tǒng)[8],其基本組成包括轉(zhuǎn)矩傳感器、轉(zhuǎn)角傳感器、車速傳感器、電控單元(ECU)、電動機和減速機構(gòu)等。其動力學(xué)方程為
(7)
式中:Je和ce分別為系統(tǒng)總當量慣性矩和阻尼系數(shù);Ta為助力轉(zhuǎn)矩;Tor為轉(zhuǎn)矩傳感器測量值;θp為轉(zhuǎn)向小齒輪轉(zhuǎn)角;Text為路面作用于輪胎等效至轉(zhuǎn)向柱的轉(zhuǎn)矩,Text=M(1/G2),G2為轉(zhuǎn)向軸至前輪的傳動比,M為車輛兩前輪回正力矩之和。
1.3 輪胎模型
仿真采用Dugoff非線性輪胎模型。它需要的參數(shù)較少,能較好地表達出輪胎非線性特征,其表達式為
Fxn=fnCxnζn(n=1,2,3,4)
(8)
Fyn=fnCynαn
(9)
(10)
(11)
式中:Cxn,Cyn分別為輪胎縱、側(cè)向剛度;αn為輪胎側(cè)偏角;Fzn為輪胎垂直載荷;ζn為輪胎滑移率;μ為路面附著系數(shù)。
各輪側(cè)偏角表達式為
(12)
(13)
2 ESP系統(tǒng)對EPS影響分析
3 控制策略設(shè)計
通過第2節(jié)中ESP系統(tǒng)對EPS影響的分析,在準危險工況下,有必要對EPS傳統(tǒng)控制策略做出修正。圖2為設(shè)計的控制系統(tǒng)結(jié)構(gòu)圖。
首先依據(jù)汽車當前已知的行駛狀態(tài),即前輪轉(zhuǎn)向角δ和縱向加速度ad,x,結(jié)合汽車二自由度參考模型分別計算出汽車縱向速度期望值ud、側(cè)向速度期望值vd和橫擺角速度期望值γd。結(jié)合汽車當前行駛狀態(tài),即通過車載傳感器所得相應(yīng)測量值,利用控制器計算出汽車橫擺運動所需穩(wěn)定控制力期望值Fud,以保證汽車運行狀態(tài)能夠較好地跟蹤汽車參考模型。最終Fud將被最優(yōu)分配到4個車輪上。此時,通過改變兩前輪的側(cè)向力信號輸入到EPS控制模塊中,計算出路面作用于輪胎的回正力矩。在EPS控制模塊中,將得出的實際回正力矩值與期望回正力矩值一起輸入到回正力矩控制器,計算出需要補償(附加)的助力矩ΔTa,并通過助力電機作用到轉(zhuǎn)向系統(tǒng)上,從而保證帶有該集成控制系統(tǒng)的汽車可以獲得最佳的動態(tài)性能。
4 非線性滑模控制器設(shè)計與合力分配
4.1 非線性滑模控制器設(shè)計
基于車輛行駛工況的復(fù)雜性,本文中設(shè)計了非線性滑模控制器,保證其具有足夠的魯棒性,具體設(shè)計方法見文獻[10]。
(14)

(15)
(16)
令Fud=(FxdFydMzd)T
式中:Fxd,F(xiàn)yd和Mzd分別為整車所受的縱向、側(cè)向合力參考值和橫擺合力矩參考值;sat(sp/φp)為飽和函數(shù);sp為切換函數(shù);φp為邊界層厚度,φp>0;ηp為可變常數(shù);λp為正數(shù)(p=1,2,3)。
4.2 合力動態(tài)分配
確定了Fud以后,就要將其分解到4個車輪。而輪胎力分配本質(zhì)是一個有約束的多變量優(yōu)化問題,應(yīng)同時兼顧分配精度和控制能量。本文中采取基于功能分配的合力動態(tài)分配方法[11],根據(jù)實際橫擺轉(zhuǎn)矩與期望值偏差進行力分配。由第2節(jié)和式(6)可知,回正力矩計算主要涉及兩前輪側(cè)向力,因此在合力動態(tài)分配過程中,可通過調(diào)節(jié)縱向力和兩前輪側(cè)向力之和的功能分配系數(shù)來達到預(yù)期目的。
首先分解縱向力。定義橫擺轉(zhuǎn)矩誤差為
(17)
由式(6)可得,縱向力產(chǎn)生的橫擺轉(zhuǎn)矩為
(18)
令Mx=k1eM
(19)
通過選擇系數(shù)k1,使縱向力產(chǎn)生的橫擺轉(zhuǎn)矩補償橫擺轉(zhuǎn)矩誤差。為使分配結(jié)果不超過附著極限,按式(20)進行二次規(guī)劃。用拉格朗日乘數(shù)法容易求得該問題的解析解。
(20)
式中:axi為地面最大摩擦力,axi=μFzi;k2,k3,k4和k5為各縱向力的功能分配系數(shù)。實際中,由于后輪側(cè)向力與縱向力耦合,僅由式(19)不能完全補償橫擺轉(zhuǎn)矩誤差,須通過前輪側(cè)向力的調(diào)整,進一步提高橫擺轉(zhuǎn)矩跟蹤精度。
從式(6)可以看出,兩個前輪側(cè)向力產(chǎn)生的橫擺轉(zhuǎn)矩僅與二者之和有關(guān),記Fyf=Fyfl+Fyfr,采用式(21)計算Fyf當前值:
Fyf(k)=Fyf(k-1)+k6eM
(21)
式中:Fyf與eM之間的脈沖傳遞函數(shù)是一個積分環(huán)節(jié),可以消除階躍響應(yīng)下的穩(wěn)態(tài)誤差。最后依據(jù)垂向力大小,按比例分配前輪側(cè)向力,即
5 回正力矩控制器設(shè)計
圖3為車速72km/h,路面附著系數(shù)為0.3時,由整車模型仿真出回正力矩與車輪側(cè)偏角的關(guān)系圖。初始時,回正力矩隨側(cè)偏角的增加而增大,在某一側(cè)偏角時達到最大值;隨著側(cè)偏角繼續(xù)增大,回正力矩反而下降,此種情況下,增加了駕駛員駕駛負擔且喪失路感,因此須利用ESP所獲得的整車運動狀態(tài)信息,并通過EPS的作用對回正力矩進行補償。
圖3中陰影部分為目標區(qū)域,正常所須回正力矩應(yīng)為虛線部分,而實際回正力矩值明顯不足,這需要EPS配合添加補償值。當路面回正力矩嚴重不足時,駕駛員在此種情況下由于缺乏路感而導(dǎo)致無法正常駕駛,利用EPS對缺失的回正力矩進行補償可以減輕駕駛員操縱負擔,但在危急工況下無法保證駕駛員駕駛手感及路感,因此容易導(dǎo)致回正超調(diào)等情況出現(xiàn),反而更會引起駕駛員的慌亂。本文中為有效減小此種情況產(chǎn)生的不利影響,引入與回正力矩變化率成正比的負反饋來實現(xiàn)EPS阻尼控制,從而削弱駕駛員快速改變前輪轉(zhuǎn)角的能力。

其中實際回正力矩為
(22)
式中:M1,M2分別為車輛前左、右輪實際回正力矩;e1,e2分別為車輛前左、右輪輪胎拖矩,eq=emq+epq(q=1,2,分別表示前左、右輪),emq為機械拖距,其為常數(shù),epq為氣胎拖距,隨前輪質(zhì)心側(cè)偏角、側(cè)偏剛度以及輪胎與路面摩擦因數(shù)而改變[12],其初值為ep0。
(23)
參考回正力矩為
Mc=αq(?Mz/?α)
式中:Mc為參考回正力矩;(?Mz/?α)為側(cè)偏角與回正力矩處于線性狀態(tài)時的斜率;αq為前左右輪實時側(cè)偏角。
(1) 當τ較大時,為盡快消除偏差,提高響應(yīng)速度,應(yīng)取較大的KP;同時為避免出現(xiàn)較大的超調(diào),一般取KI=0。
(2) 當τ較小時,為減小偏差,并防止超調(diào)過大產(chǎn)生振蕩,KP應(yīng)減小,KI取小值。
(3) 當τ很小時,為消除靜差,克服超調(diào),使系統(tǒng)盡快穩(wěn)定,KP值繼續(xù)減小,KI值不變或稍大。
(6) 微分作用可改善系統(tǒng)動態(tài)特性,阻止τ變化,有助于減小超調(diào)量,消除振蕩,縮短調(diào)節(jié)時間,允許加大KD,使系統(tǒng)穩(wěn)態(tài)誤差減小,提高控制精度,達到滿意的控制效果。因此,在τ比較大時,KD=0,實際為PI控制;在τ比較小時,KD取適中值,實行PID控制。
式中:KPt,KIt和KDt為參數(shù)KP,KI和KD在不同狀態(tài)下的加權(quán)。
由此可得到回正力矩控制器(PID)的輸出:
(24)
式中:ΔTa為補償?shù)幕卣兀籏為針對回正力矩變化率的補償系數(shù)。
6 仿真計算與分析
為驗證新回正力矩補償控制策略的有效性,分兩部分進行仿真:一是對比在高速低附著系數(shù)路面上,有ESP參與與沒有ESP參與的回正力矩控制策略仿真;二是車輛穩(wěn)定性仿真。結(jié)果表明,新控制策略不僅能夠準確快速地補償不足回正力矩,且提高了操縱穩(wěn)定性。仿真車輛的部分參數(shù)如表1所示。
6.1 回正力矩補償對比
進行車速72km/h,路面附著系數(shù)0.30,轉(zhuǎn)向盤輸入180°時變道試驗和90°時讓轉(zhuǎn)向盤自動回正性能試驗仿真,結(jié)果分別如圖5和圖6所示。
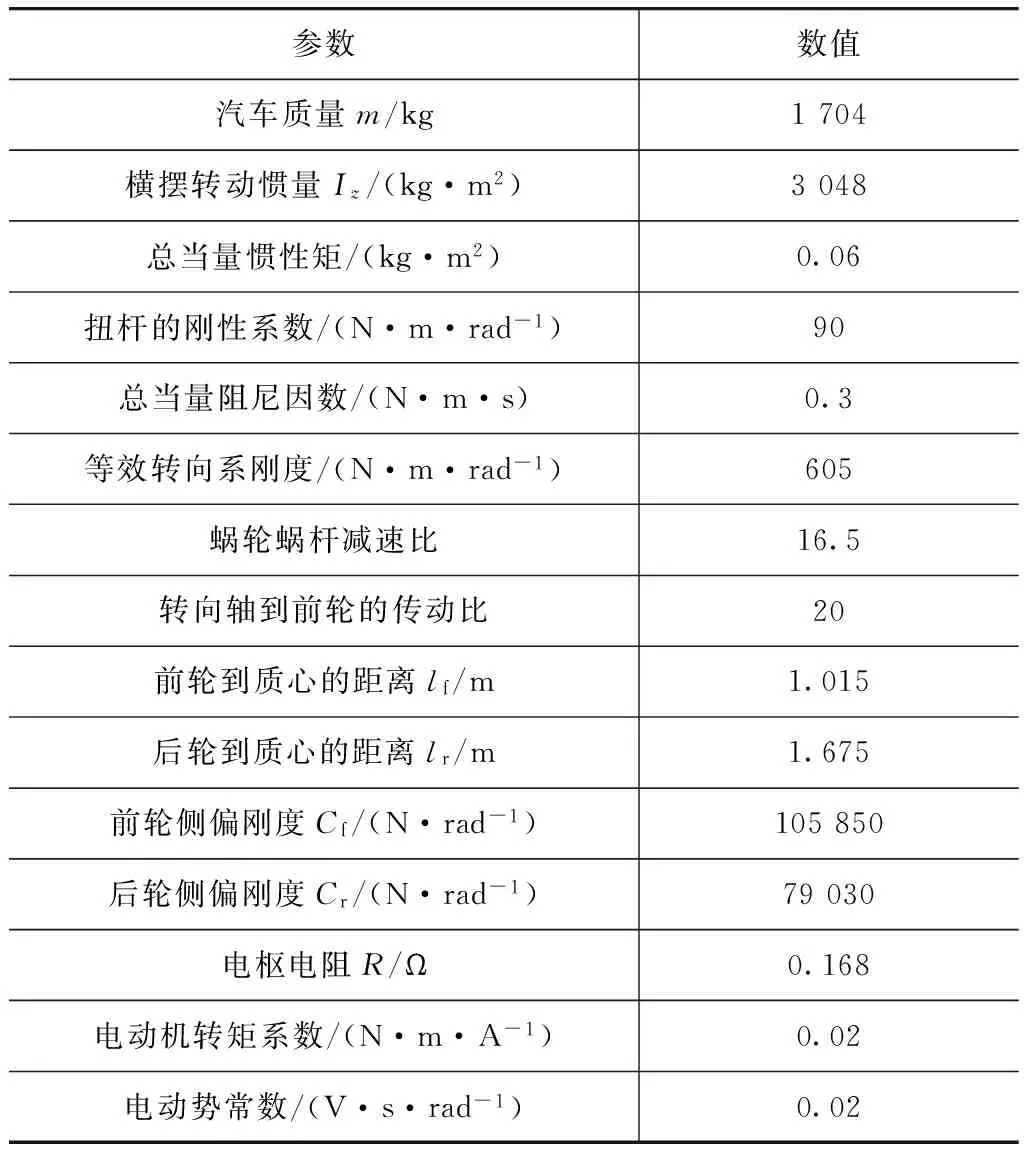
表1 車輛部分結(jié)構(gòu)參數(shù)
從圖5中可以看出:新回正力矩補償控制策略比傳統(tǒng)EPS控制策略響應(yīng)時間短,而且橫擺角速度幅值有所減小,這表示新控制策略能在操縱穩(wěn)定性方面提供一定幫助;同時轉(zhuǎn)向盤轉(zhuǎn)角幅值變小,減輕駕駛負擔,提高了車輛行駛安全性。圖6中比較了兩種控制策略的轉(zhuǎn)向盤殘余角,它直觀地代表車輛的回正性能。圖6顯示出新控制策略的殘余角比傳統(tǒng)EPS的小,說明其回正性能比傳統(tǒng)的EPS好。
6.2 車輛穩(wěn)定性仿真
如上所述,在ESP工作時,側(cè)向力改變導(dǎo)致電機助力發(fā)生改變。由圖5可知,新回正力矩補償控制策略在一定程度上改善了操縱系統(tǒng)的穩(wěn)定性。因此,采用上述控制策略,對汽車無ESP控制、有ESP控制、EPS+ESP控制條件下,進行前輪轉(zhuǎn)角角階躍、變道輸入的仿真計算。給定車輛初始速度為72km/h,路面附著系數(shù)為0.30,前輪轉(zhuǎn)角輸入為0.1rad。結(jié)果如圖7~圖10所示。
從圖7~圖10中可知:汽車在低附著系數(shù)路面沒有施加控制時,側(cè)偏角和橫擺角速度響應(yīng)幅值很大;施加ESP控制后其幅值明顯減小,而新回正力矩補償策略(EPS+ESP)使汽車能夠更快地趨于穩(wěn)定,縮短恢復(fù)時間,提高汽車操縱的穩(wěn)定性。
7 硬件在環(huán)仿真試驗
為充分驗證控制策略的有效性,在仿真試驗基礎(chǔ)上,進行硬件在環(huán)仿真試驗。硬件在環(huán)試驗平臺如圖11所示。以某款裝有EPS和ESP系統(tǒng)的汽車作為實驗用車,EPS控制系統(tǒng)采用永磁同步電機,控制芯片采用ARM單片機STM32。ESP控制系統(tǒng)采用飛思卡爾MC9S12XS128作為其控制單元。回正力矩控制器利用ARM單片機LPC2129作為控制單元。基于汽車參數(shù)在veDYNA中建立整車模型,并根據(jù)ISO 3888規(guī)定的單移線測試標準和GB/T 6323.2—1994規(guī)定的轉(zhuǎn)向瞬態(tài)響應(yīng)實驗來建立虛擬試驗場地。子控制器輸出信號可以通過接口系統(tǒng)分別與EPS助力電機和ESP液壓系統(tǒng)中的電磁閥相連;硬件系統(tǒng)為該試驗車液壓系統(tǒng),去掉原裝控制系統(tǒng)(EPS/ESP),采用自主研發(fā)的控制系統(tǒng)、回正力矩補償控制器電路板和各種車載傳感器等。
試驗設(shè)備主要包括汽車制動液壓系統(tǒng)、汽車轉(zhuǎn)向系統(tǒng)、各種傳感器、回正力矩補償電路板、EPS與ESP兩子系統(tǒng)電路板、Labview的PXI主機、SCB-68接線板和PC機等。試驗車速設(shè)定為72km/h,虛擬道路附著系數(shù)為0.3。試驗結(jié)果如圖12~圖15所示。
從圖12~圖15中可知,硬件在環(huán)閉環(huán)仿真的結(jié)果與軟件仿真結(jié)果的趨勢基本一致。說明本文中所提出的控制策略不僅增加了轉(zhuǎn)向系統(tǒng)的回正性能,而且能夠使車輛快速、準確地恢復(fù)到穩(wěn)定行駛的狀態(tài),提高了車輛的操縱穩(wěn)定性。
8 結(jié)論
(1) 采用非線性滑模控制器計算出車輛穩(wěn)定的控制力,并通過合理的選擇功能分配系數(shù)進行合力動態(tài)分配,很好地將合力分配到輪胎上。
(2) 通過分析ESP系統(tǒng)對轉(zhuǎn)向系統(tǒng)的影響,修正EPS的控制策略,提出了回正力矩補償?shù)目刂撇呗裕⒉捎米赃m應(yīng)模糊PID控制方法,提高了車輛的回正性能。
(3) 仿真和硬件在環(huán)仿真表明,設(shè)計的控制策略提高了車輛在低附著路面上的回正性能,同時使車輛能夠快速、準確地恢復(fù)到穩(wěn)定行駛的狀態(tài),提高了汽車的行駛穩(wěn)定性。
[1] 徐建平,何仁,苗立東,等.電動助力轉(zhuǎn)向系統(tǒng)回正控制算法研究[J].汽車工程,2004,26(5):557-559.
[2] Masahiko Kurishige, Shunichi Wada, et al. A New EPS Control Strategy to Improve Steering Wheel Returnability[C].2000 World Congress Detroit, Michigan March 6-9,2000.
[3] Hideyuki Tanaka. Development of Torque Controlled Active Steering with Improving the Vehicle Stability for Brushless EPS[C]. 2007 World Congress Detroit, Michigan April 16-19,2007.
[4] Yasuo Shimizu, Toshitake Kawai. Development of Electric Power Steering[C]. SAE Paper 910014.
[5] Tanaka H, et al. Development of Torque Controlled Active Steering with Improving the Vehicle Stability for Brushless EPS[C].SAE Paper 2007-01-1147.
[6] Yang Zhanpeng. Effect of Yaw Velocity Feed Back in Electric Power Steering System on Handling Stability of Vehicle[C]. The 2nd International Conference on Mechanic Automation and Control Engineering, July 15-17,2011,Inner Mongolia, China, MACE,2011:260-262.
[7] Roy M. Variable Effort Steering for Vehicle Stability Enhancement Using an Electric Power Steering System[C]. SAE Paper 2000-01-0817.
[8] 趙林峰,陳無畏,秦明輝,等.基于轉(zhuǎn)向輕便性及回正性能設(shè)計的EPS應(yīng)用[J].機械工程學(xué)報,2009,45(6):182-187.
[9] 王德平,郭孔輝,宗長福.車輛動力學(xué)穩(wěn)定性控制的理論研究[J].汽車工程,2000,22(1):7-9.
[10] Fernández B, Hedrick J K. Generalized Sliding Mode Control for MIMO Nonlinear Systems[J]. International Journal of Control,1998,46(3):1019-1040.
[11] 劉躍,方敏,王洪波.車輛穩(wěn)定控制中的合力計算與分配方法計算[C].第31屆中國控制會議.
[12] Hsu Yung-Hsiang Judy, Gerdes J Christian. A Feel for the Road: A Method to Estimate Tire Parameters Using Steering Torque[J]. AVEC ’06.
[13] 陳無畏,劉翔宇,等.考慮路面影響的車輛穩(wěn)定性控制質(zhì)心側(cè)偏角動態(tài)邊界控制[J].機械工程學(xué)報,2012,48(14).
The Aligning Moment Compensation Strategy forEPS Based on ESP Function Allocation
Yang Jun1, Chen Wuwei1, Zhao Linfeng1, Huang He1& Gao Ming2
1.SchoolofMechanicalandAutomotiveEngineering,HFUT,Hefei230009; 2.ZhuzhouEliteElectroMechanicalCo.,Ltd.,Zhuzhou412000
An in-depth analysis on the influence of ESP on EPS assistance mode is conducted based on a 7 DOF vehicle model built. A nonlinear sliding mode controller is designed, the reference value of stability control force for yaw motion is calculated, and the dynamic allocation of resultant stability control force is performed with function allocation method. With consideration of the seriously inadequate self-aligning moment of vehicle wheels on low adhesive road, an ESP-based aligning moment compensation control strategy is proposed with ESP working mode corrected. The results of both hardware-in-the-loop simulation and software simulation show that the control strategy proposed can not only improve the aligning performance of steering system, but also make vehicle quickly and accurately return to its stable driving state and thus enhance its handling stability.
electric power steering; electronic stability program; function allocation; aligning moment; hardware-in-the-loop simulation
*國家自然科學(xué)基金(51375131,51305118)、中航工業(yè)創(chuàng)新基金(cxy2010HFGD27,cxy2010HFGD26)和安徽省自然科學(xué)基金(2013AKZR0077)資助。
原稿收到日期為2013年4月8日,修改稿收到日期為2014年3月5日。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
能源工程(2020年6期)2021-01-26 00:55:22
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年17期)2017-09-08 13:08:58
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26